ГГ
СП
ьо
tNd
ю
Изоберетние относится к автоматике, и может быть применено при-лост роении автоматизированнь х .систем управления объектами различного наз- наченияр промышленными работами и роботизированными комплексами, а также для измерения параметров объектов, не поддающихая непосредственному измерению, например температуры двига- теля о
Цель изобретения - повыше ше точности из м ер е, ния ,
На чертеже.показано предлагаемое устройство, .-
Устройство содержит датчики температуры 1 двигателяJ оборотов 2 двигателя,, плотности 3 воздушного потока, формирователь 4 производной сигнала тем- пературы5 коммз татор 5,, аналого цифровой преобразователь б, блок 7 управления, состоящий из генератора 8, счетчика 9 и кольцевого счетчика lOj узел 11 conpHKeHi-iH5 регистры 12-15, сумматор 165 вычислитель 17 поправ- ки, состоящий из функционального преобразователя 8 и умножителя 195 к индикатор 20, .
Датчики 1-3 подключены к соо тветст- вуюизкм входам коммутатора 5; Датчик 1 подключен дополнительно через формирователь 4 производной к соответствую щему входу коммутатора 5 у выходы последнего подключены через узел 11 сопряжения (операционный повторитель; к входам АЦП 6, выходы которого под- ключеиы к информационньп-i входам регкс ров 12-15 в Выходы periiCTpoB 14 и 15 могут быть подключены к соответствую щим индикаторам и входам функциональ- ного преобразователя 18 вычислителя 17 поправки. Выход регистра 13 подключен к входу умножителя 19 вычисли- теля. 17 5 выход умножителя - к первоьгу входу сумматора 16j другой вход кото- рого подключен к выходу регистра IZ-j выход - к ндцикатору 20, Управляккц.ие входы коммутатора-5 и рег-истров 12-15 сое,цинень с соответствующими выходами
кольцевого счетчика 10 блока 7, Управ
ляющие входы сумматора 16, вычислителя 17 и AU.n б соединены с соответствущими выxoдa Fл счетчика, 9 блока 7а
Блок 7 предназначен для выдачи уп- равля10 1у5х сигналов в виде импульсов на блоки 5 5 6 ., . 1 2-1 7 ,,
Вычислитель 17 предназначен для выдачи сигнала гсоррекции ДТ но темпе ратуре с учетом производной сигнала
с
5
05
Q д
5
SO
5
температуры и постоянной времени, т.е, вырабатывает сигнал в цифровой форме с учетом инерционности термопа- )ры и показаний ее от оборотов двигателя и плотности воздушного потока, и состоит из цифрового функционального преобразователя, построенного на базе ПЗУ, и умножителя и реализует зависимость
4Т а-Гт ,
где С - скорректированное значение постоянной времените;
т - значение производной сигнала температуры, C/cj
а - коэффициент,
J Постоянная времени сигнала температуры зависит от скорости и плотнос- .ти воздушного потока. Скорость воздушного потока пропорциональна оборОТОВв
В общем виде (njp),
Увеличение числа оборотов п и повышение плотности потока р приводит к уменьшению постоянной времени, Опре- , деляется эта зависимость экспериментально и вводится либо табличным путем, дибо графически.
Цифровой умножитель производит умножение сигнала постоянной времени на сигнал производной.
Устройство работает следующим образом.
Сигнал о температуре с датчика 1 и усилителя (не показан) с формирователя 4 и с д атчиков 2 и 3 после усиления поступает на соответствугацие входы ког-мутатора 5 Последний представляет собой управляемые ключи, включаемые по импульсным сигналамJ поступающим с кольцевого счетчика 10,
Усиленные узлом 11 сигналы поступают на вход аналого-цифрового преобразователя б (АЦП), где преобразуют- ся в цифрову:.о форму j и далее - на регистры 12-15. где запоминаются.
