Цель изобретения - упрощение обслуживания и сокращение времени монтажа путем обеспечения дистанционного перевода блока перемещения из транспортного положения а рабочее и обратно.
На фиг.1 изображен ядерный реактор, общий вид; на фиг,2 - верхняя часть привода регулирующего органа ядерн&го реактора (блок перемещения в нижнем положении); на фиг.З - нижняя часть привода регулирующего органа ядерного реактора (блок перемещения в нижнем положении); на фиг.4 - взаимное расположение втулок с выступами в исходном положении до начала сцепления якоря электродвигателя с блоком перемощения (развертка по окружности); на фиг,5 -.то же, при включенном дополнительном электромагните; на фиг.б-тоже, после обесточива- ния дополнительного электромагнита, когда якорь электродвигателя сцеплен с блоком перемещения; на фиг,7 - то ко, блок перемещения поднят якорем в верхнее положение; на фиг.З - аксонометрия втулок с наружными выступами; .на фиг.9 - аксонометрия втулки с внутренними нижними выступами; на фиг,10 - аксонометрия втулок.с верхними выступами; на фиг,11 - сечение А-А на фиг.2, поперечное сечение взаимного расположения втулок с выступами в исходном положении; на фиг,12-сечение Б-Б на фиг.11; на фиг, 13 - сечение В-В на фиг.2; на фиг.14 - сечение Г-Г на фиг,2; на фиг.15 сечение Д-Д на фиг.2; на фиг, 16 - верхняя часть привода регулирующего органа ядер- ного реактора в транспортном положении; нафиг,17- нижняя часть привода регулирующего органа ядерного реактора в транспортном положении.
На крышке 1 ядерного реактора 2 установлены приводы 3 регулирующих органов 4, Крыщка 1 с установленными на ней приводами регулирующего органа ядерного реактора образует верхний блок 5 ядерного реактора 2, Внутри ядерного реактора 2 размещена активная зона 6, на которую ус- тановлен блок защитных труб 7. Регулирующие органы 4 соединены с приводами регулирующих органов ядерного реактора 3 при помощи штанг 8.
Привод регулирующего органа ядерного реактора 3 имеет чехол 9, на внутренней поверхности которого выполнен бурт 10, Снаружи чехла 9 расположен блок .электромагнитов 11, включающий электромагнит
12,управляющий неподвижным захватом
13,электромагнит 14, управляющий подвижным захватом 15, дополнительный электромагнит 16, управляющий механизмом 17, обеспечивающим перевод блока перемещения 18 (часть описываемого привода, скомпонованная единым агрегатом и размещенная внутри чехла 9) в транспортное положение, электромагниты 19 линейного шагового двигателя 20. Внутри чехла 9 расположена жестко связанная с ним труба 21 с расточкой 22 и верхним буртом 23. Подвижной захват 15 соединен тягами 24 и 25 с полюсами 26 и 27. Неподвижный захват
13 соединен тягой 28 с полюсом 29 электро- магнита 12. Подвижный захват 15, тяга 25 и полюс 27 соединены с якорем 30 линейного шагового двигателя 20 при помощи тяги 31 якоря, на которой выполнены верхняя и
нижняя проточки 32 и 33 и выступ 34.
