2.Устройство по п. I, отличающееся тек, что блок реализации адреса содержит по количеству рабочих позиций элементы И и элемент ИЛИ, вход которого является выходом блока, а входы подключены к выходам элементов И, одни из входов которых и другие входы являются соответственно первым и вторым входами блока.
3.Устройство по п. 1, отличающееся тем, что каждый из блоков управления приводом перемещения тележки «Вперед
, и «Назад содержат элементы И, ИЛИ, НЕ и ЗАПРЕТ, причем первый элемент ИЛИ выходом подключен к одному из входов первого элемента И, выход которого соединен с одним из входов второго элемента ИЛИ, подключенного другим входом к выходу второго элемента И, один из входов которого соединен с выходом элемента ЗАПРЕТ, подключенного входом к выходу второго элемента ИЛИ, а другой - с вь5лодом элемента НЕ, вход которого, другой вход и входы первых элементов И и ИЛИ и запрещающий вход элемента являются соответственно вторым, первым, четвертым, пятым и третьим входами блока, а выход второго элемента И - выходом блока.
4.Устройство по п. 1, отличающееся тег-л, что каждый из блоков управления приводом механизма перегрузки «По часовой стрелке и «Против часовой стрелки содержит элементы И, ИЛИ я ЗАПРЕТ, причем первый элемент ИЛИ выходом подключен к входу первого элемента ЗАПРЕТ, выход которого соединен с одними из входов элемента И, подключенного выходом к входу второго элемента ЗАПРЕТ, запрещаюШ.ИЙ вход которого соединен с выходом второгб элемента ИЛИ, а выход - с одним из входов первого элемента ИЛИ, другой вход которого, входы второго элемента ИЛИ, запрещающий вход первого элемента ЗАПРЕТ, другой вход и выход элемента И являются соответственно первым, четвертым, пятым, третьим и первым входами и выходом блока.
5.Устройство по п. {, отличающееся тем, что пост вызова тележки содержит кнопку управления, элементы ИЛИ и И, последний из которых одним из входов подключен к выходу элемента ИЛИ, соединенного одним из входов с кнопкой управления, а другим - с выходом элемента И, другой вход которого и выход явля1отся соответственно входом и выходом поста.




| название | год | авторы | номер документа |
|---|---|---|---|
| СИСТЕМА ЭЛЕКТРИЧЕСКОГО ПИТАНИЯ ДЛЯ ПОСТАНОВКИ ЭЛЕКТРОВОЗОВ НА РЕМОНТНУЮ ПОЗИЦИИЮ | 2002 |
|
RU2229989C1 |
| Устройство для управления линейным тяговым двигателем тележек рельсового транспорта | 1981 |
|
SU1224192A1 |
| Устройство для транспортировки и перегрузки изделий | 1988 |
|
SU1523484A1 |
| Устройство для автоматического выбора направления движения объекта | 1984 |
