Изобретение относится к автоматизации управления очистными комплексами в горной промьгашенности, а иг1енно к способам автоматизированного контроля взаимного пространственного положения элементов очистного комплекса и автоматизированного управления перемещением комплекса в плоскости угольного пласта.
Целью изобретения является повьше- ние надежности за счет прогнозирова- ния и парирования столкновений исполнительных органов комбайна с верхняками секций крепи.
Управление очистным комбайном тигается через контроль положения элементов комплекса в плоскости простирания пласта и в профильной плоскости
пласта. ,Нпя этого применяется трехмерная система координат, позволяющая сравнивать размещение лруг относительно друга верхняков крепи и исполнитель- ных органов комбайна. При этом из-за изменения горно-геологических и горнотехнических условий эксплуатации очистных комплексов при их перемещении возникают угловые отклонения, различные на каждом выемочном цикле и различные дпя основания секции крепи, верх- няка секн;ии крепи, гидростоек и гидродомкратов передвижки крепи, рештаков конвейера. Измерение этих угло- вых параметров, а также величины вы- движки штоков гидродомкрата передвижки и гидростойки секций крепи, позволяет точно отояществлять как по длине лавы, так и по подвиганию забоя поло- жение верхняков каждой секции крепи, наиболее приближающихся к испольни-: тельным органам очистного комбайна. Одновременно с контролем угловых параметров определяется траектория резания пласта исполнительными органами комбайна при его прохождении вдоль лавы по каждому рештаку. При этом учитывается тот факт что гидросистема управления штоскопа- раллельным смещением исполнительных (режущих) органов комбайна в силу присущей ей инерционности не может отработать достаточно быстро внезапные пространственные изменения положения комбайна. Это обосновывает измерение известными методами и линейных параметров комбайна -и его частей только при переходе опор комбайна с одного рештака на другой. Таким обра- зом, определяются координаты траектории резания угольного пласта в моменты перехода опор комбайна с рештака на рештак с учетом характера укладки забойного конвейера, т.