Изобретение относится к измерительной технике и может быть использовано при настройке тензорезисторных датчиков с мостовой измерительной цепью по мультипликативной температурной погрешности.
Известен способ компенсации мультипликативной температурной погрешности мостовой схемы (см. Проектирование датчиков для измерения механических величин. Под редакцией Е.П.Осадчего, 1979 г.), заключающийся в установке в цепь питания мостовой измерительной схемы термозависимого компенсационного резистора Rα и расчете его номинала через физические характеристики элементов, входящих в состав датчика.
Однако использование данного способа при настройке датчиков не учитывает нелинейность выходного сигнала датчика от температуры.
При этом дополнительная температурная погрешность от нелинейности выходного сигнала датчика от температуры достигает значительных величин.
Нелинейность выходного сигнала от температуры определяется тремя факторами:
- величиной температурного коэффициента сопротивления (ТКС) тензорезисторов и его нелинейностью от температуры;
- величиной температурного коэффициента тензочувствительности (ТКЧ) тензорезисторов и его нелинейностью от температуры;
- величиной температурного коэффициента модуля упругости (ТКМУ) материала упругого элемента и его нелинейностью от температуры.
Т.о., в зависимости от их соотношения нелинейность выходного сигнала датчика может иметь либо возрастающий, либо затухающий характер.
Выражение для ТКС тензорезисторов имеет вид [см. Теория, расчет и основы проектирования датчиков механических величин. В.А.Тихоненков, 2000 г.]:
где  - температурный коэффициент удельного сопротивления материала тензорезистора;
- температурный коэффициент удельного сопротивления материала тензорезистора;
ρ - удельное сопротивление материала тензорезистора;
 - температурный коэффициент линейного расширения материала тензорезистора (ТКЛР);
- температурный коэффициент линейного расширения материала тензорезистора (ТКЛР);
l - длина тензорезистора.
В соответствии с выражением (1) ТКС тензорезистора имеет затухающий характер, то есть с ростом температуры будет уменьшаться, так как его ТКЛР для конструкционных материалов всегда имеет положительное значение.
Выражение для температурного коэффициента тензочувствительности (ТКЧ) тензорезистора имеет вид [см. Теория, расчет и основы проектирования датчиков механических величин. В.А.Тихоненков, 2000 г.]:

где  - температурный коэффициент теплоемкости материала тензорезистора;
- температурный коэффициент теплоемкости материала тензорезистора;
Cν - теплоемкость материала тензорезистора.
В соответствии с выражением (2) ТКЧ тензорезистора будет иметь возрастающий характер, то есть с ростом температуры будет увеличиваться, однако тензорезисторы, собранные в мостовую цепь, могут привести как к возрастанию, так и уменьшению ТКЧ мостовой цепи, в зависимости от плеча установки тензорезистора.
Выражение для мультипликативной температурной чувствительности имеет вид [см. Теория, расчет и основы проектирования датчиков механических величин. В.А.Тихоненков, 2000 г.]:

где ηэ - ТКМУ материала упругого элемента (УЭ);
αд - ТКЧ тензорезисторов;
ΔUвыхt - приращение выходного сигнала при воздействии температуры;
Uн - выходной сигнал датчика на нагрузке Rн>500 кОм.
Для всех конструкционных материалов ТКМУ имеет отрицательное значение и убывающий характер с ростом температуры, что в соответствии с выражением (3) приводит к уменьшению мультипликативной погрешности с ростом температуры.
Обозначив выражение (3) через ТКЧ тензорезисторов αд, с учетом сопротивления измерительной цепи питания (внутреннего сопротивления источника питания и дополнительного резистора, используемого для подгонки чувствительности мостовой цепи) выходные сигналы при работе датчика в режиме холостого хода (сопротивление нагрузки более 500 кОм) без воздействия и при воздействии температуры будут иметь вид [см. Теория, расчет и основы проектирования датчиков механических величин. В.А.Тихоненков, 2000 г.]:
где E - ЭДС источника питания;
Rвх - входное сопротивление мостовой цепи;
Ri -сопротивление подгонки чувствительности мостовой цепи;
 - суммарное относительное изменение сопротивления тензорезисторов от измеряемого параметра;
- суммарное относительное изменение сопротивления тензорезисторов от измеряемого параметра;
αд - ТКЧ тензорезисторов;
αr - ТКС входного сопротивления мостовой цепи.
Анализ выражения (5) показывает, что использование мостовой измерительной цепи также приводит к появлению дополнительной нелинейности выходного сигнала от температуры при наличии зависимости от температуры ТКС входного сопротивления мостовой цепи и ТКЧ тензорезисторов:
- при уменьшении αr с ростом температуры выходной сигнал будет иметь затухающий характер;
- при увеличении αд с ростом температуры выходной сигнал датчика будет иметь возрастающий характер;
- при уменьшении αд с ростом температуры выходной сигнал датчика будет иметь затухающий характер.
Таким образом, если αr и αд имеют одинаковый характер изменения от температуры (убывающий), то датчик будет иметь убывающий характер выходного сигнала при изменении температуры (отрицательная нелинейность), а при влиянии αr меньше влияния αд, когда последний будет иметь возрастающий характер от температуры, то датчик будет иметь возрастающий характер выходного сигнала при изменении температуры (положительная нелинейность).
Проведенный анализ показывает, что нелинейность выходного сигнала датчика при изменении температуры объясняется изменением общего температурного коэффициента тензочувствительности (ТКЧ) мостовой цепи αдо при изменении температуры. Изменение общего ТКЧ мостовой цепи определяется как изменением ТКС входного сопротивления от температуры αr, так и изменением ТКЧ тензорезисторов αд. Аналитическое выражение для расчета ТКЧ мостовой цепи может быть определено из выражения [см. Теория, расчет и основы проектирования датчиков механических величин. В.А.Тихоненков, 2000 г.]:

Подставляя в уравнение (6) выражения (4) и (5) и произведя несложные математические преобразования, получим:

