1
(21)4373180/27-03
(22)01.02.88
(46) 23.11.89. Бюл. № 43 (72) В.А. Большаков
(53)621.867(088.8)
(56)Заявка Франции № 2394477, кл. В 65 G 47/52, опублик. 1979.
Андрианов Ю.А. и др. Робототехника. Сер. Автоматические манипуляторы и робототехнические системы./Под ред. Е.П. Попова и др.- М.: Машиностроение, 1984, с. 258-260.
(54)УСТРОЙСТВО ДЛЯ ТРАНСПОРТИРОВКИ И ПЕРЕГРУЗКИ ИЗДЕЛИЙ
(57)Изобретение относится к автома- тизацци поточно-транспортных систем. Цель - повьшение надежности перегрузки. Устройство содержит манипулятор с захватами, датчики наличия исходного и рабочего положения изделий с размыкающими 7.1 и 7.2 и замыкающими 8.1 и 8.2 контактами и элементы 14 и 15 жесткой памяти, обеспечивающие запоминание нахождения изделия и управляющие работой исполнительных механизмов (ИМ) 10-13. Управление производится от командОаппарата 9 по сигналам с путевых переключателей. При достижении изделием датчика наличия исходного положения срабатьюают его контакты 7.1 и включают ИМ 10 зажима изделия. После захвата изделия с выхода 9. 5 комаадоаппарата 9 формируется сигнал на ИМ 12, включая перемещение манипул ятора в рабочую позицию, а с выхода 9.4 при этом поступает сигнал на ИМ 11 разжима. Затем с выхода 9.6 командоаппарата поступает сигнал на ИМ 13 возврата манипулятора в исходное состояние. При отсутствии изделия датчик наличия исходного положения не срабатывает, сигнал на ИМ 10 не проходит.С выхода 9,2 командоаппарата 9 через контакт 7.2 проходит сигнал на элемент 14 памяти, который переключается, замыкая контакт 14.3, и ИМ 12 перемещает манипулятор в рабочую -позицию. При пропадании электроснабжения за счет жесткой памяти устройство сохраняет записанную информацию. При восстановлении электроснабжения восстанавливается движение с позиции останова. Стирание информации происходит при поступлении сигнала с выхода 9.4 командоаппарата 9. 2 ил.