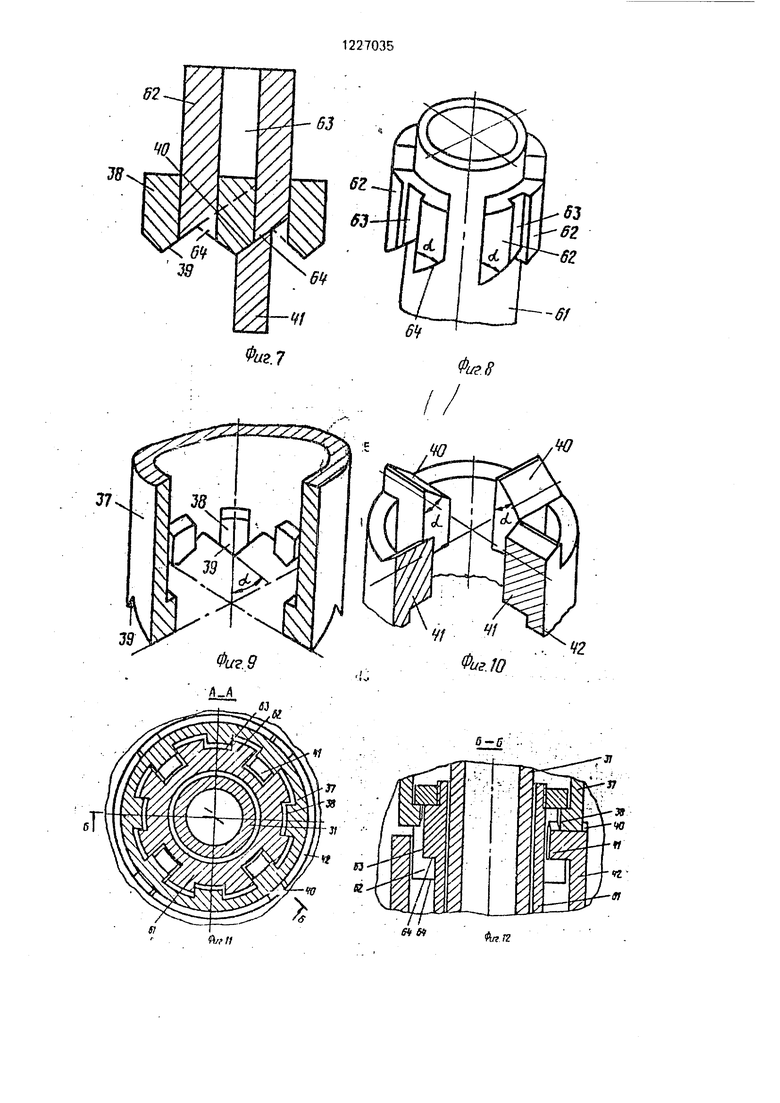
Механизм 17 имеет полюсы 35 и 36. Полюс 35 жестко соединен с втулкой с внутренними нижними выступами 37 (см. фиг.9), на которой выполнены выступы 38 с гранями 39, образующими с осью привода некоторый угол . Выступы 38 своими гранями 39 упираются в грани 40 выступов 41 втулки с верхними выступами 42 (см. фиг. 10). Грани 40 также образуют угол с продольной осью
описываемого привода.
Втулка с верхними выступами 42 установлена на подшипник 43, который в свою очередь, установлен на втулке 44, соединенной с хвостовиком 45 конусной втулки 46.
Хвостовик 45 выполнен в виде трех сегментов 47, пропуа еннь1х сквозь прорези 48 втулки 49 (см. фиг.15). Конусная втулка 46 подпружинена пружиной 50 относительно основной втулки 51. Втулка 49 является частью основной втулки 51, и между ними установлены верхние внешние шарики 52. Основная втулка 51 установлена на бурт 10 чехла 9 и трубчатой деталью 53 соединена с неподвижным захватом 13.
Во втулке 49 выполнены окна 54, в которых размещены верхние внутренние шарики 55, На основной втулке 51 выполнены выступ 56 и радиальные отверстия 57 (см.фиг. 14), в которых установлены нижние
внешние и внутренние шарики 58 и 59 и толкатели 60.
С втулкой 49 жестко соединена втулка 61 с наружными выступами (см. фиг.8), снабженная выступами 62. В выступах 62 выполиены пазы 63. Нижние поверхности выступов 62 образуют грани 64, расположенные под углом а к оси описываемого привода. Угол а больше угла трения материала выступов 38 втулки с внутренними нижними выступами по материалу выступов 41 втулки с верхними выступами 42 и больше угла трения материала выступов 41 втулки с верхними выступами 42 по материалу выступов 62 втулки с наружными выступами 61.
Наружный диаметр пазов 63, выполненных в выступах 62. больше внутреннего диаметра выступов 41. Внутренний диаметр выступов 38 больше диаметра пазов 63, но меньше диаметра выступов 62.
Штанга с выступами 65 соединена со штангой с выступами 66. Шаг между выступами 66 равен дискретному шагу перемещения якоря 30.