е. углов рас- положения в пространстве рештаков конвейера. Так как каждая точка траектории резания может быть соотнесена к соответствующему рештаку и секции кре ци в трехмерной системе координат, то в этой системе рассматривается прохождение траектории резания и расположение верхняков секций крепи. Пр и этом
для упрощения оценивается взаимное по ложение забойного края верхняков и за вальной точки траектории резания, учитывая то, что они являются ближайшими элементами расположения крепи и исполнительных органов комбайна дру
Qг Q 5 Q .„
5
50
относительно друга. Сравнение по подвиганию забоя (ординат) и по высоте (аппликат) края верхняка и траектории резания при одинаковом для них положении по длине лавы (абсциссе) идентифицирует наличие или отсутствие столкновения данного верхняка с конкретным участком траектории резания, т.е. с исполнительным органом комбайна. Разность ординат для них определяет величину необходимого отклонения для парирования данного отказа. В силу большей унификации операций управления Для различных горно-геологических, горно-технических и технологических условий более предпочтительным при прогнозе отказа и его париро- вании является предварительное отодвигание соответствующих секций крепи на ранее определенную величину разности ординат. Выполнение цели управления завершается вьщвижкой секции кре- .пи в первоначальное положение, что соответствует условию поддержания технологического процесса- добычи угля.
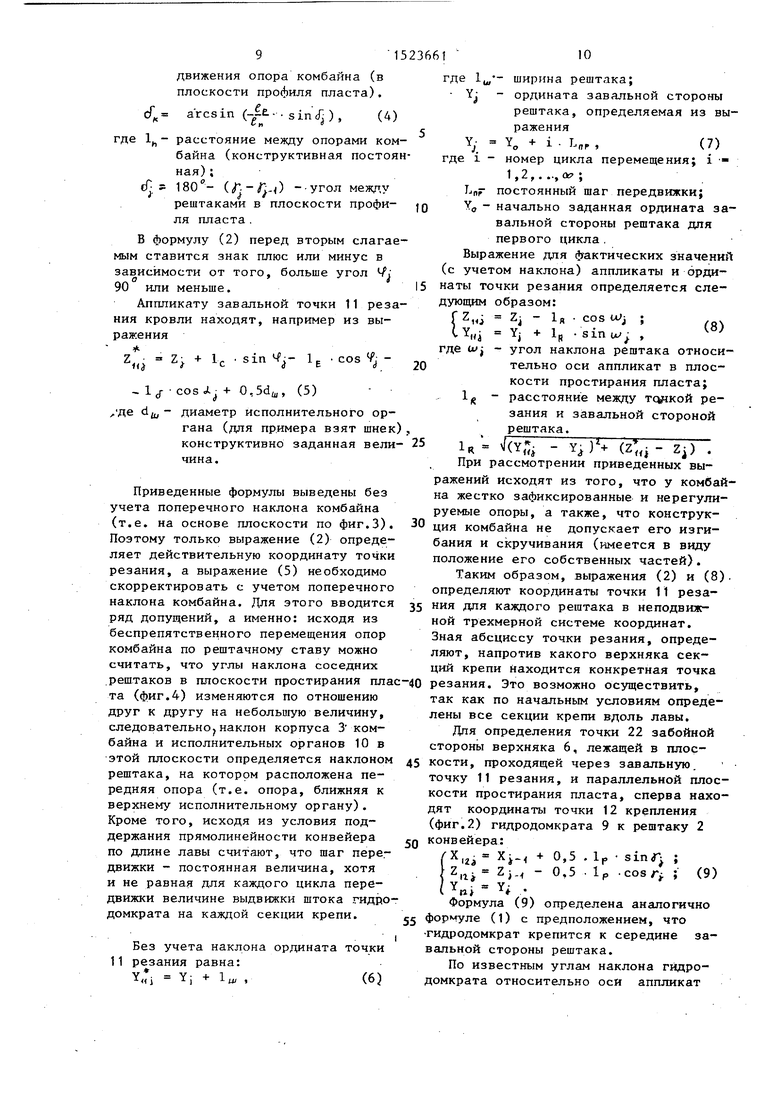
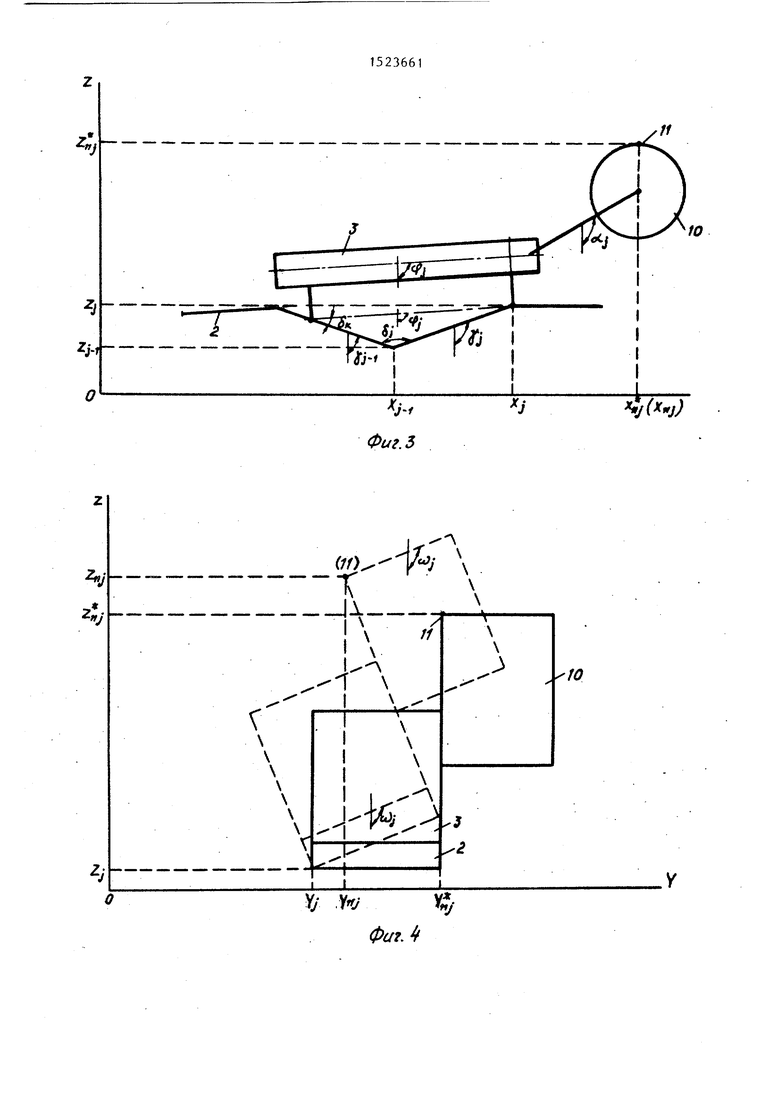
На фиг.1 представлены крепь, конвейер и комбайн в плоскости простира,- ния угольного пласта при нёнаклоненном положении комбайна относительно крепи и при наклоненном (штрихпунктир); на фиг.2 -части секции крепи с соответствующим рештаком конвейера, в трехмерном пространстве; на фиг.З -рештач- ный став и комбайн с исполнительным органом, режущим кровлю, в плоскости профиля пласта; на фиг.4 - конвейер и комбайн в .плоскости простирания пласта в положении без наклона и с наклоном; на фиг.З - функциональная
схема системы управления, реализующей предлагаемый способ управления очистным комплексом.