Выражение (7) позволяет количественно оценить области существования нелинейности общего ТКЧ мостовой цепи, т.е. определить знак нелинейности выходного сигнала при изменении температуры от соотношения αr и αд. Так как нелинейность ТКС входного сопротивления мостовой цепи от температуры Δαr и нелинейность ТКЧ мостовой цепи от температуры Δαдо имеют один и тот же порядок, то можно принять, что изменение αдо при изменении температуры  . Воспроизводимые в процессе изготовления αr находятся в пределах (0,1-10)·10-4 1/°С и αд - в пределах (1-10)·10-4 1/°С.
. Воспроизводимые в процессе изготовления αr находятся в пределах (0,1-10)·10-4 1/°С и αд - в пределах (1-10)·10-4 1/°С.
Для оценки влияния нелинейности ТКЧ тензорезисторов на температурную погрешность рассмотрим пример компенсации мультипликативной температурной погрешности в соответствии с прототипом и определим полученную температурную чувствительность после компенсации от наличия нелинейности ТКЧ мостовой цепи.
Пример
Определить температурные чувствительности в крайних значениях температурного диапазона эксплуатации датчика с равноплечей мостовой измерительной цепью, у которого:
- сопротивления тензорезисторов R1=R2=К3=R4=1000 Ом;
- ТКС термозависимого компенсационного резистора Ra не зависит от температуры и равен αk=4·10-3 1/°С;
- ТКС входного сопротивления мостовой цепи в крайних значениях температурного диапазона соответственно равны αr +=1·10-3 1/°С, αr -=1.01·10-3 1/°С;
- ТКЧ тензорезисторов в крайних значениях температурного диапазона соответственно равны α∂ +=1·10-3 1/°С, α∂ -=1,01·10-3 1/°С;
- суммарное относительное изменение сопротивления тензорезисторов при номинальном значении измеряемого параметра  ;
;
- температурный диапазон эксплуатации датчика 20±100°С;
- напряжение питания мостовой цепи Un=10 В.
Решение
Определим в соответствии с прототипом номинал компенсационного резистора, выразив его из формулы (см. Проектирование датчиков для измерения механических величин. Под редакцией Е.П.Осадчего, 1979 г.)
Для определения температурных чувствительностей в крайних значениях температурного диапазона эксплуатации датчика рассчитаем в соответствии с (4) и (5) девиации выходных сигналов при нормальной температуре 20°С и температур
Δt+=+100°С и Δt-=-100°С.
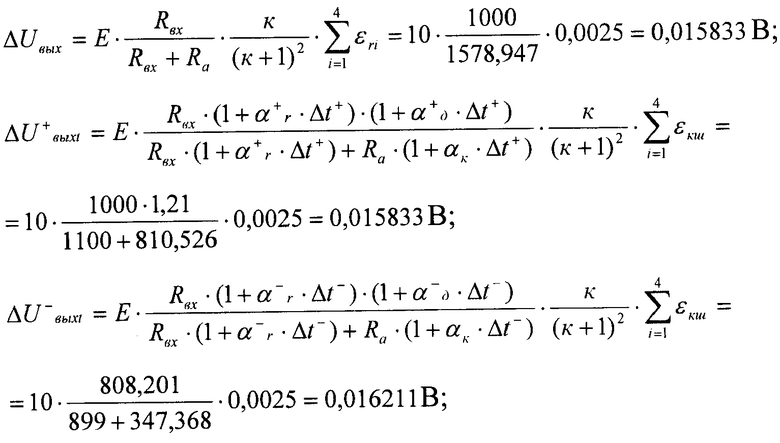
Тогда температурные чувствительности в крайних значениях температурного диапазона эксплуатации датчика [см. Теория, расчет и основы проектирования датчиков механических величин. В.А.Тихоненков, 2000 г.]