С Ш
СП ю
со
4
оо .i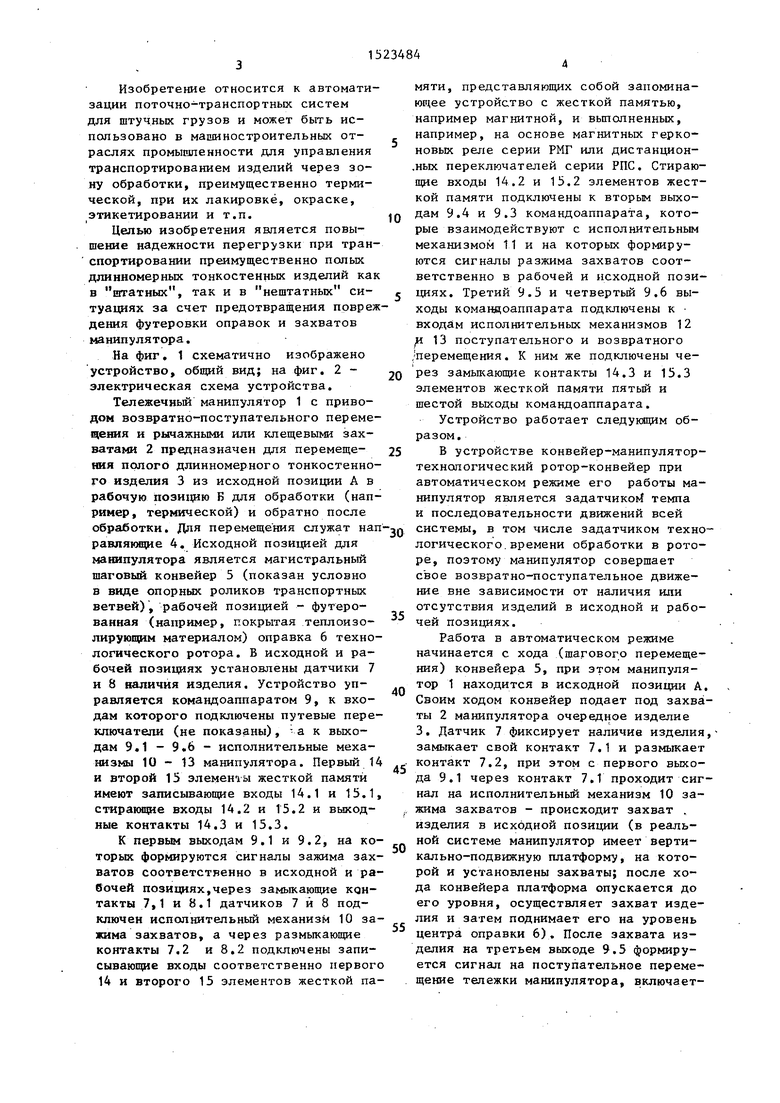
| название | год | авторы | номер документа |
|---|---|---|---|
| Автоматическая и дистанционная система для управления судовым двигателем внутреннего сгорания | 1982 |
|
SU1078116A1 |
| Система автоматического поиска поврежденного присоединения при замыкании на землю | 1985 |
|
SU1305403A1 |
| Устройство для автоматического выбора направления движения объекта | 1984 |
|
SU1247331A1 |
| Устройство управления забором тестовых заготовок в системе контроля параметров изделий пищевого назначения | 2018 |
|
RU2703415C1 |
| МНОГОЗОНАЛЬНОЕ СКАНИРУЮЩЕЕ УСТРОЙСТВО ДЛЯ ДИСТАНЦИОННОГО ПОЛУЧЕНИЯ ИЗОБРАЖЕНИЙ ПОЛНОГО ДИСКА ЗЕМЛИ С ГЕОСТАЦИОНАРНОЙ ОРБИТЫ | 2015 |
|
RU2589770C1 |
| Устройство для измерения коэффициента развертки осциллографа | 1988 |
|
SU1693558A1 |
| Устройство для управления перегрузочной тележкой распределительного конвейера | 1985 |
|
SU1265123A1 |
| УСТРОЙСТВО ДЛЯ КОНТРОЛЯ ИЗОЛЯЦИИ АККУМУЛЯТОРНОЙ БАТАРЕИ ЭЛЕКТРИЧЕСКОГО ТРАНСПОРТА | 1990 |
|
RU2010735C1 |
| СПОСОБ АВТОМАТИЧЕСКОЙ РАЗГРУЗКИ ПАРАЛЛЕЛЬНО РАБОТАЮЩИХ ГЕНЕРАТОРНЫХ АГРЕГАТОВ | 2019 |
|
RU2731760C1 |
| ПОДСИСТЕМА ПРЕДСТАВЛЕНИЯ ИНФОРМАЦИИ О ХАРАКТЕРИСТИКАХ РАДИОТЕХНИЧЕСКОЙ СИСТЕМЫ, ЗАВИСЯЩИХ ОТ СВОЙСТВ РЕЛЬЕФА МЕСТНОСТИ | 1994 |
|
RU2087001C1 |
Изобретение относится к автоматизации поточно-транспортных систем. Цель - повышение надежности перегрузки. Устройство содержит манипулятор с захватами, датчики наличия исходного и рабочего положения изделий с размыкающими 7.1 и 7.2 и замыкающими 8.1 и 8.2 контактами и элементы 14 и 15 жесткой памяти, обеспечивающие запоминание нахождения