|
SU1247331A1 |
| ГОРИЗОНТАЛЬНО ЗАМКНУТЫЙ ТЕЛЕЖЕЧНЫЙ КОНВЕЙЕР | 1991 |
|
RU2013330C1 |
| Устройство для управления двумя параллельно включенными теплообменными аппаратами | 2023 |
|
RU2799614C1 |
| Устройство управления электродвигателями транспортных средств кольцевой слиткоподачи | 1983 |
|
SU1161204A1 |
| СПОСОБ АВТОМАТИЧЕСКОЙ РАЗГРУЗКИ ПАРАЛЛЕЛЬНО РАБОТАЮЩИХ ГЕНЕРАТОРНЫХ АГРЕГАТОВ | 2019 |
|
RU2731760C1 |
| Конвейер для распределения грузов | 1984 |
|
SU1273317A1 |
| Устройство для электропитания транспортного средства | 1984 |
|
SU1238987A1 |

1. УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ПЕРЕГРУЗОЧНОЙ ТЕЛЕЖКОЙ РАСПРЕДЕЛИТЕЛЬНОГО КОНВЕЙЕРА, содержащее блоки управления приводами перемещения тележки «Вперед и «Назад и механизма перегрузки «По часовой стрелке и «Против часовой стрелки, подключаемые одними из входов к выходам соответствующих командных элементов «Вперед, «Назад, «По часовой стрелке, «Против часовой стрелки, а другими - к выходу блока реализации адреса, один их входов которого соединен с выходами задающих элементов адре.сователя по числу рабочих позиций, на которых установлены адресные дат. чики с возможностью взаимодействия с щинами тележки, выходы первых двух блоков взаимно подключены к их третьим входам и .к входам исполнительного блока, кинематически связанного с тяговым органом, выполненным в виде электропроводного троса, огибающего -установленные на кронштейнах щкивы приводной и натяжной станций и поддерживающие ролики, закрепленные концами к зажимам узлов зачаливания тележки, выходы вторых двух блоков взаимно подключены к их третьим входам, а через одни из троллеев и щетки токосъемника, установленного на тележке, - к входам блока привода механизма перегрузки, датчики верхнего и нижнего положений толкателей которого соединены через другие щетки и троллеи с четвертыми и пятыми входами этих блоков, и датчики отсутствия и наличия груза на площадках приема и отправления рабочих позиций, подключенные непосредственно и через посты вызова тележки соответственно к сигнальным элементам на пульте оператора, отличающееся тем, что, с целью увеличения производительности и надежности, оно снабжено узлом ИЛИ, командным элементом onpota, токосъемник содержит привод стыковки и пружины возврата и выполнен подвижным с возможностью контактирования щеток с троллеями, узлы зачаливания, кронштейны щкивов тягового органа, один i из которых включает зажим, установлены на электроизоляционных прокладках, кинеW матическая связь включает электроизоляционную втулку, а поддерживающие ролики выполнены из электроизоляционного материала, причем командный элемент опроса подключен к одному из входов узла ИЛИ, другие входы которого соединены с командными элементами «Вперед, «Назад, «По ts:) часовой стрелке и «Против часовой стрело: ки, третьи -.