Очистной комплекс располагается в выработанном пространстве угольного пласта и состоит из следующих элементов (фиг.1-4): секция 1 крепи, рештач- ный став (рештак) 2 забойного конвейера, корпус 3 очистного комбайна, кровля 4 пласта, почва 5.пласта, верхняк 6 секции крепи, основание 7 секции 1 крепи, гидростойка 8 секции 1 крепи, гидродомкрат 9 передвижки, исполни- . тельный орган 10 комбайна, отрабатывающий кровлю, завальная точка 11 резания кровли исполнительным органом 10 комбайна. На фиг.2 обозначены: точка 12 присоединения гидродомкрата 10 к рештаку 2 конвейера, точка 13 присоединения гидродомкрата 9 к основанию 7 секции 1 крепи, точка 14 присоединения гидростойки 8 к основанию 7 секции 1 крепи, точка 15 присоединения гидростойки 8 к верхняку 6 секции 1 крепи, угловые точки 16 и 17 забойной стороны верхняка 6 секции 1 крепи, угловые точки 18 и 19 завальной стороны рештака 2, угловые точки 20 Q и 21 забойной стороны рештака 2, точка 22 верхняка 6, полученная пересечением забойной стороны верхняка с плоскостью, проходящей через точку 11 репласта без учета наклона, Y, - фактические координаты завальной точки 1 1 резания в плоскости простирания пласта (с учетом наклона), Yj и Z - координаты угловых точек 18 и 19 завальной стороны рештака.
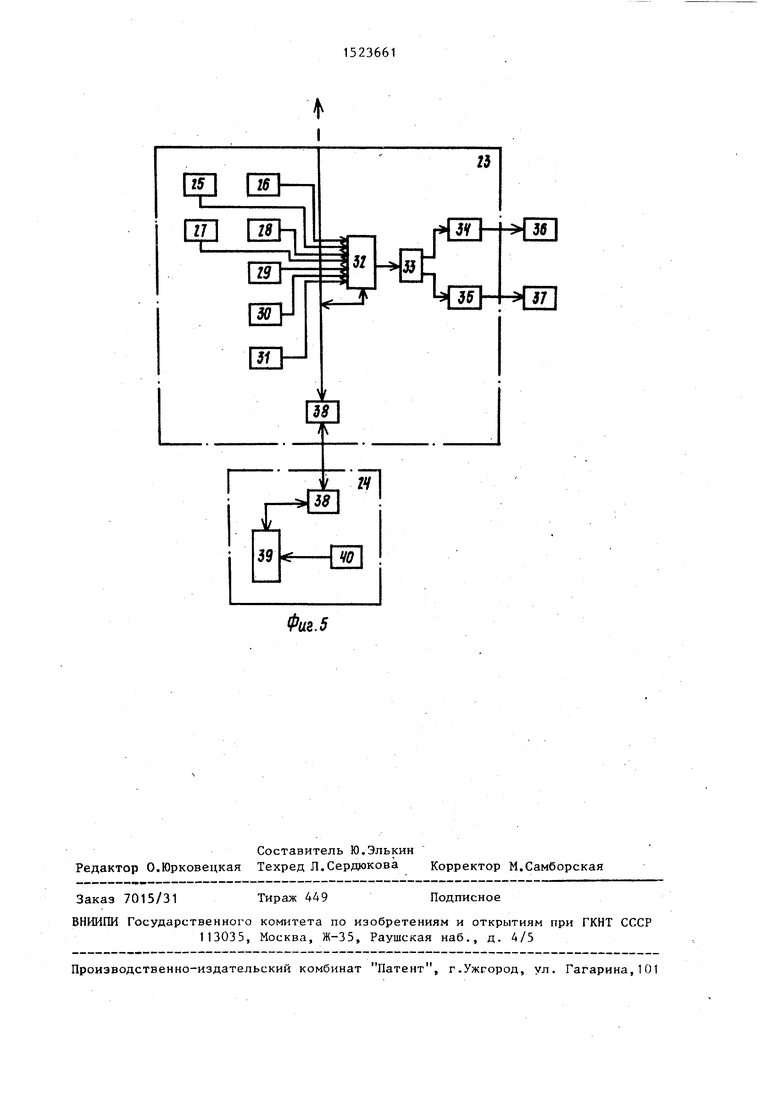
Система управления очистным комплексом (фиг.5) состоит из лавных блоков 23 и штрекового блока 24. Лавные блоки 23 одинаковы для всех секций крепи на которых они устанавливаются. Лавный блок 23. содержит датчик 25 величины вьщвижки штока гидродомкрарата относительно оси аппликат в плоскости профиля пласти и в плоскости простирания пласта, датчик 27 величи- ны выдвижки штока гидростойки, датчик
зания кровли, угол Л наклона основа- |5 та,датчик 26 угла наклона гидродомк- ния секции крепи относительно оси аппликат (безотносительно к плоскостям профиля и простирания пласта) ,, угол / наклона гидродомкрата передвижки
относительно оси аппликат (безотноси 20 28 угла наклона гидростойки относительно к плоскостям профиля и прости- тельно оси аппликат в плоскости профи- рания пласта), угол О наклона гидростойки относительно оси аппликат (безотносительно к плоскостям профиля и простирания пласта), угол 6 наклона верхняка секции крепи относительно оси аппликат (безотносительно к плоскостям профиля и простирания пласта) , угол и наклона рештака конвейеля пласта и в плоскости простирания пласта, датчик 29 угла наклона основания секции крепи относительно оси 25 апгшикат в плоскости профиля пласта и в плоскости простирания пласта, датчик 30 угла наклона верхняка секции крепи относительно оси аппликат в плоскости профиля пласта и в плоскоспласта без учета наклона, Y, - фактические координаты завальной точки 1 1 резания в плоскости простирания пласта (с учетом наклона), Yj и Z - координаты угловых точек 18 и 19 завальной стороны рештака.