изделия и управляющие работой исполнительных механизмов (ИМ) 10-13. Управление производится от командоаппарата 9 по сигналам с путевых переключателей. При достижении изделием датчика наличия исходного положения срабатывают его контакты 7.1 и включают ИМ 10 зажима изделия. После захвата изделия с выхода 9.5 командоаппарата 9 формируется сигнал на ИМ 12, включая перемещение манипулятора в рабочую позицию, а с выхода 9.4 при этом поступает сигнал на ИМ 11 разжима. Затем с выхода 9.6 командоаппарата поступает сигнал на ИМ 13 возврата манипулятора в исходное состояние. При отсутствии изделия датчик наличия исходного положения не срабатывает, сигнал на ИМ 10 не проходит. С выхода 9.2 командоаппарата 9 через контакт 7.2 проходит сигнал на элемент 14 памяти, который переключается, замыкая контакт 14.3, и ИМ 12 перемещает манипулятор в рабочую позицию. При пропадании электроснабжения за счет жесткой памяти устройство сохраняет записанную информацию. При восстановлении электроснабжения восстанавливается движение с позиции останова. Стирание информации происходит при поступлении сигнала с выхода 9.4 командоаппарата 9. 2 ил.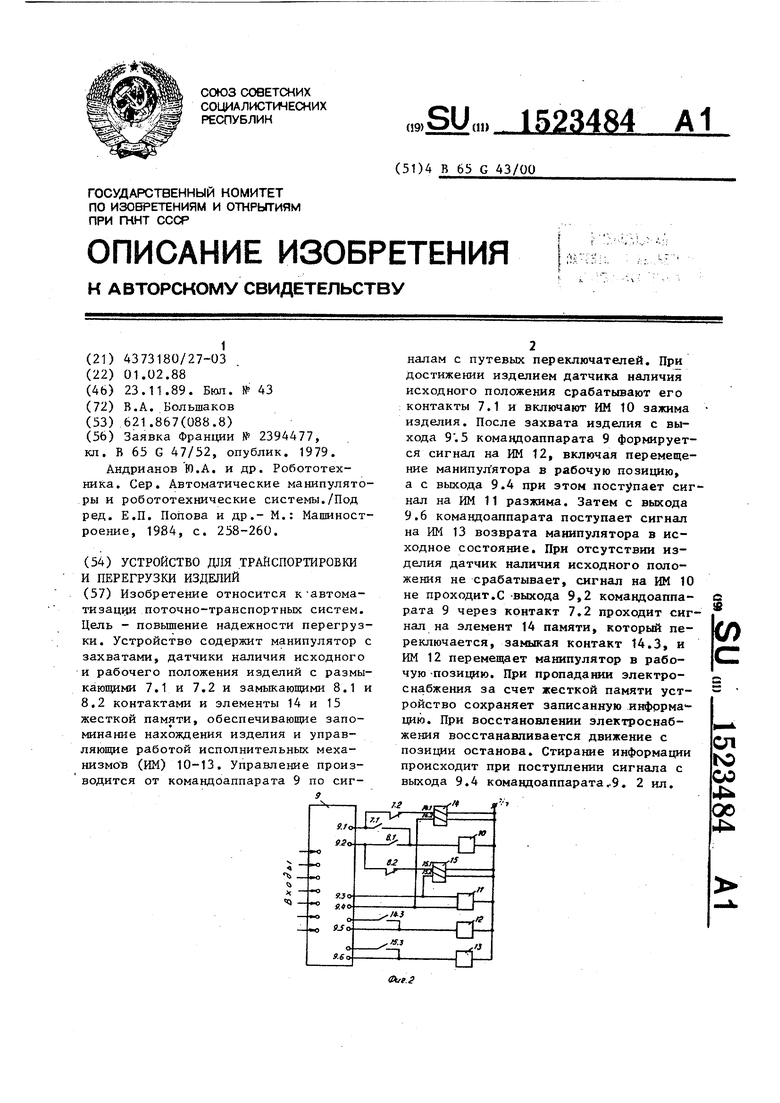
4
U
X Ч
Изобретение относится к автоматизации поточно-транспортных систем для штучных грузов и может быть использовано в машиностроительных отраслях промышленности для управления транспортированием изделий через зону обработки, преимущественно термической, при их лакировке, окраске, этикетировании и т.п.
Целью изобретения является повышение надежности перегрузки при транспортировании преимущественно полых длинномерных тонкостенных изделий как
в штатных.
так и в нештатных ситуациях за счет предотвращения повреждения футеровки оправок и захватов манипулятора.