с выходами блоков управлесл ния приводом механизма перегрузки «По часовой стрелке и «Против часовой стрелIs5 ки, а выход подключен к зажиму одного СО из щкивов тягового органа, один из выводов привода стыковки подключен к корпусу тележки, другой вывод привода стыковки и другие выводы датчиков верхнего и нижнего положений толкателей соединены с зажимом одного из узлов зачаливания, вторые троллеи подключены к четвертым и пятым входам блоков управления приводом перемещения тележки «Вперед и «Назад, адресные датчики подключены к другому входу блока реализации адреса.
Изобретение относится к промь шленному транспорту, в частности к устройствам управления перегрузочными соедствами распределительных конвейеров, и может быть использовано для автоматического адресования грузов на рабочих местах поточных технологических процессов.
Цель изобретения - увеличение производительности и надежности,
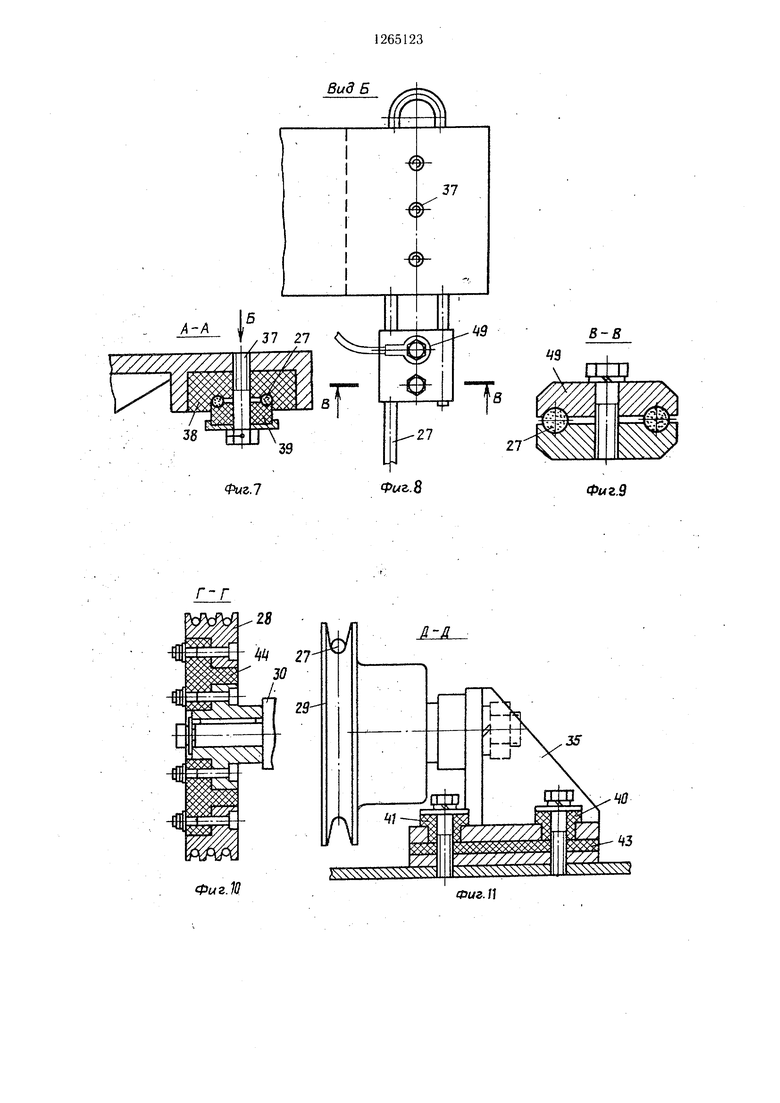
На фиг.. изображена функциональная схема устройства; на фиг. 2 -- логическая схема rioCTOB вызова плоигадкк отправ.пения рабочей позиции; на фиг. 3 - ло1Ч;ческая схема блока реализации адреса; ча фиг. 4 - логическая схема исполнительиого блока привода механизма перегрузки; на фиг. 5 --- логическая схема исполиительного блока привода тележки; на фиг. б - схема расположения адресных датчиков вдоль транспортной трассы перегрузочной тележки с учетом попарного совмещения площадок отправления соседних П }отивоположпо расположенных левосторонних и правосторонних рабочих позиций; на фиг. 7 -- разрез А--А на фиг. 6 (устрой(::тво узла зачгъливания и эле-лроизоляции тягового токопроводящего органа тележ ; -:}; на фиг. 8 - - вид Б на фиг. 7; на фиг. Э -
:
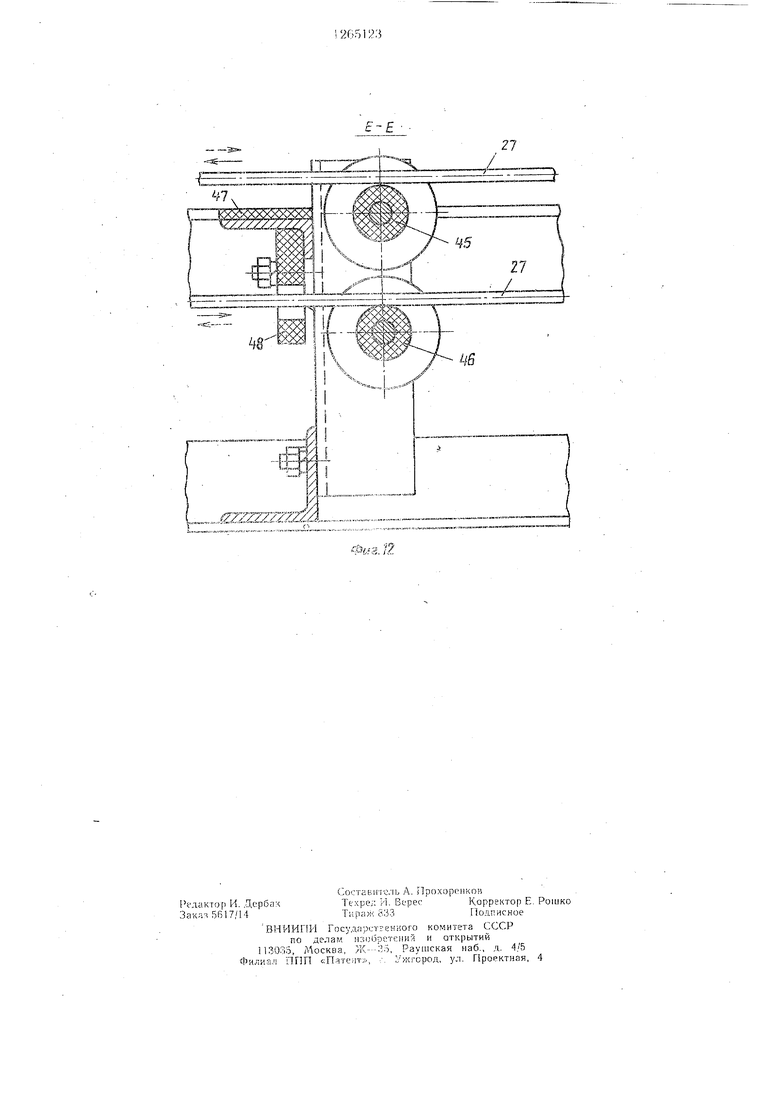
разрез В-В нафиг. 8; на фиг. 10 - разрез на фиг. 6 (л/стройство узла электроизоляции тягового токопроводящего органа на приводном щкиву); на фиг. li - разрез Д- Д на фиг. 6 (устройство узла электроизоляции тягового токопроводящего органа на натяжном шкиву); на фиг. 12 - разрез Е-Е на фиг. 6 (система узлов электроизоляции тягового токопроводящего органа тележки от корпуса металлоконструкции распределительного конвейера вдоль транспортной трассы).