Ход якоря 30 больше расстояния L, на которое необходимо поднять блок перемещения 18 при переводе его в транспортное положение (см. фиг.З и фиг. 17), на величину I (см. фиг. 4).
Работает привод регулирующего орга- на ядерного реактора следующим образом.
В исходном положении (см. фиг.2 и фиг.З) на обмотки электромагнита 12 подается ток, полюс 29 поднят в верхнее положение под действием магнитного поля. Тяга 28 также в верхнем положении и зубья неподвижного захвата 13 находятся между выступами 66 штанги с выступами 65.
Остальные электромагниты обесточены. Полюс 35 с втулкой с внутренними ниж- ними выступами 37, втулкой с верхними выступами 42, втулкой 44 и конусной втулкой 46 отжаты пружиной 50 в верхнее положение. Выступы 38 и 41 относительно выступов 62 с пазами 63 занимают положа- ние, показанное на фиг.4, фиг.11, фиг.12.
Верхние внешние шарики 52 под воздействием конусной втулки 46 упираются в нижний торец трубы 21, препятствуя тем самым перемещению блока перемещения 18 вдоль оси описываемого привода.
Верхние внутренние шарики 55 не препятствуют перемещению тяги 31 якоря, которая выступом 34 опирается на выступ 56.
Для перемещения регулирующего орга- на 4 вверх подается ток на обмотку электромагнита 14, полюс 26 притягивается к полюсу 27, подвижный захват 15 сцепляет- ся со штангой с выступами 65.
Обесточивается электромагнит 12, якорь 29 опускается вниз, неподвижный захват 13 расцепляется со штангой с выступами 65. Последовательно коммутируются электромагниты 19 линейного электродвигателя 20, якорь 30 с ТЯГОЙ 31 якоря и тягой 25, подвижным захватом 15, штангой с выступами 65 и регулирующим органом 4 перемещаются вверх на необходимую высоту. При завершении хода линейный электродвигатель 20 переходит в стояноч- ный режим - удерживает якорь 30 силами магнитного поля. Включается электромагнит 12, неподвижный захват 15 расцепляется со штангой с выступами 65. Якорь 30 под действием собственного веса или путем обратной коммутации фаз линейного электродвигателя 20 опускается в крайнее нижнее положение. При необходимости дальнейшего перемещения вверх цикл повторяется.
При перемещении вниз (режим стоянки) электромагнит 12 включен, неподвижный захват 13 сцеплен со штангой с выступами 65. Начинается коммутация электромагнитов 19, и якорь 30 с тягой 31 якоря и открытым подвижным захватом 15 перемещаются вверх на расстояние, на которое необходимо опустить регулирующий Орган 4. Подается ток на электромагнит 14, полюс 26 притягивается к полюсу 27, подвижный захват 15 сцепляется со штангой с выступами 65. Обесточивается электромагнит 12 и неподвижный захват 13 расцепляется со штангой с выступами 65.
Обратный коммутацией электромагнитов 19 обеспечивается перемещение якоря 30, тяги 31 якоря, полюсов 26 и 27, тяг 24 и 25 с подвижным захватом 15, штангой с выступами 65 и регулирующим органом 4 вниз.
При завершении перемещения якорь 30 останавливается, включается электромагнит 12, неподвижный захват 13 сцепляется со штангой с выступами 65. Обесточивается линейный электродвигатель 20 и электромагнит 14, подвижный захват 15 расцепляется со штангой с выступами 65. Далее цикл повторяется.
При аварийном сбросе обесточиваются все электромагниты и регулирующий орган 4 свободно падает в активную зону.
При монтаже и перегрузках ядерного реактора 2 верхний блок 5 вместе с описываемыми привода 3 снимается с ядерного реактора 2 и устанавливается в шахту ревизии верхнего (не показана) блока. Для исключения повреждений штанг с выступами 65 и блоков перемещений 18 при монтаже и демонтаже верхнего блока 5 блоки перемещения 18 переводятся в транспортное положение, т.е. поднимаются на такое расстояние, чтобы нижние торцы блоков перемещения 18 были выше верхних торцов штанг с выступами 65.