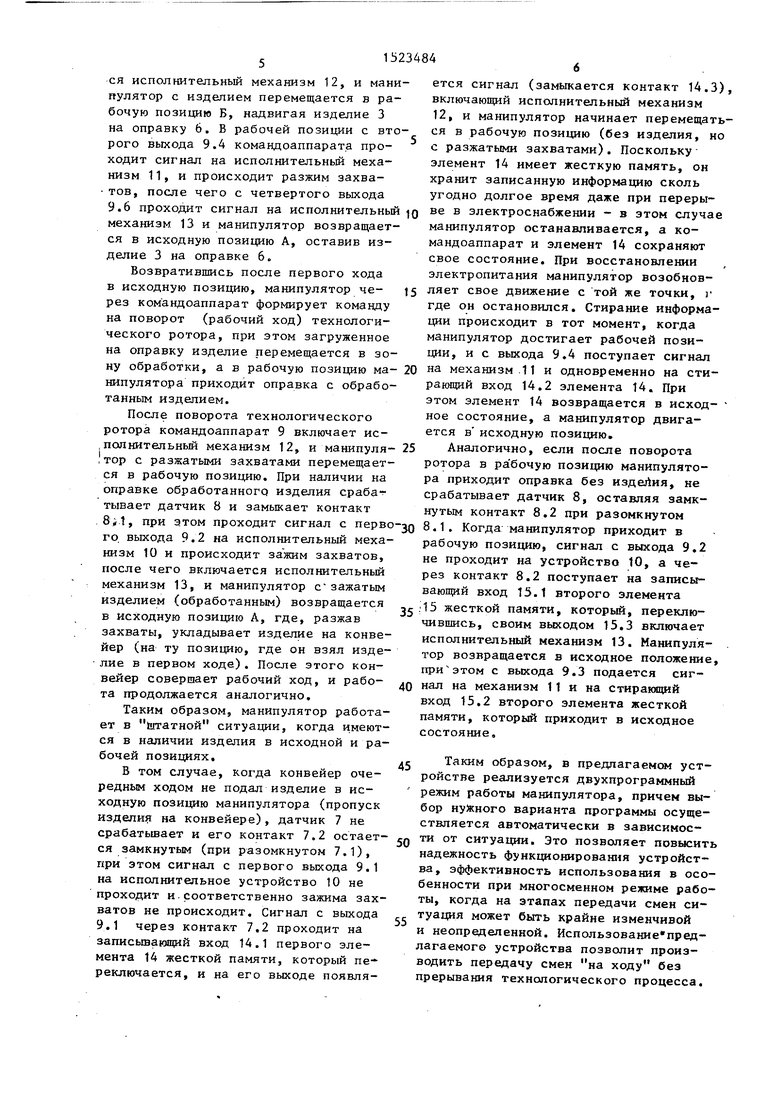
На фиг. 1 схематично изображено устройство, общий вид; на фиг. 2 - электрическая схема устройства.
Тепежечиьй манипулятор 1 с приводом возвратно-поступательного перемещения и рычажными или клещевыми захватами 2 предназначен для перемеще- laiH полого длинномерного тонкостенного изделия 3 из исходной позиции А в рабочую позицию Б для обработки (например, термической) и обратно после обработки. Для перемещения служат направляющие 4, Исходной позицией для манипулятора является магистральный шаговый конвейер 5 (показан условно в виде опорных роликов транспортных ветвей), рабочей позицией - футерованная (например, покрытая теплоизолирующим материалом) оправка 6 технологического ротора. В исходной и рабочей позициях установлены датчики 7 и 8 наличия изделия. Устройство управляется командоаппаратом 9, к входам которого подключены путевые переключатели (не показаны), -а к выходам 9,1 - 9.6 - исполнительные механизмы 10 - 13 манипулятора. Первый 14 и второй 15 элементы жесткой памяти имеют записывающие входы 14.1 и 15.1, стирающне входы 14.2 и 15.2 и выходные контакты 14.3 и 15.3.
К первым выходам 9.1 и 9.2, на которых формируются сигналы зажима захватов соответственно в исходной и рабочей позициях,через замыкающие контакты 7,1 и 8.1 датчиков 7 и 8 подключен исполнительный механизм 10 зажима захватов, а через размыкающие контакты 7.2 и 8,2 подключены записывающие входы соответственно первого 14 и второго 15 элементов жесткой па
0
5
а
5
0
5
0
5
мяти, представляющих собой запоминающее устройство с жесткой памятью, например магнитной, и выполненных, например, на основе магнитных герко- новых реле серии РМГ или дистанцион- ,ных переключателей серии РПС. Стирающие входы 14.2 и 13.2 элементов жесткой памяти подключены к вторым выходам 9.4 и 9.3 командоаппарата, которые взаимодействуют с исполнительным механизмом 11 и на которых формируются сигналы разжима захватов соответственно в рабочей и исходной позициях. Третий 9.5 и четвертый 9.6 выходы командоаппарата подключены к входам исполнительных механизмов 12 1 13 поступательного и возвратного /перемещения. К ним же подключены через замыкаюшие контакты 14.3 и 15.3 элементов жесткой памяти пятьй и шестой выходы командоаппарата.