Устройство для управления перегрузочиой тележкой распределительного конвейера включает в себя адресные датчики 1.1 - i.n рабочих позиций, расположенные по обе стороны вдоль транспортной трансы тележки (например, четные справа, нечетные - слева), датчики 2.1-2.П отсутствия груза на площадках приема и датчики 3.1-З.п наличия груза на площадках отправления каждой рабочей ПОЗИ.ЦИИ, посты 4.1-4.п вызова тележки к площадкам отправления, сигнальные элементы 5.1-5.п запроса груза на свободные площадки приема рабочих позиций, сигнальные элементы 6.1-б.п потребности съема груза с площадок отправления рабочих позиций, блоки 7.1 и 7.2 управления приводом перемещения тележки «Вперед и «Назад командными кнопками 8.1 и 8.2 «Вперед и «Назад, блоки 9.1 и 9.2 управления приводом механизма перегрузки «По часовой стрелке и «Против часовой стрелки с командными кнопками 10.1 и 10.2 «По часовой стрелке и «Против часовой стрелки, датчики 11.1 «Верхнего и 11.2 «Нижнего положений толкателей и соответствующие сигнальные элементы 12.1 и 12.2, адресователь 13 с задающими элементами 14.1 -14.п рабочих позиций и блоком 15 реализации адреса, пусковой блок 16 с кнопкой 17 опроса, токосъемник 18 механизма перегрузки с контактными щетками I8.I - 18.4, приводом 19 стыковки и пружинами 20 возврата его в исходное нерабочее положение, токопроводящие троллеи 21.1-21.4, электродвигатель 22 и электромеханический тормоз привода тележки, а также ектродвигатель 24 и электромеханический тормоз 25 привода механизма перегрузки (фиг. 1). Электродвигатель 22 (например, со встроенным редуктором) кинематически связан с грузонесущей тележкой 26 через тяговый орган 27, щкивы 28 и 29 и приводной вал 30 (фиг. 1). Электродвигатель 24 (например, также со внутренним редуктором) кинематически связан с толкателями 31 и упором 32 механизма 33 перег(5узки, при этом толкатели 31 выполнены с возможностью взаимодействия с груз(Уносителем (например, контейнером, поддоном и т. д.), а подвижный упор 32 выполнен с возможностью взаимодействия со стационарно закрепленными датчиками ll.i «Верхнего и 11.2 «Нижнего положений толкателей (фиг. 1). Тяговый орган 27 выполнен тркопррводящим и электроизолированным от корпуса металлоконструкций тележки и распределительного конвейера. Электроизоляция тягового токопроводящего органа 27, например троссового, осуществляется за счет того, что кронщтейны 34 и 35 приводной 28 и натяжной 29 станций и узлы 36 и 37 зачаливания закреплены на распределительном конвейере и тележке 26 с использованием электроизоляционных втулок 38-41 и прокладок 42 и 43. Приводная станция 28 соединена с валом 30 электродвигателя 22 через эле- , ктроизоляционную втулку 44, а поддерживающие ролики верхней 45 и нижней 46 ветвей тягового токопроводящего органа 27, расположенныё через необходимые интервалы вдоль транспортной трассы, выполнены также из электроизоляционного материала,. например текстолита. Кроме того, на металлоконструкции распределительного конвейера вдоль верхней и нижней ветвей тягового токопроводящего органа 27 имеются дополнительные электроизоляционные про.кладки 47 и втулки 48. Тяговый токопроводящий орган 27 с одной стороны через зажим 49 соединен с питающим выводом привода 19 токосъемника, заземляющий вывод которого соединен с корпусом тележки 26, а с другой стороны через зажим 50 соединен с выходом пускового блока 16, выполненного в виде логического элемента ИЛИ, на вход которого подключены выходы кнопок 8.1,8-.2,10.1,10.2 и 17 и выходы блоков 9.1 и 9.2 (фиг. 1,7,10 12). Для контроля хода выполнения технологических операций на рабочих позициях и создания удобств управления грузопотоком имеется пульт 51 с информационным табло, на котором расположены сигнальные элементы 5.1-5.п запроса полуфабрикатов, подключенные к выходам соответствующих датчиков 2.1-2.п отсутствия груза на площадках приема рабочих позиций, а также расположены сигнальные элементы 6.1-б.п потребности съема готовых изделий, подключенные к выходам соответствующих постов 4.1-4.П вызова, входы которых в свою очередь подключены к выходам соответствующих датчиков 3.1-З.п наличия груза на площадках отправления рабочих позиций (фиг. 1). Каждый пост вызова содержит элемент И 52, элемент ИЛИ 53 и кнопку 54 управления, причем кнопка 54, элемент ИЛИ 53 и элемент И 52 соединены последовательно, выход элемента И 52 связан с вторым входом элемента ИЛИ 53 и-с выходом поста, а второй вход элемента И 52 связан с входом поста (фиг. 2). Для сокращения (в два раза) количества элементов адресования и уменьщения перегрузочных операций а.фресные датчики 1.1 - 1.П рабочих позиций установлены только напротив площадок приема, при этом в соседних противоположно расположенных (левосторонних и правосторонних) рабочих позициях, площадки приема и площадки отправления размещены попарно строго друг напротив друга (фиг. 6). Для обеспечения н адежного адресования перегрузочной тележки по рабочим позициям выходы адресных датчиков 1.1 - 1.п поочередно взаимодействующее с закрепленным на тележке 26 адресоносителем 55 (например щунтом в виде металлической лыжи), подключены к первой группе входов блока 15 реализации адреса, к второй группе подключены выходы задающих элементов 14. 14.П адресователя 13, при этом выход блока 15 подключен к первым разрешающим входам блокбв 9.1 и 9.2 и к первым запрещающим входам блоков 7.1 и 7.2 а к их вторым входам подключены соответствующие кнопки 10.1,10.2,8.1 И8.2 (фиг. 1). Адресователь 13 выполнен в виде клаишного переключателя, у которого задащими элементами 14..п являются онтактные группы каждой клавии и, имеющие индивидуальную возможность включения и механическую фиксацию утопленного состояния каждой из них, а также автома ический сброс ранее, включенной контактной клавишной группы.