Результаты расчета показывают, что способ компенсации мультипликативной погрешности, приведенный в прототипе, дает достаточную точность компенсации только в температурном диапазоне, для которого производился расчет компенсационного резистора Rα (находится в пределах ±1·10-4 1/°С). При наличии нелинейности ТКЧ мостовой цепи, что характерно для всех видов тензорезисторов, температурная чувствительность в другой крайней точке температурного диапазона в 2 раза превышает допустимое значение.
Для рассмотрения влияния нелинейности общего ТКЧ мостовой цепи α∂о на дополнительные температурные погрешности необходимо оценить изменение α∂о с учетом знака при учете изменения параметров αr и α∂ при крайних значениях температурного диапазона эксплуатации датчика из выражения (7):
где  и
и  - соответственно ТКЧ мостовой цепи при крайней положительной t+ и отрицательной t- температуре;
- соответственно ТКЧ мостовой цепи при крайней положительной t+ и отрицательной t- температуре;
 и
и  - соответственно ТКЧ тензорезисторов и ТКС входного сопротивления датчика при крайней положительной температуре t+;
- соответственно ТКЧ тензорезисторов и ТКС входного сопротивления датчика при крайней положительной температуре t+;
 и
и  - соответственно ТКЧ тензорезисторов и ТКС входного сопротивления датчика при крайней отрицательной температуре t-.
- соответственно ТКЧ тензорезисторов и ТКС входного сопротивления датчика при крайней отрицательной температуре t-.
Так как αr имеет затухающий характер с ростом температуры, то примем  , а
, а  , где Δαr - нелинейность ТКС входного сопротивления от температуры. Так как α∂ имеет как возрастающий, так и убывающий характер с ростом температуры, то для случая, когда α∂ имеет возрастающий характер, примем
, где Δαr - нелинейность ТКС входного сопротивления от температуры. Так как α∂ имеет как возрастающий, так и убывающий характер с ростом температуры, то для случая, когда α∂ имеет возрастающий характер, примем  а
а  где Δα∂ - нелинейность ТКЧ тензорезисторов от температуры, а для случая когда α∂ имеет убывающий характер -
где Δα∂ - нелинейность ТКЧ тензорезисторов от температуры, а для случая когда α∂ имеет убывающий характер -  , а
, а  . Примем крайние значения рабочего температурного диапазона t+=120°С, a t-=-80°С (пределы изменения температуры Δt+=+100°С и Δt-=-100°С), тогда, изменяя значения всех параметров, входящих в последнее выражение, можно определить области существования общей нелинейности ТКЧ мостовой цепи при изменении температуры.
. Примем крайние значения рабочего температурного диапазона t+=120°С, a t-=-80°С (пределы изменения температуры Δt+=+100°С и Δt-=-100°С), тогда, изменяя значения всех параметров, входящих в последнее выражение, можно определить области существования общей нелинейности ТКЧ мостовой цепи при изменении температуры.
С целью обеспечения возможности подгонки чувствительности датчика к номинальному значению в процессе изготовления его чувствительность выполняют на 10-15% выше номинального значения, а подгонку чувствительности осуществляют включением в цепь питания добавочного резистора, номинал которого находится в пределах 50-200 Ом. Поэтому при расчете примем резистор Ri=100 Ом. Определим влияние αr и α∂ при Rвх=1000 Ом на общую нелинейность ТКЧ мостовой цепи при изменении температуры в диапазонах их воспроизводимых характеристик в процессе изготовления.
На Фиг.1 показаны зависимости общей нелинейности ТКЧ мостовой цепи от ТКЧ тензорезисторов при пяти значениях ТКС входного сопротивления мостовой цепи αr=(1, 3, 5, 8, 10)×10-4 1/°С в соответствии с выражением (8). При этом каждому значению ТКС мостовой цепи соответствует четыре реализации, каждая из которых соответствует одному из значений Δα∂=(-5; 0; 3; 5)×10-6 1/°С. Все реализации представляют собой прямые линии, которые располагаются слева направо по мере возрастания значений Δα∂.
Анализ полученных результатов показывает:
- с ростом ТКС входного сопротивления мостовой цепи общая нелинейность ТКЧ мостовой цепи смещается в отрицательную сторону, то есть становится затухающей, несмотря на возрастающий характер нелинейности ТКЧ тензорезисторов;
- для α∂=1,0·10-4 1/°С общая нелинейность ТКЧ мостовой цепи становится отрицательной во всем диапазоне изменения нелинейности ТКЧ тензорезисторов уже при значениях ТКС входного сопротивления мостовой цепи более αr=6·10-4 1/°С;
- общий ТКЧ мостовой цепи возрастает с ростом ТКС мостовой цепи и превышает ТКЧ тензорезисторов;
- при положительной общей нелинейности ТКЧ мостовой цепи значение нелинейности находится в пределах нелинейности ТКЧ тензорезисторов, а при отрицательной может превышать нелинейность ТКЧ тензорезисторов в несколько раз, то есть с ростом ТКС входного сопротивления мостовая цепь производит дополнительную раскомпенсацию ТКЧ тензорезисторов;
- при убывающем характере ТКЧ тензорезисторов общая нелинейность ТКЧ мостовой цепи всегда отрицательна, то есть с ростом температуры ТКЧ мостовой цепи будет иметь затухающий характер;
- с ростом ТКЧ тензорезисторов общая нелинейность ТКЧ мостовой цепи смещается в положительную сторону, то есть ТКЧ мостовой цепи становится более возрастающей;
- общая нелинейность ТКЧ мостовой цепи с ростом ТКЧ тензорезисторов возрастает и, начиная с α∂ +=2,0·10-4 1/°С, превышает нелинейность ТКЧ тензорезисторов;
- общий ТКЧ мостовой цепи (α+ ∂о) возрастает с ростом ТКЧ тензорезисторов, но не превышает его значения, то есть мостовая цепь сама частично компенсирует ТКЧ тензорезисторов;
- при одновременном увеличении ТКС входного сопротивления мостовой цепи и ТКЧ тензорезисторов происходит взаимная компенсация их влияния на общую нелинейность ТКЧ мостовой цепи;
- ТКЧ тензорезисторов оказывает большее влияние на общую температурную нелинейность ТКЧ мостовой цепи, чем ТКС входного сопротивления, и в результате при одинаковом возрастании αr и α∂ становится более положительной (возрастающей);
- если ТКС входного сопротивления мостовой цепи возрастает быстрее, чем ТКЧ тензорезисторов, то температурная нелинейность ТКЧ мостовой цепи становится отрицательной, то есть будет иметь затухающую характеристику.
В соответствии с рассмотренным примером существует две области общей нелинейности ТКЧ мостовой цепи:
- положительная, определяемая возрастающей нелинейностью ТКЧ мостовой цепи α∂о=(0,0-10,0)×10-4 1/°С, компенсация которой возможна за счет увеличения нелинейности ТКС входного сопротивления мостовой цепи;
- отрицательная, определяемая ТКС входного сопротивления, влияние которой на нелинейность ТКЧ мостовой цепи превышает влияние положительной нелинейности ТКЧ тензорезисторов, либо когда обе характеристики имеют затухающий характер α∂о=(0,0-20,0)×10-4 1/°С.
Т.о., метод компенсации мультипликативной температурной погрешности, изложенный в прототипе, хотя и позволяет значительно уменьшить эту погрешность, однако применим только в случаях с линейной температурной характеристикой выходного сигнала, что требует разработки способа компенсации мультипликативной погрешности с учетом нелинейности температурной характеристики выходного сигнала датчика (полной компенсации мультипликативной температурной погрешности).
Сущность изобретения заключается в следующем.
Задачей, на решение которой направлено заявляемое изобретение, является разработка способа настройки тензорезисторных датчиков с мостовой измерительной цепью по мультипликативной температурной погрешности, который позволил бы повысить точность компенсации мультипликативной температурной погрешности в процессе настройки.
Технический результат заключается в повышении точности в процессе настройки тензорезисторных датчиков с мостовой измерительной цепью по мультипликативной температурной погрешности.
Технический результат достигается тем, что для настройки тензорезисторных датчиков с мостовой измерительной цепью по мультипликативной температурной погрешности с учетом нелинейности температурной характеристики выходного сигнала датчика вычисляют номинал термозависимого резистора Rα для заданного ТКС αк из условия компенсации мультипликативной температурной погрешности, для чего определяют номинал Rвх и ТКС входного сопротивления мостовой цепи αr +, αr -, ТКЧ тензорезисторов α∂ +, α∂ - для положительного Δt+ и отрицательного Δt- температурных диапазонов. (Вычисляют нелинейность ТКЧ тензорезисторов (Δα∂=α∂ +-α∂ -) в температурном диапазоне от t+ до t-. Выбирают одну из схем компенсации по входным цепям Rα+Rш или Rα+R∂ исходя из нахождения величин αr +, α∂ + и Δα∂ в области существования полной компенсации мультипликативной температурной погрешности. В соответствии с выбранной схемой вычисляют номиналы компенсирующих элементов путем решения системы уравнений и устанавливают их во входную диагональ мостовой цепи. В случае нахождения αr +, α∂ + и Δα∂ вне области полной компенсации выбирают одну из схем компенсации Rα+Rш или Rα+R∂, установленных в выходную диагональ мостовой цепи, работающую на низкоомную нагрузку Rн≤2 кОм. Для этого определяют номинал выходного сопротивления мостовой цепи Rвых и его ТКС αr + и αr -, ТКЧ мостовой цепи α∂о +, α∂о - для двух температурных диапазонов Δt+ и Δt- при сопротивлении нагрузки Rн>500 кОм. Вычисляют нелинейность ТКЧ мостовой цепи (Δα∂о=α∂о +-α∂о -) в температурном диапазоне от t+ до t-. Выбирают одну из двух схем компенсации исходя из нахождения величин αr +, α∂ + и Δα∂ в области существования полной компенсации. В соответствии с выбранной схемой вычисляют номиналы компенсирующих элементов и устанавливают их в выходную диагональ мостовой цепи, работающую на низкоомную нагрузку Rн≤2 кОм.
Способ осуществляется следующим образом.
Для полной компенсации мультипликативной температурной погрешности применяют одну из четырех схем компенсации.
Схема 1. Термозависимый компенсационный резистор Rα, зашунтированный термонезависимым резистором R∂, устанавливается в цепь питания мостовой схемы. Общий ТКС такой цепочки может быть определен по формуле [см. Теория, расчет и основы проектирования датчиков механических величин. В.А.Тихоненков, 2000 г.]:

где αк - ТКС термозависимого сопротивления Rα.
Анализ этой формулы показывает, что общий ТКС такой цепочки имеет затухающий характер с ростом температуры и, следовательно, изменение общего сопротивления от температуры будет иметь отрицательную нелинейность. Тогда при постоянном Е источника питания напряжение питания мостовой цепи будет иметь возрастающий характер при увеличении температуры. При этом величина нелинейности напряжения питания будет определяться соотношением резисторов Rα и R∂. Таким образом, для компенсации мультипликативной температурной погрешности и ее нелинейности необходимо решить две задачи:
- для компенсации мультипликативной температурной погрешности датчика необходимо рассчитать номинал компенсационной цепи и ее ТКС из условия равенства общего ТКЧ мостовой цепи α∂о=0 в любом из выбранных температурных диапазонов (либо при Δt+, либо при Δt-);
- для компенсации нелинейности ТКЧ мостовой цепи необходимо также рассчитать номинал и ТКС компенсационной цепи из условия равенства общих ТКЧ мостовой цепи в плюсовом и минусовом температурных диапазонах.
Для расчета общего ТКЧ мостовой цепи воспользуемся выражением (6). Выходные сигналы датчика в выбранном температурном диапазоне с учетом включения компенсационных элементов будут иметь вид [см. Теория, расчет и основы проектирования датчиков механических величин. В.А.Тихоненков, 2000 г.]:

где  - номинал компенсационной цепи;
- номинал компенсационной цепи;
α∂ - ТКЧ мостовой цепи;
αr - ТКС входного сопротивления мостовой цепи;
αко - общий ТКС цепочки Rα+R∂.
Подставляя выражения (10) и (11) в формулу (6) и произведя несложные математические преобразования, получим выражение для расчета общего ТКЧ мостовой цепи в виде:

Тогда условием компенсации мультипликативной температурной погрешности выходного сигнала будет являться выражение:

при этом значения всех физических параметров может быть выбрано для любого (плюсового или минусового) температурного диапазона эксплуатации датчика. Условием компенсации нелинейности ТКЧ мостовой цепи будет являться выражение:

Для выявления условий полной компенсации мультипликативной температурной погрешности необходимо решить систему уравнений (13) и (14) относительно компенсационных элементов Rα и R∂, при которых происходит как компенсация нелинейности температурной характеристики выходного сигнала, так и компенсация мультипликативной температурной погрешности во всем температурном диапазоне эксплуатации.
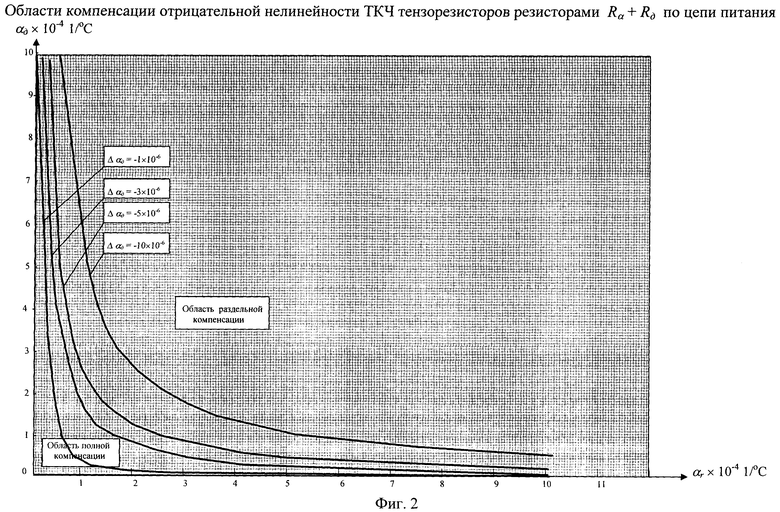
Расчет проводился для ТКС входного сопротивления αr от 0 до 10·10-4 1/°C; ТКЧ тензорезисторов α∂ от 0 до 10·10-4 1/°С; при отрицательной нелинейности ТКС входного сопротивления Δαr=-0,05·10-4 1/°С и изменении нелинейности от Δα∂ от
-0,01·10-4 1/°С до -0,1·10-4 1/°С.
В результате получили следующие данные:
- в области положительных значений нелинейности ТКЧ тензорезисторов полная компенсация рассматриваемой схемой компенсации невозможна;
- в области отрицательных значений нелинейности ТКЧ тензорезисторов полная компенсация рассматриваемой схемой возможна с ограничениями.
На Фиг.2 представлены кривые, определяющие границы полной компенсации температурных погрешностей и раздельной компенсации для существующих в реальной практике температурных характеристик тензорезисторных датчиков. Справа от полученных кривых находится зона раздельной компенсации температурных характеристик, то есть в этой области рассматриваемая компенсационная цепь может использоваться отдельно, как для компенсации нелинейности ТКЧ мостовой цепи без компенсации температурной погрешности. В Табл.1 представлены области существования полной компенсации мультипликативной температурной погрешности.
Если параметры датчика не соответствуют области существования полной компенсации мультипликативной температурной погрешности, применяют схему 2.
Схема 2. Термозависимый компенсационный резистор Rα и термонезависимый резистор Rш, шунтирующий входное сопротивление мостовой цепи, устанавливаются в цепь питания мостовой схемы. Для определения области применения этого способа компенсации необходимо вывести аналитические выражения условий компенсации как самой мультипликативной температурной погрешности, так и ее нелинейности. Для расчета общего ТКЧ мостовой цепи воспользуемся выражением (6), тогда выходные сигналы датчика в режиме холостого хода в выбранном температурном диапазоне с учетом включения компенсационных элементов будут иметь вид:

где  - общее входное сопротивление мостовой цепи при использовании шунтирующего резистора;
- общее входное сопротивление мостовой цепи при использовании шунтирующего резистора;
 - ТКС общего входного сопротивления мостовой цепи;
- ТКС общего входного сопротивления мостовой цепи;
где α∂ - ТКЧ мостовой цепи;
αr - ТКС входного сопротивления мостовой цепи;
αк - ТКС термозависимого сопротивления Rα.
Подставляя выражения (16) и (17) в формулу (6) и произведя несложные математические преобразования, получим выражение для расчета общего ТКЧ мостовой цепи в виде:

Тогда условием компенсации мультипликативной температурной погрешности выходного сигнала будет являться равенство нулю ТКЧ мостовой цепи α∂о=0, то есть

