1
(21)4327673/24-24
(22)16.11.87
(46)23.11 .89. Бюл, № 43
(71)МВТУ им. К.Э.Баумана
(72)Ю.И.Рассадкин и И.Б.Лимонов
(53)681.327(088.8)
(56)Претт У. Цифровая обработка изображений. - М.: Мир, 1982.
Авторское свидетельство СССР № 1119042, кл. G 06 К 9/00, 1983.
(54)СПОСОБ ВЫДЕЛЕНИЯ КОНТУРОВ ИЗОБРАЖЕНИЯ ОБЪЕКТА
(57)Изобретение относится к автоматике и вьиислительной технике и предназначено для использования в промышленных роботах. Цель изобретения - повышение точности выделения контуров изображений. Для каждого направления сканирования изображения объек та формируют видеосигнал, генерируют последовательность опорных импульсов, сравнивают видеосигнал с опорными сигналами, регистрируют моменты их совнадения, формируют исходную последовательность импульсов, сравнивают ее с опорной последовательностью импульсов и регистрируют моменты их совпадения, измеряют интервалы времени между зарег;1стрированнь ми моментами совпадения импульсов и выделяют минимальные интервалы, на основе которых строят контур изображения объекта. Данная последовательность операции обс спечивает-высокое отношение сигнал/шум при выделении,, 7 ил.
«
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для ввода и вывода цветной графической информации | 1985 |
|
SU1315964A1 |
| Устройство подавления шума в канале воспроизведения видеомагнитофона | 1983 |
|
SU1124451A1 |
| СПОСОБ СЛЕЖЕНИЯ ЗА ОБЪЕКТОМ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1991 |
|
RU2153235C2 |
| СПОСОБ СЛЕЖЕНИЯ ЗА ОБЪЕКТОМ И ЦИФРОВАЯ ТЕЛЕВИЗИОННАЯ СЛЕДЯЩАЯ СИСТЕМА ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2010 |
|
RU2440691C1 |
| Устройство для отображения информации на телевизионном индикаторе | 1987 |
|
SU1495845A1 |
| Устройство для отображения информации на телевизионном индикаторе | 1984 |
|
SU1254537A1 |
| Электронный синтезатор светомузыкальных изображений на цветной электронно-лучевой трубке | 1987 |
|
SU1540844A1 |
| Устройство для отображения информации на телевизионном индикаторе | 1983 |
|
SU1091216A1 |
| Устройство динамической фокусировки кинескопа по яркости | 1986 |
|
SU1314480A1 |
| СПОСОБ ПОЛУЧЕНИЯ И ВОСПРОИЗВЕДЕНИЯ ОБЪЕМНОГО ИЗОБРАЖЕНИЯ И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 1995 |
|
RU2097940C1 |
Изобретение относится к автоматике и вычислительной технике и предназначено для использования в промышленных работах. Цель изобретения - повышение точности выделения контуров изображений. Для каждого направления сканирования изображения объекта формируют видеосигнал, генерируют последовательность опорных импульсов, сравнивают видеосигнал с опорными сигналами, регистрируют моменты их совпадения, формируют исходную последовательность импульсов, сравнивают ее с опорной последовательностью импульсов и регистрируют моменты их совпадения, измеряют интервалы времени между зарегистрированными моментами совпадения импульсов и выделяют минимальные интервалы, на основе которых строят контур изображения объекта. Данная последовательность операций обеспечивает высокое отношение сигнал/шум при выделении. 7 ил.
Изобретение относится к автоматике и вычислительной технике и предназначено для использования в промышленных роботахс
Целью изобретения является повышение точности выделения контуров изображения объектов.