Блок 15 реализации адреса содержит элементы И 56.1-5б.п,по количеству адресных рабочих позиций и один элемент ИЛИ 57 причем выход последнего связан с выходом блока, а его входы подключены к. выходам элементов И 56.1-5б.п, первые и вторые входы которых связаны с соответствующими входами первой и второй групп входов блока (фиг. 3).
Для повышения надежности работы (за счет применения средств автоматического отключения привода тележки при неправильном расположении толрсателей - механизма перегрузки), один ГаЗ выводов датчиков «Верхнего 11.1 и «Нижн:его П .2 положений толкателей под1{люче ;ы х питающему зажиму 49 тягового тпкопроводящего о)гана 27, а другие чере: -г.сответствуюплие контакты щеток 18.1 н 18.2 токосьемникЕ 8 ,и токопроводяшйг т-рол.яеи И 1.1 и 21.2 подключены к зходак соотпетствующих сигнальнгэтх элементо -. «Внерху 12.1 и «Внизу 12.2, а также подкл)очены к третьим н четвертым запрещаюнгклт входам блоков 9.1 и 9.2 при80.п.а механиз-ма перегрузки и третьим и четвертым разргшаю1.ци1ч входам блоков 7.1 и 7,2 привода телегкки, а пятые запрешаюи ие входы сиедикены с выходами взаимно противоположных блоков общих приводов, а именко; пятый вход блока 9. соединен с выходом блока 9.Я. а пятый вход блока 9.2 соед| нек с выходом блока 9.: аналогично пятый вход блока 7.1 соединен с выходом блока 7.2, а пкть:й вход блока 7.2 соединен с выходом блока 7„1 при этом выходы блоков 7.1 и 7.2 соединоньс соответствующими входами ;-; ;ектродвигателя 22 и электроглеханическогЗ тор5ло;;,а 23 привода тележкк, а выходы блоков 3, и 9.2 соединены через соотзетстиуюш.ке токопроводящие троллеи 21.3 и 21.4i контвктные щетки 18.3 и 18.4 токосъемника )о с входами электродвигателя 24 и электромеханического тормоза 25 (фиг. 1).
Блоки 9. к 9.2 содержат элементу И 53 и ИЛИ 59 н 60 и ЗАПРЕТ 6i к 62, причем первые элелгенты ИЛИ 59, ЗАПРЕТ 61 и элемент И 58 сбедннены Госле.довател.ьво, выход элемента И 58 подключен к выходу блока и к входу второго элемента ЗАПРЕТ 6S Выход элемента. ЗАПРЕТ 62 соединен с одним из входов первого элемента ИЛИ 5Э, а его запретный вход соединен с вь ходо1 л второго элемента ИЛИ 60, вторые входы элементов И 58, ИЛИ 59, первьш и второй входы второго элемента ИЛИ 60 и запретный вход первого элемента ЗАПРЕТ 61 связаны соответственно с первым, вторым, третьи;л, четвертым и пятым входами блоке (фиг. 4).
Блоки 7.1 и 7.2 содержат элементы И 63 и 64, ИЛИ 65 и 66, НЕ 67, ЗАПРЕТ 68, причем первый элемент ИЛИ 65, г;ер8ЫЙ элемент И 63, второй элемент ИЛИ 66 элемент ЗАПРЕТ 68 и второй элемент И 64 соединены последовательно. Выход второго элемента И 64 соединен с выходом блока R с вторым входом второго элемента ИЛИ 66 выход элемента НЕ 67 соединен с вторым входом второго ;1лемента И 64, вход элекеита НЕ 67, второй вход первого элемента И 63, первый и в.торой входы первого элемента ИЛИ 65 и запретный вход элемента .ПРЕТ 68 связаны соответственно с первым йторым, третьим, четвертым и пятым входами блока (фиг. 5).
Устройство для управления перегрузочной тележкой распределительного конвейера работает следующим образом.
Руководствуясь данными информацион:1ого таблр 51, оператор имеет возможность ие:.а ледлительно реагировать на ход выполнения технологических операций на рабочих позициях и быстро управлять гру.-oiiOTOKOM согласно маршрутной технологи йс: ой карты.