Перевод в транспортное положение, осуществляется из исходного положения - электромагниты обесточены, регулирующий орган 4 находится в активной зоне 6, штанга с выступами 65 в блоке защитных труб 7.
Подается ток на обмотку дополнительного электромагнита 16, полюс 35 притягивается к полюсу 36. Втулка с внутренними нижними выступами 37 с выступами 38 перемещается вниз, воздействуя гранями 39 на грани 40 втулки с верхними выступами 42
и опускает ее. Втулка с верхними выступами 42 опускается до тех пор, пока острие угла выступа 41 не поравняется с острием угла выступа 62. После этого под действием пружины 50 грань 40 соскальзывает по граням 39, 64 и упирается в торец втулки с внутренними нижними выступами 37 (см. фиг.5), Обмотка электромагнита 16 oGecfопивается, Под дбйствием пружины 50 грань 40 выступа 41 соскальзывает по граням 64, припод- няв втулку с внутренними нижними выступами 37 с полюсом 35 вверх, занимает положение относительно выступов 62, показанное на фиг.6.
При перемещении вниз втулка с верхни- ми выступами 42 через подшипник 43 устанавливает коническую втулку 46 в положение, при котором последняя, опускаясь вниз, конической поверхностью освобождает верхние внешние шарики 52 и одновременно запирает верхние внутренние шарики 55, заставляя их через окна 54 закатываться в верхнюю проточку 32 тяги якоря 30 с механизмом 17. Так как диаметр пазов 63 втулки с наружными выступами 61 больше внутреннего диаметра выступов 41 втулки с верхними выступами 42, последняя не может изменить своего положения из-за фиксированного состояния втулок с наружными выступами 61. Затем путем последо- вательной коммутации электромагнитов 19 блок перемещения 18 якорем 30 перемещается вверх в транспортное положение (см, фиг. 16).
При движении блока перемещения 18 вверх нижние внешние шарики 58 наезжают на трубу 21, перемещаются к оси тяги якоря 31 и через толкатели 60 перемещают нижние внутренние шарики 59 в нижнюю проточку 33 на тяге 31 якоря. При достиже- НИИ блоком перемещения 18 верхнего положения полюс 35 упирается в бурт .3. Выступы 38, воздействуя на выступы 41, останавливают втулку с верхними выступами 42. Втулки с наружными выступами 61 с выступами 62 вместе с блоком перемещения 18 продолжают подниматься вверх. При достижении острием угла выступа 62 острия угла выступа 41 под действием пружины 50 грань 40 соскальзывает по граням 39 и 64 и упирается в торец втулки с внутренними нижними выступами 37 (см. фиг.7),
В результате данной операции выступ 41 выводится из паза 63, что позволяет в следующей операции втулке с верхними вы- ступами 42 перемещаться вверх.
Движение вверх якоря 30 и связанного с ним блока перемещения 18 прекращается. Верхние внешние шарики 52 находятся выше расточки 22 трубы 21. После этого под
действием собственного веса или 0 результате обратной коммутации фаз линейного электродвигателя 20 начинается движение якоря 30 вниз, При этом втулка с наружными выступами 61 вместе с блоком перемещения движется вниз, втулка с верхними выступами 42 под действием пружины 50 упирается в торец втулки с внутренними нижними выступами 37, поджимая полюс 35 к верхнему бурту 23. Грань 40 соскользне по грани 64 с выступа 62, При дальнейшем движении якоря 30 с блоком перемещения 18 вниз выступ 41 занимает положение относительно выступов 62 и 38, показанное на фиг,4.
При движении вниз втулки с наружными выступами 61 опускается и основная втулка 51, что позволяет пружине 50 поджать конусную втулку 46 вверх, тем самым обеспечить закатывание верхних наружных шариков 52 в расточку 22 трубы 21, а верхние внутренние шарики 55 освобождаются. В результате чего блок перемещения 18 фиксируется от движения вниз относительно чехла 9. Блок перемещения 18 остается сцепленным с якорем 30 шариками нижними внутренними 59. После того, как верхние наружные шарики 52 занимают положение в расточке 22, движение якоря 30 вниз прекращается. Блок перемещения 18 поднят в транспортное положение. Поскольку расстояние, на которое якорь 30 должен опуститься вниз строго определенно, то оно может быть легко заложено о алгоритм управления, например определенное число импульса линейного электродвигателя. В случае опускания якоря 30 под действием собственной массы остановка его происходит автоматически, как только верхние наружные шарики 52 закатываются в расточку 22, Все переключения электромагнитов и линейного электродвигателя осуществляются через определенные промежутки времени, также заложенные в алгоритм управления. Величина промежутка времени выбирается с запасом для гарантированного выполнения операций.