Система управления очистным комплексом (фиг.5) состоит из лавных блоков 23 и штрекового блока 24. Лавные блоки 23 одинаковы для всех секций крепи на которых они устанавливаются. Лавный блок 23. содержит датчик 25 величины вьщвижки штока гидродомкрарата относительно оси аппликат в плоскости профиля пласти и в плоскости простирания пласта, датчик 27 величи- ны выдвижки штока гидростойки, датчик
та,датчик 26 угла наклона гидродомк-
28 угла наклона гидростойки относительно оси аппликат в плоскости профи-
28 угла наклона гидростойки относительно оси аппликат в плоскости профи-
ля пласта и в плоскости простирания пласта, датчик 29 угла наклона основания секции крепи относительно оси апгшикат в плоскости профиля пласта и в плоскости простирания пласта, датчик 30 угла наклона верхняка секции крепи относительно оси аппликат в плоскости профиля пласта и в плоскос
Изобретение относится к горному делу и предназначено для автоматизации управления очистными комплексами путем контроля и управления положением элементов комплекса. Цель изобретения - повышение надежности управления за счет прогнозирования и парирования столкновений исполнительных органов комбайна с верхняками /В/ секций крепи. Для определения положения в пространстве В секций крепи и верхнего исполнительного органа комбайна используют неподвижную трехмерную систему координат. С помощью датчиков измеряют углы наклона гидродомкратов передвижки секций крепи, гидростоек, В и оснований секций крепи, рештаков конвейера. Зная конструктивные размеры и углы наклона элементов комплекса и измерив выдвижку штоков гидростоек, однозначно определяют по всей длине лавы координаты завальной точки резания кровли исполнительного органа и соответствующей ближней к забою точки В. По этим координатам прогнозируется столкновение исполнительного органа с В. Для парирования столкновения соответствующую секцию крепи отодвигают от забоя. После прохождения исполнительным органом комбайна этой секции крепи ее выдвигают в первоначальное положение. Управление комплексом осуществляется лавным и штрековым блоками управления, состоящими из датчиков измерения углов и перемещений микроЭВМ и электрогидроклапанов гидростоек и гидродомкратов передвижки. МикроЭВМ по известной программе определяют координаты завальных точек резания кровли и забойных точек В и выдают управляющие сигналы на электрогидроклапаны для передвижки крепи. 5 ил.
ра относительно оси аппликат в плос- 0 простирания пласта, датчик 31 угла кости простирания пласта,.На фиг, 3 обозначены: (П и f - углы наклона относительно оси аппликат в плоскости профиля пласта текущего и предыдущего рештаков. Ч : - расчетный угол продольного наклона комбайна, i угол наклона поворотного редуктора исполнительного органа относительно оси аппликат, cQ - расчетный угол между рештаками в плоскости профиля пласта, с - расчетный угол между прямой, соединяющей опоры комбайна, и рештаком, на который опирается задняя по ходу движения опора комбайна, в плоскости профиля пласта, Х и - координаты точки соединения текущего и последующего рештаков в плоскости профиля пласта, Х;, -i координаты точки соединения текущего и пре35
40
наклона рештака относительно оси аппликат в полоскости простирания пласта, а также в плоскости профиля плас та, микро-ЭВМ 32, выполняющую необхо- димые вычисления и выдающую управляющие сигналы на другие узлы блока: через буферный усилитель 33 на электро- гидроклапаны 34 и 35 гидростоек крепн и гидродомкратов передвижки соответственно, посредством которых управляют исполнительными механизмами 36 и 37 гидростойки и гидродомкрата - соответственно, Чтрековый 24 и лав- ный 23. блоки содержат телемеханичес- де кие модули 38 связи для поддержания информационного обмена между микро-. ЭВМ.
Штрековь1й блок 24 содержит такую же, как ив лавном блоке 23, микродьщущего рештаков в плоскости профи- л ЭВМ 39 и пульт 40 управления и ввода
ля пласта, Х, или Х.,, и -расчетные координаты завальной точки 11 резания кровли в плоскости профиля пласта. На фиг.4 обозначены: - угол наклона комбайна на j-м рештаке относительно оси аппликат в плоско.с- ти простирания пласта, Y , Z, - координаты (расчетные) завальной точки 11 резания в плоскости простирания
55
исходных данных о пространственном положении комплекса.
Способ реализуется следующим обра- зом.