Устройство работает следукщим образом.
В устройстве конвейер-манипулятср- технопогический ротор-конвейер при автоматическом режиме его работы манипулятор является задатчикоь темпа и последовательности движений всей системы, в том числе задатчиком технологического, времени обработки в роторе, поэтому манипулятор совершает свое возвратно-поступательное движение вне зависимости от наличия или отсутствия изделий в исходной и рабочей позициях.
Работа в автоматическом режиме начинается с хода (шагового перемещения) конвейера 5, при этом манипулятор 1 находится в исходной позиции А. Своим ходом конвейер подает под захваты 2 манипулятора очередное изделие 3, Датчик 7 фиксирует наличие изделия,- замьжает свой контакт 7.1 и размыкает контакт 7.2, при этом с первого выхода 9.1 через контакт 7,1 проходит сигнал на исполнительный механизм 10 зажима захватов - происходит захват . изделия в исходной позиции (в реальной системе манипулятор имеет вертикально-подвижную платформу, на которой и установлены захваты; после хода конвейера платформа опускается до его уровня, осуществляет захват изделия и затем поднимает его на уровень центра оправки 6), После захвата изделия на третьем выходе 9.5 формируется сигнал на поступательное перемещение тележки манипулятора, включаетется сигнал (замыкается контакт 14.3) включающий исполнительный механизм 12, и манипулятор начинает перемещать ся в рабочую позицию (без изделия, но с разжатыми захватами). Поскольку элемент 14 имеет жесткую память, он хранит записанную информацию сколь угодно долгое время даже при перерымандоаппарат и элемент 14 сохраняют свое состояние. При восстановлении электропитания манипулятор возобнов- 15 ляет свое движение с той же точки, г где он остановился. Стирание информации происходит в тот момент, когда манипулятор достигает рабочей позиции, и с выхода 9.4 поступает сигнал
этом элемент 14 возвращается в исходное состояние, а манипулятор двигается в исходную позицию.
Аналогично, если после поворота ротора в ра бочую позицию манипулятора приходит оправка без издеЛия, не срабатывает датчик 8, оставляя замкнутым контакт 8.2 при разомкнутом
ся исполнительный механизм 12, и манипулятор с изделием перемещается в рабочую позицию Б, надвигая изделие 3 на оправку 6. В рабочей позиции с второго выхода 9.4 командоаппарата проходит сигнал на исполнительньй механизм 11, и происходит разжим захватов, после чего с четвертого выхода 9.6 проходит сигнал на исполнительный Q ве в электроснабжении - в этом случае механизм 13 и манипулятор возвращает- манипулятор останавливается, а кося в исходную позицию А, оставив изделие 3 на оправке 6.
Возвратившись после первого хода в исходную позицию, манипулятор через ком андоаппарат формирует команду на поворот (рабочий ход) технологического ротора, при этом загруженное на оправку изделие перемещается в зону обработки, а в рабочую позицию ма- 20 на механизм .11 и одновременно на сти- нипулятора приходит оправка с обрабо- рающий вход 14.2 элемента 14. При танньм изделием.