Перевод блока перемещения 18 вниз из транспортного положения (см. фиг. 16) в рабочее осуществляется следующим образом
Для этого необходимо верхние внутренние шарики 55 закатить в верхнюю проточку 32 тяги якоря 31, а верхним пнешним шариком 52 предоставить возможность выкатиться из расточки 22 трубы 21, что позволит сцепить якорь 30 с блоком перемещения 18 и расцепить его с чехлом 9, Исходное положение показано на фиг.4 и 16.
При движении блока перемещения 18 вверх вместе с ним движутся вверх и основная втулка 51 и верхние внешние и внутренние шарики 52 и 55, з конусная втулка 46 остается неподвижной, так как снизу ее поджимает пружина 50, а сверху ее движению препятствуют втулки 37, 42, подшипник 43 и втулка 44, полюс 35 которой упирается в верхний бурт 23. Таким образом, шарики верхние внутренние 55 наезжают на внутреннюю конусную поверхность конусной втулки 46 и закатываются в верхнюю проточку 32, а верхние внешние шарики 52 освобождаются от воздействия поверхности конусной втулки46 и получают возможность- выкатиться из расточки 22, ширина которой (см. фиг.2, 16) достаточна для того, чтобы при движении блока перемещения 18 вверх в момент, не освободились от воздействия конусной втулки 46 верхние внешние шарики 52, не произошло бы защемления верхних внешних шариков 52 между конусной втулкой 46 и трубой 21. Выступы 62 втулки с наружными выступами 61 вместе с блоком перемещения 18 перемещаются вверх до тех пор, пока острие угла выступа 62 не достигнет острия угла выступа 41, тогда под действием пружины 50 грань 40 соскользнет по граням 39 и 64 и упрется в торец вт;улки с внутренними нижними выс упами 37 (см. фиг.5), после чего движение якоря 30 и связанного с ним блока перемещения 18 прекраща ется.
На данном этапе все взаимные перемещения втулок 37,42,61 с проскальзыванием их выступов происходят с целью фиксации конусной втулки 46 в нижнем положении (относительно основной втулки 51) для запирания верхних внутренних шариков 55 в верхней проточке 32 с одновременным освобождением верхних наружных шариков 52 из расточки 22 с целью обеспечения гарантированного сцепления якоря 30 с блоком перемещения 18 с одновременным расцеплением блока перемещения 18 с чех- лом 9.
Движение блока перемещения 18 вверх прекращается в связи с тем, что полюс 36 движется вверх вместе с блоком перемещения 18, упирается в полюс 35, который упирается в верхний бурт 23. Затем под действием собственной массы или в результате обратной коммутации фаз линейного электродвигателя 20 начинается движение якоря 30 вниз, при этом втулка с наружными
выступами 61 вместе с блоком перемещения 18 движется вниз, втулка с верхними выступами 42 под действием пружины 50 соскальзывая гранями 40 по граням 64, про- 5 ворачивается вокруг своей оси, выступы 41 занимают положение относительно выступов 62, показанное на фиг.6. В процессе движения блока перемещения 28 вниз шарики 52 минуют нижний торец трубы 21, 0 после чего труба 21 перестает воздействовать на шарики 58, толкатели 60 и шарики 59. Якорь 30 остается связанным с блоком перемещения 18 верхними внутренними шариками 55. Движение якоря 30 с блоком
5 перемещения 18 прекращается после того, как основная втулка 51 опускается на бурт 10. Если движение вниз якоря 30 осуществляется линейным электродвигателем 20, он обесточивается. Подается ток на обмотку
0 электромагнита 16, полюс 35 притягивается к полюсу 36, сжимая пружину 50.
