W
ч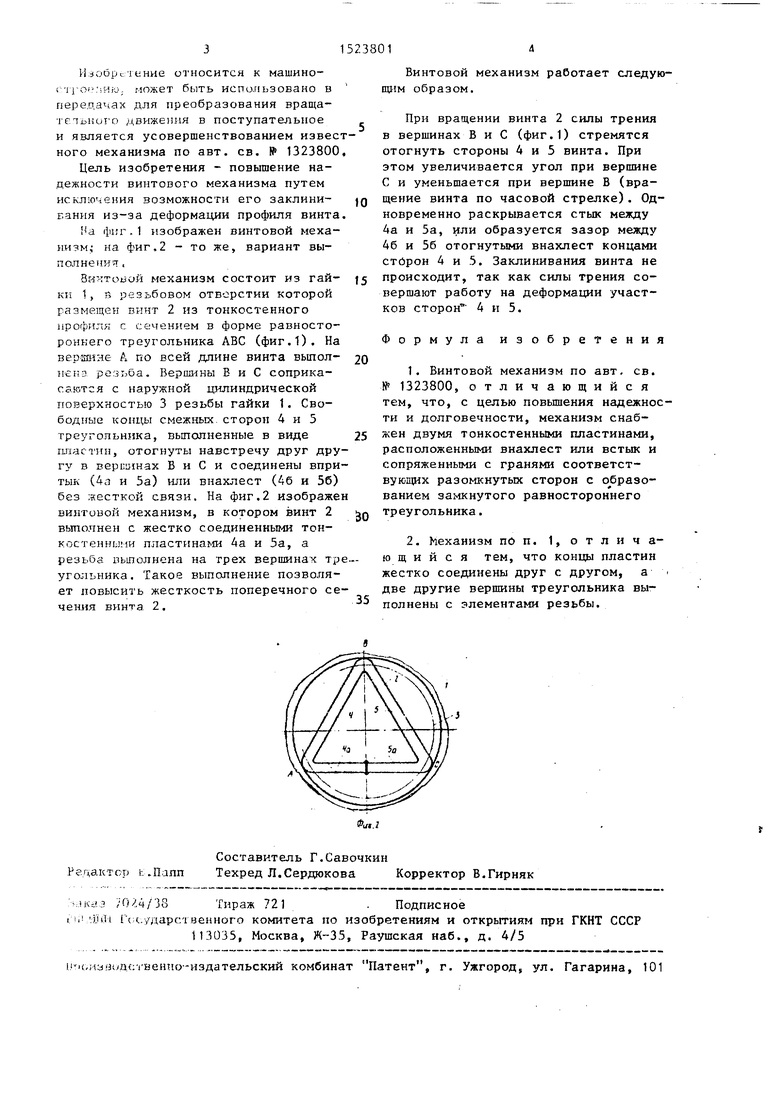
| название | год | авторы | номер документа |
|---|---|---|---|
| Винтовой механизм | 1986 |
|
SU1323800A1 |
| УСТРОЙСТВО ДЛЯ ПОЛУЧЕНИЯ ВРАЩАТЕЛЬНОГО ДВИЖЕНИЯ АБРАМОВА В. А. | 2016 |
|
RU2686648C9 |
| Устройство для получения вращательного движения Абрамова Валентина Алексеевича (Абрамова В.А.) | 2016 |
|
RU2654690C9 |
| Двигатель с внешним подводом теплоты | 1986 |
|
SU1366669A2 |
| УСТРОЙСТВО ДЛЯ ФОРМООБРАЗОВАНИЯ | 1994 |
|
RU2076010C1 |
| УСТАНОВКА ДЛЯ ИЗУЧЕНИЯ ТРЕНИЯ В РЕЗЬБЕ | 1993 |
|
RU2087038C1 |
| АППАРАТ ДЛЯ КОРРЕКЦИИ ОКОЛОСУСТАВНЫХ ДЕФОРМАЦИЙ КОСТЕЙ КОНЕЧНОСТЕЙ | 2007 |
|
RU2331380C1 |
| ВИНТОВАЯ СТЯЖКА-РАСПОРКА | 1990 |
|
RU2011633C1 |
| УСТРОЙСТВО ДЛЯ ТРЕНИРОВКИ МЫШЦ | 2003 |
|
RU2266768C2 |
| РАБОЧАЯ КЛЕТЬ СТАНА ПРОДОЛЬНОЙ ПРОКАТКИ | 2006 |
|
RU2345851C2 |
Изобретение относится к машиностроению и может быть использовано в передачах для преобразования вращательного движения в поступательное. Цель изобретения - повышение надежности винтового механизма путем исключения возможности его заклинивания из-за деформации профиля винта. Винт 2 выполнен в виде замкнутого равностороннего треугольника, сторона которого, лежащая против вершины с резьбой, выполнена в виде отогнутых и соединенных друг с другом впритык или внахлест концами двух тонкостенных пластин. При вращении винта 2 силы трения в вершинах В и С стремятся отогнуть стороны 4 и 5 винта 2. 1 з.п. ф-лы, 2 ил.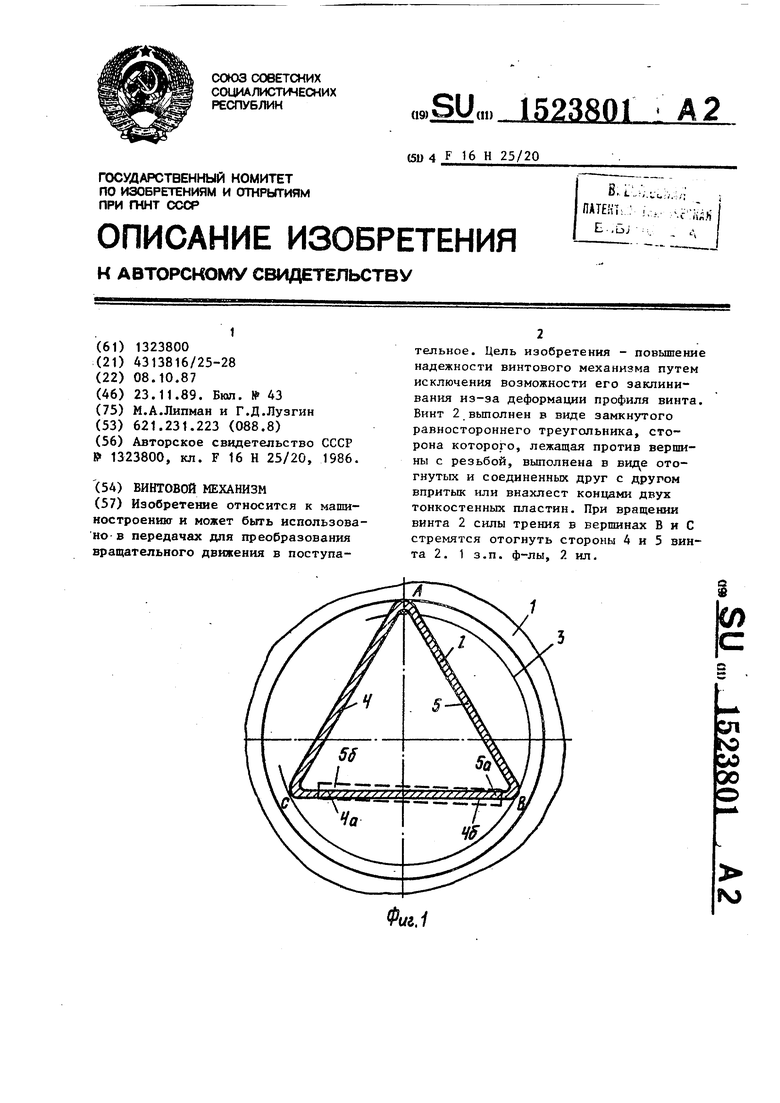
Р(/г.У
Изобретение относится к машино- t -1 l-of /iHf-j, может быть использовано в пере.пачах для преобразования враща- тетьнот о движения в поступательное и является усовершенствованием известного механизма по авт. св. № 1323800,