После поворота технологического ротора командоаппарат 9 включает ис,полнительный механизм 12, и манипуля- 25
I тор с разжатыми захватами перемещается в рабочую позицию. При наличии на оправке обработанного изделия сраба- тывает датчик 8 и замыкает контакт
Bit, при этом проходит сигнал с перво-зо 8.1. Когда манипулятор приходит в го. выхода 9.2 на исполнительный меха- рабочую позицию, сигнал с выхода 9.2
низм 10 и происходит зажим захватов, после чего включается исполнительньй механизм 13, и манипулятор с зажатым
не проходит на устройство 10, а через контакт 8.2 поступает на записывающий вход 15.1 второго элемента
не проходит на устройство 10, а через контакт 8.2 поступает на записывающий вход 15.1 второго элемента
изделием (обработанным) возвращается ,J5 ; 15 жесткой памяти, который, переклюв исходную позицию А, где, разжав захваты, укладывает изделие на конвечившись, своим выходом 15.3 включает исполнительный механизм 13. Манипуля тор возвращается в исходное положени приватом с выхода 9.3 подается сигйер (на ту позицию, где он взял изделие в первом ходе). После этого конвейер совершает рабочий ход, и рабо- дд „ал на механизм 11 и на стирающий та продолжается аналогично.вход 15.2 второго элемента жесткой
чившись, своим выходом 15.3 включа исполнительный механизм 13. Манипу тор возвращается в исходное положе приватом с выхода 9.3 подается си
Таким образом, манипулятор работает в Штатной ситуации, когда имеются в наличии изделия в исходной и рабочей позициях,
В том случае, когда конвейер очередным ходом не подал изделие в исходную позицию манипулятора (пропуск изделия на конвейере), датчик 7 не срабатьшает и его контакт 7.2 остается замкнутым (при разомкнутом 7.1), при этом сигнал с первого выхода 9.1 на исполнительное устройство 10 не проходит и.соответственно зажима захпамяти, который приходит в исходное состояние,
дс Таким образом, в предлагаемом у ройстве реализуется двухпрограммны режим работы манипулятора, причем бор нужного варианта программы осу ствляется автоматически в зависимо
Q ти от ситуации. Это позволяет повы надежность функционирования устрой ва, эффективность использования в о бенности при многосменном режиме ра ты, когда на этапах передачи смен с
ва тов не происходит. Сигнал с выхода туация может быть крайне изменчивой
ется сигнал (замыкается контакт 14.3), включающий исполнительный механизм 12, и манипулятор начинает перемещаться в рабочую позицию (без изделия, но с разжатыми захватами). Поскольку элемент 14 имеет жесткую память, он хранит записанную информацию сколь угодно долгое время даже при перерыве в электроснабжении - в этом случае манипулятор останавливается, а командоаппарат и элемент 14 сохраняют свое состояние. При восстановлении электропитания манипулятор возобнов- ляет свое движение с той же точки, г где он остановился. Стирание информации происходит в тот момент, когда манипулятор достигает рабочей позиции, и с выхода 9.4 поступает сигнал
ве в электроснабжении - в этом случае манипулятор останавливается, а кона механизм .11 и одновременно на сти- рающий вход 14.2 элемента 14. При
этом элемент 14 возвращается в исходное состояние, а манипулятор двигается в исходную позицию.
Аналогично, если после поворота ротора в ра бочую позицию манипулятора приходит оправка без издеЛия, не срабатывает датчик 8, оставляя замкнутым контакт 8.2 при разомкнутом
на механизм .11 и одновременно на сти- рающий вход 14.2 элемента 14. При
не проходит на устройство 10, а через контакт 8.2 поступает на записывающий вход 15.1 второго элемента
; 15 жесткой памяти, который, переклю 15 жесткой памяти, который, переклю„ал на механизм 11 и на стирающий вход 15.2 второго элемента жесткой
чившись, своим выходом 15.3 включает исполнительный механизм 13. Манипулятор возвращается в исходное положение, приватом с выхода 9.3 подается сигпамяти, который приходит в исходное состояние,
Таким образом, в предлагаемом устройстве реализуется двухпрограммный режим работы манипулятора, причем выбор нужного варианта программы осуществляется автоматически в зависимости от ситуации. Это позволяет повысить надежность функционирования устройства, эффективность использования в особенности при многосменном режиме работы, когда на этапах передачи смен сии неопределенной. Использование пред- лагаемого устройства позволит производить передачу смен на ходу без прерывания технологического процесса.
.Формула изобрет
е н и я
Устройство для транспортировки и перегрузки изделий, содержащее манипулятор с захватами, командоаппарат, подключенный входами к путевым пере- .кпючателям,выходами - к исполнительным механизмам разжима изделия, поступательного и возвратного перемещения, отличающееся тем, что, с целью повышения надежности перегрузки, оно снабжено датчиками наличия исходного и рабочего положений изделия, и первым и вторым элементами жесткой памяти, записывающие
0
5
входы которых подключены через размыкающие контакты соответствующих датчиков наличия изделия к соответствующим первым выходам командоаппарата, которые через замыкающие контакты этих же датчиков подключены к исполнительному механизму зажима изделия, вторые выходы командоаппарата подключены к стирающим входам элементов жесткой памяти, пятый и шестой выходы командоалпарата через выходные замыкающие контакты элементов жесткой памяти подключены соответственно к исполнительным механизмам поступательного и возвратного перемещения.
6
8
0t/e:i