при этом значения всех физических параметров могут быть выбраны для любого (плюсового или минусового) температурного диапазона эксплуатации датчика.
Условием компенсации нелинейности ТКЧ мостовой цепи будет являться выражение
где  - ТКС входного сопротивления датчика при крайней положительной t+ и отрицательной t- температурах.
- ТКС входного сопротивления датчика при крайней положительной t+ и отрицательной t- температурах.
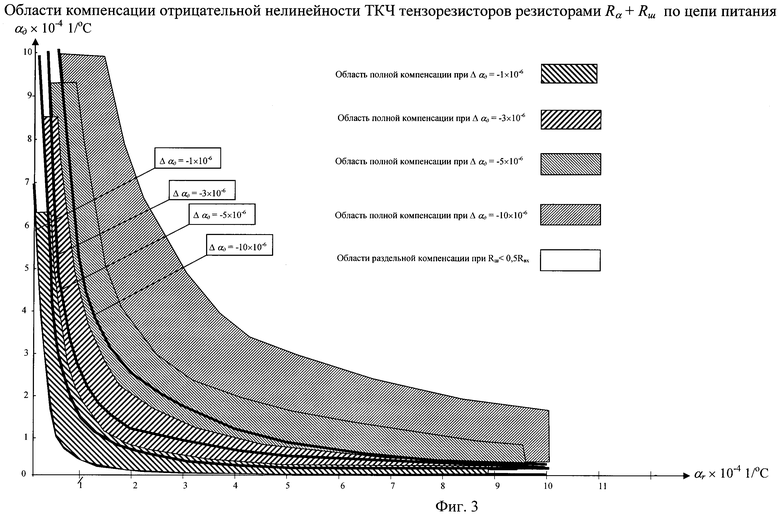
Для выявления областей полной компенсации мультипликативной температурной погрешности рассматриваемой схемой проведем расчет системы уравнений (12) и (13) относительно компенсационных элементов Rα и Rш по ранее рассмотренным параметрам схемы
В результате получили следующие данные:
- в области положительных значений нелинейности ТКЧ тензорезисторов полная компенсация рассматриваемой схемой компенсации невозможна;
- в области отрицательных значений нелинейности ТКЧ тензорезисторов полная компенсация рассматриваемой схемой возможна с ограничениями.
На Фиг.3 представлены кривые, определяющие границы полной компенсации температурных погрешностей и раздельной компенсации для существующих в реальной практике температурных характеристик тензорезисторных датчиков. Справа от полученных кривых находится область полной компенсации мультипликативной температурной погрешности, ограниченная сверху из-за значительного уменьшения чувствительности мостовой цепи при шунтировании входного сопротивления. В Табл.2 представлены области существования полной компенсации мультипликативной температурной погрешности.
Если параметры датчика не соответствуют области существования полной компенсации мультипликативной температурной погрешности для схемы 2, применяют схему 3.
Схема 3. Термозависимый резистор Rα и установленный параллельно ему термонезависимый резистор R∂ устанавливают в выходную диагональ мостовой цепи, работающей на сопротивление нагрузки Rн≤2 кОм. Выходное напряжение датчика на сопротивлении нагрузки при включении в выходную диагональ мостовой цепи термозависимого резистора Rα будет иметь вид [см. Теория, расчет и основы проектирования датчиков механических величин. В.А.Тихоненков, 2000 г.]:

где Uxx - выходное напряжение мостовой схемы в режиме холостого хода (на сопротивлении нагрузки Rн>500 кОм);
Rн - сопротивление нагрузки (входное сопротивление нормирующего преобразователя);
Rвых - выходное сопротивление мостовой цепи;
При включении параллельно Rα термонезависимого резистора R∂ и установке их в выходную диагональ мостовой цепи выражение (22) примет вид:

При воздействии температуры на рассматриваемую схему при условии, что сопротивление нагрузки термонезависимо, выражение (23) примет вид:

где α∂о - ТКЧ мостовой цепи, определяемое по (6) при Rн>500 кОм;
αr - ТКС выходного сопротивления мостовой цепи;
αк - ТКС термозависимого сопротивления Rα.
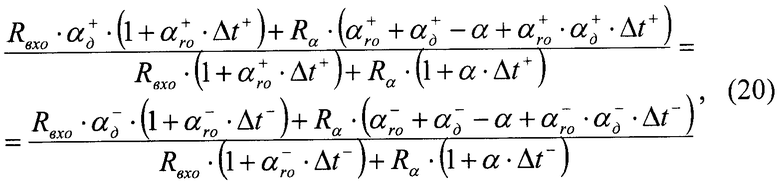
Тогда ТКЧ мостовой цепи, работающей на сопротивление нагрузки Rн≤2 кОм (ТКЧ датчика), в соответствии с (6) будет иметь вид:

Условием компенсации мультипликативной температурной погрешности будет являться равенство нулю ТКЧ датчика на нагрузке α∂н=0, то есть

Условием компенсации нелинейности температурной характеристики выходного сигнала датчика будет являться равенство ТКЧ датчика на нагрузке при крайних значениях температурного диапазона эксплуатации датчика  , то есть
, то есть

Для полной компенсации мультипликативной температурной погрешности датчика расчет величин компенсационных резисторов Rα и R∂ необходимо проводить путем решения системы уравнений (26) и (27):
Для обеспечения эффективности работы компенсационного резистора Rα, установленного в выходную диагональ мостовой цепи, величина сопротивления нагрузки Rн не должна превышать величины 2·Rвых, т.к увеличение Rн>2·Rвых потребует применения Rα величиной в десятки кОм, что приведет к значительному падению чувствительности датчика.
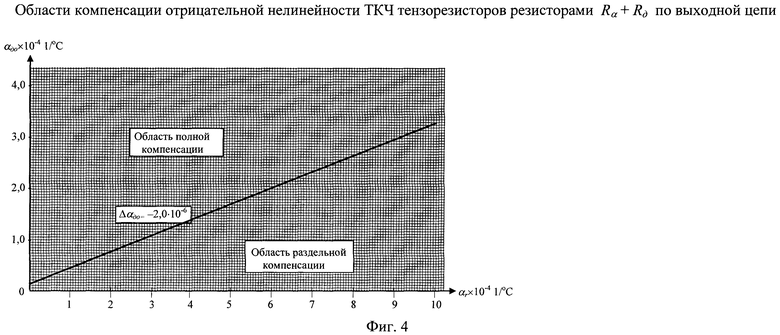
Для определения областей полной компенсации мультипликативной температурной погрешности датчика рассматриваемой схемой проведем расчет величин компенсационных резисторов Rα и R∂ путем решения системы уравнений (28) для параметров схемы, рассмотренной в предыдущем примере
Анализ результатов расчета позволяет сделать следующие выводы.
Область существования полной компенсации может быть ограничена значениями ТКЧ мостовой цепи α∂о>0,325·αr+0,05·10-4, 1/°С, при значении нелинейности ТКЧ мостовой цепи Δα∂о≤-2,0·10-6 1/°С (см. Фиг.4).
Если параметры датчика не соответствуют области существования полной компенсации мультипликативной температурной погрешности для схемы 3, применяют схему 4.
Схема 4. Термозависимый резистор Ra и термонезависимый резистор Rш устанавливают в выходную диагональ мостовой цепи, работающей на сопротивление нагрузки Rн≤2 кОм. Выражение для выходного напряжения датчика на сопротивлении нагрузки (22) при включении в выходную диагональ мостовой цепи термозависимого резистора Rα и термонезависимого резистора Rш будет иметь вид:

При воздействии температуры на рассматриваемую схему при условии, что сопротивление нагрузки термонезависимо, выражение (29) примет вид:

Тогда ТКЧ мостовой цепи, работающей на сопротивление нагрузки Rн≤2 кОм (ТКЧ датчика) в соответствии с (6), будет иметь вид:

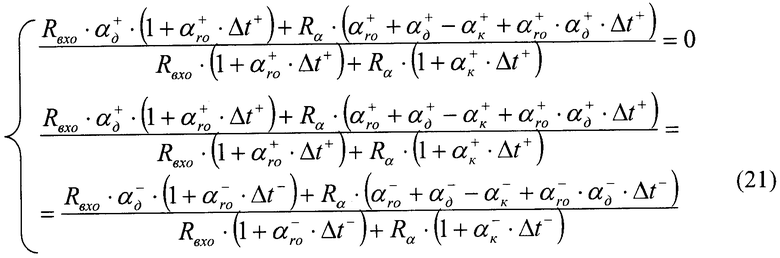
Условием компенсации мультипликативной погрешности будет являться равенство нулю ТКЧ датчика на нагрузке α∂н=0, то есть

Условием компенсации нелинейности температурной характеристики выходного сигнала датчика будет являться равенство ТКЧ датчика на нагрузке при крайних значениях температурного диапазона эксплуатации датчика  , то есть
, то есть

Для полной компенсации нелинейности температурной характеристики выходного сигнала и температурной погрешности датчика расчет величин компенсационных резисторов Rα и Rш необходимо проводить путем решения системы уравнений (32) и (33):
Для определения областей применения рассматриваемой схемы компенсации для полной компенсации нелинейности температурной характеристики выходного сигнала и температурной погрешности датчика проведем расчет величин компенсационных резисторов Rα и Rш путем решения системы уравнений (34) для параметров схемы, рассмотренной в предыдущем примере.
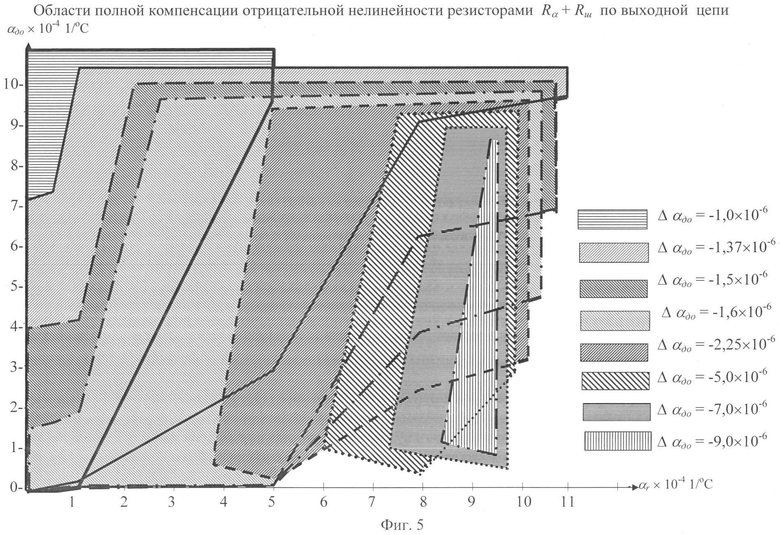
Графическое изображение зон полной компенсации рассматриваемой схемой по результатам приведенных расчетов представлено на Фиг.5. В Табл.3 представлены области существования полной компенсации мультипликативной температурной погрешности.
αr +·10-4, 1/°С
Δα∂о·10-4, 1/°С
α∂o +·10-4, 1/°C
Таким образом, использование схем компенсации по входным цепям питания в сочетании со схемами компенсации по выходным цепям позволяет осуществить полную компенсацию мультипликативной температурной погрешности с учетом ее нелинейности со следующими ограничениями:
1. Полную компенсацию мультипликативной температурной погрешности в положительной зоне нелинейности рассмотренными схемами компенсации осуществить невозможно.
2. Полную компенсацию мультипликативной температурной погрешности в отрицательной зоне нелинейности рассмотренными схемами компенсации для больших значений сопротивления нагрузки (Rн>500 кОм) можно осуществить при выполнении следующих рекомендаций:
2.1. С помощью схемы 1, состоящей из термозависимого резистора Rα, зашунтированного термонезависимым резистором R∂, при установке схемы в цепь питания моста, работающего на нагрузку Rн>500 кОм, полная компенсация осуществляется при изменении αr=(0,0-0,8)·10-4 1/°С для α∂o=(0,0-10,0)·10-4 1/°С, и при изменении αr=(0,8-10,0)·10-4 1/°С ТКЧ мостовой цепи изменяется по обратно пропорциональной зависимости от α∂о=10,0·10-4 1/°С до α∂о=1,0·10-4 1/°С.
2.2. С помощью схемы 2, состоящей из термозависимого резистора Rα, установленного в цепь питания моста, и термонезависимого шунта Rш, установленного параллельно входному сопротивлению моста, работающего на нагрузку Rн>500 кОм, полная компенсация осуществляется в зоне:
- зона некомпенсации при αr=(0,0-6,0)·10-4 1/°С для ТКЧ мостовой цепи, изменяющейся по обратно пропорциональной зависимости от α∂о=7,0·10-4 1/°С до α∂о=0,0·10-4 1/°С, которая полностью перекрывается первой компенсационной схемой (см. пункт 2.1);
- зона компенсации начинается от зоны некомпенсации и продолжается до значений αr=(2,0-6,0)·10-4 1/°С при изменении ТКЧ мостовой цепи по обратно пропорциональной зависимости от α∂о=10,0·10-4 1/°С до α∂о=2,0·10-4 1/°С и ограничена сверху из-за значительного уменьшения чувствительности мостовой цепи при шунтировании входного сопротивления.
2.3. С помощью схемы 3, состоящей из термозависимого резистора Rα, зашунтированного термонезависимым резистором R∂, при установке схемы компенсации в выходную цепь моста при сопротивлении нагрузки Rн≤2 кОм достигается полная компенсация в оставшейся зоне после использования второй схемы за исключением небольшой зоны, ограниченной αr=(2,0-6,0)·10-4 1/°С при изменении ТКЧ мостовой цепи от α∂о=2,0·10-4 1/°С до α∂о=3,3·10-4 1/°С. Указанная зона некомпенсации может быть определена графически при наложении зон компенсации второй и четвертой схем компенсации (см. Фиг.3 и Фиг.4).
2.4. Оставшаяся зона некомпенсации перекрывается использованием схемы 4, состоящей из термозависимого резистора Rα, установленного в выходной цепи, и шунтирующего сопротивления Rш, установленного параллельно выходному сопротивлению мостовой схемы при сопротивлении нагрузки, равной Rн≤2 кОм (см. Фиг.5 для указанной зоны некомпенсации).
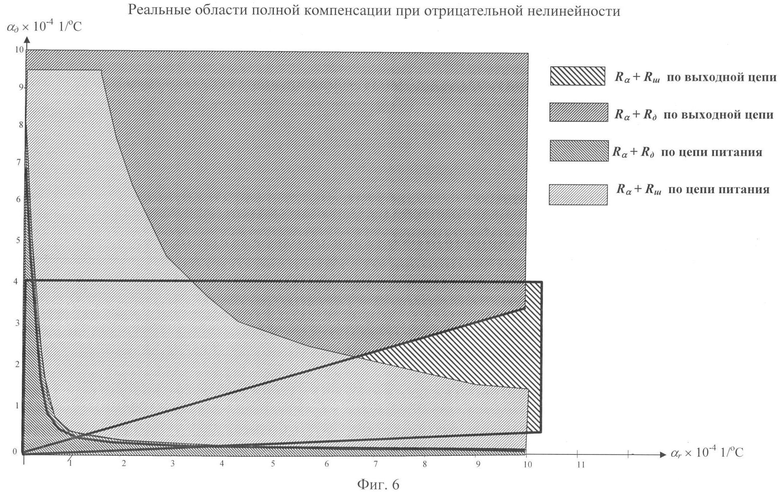
На Фиг.6 представлены реальные области компенсации мультипликативной температурной погрешности с учетом отрицательной нелинейности температурной характеристики выходного сигнала датчика для рассмотренных схем, откуда видно, что использование рассмотренных способов полной компенсации мультипликативной температурной погрешностью полностью перекрывает всю область реального существования этих погрешностей.
Рассмотрим пример компенсации для подтверждения возможности полной компенсации мультипликативной температурной погрешности предложенным способом.
Пример
Произвести компенсацию мультипликативной температурной погрешности с учетом нелинейности температурной характеристики выходного сигнала тензорезисторного датчика с равноплечей мостовой измерительной цепью, имеющей характеристики в соответствии с раннее рассмотренным примером, отличающейся только параметрами ТКС и ТКЧ мостовой цепи:
- ТКС выходного сопротивления мостовой цепи αr +=8,0·10-4 1/°С;
- ТКЧ мостовой цепи α∂о=1,5·10-4 1/°С;
- нелинейность ТКЧ мостовой цепи Δα∂о=-5,0·10-6 1/°С.
Решение
Значения αr +, α∂о + и Δα∂о не удовлетворяют условиям полной компенсации для схемы 1 и 2 (см. Табл. 1 и 2). Схема 3 также не обеспечивает полной компенсации, т.к. не выполняется условие:

Значения αr +, α∂о + и Δα∂о удовлетворяют только условиям для схемы 4 (см. Табл.3), следовательно, они обеспечивают полную компенсацию мультипликативной температурной погрешности.
Считаем, что мостовая цепь сбалансирована, т.к. сопротивления всех плеч равны. Тогда решая систему уравнений (34), можно определить номиналы компенсационных элементов Rα и Rш:
Действительными корнями решения системы уравнений являются
Rα=64,3222 Ом и Rш=608,7311 Ом.
Для оценки точности полной компенсации мультипликативной температурной погрешности рассматриваемой схемой необходимо в соответствии с уравнениями (29) и (30) рассчитать выходные сигналы датчика на нагрузке при нормальной температуре и крайних температурах рабочего диапазона эксплуатации датчика:
- при нормальной температуре 20°С
 ;
;
- при температуре 120°С
 ;
;
- при температуре -80°С
 .
.
Температурные чувствительности датчика в разных температурных диапазонах могут быть определены как:
- в положительном диапазоне температур Δt+=100°С
 ;
;
- в отрицательном диапазоне температур Δt-=-100°С
 .
.
Таким образом, точность компенсации мультипликативной температурной погрешности не превышает 2,5·10-4%, а точность компенсации температурной нелинейности выходного сигнала

не превышает 3,5·10-4% от предельно допустимого значения температурной чувствительности (Sкt∂оп=1·10-4 1/°С). Предлагаемый способ полной компенсации мультипликативной температурной погрешности показал высокую точность компенсации, которая зависит только от точности изготовления компенсационных резисторов и точности определения физических характеристик тензорезисторов.
Приложение
αr +·10-4, 1/°C
Δα∂·10-6, 1/°C
Если определенные αr +, α∂ + и Δα∂ удовлетворяют указанным условиям для какой-либо из двух схем, то для выбранной схемы рассчитывают номиналы компенсационных элементов путем решения системы уравнений для соответствующей схемы (см. Табл.3) и производят установку расчетных значений соответствующих компенсационных элементов во входную диагональ мостовой цепи, в противном случае определяют номинал выходного сопротивления мостовой цепи Rвых и его ТКС αr + и αr - для двух температурных диапазонов - Δt+ и Δt-, определяют выходные напряжения U+ выхt, U- выхt, Uвых при сопротивлении нагрузки Rн>500 кОм для крайних точек и нормальной температуры рабочего температурного диапазона датчика соответственно, рассчитывают ТКЧ мостовой цепи α∂о +, α∂о - по формуле:
и нелинейность ТКЧ мостовой цепи (Δα∂о=α∂о +-α∂о -) в температурном диапазоне от t+ до t-, выявляют нахождение αr +, α∂о + и Δαдо в области существования полной компенсации мультипликативной температурной погрешности для схемы 3 в соответствии с системой уравнений:

а для схемы 4 в соответствии с Табл. 2
αк +·10-4, 1/°С
Δα∂о·10-4, 1/°С
α∂о +·10-4, 1/°С
Если определенные αr +, α∂о + и Δα∂о удовлетворяют условиям для какой-либо из двух схем, то для выбранной схемы рассчитывают номиналы компенсационных элементов путем решения системы уравнений для соответствующей схемы (см. Табл.3) и производят установку расчетных значений соответствующих компенсационных элементов в выходную диагональ мостовой цепи, работающую на низкоомную нагрузку Rн≤2 кОм.