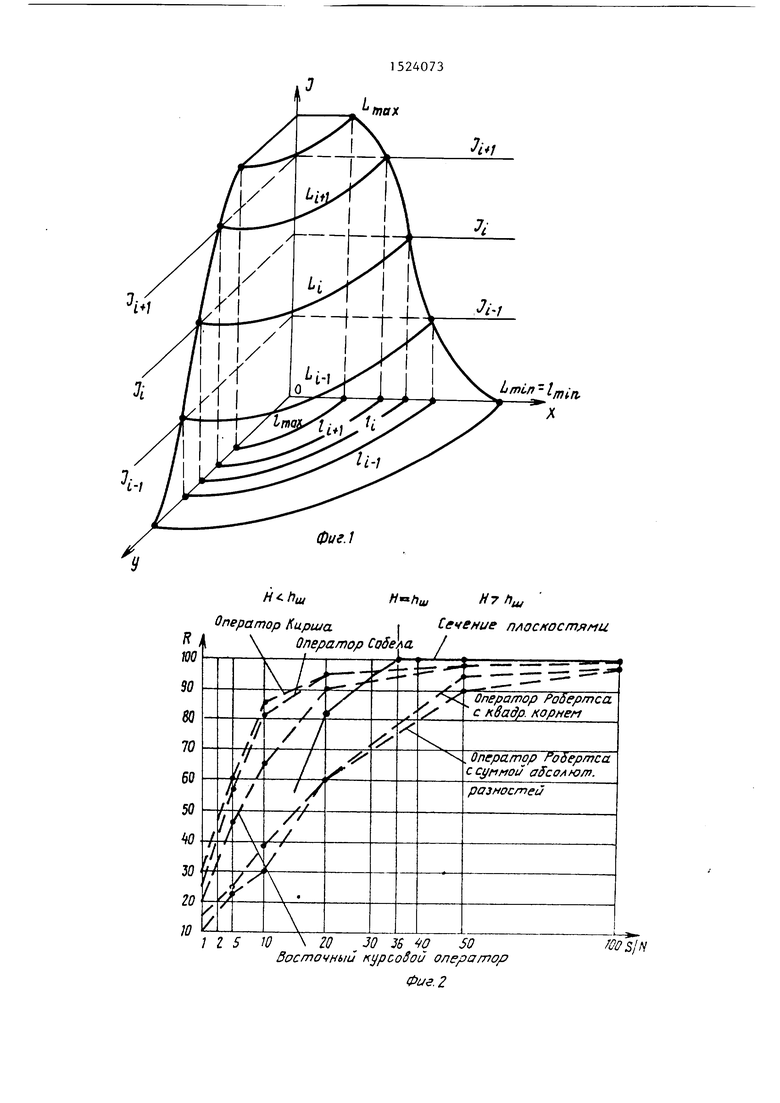
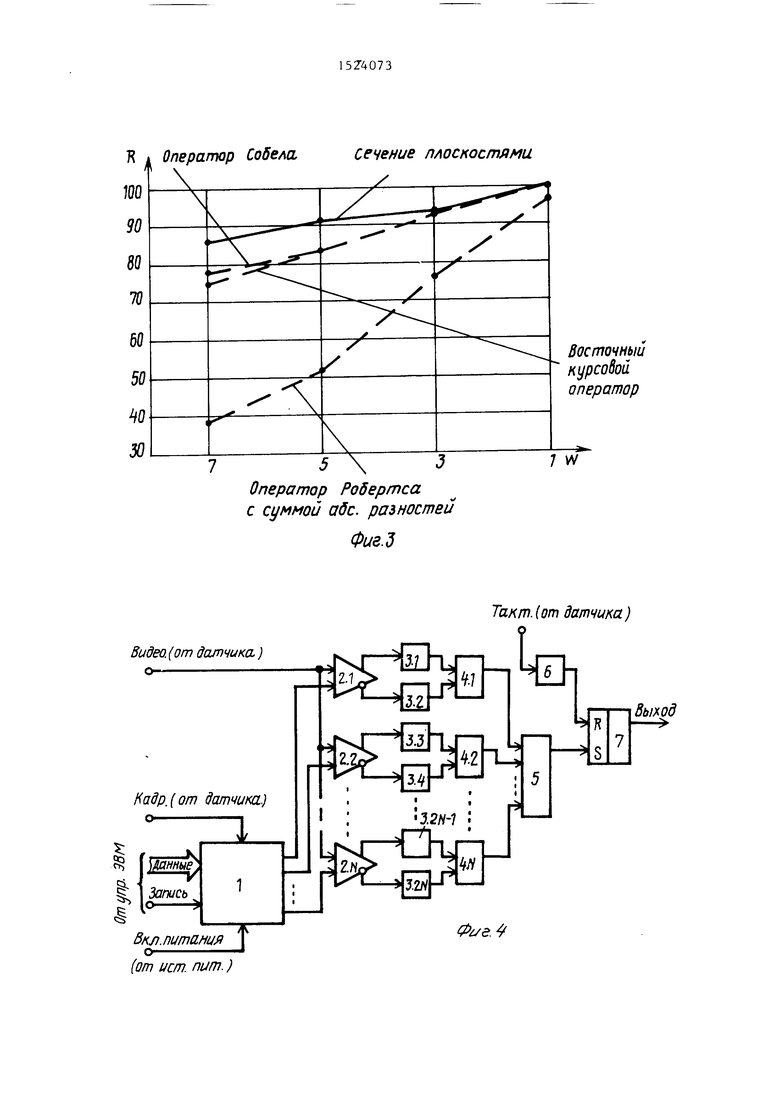
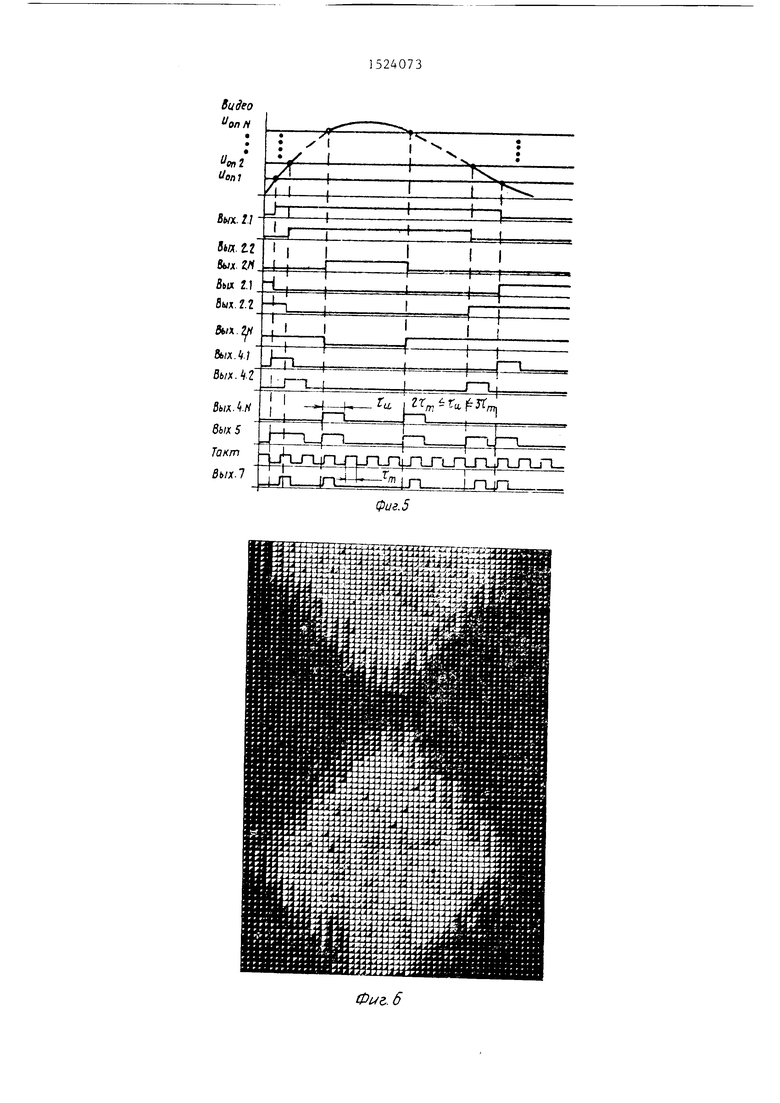
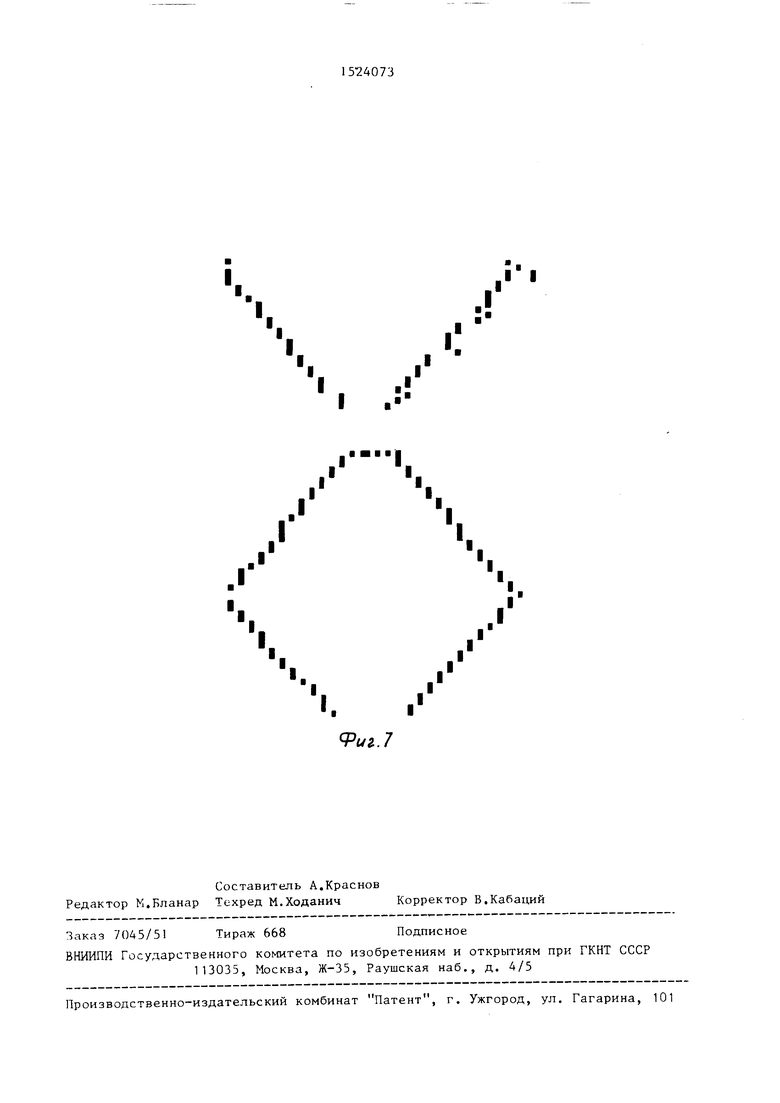
На фиг, 1 изображены кривые, поясняющие процесс получения линий уровня яркости изображения; на фиг.2 - графики значений критерия эффективной локализации перепадов от отношения сигнал/шум, полученных при реализации предлагаемого способа и известного с использованием различных операторов контрастирования; на фиг,3 - графики значений критерия эффективной локализации перепадов, полученных при реализации предлагаемого способа и известного с использованием различных операторов контрастирования; на фиг.4 - функциональная схема устройства, обрабатывающего по предлагаемому способу изображение, полученное с помощью телевизионного