Перед началом работы в произвольном месте, например на завальной стороне крайней со стороны откаточного штрека секции крепи, задают через пульт 40 управления (фиг,5) нача простирания пласта, датчик 31 угла
наклона рештака относительно оси аппликат в полоскости простирания пласта, а также в плоскости профиля плас та, микро-ЭВМ 32, выполняющую необхо- димые вычисления и выдающую управляющие сигналы на другие узлы блока: через буферный усилитель 33 на электро- гидроклапаны 34 и 35 гидростоек крепн и гидродомкратов передвижки соответственно, посредством которых управляют исполнительными механизмами 36 и 37 гидростойки и гидродомкрата - соответственно, Чтрековый 24 и лав- ный 23. блоки содержат телемеханичес- кие модули 38 связи для поддержания информационного обмена между микро-. ЭВМ.
Штрековь1й блок 24 содержит такую же, как ив лавном блоке 23, микро5
исходных данных о пространственном положении комплекса.
Способ реализуется следующим обра- зом.
Перед началом работы в произвольном месте, например на завальной стороне крайней со стороны откаточного штрека секции крепи, задают через пульт 40 управления (фиг,5) начало отсчета неподвижной трехмерной системы координат. Через тот же пульт 40 вводят в штрековую 39 и лавные 32 микро-ЭВМ первоначальные данные о шаге передвижки, интервале расстановки по лаве секций крепи, конструктивных постоянных комплексов и об угле о наклона поворотного редуктора исполнительного органа комбайна относительно оси аппликат для каждого рештака конвейера (этот угол известен из условия программного управления комбайна по образцовому циклу). а также только для первой лавной микро-ЭВМ 32 вводят значения абсциссы и аппликаты для ближней кштреку боковой стороне первого рештака. Таким же образом для первого выемочного цикла задают значение ординаты завальной стороны конвейера (предполагается, что выполняется условие поддержания прямолинейности реш- тачного става по длине лавы, поэтому все точки завальной стороны каждого рештака будут иметь одинаковое значение ординаты).
Для каждой секции крепи посредством датчика 26,28,29 и 30 соответственно угла/ -наклона гидродомкрата, угла Q. наклона гидростойки,угла Я наклона основания секции крепи и угла наклона верхняка секции крепи измеряют величины этих углов относительно оси аппликат в плоскости профиля и плоскости простирания пласта. Затем датчиками 25 и 27 выдвижки штока гидродомкрата и гидростойки измеряют величину этих дыдвижек. Результаты измерений заносят в микроэвм 32 соответствующей секции крепи. Затем вручную или посредством измерительной тележки, прогоняемой вдоль лавы по конвейеру, измеряют углы ш «аклона рештаков конвейера относительно оси аппликат в плоскости простирания пласта и углы г наклона рештаков в плоскости профиля пласта. Через узел ввода данных информацию заносят (С помощью штрековой микро-ЭВК 39 и модулей 38 связи в соответст6уиБ1ие
лавные микро-ЭВМ 32.
, 1
Каждая лавная микро-ЭВМ 32 вычисляет координаты соответствующей ей завальной точки 11 резания кровли исполнительными органами 10 комбайна и координаты точки 22 забойной стороны верхняка 6 секции крепи 1. Вычисления проводятся, например в следующей последовательности. Находят аппликату и абсциссу узла соединения данного рештака с последующим по формулам
Г Xj Х,, +sin«n.lp
(1)
5
0
5
0
5
0
5
0
где X.f
и Z.
абсцисса и аппликата узла соединения данного рештака и предыдущего (для первого рештака они определены ранее) , j 1,2,...,m, (m - количество рештаков); угол наклона рештака относительно оси аппликат в плоскости профиля пласта ; длина рештака. Затем находят абсциссу завальной точки резания кровли I
Х„; X,,. X: + 1. . COS 1/; +
Г; . «)
И
sin 4, +
7
sin J- , (2)
. р OJ1.4 II, л. - OJ.lt 1 ,
.где Ij.- конструктивная постоянная величина между перпендикулярами от передней по ходу опоры комбайна и геометрическим центром опоры поворотного ре- дуктора верхнего исполнительного органа;
дпина проекции на ось, параллельную корпусу комбайна, рас- стояния между передней опорой и геометрическим центром опоры поворотного редуктора верхнего (и одновременно переднего) испольнительного органа;
1у - длина прямой, соединяющей геометрические центры исполнительного органа и опоры rtoso- ротного редуктора; угол наклона поворотного редуктора относительно оси аппликат (определяется ранее из образцового цикла); I
Ч - угол продольного наклона комбайна, определяек ый из выражения
(3)
«L; П.
где fj-f- угол наклона предьщущёго рештака относительно оси аппликат в плоскости профиля пласта;
расчетный угол между прямой, соединяющей опоры комбайна, и предыдущим рештаком, на кЬто- рый опирается задняя по ходу
движения опора комбайна (в плоскости профиля пласта),
arcs in (-Е- S in J; ) ,
Си
где расстояние между опорами комбайна (конструктивная постоянная) ;
сГ, S (/ . - ) - угол между рештаками в плоскости профиля пласта .