Если, например, на информационном габ:10 51 включается сигнальный элемент 61, ::аи,о.ете.11ьствуюш.ий о завершении технолоплгеской операции по обработке партии изделий на первой рабочей позиции и имеется согласие на отгрузку их с площадки отпр.авленкя, то оператор обязан незамедли.гельас npHCjiBTb тележку к данной площадке. ,;,ог1усгим, тележка 26 находится напротив этой площадки, а значит и напротив площадли приема второй рабочей позиции следовательно, адресокоситель 55 находится во кзаимодействии с адресным датчиком i,2, ij результате чего на его выходе имеется шпнал, который через группу входов 1 блока о поступает на один из входов соответст :.у,огдего элемента И 56.2. Допустим, что при этом толкатели 31 механизма 33 перегрузки находятся в нижне.м опущенном поло i-:iii, следовательно упор 32 воздействует датчик 11.2 «Нижнего положения, а аиже включен задающий элемент 14.2 в г;:лультате чгго ка его выходе имеется сиг.ча;, который через группу входов 2 блока ;Б поступает на другой вход соответствуюius С элемента И 56.2. -Наличие .на входах ,пеглента И 56.2 одновременно двук сигнал.ср вы-зывает появление сигнала на его вы;;оде, который поступает через элемент ИЛИ 57 и выход блока 15 реализации адреса на. запрещающие входы i блоков 7.1 U 7.2 и разрещающие входы 1 блоков 9.1 и 9.2, а также поступает на входы элементов и БЗ и элементов НЕ 67 соответственно этик не блоков. Наличие сигнала на входе .элементов НЕ 67 приводит к пропаданию сягналов на их выходах и последовательному 11с ::езковению сигналов на входе элементов И 64 блоков 7.1 и 7.2, что исключает в такой ситуации возможность включения привода тележки. Наличие сигнала на одном из в.ходов элe ffeнтoв И 58 блоков 9.1 и 9.2 свидетельствует о возможности включения привода механизма перегрузки. Прежде чем приступить к операции перегрузки груза с площадки отправления на тележку, оператор проверяет правильность расположения толкателей 31, т.е. они должны находиться в нижнем опущенном положении. Для этого он нажимает на кнопку 17 «опрос, после чего на ее выходе появляется сигнал, который через пусковой блок 16, зажим 50, кронштейн 34, приводной щкив 38, тяговый токопроводящий орган 27 и зажим 49 поступает на входы датчиков «Верхнего 11.1 и «Нижнего 11.2 положений толкателей и на вход привода 19, который вкл1§чается и перемещает токосъемник 18, в резул.ьтате чего контактные щетки 18.1 -18.4 вступают во взаимодействие с соответствующими токопроводящими троллеями 21.1-21.4. После этого сигнал с выхода датчика 11.2 через контактную щетку 18.2 и токоподводящий троллей 21.2 поступает на сигнальный элемент 12.2 «Внизу, свидетельствующий о правильном расположении толкателей 31, а также сигнал поступает на третьи входы блоков 7.1. 7.2, 9.1 и 9.2 и на входы элементов ИЛИ 60 и 65. Наличие сигнала на входе элемента ИЛИ 60 вызывает появление сигнала на его выходе, который поступает на запрещающий вход элемента ЗАПРЕТ 62 и приводит к исчезновению сигнала на его выходе и на втором входе эл емента ИЛИ 59,что гарантирует разрыв самоблокирующих цепей управления блоков 9.1 и 9.2 и останов при- вода 24 при расположении толкателей 31 в верхнем или нижнем исходных положениях. Наличие сигнала на входе элемента ИЛИ 65 вызывает появление сигнала на его выходе, который поступает на второй вход элемента И 63, в результате чего подготавливается цепь пуска блоков 7.1 и 7.2 и дается разрещение на включение привода 22 тележки при расположении толкателей 31 в верхнем или нижнем исходных положениях. Убедившись в готовности всех механизмов к выполнению перегрузочных операций, оператор отпускает кнопку 17 «Опрос, на жимает на кнопку 10.1 и держит ее до тех пор, пока не погаснет сигнальный элемент 12.2 «Внизу. Сигнал от кнопки 10.1 поступает на пусковой блок 16 и полностью дублирует аналогично описанному действие сигнала кнопки 17 «Опрос. Кроме того, сигнал от кнопки 10.1 поступает на ,вход 2 блока 9.1 и на первый вход элемента ИЛИ 59, в результате чего на его выходе появляется сигнал, который через разрешающий вход элемента ЗАПРЕТ 61 поступает на второй вход элемента И 58. Появление одновременно двух сигналов на входах элемента И 58 вызывает появление сигнала на его