Цель изобретения - повьппение надежности винтового механизма путем исключения возможности его заклини- Бания из-за деформации профиля винта.
На . 1 изображен винтовой механизм,- на фиг.2 - то же, вариант выполнения ,
Ви :тох5ай механизм состоит из гайки 1, S резьбовом отверстии которой размещен винт 2 из тонкостенного 1 рофилк с сечением в форме равностороннего треугольника ABC (фиг.1). На вершнне А по всей длине винта выполнена резьба. Вершины В и С соприкасаются с наружной цилиндрической поверхностью 3 резьбы гайки 1. Свободные концы смежных, сторон 4 и 5 треугольника, вьтолненные в виде гшастип, отогнуты навстречу друг другу в Bepi;iiiHax В и С и соединены впритык (4а и 5а) или внахлест (4б и 56) без жесткой связи. На фиг.2 изображен винтовой механизм, в котором винт 2 вьтолнен с жестко соединенными тонкостенными плacтинa.o 4а и 5а, а резьба выполнена на трех вершинах треугольника. Такое выполнение позволяет повысить жесткость поперечного сечения винта 2.
o
5
0
5
0
5
Винтовой механизм работает следую- mjiM образом.
При вращении винта 2 силы трения в вершинах В и С (фиг.1) стремятся отогнуть стороны 4 и 5 винта. При этом увеличивается угол при вершине С и уменьшается при вершине В (вращение винта по часовой стрелке). Одновременно раскрьшается стык между 4а и 5а, или образуется зазор между 46 и 56 отогнутыми внахлест концами стйрон 4 и 5. Заклинивания винта не происходит, так как силы трения совершают работу на деформации участков сторон 4 и 5.
Формула изобретения
| Винтовой механизм | 1986 |
|
SU1323800A1 |
| Устройство для электрической сигнализации | 1918 |
|
SU16A1 |