В формулу (2) перед вторым слагаемым ставится знак плюс или минус в зависимости от того, больше угол 90 или меньше.
Аппликату завальной точки 11 резания кровли находят, например из выражения1.
U
z.
+ 1,
sin
1, .cosV 1 + 0,5d, (5)
де - диаметр исполнительного органа (для примера взят шнек), конструктивно заданная вели- 25 чина.
Приведенные формулы выведены без учета поперечного наклона комбайна (т.е. на основе плоскости по фиг.З). Поэтому только выражение (2) определяет действительную координату точки резания, а выражение (5) необходимо скорректировать с учетом поперечного наклона комбайна. Для этого вводится ряд допущений, а именно: исходя из беспрепятственного перемещения опор комбайна по рештачному ставу можно считать, что углы наклона соседних
рештаков в плоскости простирания плас-40 резания. Это возможно осуществить.
та (фиг.4) изменяются по отношению друг к другу на небольшую величину, следовательно наклон корпуса 3 комбайна и исполнительных органов 10 в
так как по начальным условиям опред лены все секции крепи вдоль лавы.
Лпя определения точки 22 забойно стороны верхняка 6, лежащей в плосэтой плоскости определяется наклоном 45 кости, проходящей через завальную.
точку 11 резания, и параллельной плос кости простирания пласта, сперва нахо дят координаты точки 12 крепления (фиг.2) гидродомкрата 9 к рештаку 2 50 конвейера:
+ 0,5 . 1р sini ;
2,, - 0,5 . 1р -cos п. ; (9)
} Z
IZi
рештака, на котором расположена передняя опора (т.е. опора, ближняя к верхнему исполнительному органу). Кроме того, исходя из условия поддержания прямолинейности конвейера по длине лавы считают, что шаг передвижки - постоянная величина, хотя и не равная для каждого цикла передвижки величине выдвижки штока гидродомкрата на каждой секции крепи. формуле (1) с предположением, что
I -гидродомкрат крепится к середине заБез учета наклона ордината точки вальной стороны рештака. 11 резания равна:По известным углам наклона гйдроП) vr,-/-ip- cos г. ; Y, Y Формула (9) определена аналогично
Y.
П
Yi + 123661
где Y;
:
где 1 10
ширина рештака; ордината завальной стороны рештака, определяемая из выраженияY, + i . .„. ,(7)
10
O - ПР
номер цикла перемещения; i 1,2,...,
LnF постоянный шаг передвижки; YO - начально заданная ордината завальной стороны рештака для первого цикла.
Выражение для фактических значений (с учетом наклона) аппликаты и ординаты точки резания определяется следующим образом:
-nj
Zj 1я+ 1.
cos j sin (ju
(8)
0
5
1 ХИ -OJ-lllAXi ,
где tfj - угол наклона рештака относительно оси аппликат в плоскости простирания пласта; 1 - расстояние между тонкой резания и завальной стороной рештака.
1/ ( - Y)4 (z;,i- zp .
При рассмотрении приведенных выражений исходят из того, что у комбайна жестко зафиксированные и нерегулируемые опоры, а также, что конструкция комбайна не допускает его изгибания и скручивания (имеется в виду положение его собственных частей).
Таким образом, выражения (2) и (8). определяют координаты точки 11 реза- 5 ния для каждого рештака в неподвижной трехмерной системе координат. Зная абсциссу точки резания, определяют, напротив какого верхняка секций крепи находится конкретная точка
0
так как по начальным условиям определены все секции крепи вдоль лавы.
Лпя определения точки 22 забойной стороны верхняка 6, лежащей в плосточку 11 резания, и параллельной плоскости простирания пласта, сперва находят координаты точки 12 крепления (фиг.2) гидродомкрата 9 к рештаку 2 конвейера:
+ 0,5 . 1р sini ;
2,, - 0,5 . 1р -cos п. ; (9)
} Z
IZi
формуле (1) с предположением, что
П) vr,-/-ip- cos г. ; Y, Y Формула (9) определена аналогично
(6)
домкрата относительно оси аппликат
в плоскости профиля и простирания пласта, измеренным датчиком 26, и ве- личе выдвижки штока гидродомкрата, определенной датчиком 25, получают координаты узла крепления (точка 13) гидродомкрата 9 к основанию секции крепи:
X,.: Хц + k . sinjujx
Y,ij- k . cos.,. (10) 10
(3i
I 3;
Z/3 Zl2j ± kj СОБуд ,
rj / Л +cosVj,tgVi, - коэффициент ( - длина всего гидродомкрата передвижки с учетом цилиндра и штока на данном цикле);
уг ол наклона гидродомкрата относительно оси аппликат в плоскости профиля пласта; jU.j,y- угол наклона гидродомкрата 20 относительно оси аппликат в плоскости простирания пласта. По известным углам наклона основания секции крепи относительно оси аппликат в. плоскости профиля и прости-. 25 рания пласта, измеренным датчиком 29, получают координаты узла крепления (точка 1А) гидростойки к основанию секции крепи:
Х, Х,з ± k. . sin 2,;
30
%j i) г - со8Д,Ь8л,; 3 ± kt . созЛгл,
(11)
Z,/; Z,ii t ki . cos Л
где kj Irr- / Vl + cos Л2,.iJ -кoэф- фидиент (ltr конструктивная . постоянная, равная расстоянию35 между узлами крепления к основанию секции крепи гидродомкрата и гидростойки); Я угол наклона основания секции
крепи относительно оси аппли- 40 кат в плоскости профиля плас- та;:
УГ ол наклона основания секции крепи относительно оси аппликат в плоскости простирания 45 пласта.