выходе, который через токопроводящую троллею 21.4 и контактную щетку 18.4 поступает на соответствующие входы привода 24 и электромеханического тормоза 25. Электромеханический тормоз 25 освобождает приводной вал и привод 24 начинает вращать толкатели 31 механизма перегрузки по часовой стрелке. После освобождения датчика 11.2 от упора 32 исчезает сигнал на его выходе, а следовательноисчезает сигнал на входе сигнального элемента 12.2 «Внизу и он г аснет, оповещающий оператору о том, что можно отпустить кнопку 10.1 так как блок 9.1 стал на самоблокировку, потому что исчез сигнал на входах 3 и на входах элементов ИЛИ 60 и 65. Исчезновение сигнала на входе элемента ИЛИ 60 вызывает исчезновение сигнала на его выходе и на запрещающем входе элемеЕ та ЗАПРЕТ 62. В результате этого сигнал с выхода элемента И 58 через элемент ЗАПРЕТ 62 поступает на второй вход элемента ИЛИ 59 и ставит на самоблокировку блок 9.1, т.е. полностью дублирует действие выходного сигнала кнопки 10.1. Кроме того, .с выхода элемента И 58 блока 9.1 сигнал поступает на запретный вход элемента 9.2, исключающий возможность одновременного включения двух одного и того же привода, а также сигнал поступает на вход пускового блока 15, полностью дублирующий действие выходных сигналов кнопок 10.1 и 17, т.е. обеспечивается стабильность включения привода 19 токосъемника на время осуществления перегрузочной операции. Исчезновение сигнала на входе эле.мента ИЛИ 65 приводит к исчезновению сигнала на его выходе и на втором входе элемента И 63, что исключает возможность включения блоков 7.1 и 7.2 привода тележки. Толкатели 31 по ходу вращения захватывают конвейер с обработанными изделиями на площадке отправления первой рабочей позиции и перемещают его на тележку 26. При /достижении толкателей 31 верх-него положения и при правильном расположении контейнера на тележке упор 32 взаимодействует с датчиком 11.1, в результате чего на его выходе появляется сигнал, который через щетку-18.1 и троллей 21.1 поступает на вход сигнального элемента 12.1 «Вверху, оповещающего о завершении перегрузочной операции, а также поступает на запрещающие входы 4 блоков .1 и 9.2, на разрешающие входы блоков 7.1 и 7.2 и на вторые входы элементов ИЛИ 60 и 65. Появление сигнала на входе элемента ЛИ 60 вызывает также появление сигнала а его выходе и на запретном входе элемена ЗАПРЕТ 62, в результате чего исчезает игнал на его выходе.и последовательно исчезают сигналы на выходах элементов ИЛИ 59, ЗАПРЕТ , И 58 и ИЛИ 16, а также исчезают сигналы на входах приводов 19 и 24 и электромеханическом TODмозе 25, а следовательно, мег анизм 33 перегрузки останавливается сзоезременко и его приводной вал становится на тормоз. Также отключается привод. 19 ч токосъемник под действием пружин 20 возвраш,ается в исходное нерабочее положение, после чего разрывается контакт между щетками 8.i .4 и токоподводящими троллеями 21.1-21.4. На этом цикл перегрузки завершагтся. После этого оператор по технологической карте определяет рабочую позицию, З которую необходимо отправить данные изделия для выполнения последующей технологической, операции, например необходимо отправить на рабочую позицию п. Оператор, убедиошись на информационном табло о том, что приемная nOFua;U;a гпбочей позиции п свободна (так как на выходе датчика 2.п отсутствия грузз нмеетс:л сигнал, поступаклцик на вход скгняльного элемента о.п, который рклю:: етсл к оповещает о запросе полуфабрикатов), БКЛЮЧЕСТ задающий элемент 14.п и пвтоматическя отключается задающий йлемент М.2 в результате чего Б блоке Ш реализации a;iperj исчезает сигнал па втором 1зходе злзме1гга И 56.2 и последовательно исчезают сигия,пгл на его выходе, на злем-З/та ИЛЯ 57, на разрешающих входах 1 б.поков 9.1 и 9.2 и на запрешающих входах 1 исполнительны ; блоков 7.) и 7.2, а также иоявлрется сигнал на втором входе элемента Н Бб.п. однако. на его выходе сигнала нгт, тзч как отсутствует сигнал HP его первом зходе, по:с ;;у что адресоносите,яь 55 тележки в момент не находится ао взгимодгистуни с адресньш датчиком 1.п. Отсутс В е -сигиа;-а на входах 1 блоков 7.1 и 7.S и на вхо, соответствующих элементггв И ;;3 исклгс га -т возможность включения пншг)дг мслпиязуз перегрузки.