Сигналы регистров 14 и 15 поступают на функциональный преобразователь 18 вычислителя 17 который производит определение функции (njp). Сигналы il. f(njp) ;И сигнал с регистра 13 (сигнала производной температуры) поступают в умножитель 19, вычисляющий поправку uT afT i
Сигнал ЛТ к сигнал о тем;пературе T-f-fi с регистра 12 поступают в сумматор 16, который по сигналу со счетчика 9 блока 7 производит выдачу скорректированного сигнала температуры истин индикатор 20.
Таким образом, по сравнению с прототипом повышена достоверность измерения сигнала температуры за счет введения поправки, учитывакщей влияние ряда факторов на показания датчика температуры.
Формула изобретения
Устройство для измерения температуры двигателя, содержащее коммутатор блок управления, аналого-цифровой преобразователь, выход которого соединен с информационными входами первого, второго-и третьего регистров, входы синхронизации которых соединены с первым выходом блока управления, второй и третий выходы которого соединены с управляющим входом коммутатора и входом синхронизации аналого-цифрового преобразователя соответственно, первый, второй и третий информационные входы коммутатора являются соответственно входами значения температуры двигателя, оборотов двигателя и плотности воздушного потока устройст- ва, о тличающееся тем, что,
0
5 0 5 0
с целью повышения точности измерения, в него введены формирователь производной сигнала температуры, четвертый регистр, сумматор и вычислитель поправки, причем выход коммутатора соединен с информационным входом аналого- цифрового преобразователя, первый выход блока управления соединен с входом синхронизации четвертого регистра, выход которого соединен с первым . информационным входом,сумматора, второй информационный вход которого соединен с выходом значения вычислителя поправки, первый, второй и третий информационные входы вычислителя поправки соединены с выходами первого, второго и третьего регистров, причем- четвертый и пятый выходы блока управления соединение входами синхронизации сумматора и вычислителя поправки соответственно, выход cyMMafopa яв- . ляется информационным выходом устройства, выход аналого-цифрового пр еоб- разователя соединен с информационным входом четвертого регистра, вход значения температуры двигателя устройства соединен через формирователь производной сигнала температуры с четвертым информационным входом коммутато- ;ра.