Втулка с внутренними нижними выступами 37 перемещается вниз, воздействуя гранями 39 на грань 40 втулки с верхними
5 выступами 42, опуская ее до тех пор, пока острие угла выступа 41 не поравняется с острием угла выступа 62. После этого под действием пружины 50 грань 40 соскользнет по граням 39, 64 и упрется в торец втул0 ки с внутренними нижними выступами 37 (см. фиг.7). Дополнительный электромагнит 16 обесточивается. Под действием пружины 50 грань 40 выступа 41 соскользнет по граням 64, приподняв втулку с внутренними
5 нижними выступами 37 и займет положение относительно выступов 62, показанное на фиг.4. При этом конусная втулка 46, поднимаясь вверх, наружной конической поверхностью воздействует на верхние внешние
0 шарики 52, которые упираются в нижний торец трубы 21, исключая движение блока перемещения 18 вверх. Одновременно с этим конусная втулка 46 освобождает верхние внутренние шарики 55, тем самым рас5 цепляя якорь 30 с блоком перемещения 18. Блок перемещения 18 находится в рабочем положении.
Использование изобретения позволит осуществлять автоматический перевод бло-,
0 ка перемещения в транспортное положение. В результате уменьшится время i простоя атомных электростанций и снизится облучение обслуживающего персонала.
.a
йЩ
:ггр W-.
С
тпр-п
J --i
тпр-п
Йл-/
10
л
д2
Фи.9
Фиг.Ю
64 6



| название | год | авторы | номер документа |
|---|---|---|---|
| ПРИВОД РЕГУЛИРУЮЩЕГО ОРГАНА ЯДЕРНОГО РЕАКТОРА | 2004 |
|
RU2273896C1 |
| ИСПОЛНИТЕЛЬНЫЙ МЕХАНИЗМ СИСТЕМЫ УПРАВЛЕНИЯ И ЗАЩИТЫ ЯДЕРНОГО РЕАКТОРА | 1988 |
|
SU1522973A1 |
| ПРИВОД РЕГУЛИРУЮЩЕГО ОРГАНА ЯДЕРНОГО РЕАКТОРА | 1999 |
|
RU2157007C1 |
| ПРИВОД РЕГУЛИРУЮЩЕГО ОРГАНА ЯДЕРНОГО РЕАКТОРА | 2002 |
|
RU2237298C2 |
| Привод регулирующего органа ядерного реактора | 1985 |
|
SU1259869A1 |
| Привод регулирующего органа ядерного реактора | 2002 |
|
RU2217821C1 |
| Линейный синхронный электропривод | 1975 |
|
SU696947A1 |
| ПРИВОД РЕГУЛИРУЮЩЕГО ОРГАНА ЯДЕРНОГО РЕАКТОРА | 1990 |
|
SU1830148A3 |
| ГРУППОВОЕ ЗАХВАТНОЕ УСТРОЙСТВО | 1999 |
|
RU2170698C1 |
| Устройство для захвата анододержателя | 1981 |
|
SU981457A1 |





7
. Sr
10
U2.16
п
Редактор Л.Письмам
Составитель Техред М.Моргентал
Заказ 2376ТиражПодписное
ВНИИПИ Государственного комитета по изобретениям и открыт.иям при ГКНТ СССР 113035, Москва. Ж-35, Раушская наб.. 4/5
Производственно-издательский комбинат Патент, г. Ужгород, ул.Гагарина, 101
Фиг.17
Корректор В.Петраш
| УСТРОЙСТВО ДЛЯ ИЗБИРАТЕЛЬНОГО ВЫЗОВА ТЕЛЕФОННЫХ АППАРАТОВ | 1922 |
|
SU1000A1 |
| М., ВНИИторгиздат | |||
| Способ изготовления электрических сопротивлений посредством осаждения слоя проводника на поверхности изолятора | 1921 |
|
SU19A1 |
| А | |||
| Привод регулирующего органа ядерного реактора | 1979 |
|
SU952015A1 |
| Выбрасывающий ячеистый аппарат для рядовых сеялок | 1922 |
|
SU21A1 |