По известным углам наклона гидростойки относительно оси аппликат в плоскости профиля и простирания пласта, измеренным датчиком 28, и вели- 50 чине выдвижки штока гидростойки, определенной датчиком 27, получ(ают координаты узла крепления (точка 15) гидростойки к верхняку секции крепи;
55 Г X,5i XMjt kj .sinS,;
Y,,, ± k, .cos0,,tg6),; (12) (. Z/ri ZMJ + k) cosPax, где k lr-cj/ 1 + , .J кoэф0
0 5
0
5
0
5
0
5
фициент (Irci - длина всей гидростойки);
угол наклона гидростойки относительно оси аппликат в плоскости профиля пласта; 02У угол наклона гидростойки относительно оси аппликат в плоскости простирания пласта. По известным углам наклона верхня- ка секции крепи относительно оси аппликат в плоскости профиля пласта и простирания пласта, измеренным датчиком 30. получают координаты угловых точек 16 и 17 забойной стороны верх- няка:
f m /л± k.sin,,; ) Y,/ Y,i+ k .cos..tgf,,; (13) 7j 2,,,t k, .
X/6i si- Y/.j Y,jj+ k.cos6,,.tg,; (14) Z/6 Z,fjt .,, где k 1 /VI + cos,tgie.,- коэффициент (1 - расстояние от точки 15 до 17, конструктивная постоянная);
k 1 //1 + cos,tg 62-кoэффици- ент (l5 расстояние от точ- ки 15 до точки 16, конструктивная постоянная); fff угол наклона верхняка секции крепи относительно оси аппликат в плоскости профиля пласта;
jry- угол наклона верхняка секции крепи относительно оси аппликат в плоскости простирания пласта.
Таким образом, забойная сторона верхняка секций крепи определяется как прямая с точками 16 и 17. Плоскость, параллельная плоскости простирания пласта, пересекает эту прямую, а точка 22 пересечения имеет уже определенную ранее абсциссу, совпадаю- 1цую с абсциссой завальной точки резания кровли исполнительным органом и вычисляемую по выражению (2).
Ордината и абсцисса точки 22 верхняка равны ( Х22) Х„ ):
Y :ШliI2 Iг J(.J +у
X,,i-X,
Z ( XjiL J-(Zjti. 1+Zn;.- Zi Y -V .tyy
16 irt,s)
Таким образом, по формулам (2) и
(8) определяют координаты завальной точки 11 резания для каждого рештака, а по формулам (2) и (15) - координаты
i31523661
соответствующей точки 22 верхняка на забойной стороне секции крепи.
Затем для каждой пары точек провота точки 22 верхняка окажется больше, чем у точки 11 резания, тосравнивают их аппликаты, и, если аппликата точки 22 верхняка окажется меньше, чему точки 11 резания, то идентифицируется столк-|0 вейера относительно оси аппликат в
новение. Если эти условия не выполняются, то управление комплексом, отличное от технологически заданного, не производится. Если же идентифицируется столкновение, то применяя формулы (8) и (IS), находят разность между ординатами точки 22 верхняка и точки 11 резания. После этого под управлением микро-ЭВМ 32, воздействуя на узплоскости профиля пласта, отличающийся тем, что,с целью по вышения надежности за счет прогнози рования и парирования столкновений 5 исполнительных органов комбайна с
верхняками секций крепи, задают тре мерную систему координат, измеряют углы наклона гидродомкратов передви ки относительно оси аппликат в пло
лы 33-37 (воздействие согласно техно- 20 кости профиля пласта и в плоскости
25
30
35
логии перемещения секции крепи), отодвигают секцию 1 крепи в сторону завала на полученную величину разности и тем самым выводят секцию из зоны столкновения с режущими органами 10. После прохождения органов 10 комбайна мимо секции крепи последнюю выдвигают в первоначальное положение для улучшенного поддержания кровли над рабо- : чим пространством.