Отсутствие сигнала на запрсщаюогик
входах 1 б.цОКОВ 7.1 Н 7.2 ЕЫЗЫВЭ7Т ПОГ;гъ;;:;м;ио
сигналов а входах соответспч ;о и - х л.p ментов НЕ 67 г па ( ч
нтов И 64, тем caMv.iM оЗеспеможность включения приводг
Убе. в готовности тележк
лению, оператор нажимает на i
в результате чего на ее выхо.п.с
сигнал, который поступает на FX
вход пускового блока 15, В ре ультнге
на его выходе появ.;1яется CHr;i ,n, sor
ющий на вход дятчика П. i-i -.з вхо,
вода 19, при этом контактные
токопсушодян ими троллеями- 21.1У.4
а сигнал с выходя датчика П.1 поступае; аналогично описанному вход сигнальногс
элемента 12.1, оповещающий правильное расположение толкателей 31, а также сигнал поступает на запрещающие входы 4 блоков 9.1 и 9.2, на разрещающие входы блоков 7.1 и 7.2 и на вторые входы соответствующих элементов .ИЛИ 65.
Наличие сигнала на одном из входовэлемента ИЛИ 65 блока 7.1 вызывает также появление сигнала на его выходе и на втором входе элемента И 63. Наличие на входах элемента И 63 одновре.менно двух сигналов вр 1зы0ает появление сигнала на его выходе, на выходе элементов ИЛИ 66, ЗАПР ЕТ 68, И 64, а также на соответствующих входах электромеханического тормоза 23 и привода 22. Электромеханический тормоз 23 освобождает приводной вал 30, а привод 22 посредством приводного щкива 28 и тягоЬого токопроводяи его органа 27 начинает гтеремещать грузонесущую тележку 26 «Вперед в сторону пункта назкачеиия.
После этого оператор освобождает, кнопку 8... при .этом на ее выходе и последовате.пьио на выходах пускового блока 16, датчика 11.1, на входе привода 19 исчезают сигналы -и токосъемник 18 под действием пружин 20 возвраш,ается в- исходное нерабочее положение, отсоединяя контактные щетки 18. -- 8.4 от токоподводящих троллей 21.-21.4 . Однако грузонесущая тележка 26 продолжает двигаться к пункту назначения, так как сигнал с выхода элемента И 64 постунает на второй вход элемента ИЛР 66 и полностью дублирует действия выходного сигнала кнопки 8.1 и устагавливает на самоблокировку исполнительный блок 7.1. Кроме того, сигнал с выхода блока 7.1 постугЕает на вход 5 исполнительного блока 7.2, исключающий возможность включения одновременно блоков одного и того )ке привода. При прибытии грузонесупдей тележки 26 в ггупкт назначения адресонхмсктель 55 взаимодействует с адресным датчиком 1.П, в результате чего на его выходе появляется сигнал, который посту ает на первый вход элемента И 56.п блока 15 реализации a.;i.peca.
Наличие на входах элемента И 56.п эд.иозременно двух сигналов вызывает также лоясление на еГо выходе, на выходе элемента ИЛИ 57, на выходе-блока 15, ш входах 1 блоков 9.1 и 9.2, на запреща юудих входах 1 блоков 7.1 и 7.2. Наличие сигнала на входе I блока 7.1 и на входе элемента НЕ 67 вызывает исчезновение сигналов на его выходе, и последовательное исчезновение сигналов на выходе элемента И 64, а также на.входах привода 22 и электромеханического тормоза 23, в результате чего тележка 26 останавливается напротив приемной площадки рабочей позиции п, а призоднон вал 30 становится на тормоз. Наличие сигнзлов на разрешающих
входах 1 блоков 9.1 и 9.2 и на одном из входов соответствующих элементов И 58 обеспечивает возможность включения привода механизма перегрузки.
Оператор, определив направление разгрузки контейнера, нажимает кнопку 10.2, в .результате чего на ее выходе появляется сигнал, который аналогично описанному дает возможность на включение привода токосъемника через тяговый токопроводящий орган и включение привода механизма перегрузки. Толкатели 31 начинают вращаться против часовой стрелки и перемещают контейнер с полуфабрикатами на
приемную площадку рабочей позиции п. После завершении перегрузочной операции толкатели 31 устанавливаются в нижнем положении, упор 32 воздействует на датчик 11.2, а контейнер взаимодействует с датчиком 2.П отсутствия груза, который дает команду на отключение сигнального элемента 5.П на информационном табло, свидетельствующем о завершении цикла доставки груза в пункт назначения.
Тележка подготовлена к выполнению операций по разгрузке площадок отправления. Дальше все выполняется аналогично описанному.
56jirHi
TT1. f
А.„.,„„™„.
,.L
1, :k Д
2 20 „„.,J
Вид Б
Фиг.9
Фиг.П
А-А
35
Фиг. Л
| КОНВЕЙЕР ДЛЯ ДОСТАВКИ ИЗДЕЛИЙ К РАБОЧИМ МЕСТАМ | 0 |
|
SU306066A1 |
| Разборное приспособление для накатки на рельсы сошедших с них колес подвижного состава | 1920 |
|
SU65A1 |
| Загрузочно-разгрузочное устройство | 1973 |
|
SU512137A1 |
| Разборное приспособление для накатки на рельсы сошедших с них колес подвижного состава | 1920 |
|
SU65A1 |