| название | год | авторы | номер документа |
|---|---|---|---|
| БЫСТРОДЕЙСТВУЮЩИЙ МНОГОФУНКЦИОНАЛЬНЫЙ ПРЕОБРАЗОВАТЕЛЬ УГЛА В КОД ДЛЯ УСТРОЙСТВ ЭЛЕКТРОМЕХАНОТРОНИКИ | 1994 |
|
RU2094945C1 |
| Устройство для контроля и управления технологическим процессом тренировки и испытаний фотоэлектронных умножителей | 1986 |
|
SU1325516A1 |
| Способ анализа спектра сигналов и устройство для его осуществления | 1988 |
|
SU1573432A1 |
| Устройство для записи и воспроизведения видеоинформации | 1987 |
|
SU1527663A1 |
| СПОСОБ РЕГУЛИРОВАНИЯ ЖИДКОСТНОГО РАКЕТНОГО ДВИГАТЕЛЯ И УСТРОЙСТВА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1993 |
|
RU2085755C1 |
| Устройство для контроля дисков блоков памяти | 1980 |
|
SU942161A1 |
| УСТРОЙСТВО ДЛЯ РЕГУЛИРОВАНИЯ ДАВЛЕНИЯ | 1992 |
|
RU2072548C1 |
| Устройство для учета ресурса транспортных машин | 1987 |
|
SU1453394A1 |
| Устройство контроля состояния объектов | 1985 |
|
SU1366993A1 |
| Устройство для контроля и управления технологическими процессами испытаний и тренировки фотоэлектронных умножителей | 1988 |
|
SU1517041A1 |
Изобретение относится к автоматике. Цель изобретения - повышение точности измерения-обеспечивается путем введения в сигнал температуры, определяемой в цифровом виде регистром 12, поправки, вычисляемой по показаниям формирователя 4 производной сигнала температуры и датчиков 2 и 3 оборотов и плотности. Вычисление в цифровой форме поправки ΔТ = ART1 производит вычислитель 17 поправки, сигналы на который поступают с АЦП 6 через регистры 13-15, а полный сигнал о температуре выдает сумматор 16. Устройство также содержит датчик 1 температуры, коммутатор 5, генератор 8, счетчик 9, кольцевой счетчик 10, узел 11 сопряжения, регистр 12, функциональный преобразователь 18, умножитель 19, индикатор 20, блок 7 управления. 1 ил.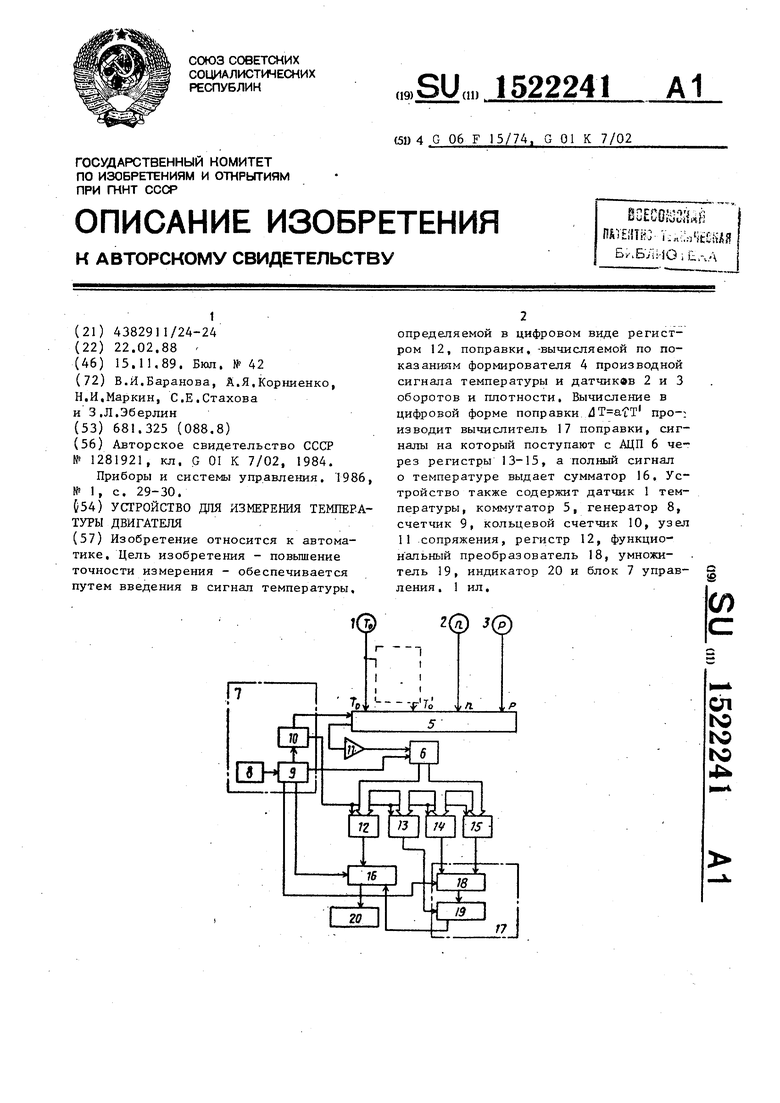
| Устройство для измерения температуры | 1984 |
|
SU1281921A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Приборы и системы управления | |||
| Пневматический водоподъемный аппарат-двигатель | 1917 |
|
SU1986A1 |
| Солесос | 1922 |
|
SU29A1 |
| Видоизменение прибора для получения стереоскопических впечатлений от двух изображений различного масштаба | 1919 |
|
SU54A1 |