В качестве датчиков угла наклона гидродомкрата, гидростойки, основания секции крепи и верхняка секции крепи относительно оси аппликат в плоскости профиля пласта и плоскости простирания пласта могут применяться компенсационные емкостные измерители угла отклонения от вертикали, Дат- . чиком зыдвижки штока гидродомкрата и гидростойки может быть датчик.на базе п ультразвукового преобразователя. Датчиком угла наклона рештака относительно оси аппликат может быть либо емкостной датчик, либо может применяться измерительная тележка. Буферными усилителями и электрогидроклапанами могут служить известные устройства, применяемые в шахтных условиях. В качестве телемеханических модулей связи могут использоваться системы с распре-; делительным избираиием лавных блоков., и временным разделением каналов пере- дачи информации. В качестве микро-ЭВМ и пульта управления могут использоваться любые устройства с искробезопас- ными цепями. Формула изобретения
Способ управления очистным комплексом, основанный на измерении ПУТИ,
45
50
55
простирания пласта, измеряют углы наклона оснований секций крепи отно сительно оси аппликат в плоскости профиля пласта и в плоскости прости рания пласта, измеряют углы наклона верхняков секций крепи относительно оси аппликат в плоскости профиля пл та и в плоскости простирания пласта измеряют углы -наклона гидростоек от сительно оси аппликат в плоскости профиля пласта и в плоскости прости рания пласта, измеряют величины выд вижки штоков гидростоек, измеряют углы наклона рештаков относительно оси аппликат в плоскости простирани пласта, используя измеренные значения для каждого рештака, определяют координаты завальной точки резания кровли исполнительньп-f органом комбай на и координаты точки, находящейся на забойной стороне верхняка крепи лежащей в плоскости, проходящей чере завальную точку резания и параллельной плоскости простирания пласта, при этом, если ордината точки верхня ка окажется больше, чем у точки реза ния, то сравйивают их аппликаты и, если аппликата точки верхняка окажет ся меньше, чем у точки резания, то идентифицируется столкновение, находят разность между ординатами точки забойной стороны верхняка и точкой резания кровли, затем отодвигают сек цию крепи в сторону завала на полученную величину и по прохождению ис- долп ;тельными органами комбайна се ции крепи ее выдвигают в первоначаль йое положение.
14
пройдеиного комбайном, задании положения исполнительных органов комбайна относительно его корпуса в неподг вижной прямоугольной системе координат, в которой ось абсцисс направлена по почве пласта по длине лавы и ось аппликат - по мощности пласта, измерении угла наклона рештаков конплоскости профиля пласта, отличающийся тем, что,с целью повышения надежности за счет прогнозирования и парирования столкновений исполнительных органов комбайна с
верхняками секций крепи, задают трехмерную систему координат, измеряют углы наклона гидродомкратов передвижки относительно оси аппликат в плос25
30
35
. п
45
0
5
простирания пласта, измеряют углы наклона оснований секций крепи относительно оси аппликат в плоскости профиля пласта и в плоскости простирания пласта, измеряют углы наклона верхняков секций крепи относительно оси аппликат в плоскости профиля пласта и в плоскости простирания пласта, измеряют углы -наклона гидростоек отно- сительно оси аппликат в плоскости профиля пласта и в плоскости простирания пласта, измеряют величины выд- вижки штоков гидростоек, измеряют углы наклона рештаков относительно оси аппликат в плоскости простирания пласта, используя измеренные значения для каждого рештака, определяют координаты завальной точки резания о кровли исполнительньп-f органом комбайна и координаты точки, находящейся на забойной стороне верхняка крепи и лежащей в плоскости, проходящей через завальную точку резания и параллельной плоскости простирания пласта, при этом, если ордината точки верхняка окажется больше, чем у точки резания, то сравйивают их аппликаты и, если аппликата точки верхняка окажется меньше, чем у точки резания, то идентифицируется столкновение, находят разность между ординатами точки забойной стороны верхняка и точкой резания кровли, затем отодвигают секцию крепи в сторону завала на полученную величину и по прохождению ис- долп ;тельными органами комбайна секции крепи ее выдвигают в первоначаль- йое положение.
,
О
г
fPue.f
ХУУ ХХ ХХХХХ.
ХуУхХУУ
--Ч--
laj
r;/)--JA- Т
y ,
f
j(K.j)
-
Фи.
Фиъ.5
Составитель Ю.Элькин Редактор О.Юрковецкая Техред Л.Сердюкова Корректор М.Самборская
Заказ 7015/31
Тираж 449
ВНИИПИ Государственного комитета по изобретениям и открытиям при ГКНТ СССР 113035, Москва, Ж-35, Раушская наб., д. 4/5
Производственно-издательский комбинат Патент, г.Ужгород, ул, Гагарина,101
Подписное
| Способ оценки эффективности лечения хронического катарального гингивита у детей | 2019 |
|
RU2714506C1 |
| Выбрасывающий ячеистый аппарат для рядовых сеялок | 1922 |
|
SU21A1 |
| Устройство для видения на расстоянии | 1915 |
|
SU1982A1 |
| Способ программного управления очистным комбайном,работающим со става конвейера,и система программного управления очистным комбайном | 1984 |
|
SU1236103A1 |
| Выбрасывающий ячеистый аппарат для рядовых сеялок | 1922 |
|
SU21A1 |