Изобретение относится к измерительной технике. Способ заключается в определении номинала термозависимого резистора Rα и номинала термонезависимого резистора Rш, шунтирующего входное сопротивление мостовой цепи. При этом резисторы Rα и Rш устанавливают в выходную диагональ мостовой цепи, работающей на сопротивление нагрузки Rн≤2 кОм. Определяют номинал выходного сопротивления мостовой цепи Rвых и его ТКС αr + и αr - для двух температурных диапазонов, Δt+=t+-to и Δt-=t--to, где to, t+, t- - соответственно нормальная температура и крайние точки температур рабочего температурного диапазона датчика, определяют выходные напряжения U+ выхt, U- выхt, Uвых при сопротивлении нагрузки Rн>500 кОм для крайних точек и нормальной температуры рабочего температурного диапазона датчика соответственно, рассчитывают ТКЧ мостовой цепи α∂о +, α∂о - по формуле:  и нелинейность ТКЧ мостовой цепи (Δα∂о=α∂о +-α∂о -) в температурном диапазоне от t+ до t-, выявляют нахождение αr +, αдо + и Δαдо в области существования полной компенсации. И если определенные αr +, αдо + и Δαдо находятся в указанной области, то определяют номиналы термозависимого Rα и термонезависимого резистора Rш путем решения соответствующей системы уравнений. Технический результат заключается в повышении точности настройки тензорезисторных датчиков. 6 ил., 6 табл.
и нелинейность ТКЧ мостовой цепи (Δα∂о=α∂о +-α∂о -) в температурном диапазоне от t+ до t-, выявляют нахождение αr +, αдо + и Δαдо в области существования полной компенсации. И если определенные αr +, αдо + и Δαдо находятся в указанной области, то определяют номиналы термозависимого Rα и термонезависимого резистора Rш путем решения соответствующей системы уравнений. Технический результат заключается в повышении точности настройки тензорезисторных датчиков. 6 ил., 6 табл.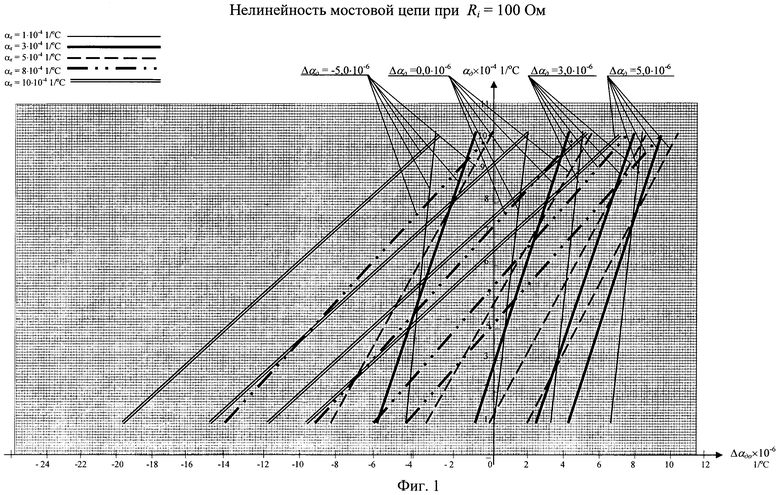
Способ настройки тензорезисторных датчиков с мостовой измерительной цепью по мультипликативной температурной погрешности с учетом нелинейности температурной характеристики выходного сигнала датчика, заключающийся в определении номинала термозависимого резистора Rα, для заданного ТКС αк и номинала термонезависимого резистора Rш, шунтирующего входное сопротивление мостовой цепи, из условия компенсации мультипликативной температурной погрешности, отличающийся тем, что резисторы Rα и Rш устанавливают в выходную диагональ мостовой цепи, работающей на сопротивление нагрузки Rн≤2 кОм, для чего определяют номинал выходного сопротивления мостовой цепи Rвых и его ТКС αr + и αr - для двух температурных диапазонов, Δt+=t+-to и Δt-=t--to, где to, t+, t- - соответственно нормальная температура и крайние точки температур рабочего температурного диапазона датчика, определяют выходные напряжения U+ выхt, U- выхt, Uвых при сопротивлении нагрузки Rн>500 кОм, для крайних точек и нормальной температуры рабочего температурного диапазона датчика соответственно, рассчитывают ТКЧ мостовой цепи α∂о +, α∂о - по формуле:  и нелинейность ТКЧ мостовой цепи (Δα∂о=α∂о +-α∂о -) в температурном диапазоне от t+ до t-, выявляют нахождение αr +, α∂o + и Δα∂o в области существования полной компенсации в соответствии с таблицей:
и нелинейность ТКЧ мостовой цепи (Δα∂о=α∂о +-α∂о -) в температурном диапазоне от t+ до t-, выявляют нахождение αr +, α∂o + и Δα∂o в области существования полной компенсации в соответствии с таблицей:
-0,05…-0,2
>0
и если определенные αr +, α∂о + и Δα∂о находятся в указанной области, то определяют номиналы термозависимого Rα и термонезависимого резистора Rш путем решения системы уравнений:
 производят установку расчетных значений термозависимого резистора Rα и термонезависимого резистора Rш в выходную диагональ мостовой цепи, работающую на низкоомную нагрузку Rн≤2 кОм.
производят установку расчетных значений термозависимого резистора Rα и термонезависимого резистора Rш в выходную диагональ мостовой цепи, работающую на низкоомную нагрузку Rн≤2 кОм.
| КОСВЕННЫЙ СПОСОБ НАСТРОЙКИ ТЕНЗОРЕЗИСТОРНЫХ ДАТЧИКОВ С МОСТОВОЙ ИЗМЕРИТЕЛЬНОЙ ЦЕПЬЮ ПО МУЛЬТИПЛИКАТИВНОЙ ТЕМПЕРАТУРНОЙ ПОГРЕШНОСТИ | 2006 |
|
RU2302611C1 |
| Способ настройки тензометрических мостов | 1990 |
|
SU1758563A1 |
| US 4172389 A, 30.10.1979 | |||
| СПОСОБ ТЕМПЕРАТУРНОЙ НАСТРОЙКИ ТЕНЗОРЕЗИСТОРНОГО ДАТЧИКА ДАВЛЕНИЯ С МОСТОВОЙ ИЗМЕРИТЕЛЬНОЙ ЦЕПЬЮ | 2004 |
|
RU2259537C1 |