датчика, имеющего аналоговый выход ви - деосигнала; на фиг.5 - временные диаграммы, поясняющие работу устройства; на фиг.6 - изображение, вводимое с тел.евизионного датчика на вход устройства, обрабатывающего изображение по предлагаемому способу, и на вход ЭВМ, йечатаюией изображение; на фиг17 - изображение, вводимое в ЭВМ, печатающую изображение с выхода устройства, обрабатывающего изображение по предлагаемому способу.
3152
Устройство () для реализации предлагаемого способа содержит блок 1 фop 1иpoвaния опорных сигналов, группу 2 коммутаторов, группу формирователей 3 импульсов, группу элементов 2 1-ШИ 4, элемент N-ИЛИ 5, элемент НЕ 6, триггер 7 .
Все элементы функциональных схем выполнены в соответствии со стандартной схемотехникой.
Способ можно проиллюстрировать на примере сечения некоторой поверхности функции
I f(x, у)
(О
горизонтальными параллельными плоскостями
I; const.
(2)
установленными на равном расстоянии от друга, в диапазоне от минимального до максимального значений р.мссматриваемой поверхности функции (1) (фиг,1).
В точкахггересечения плоскостей (2) с поверхностью функтщи (1) получают некоторые кривые L, , для которых
- tni h
Т
AT; I, - I
1 -1
1
ma Сч
I, ii-,+M; ,„ +
fii;
I ;
(3) (A) (5)
где I
.ax и 1,.;,,,
соответственно максимальное и минимальное значения функции ();
- значение величины 1
1-й плоскости; Си - некоторое постоянное значение разноти между соседними плоскостями.
Тогда при проекции кривых на глоскость XOY получают линии уровня 1, поверхности функции (1) лежащие внутри члсти этой же плоскости, огра Ш1ченной линиями lug,, и l,;,,, полу ченньпчи также путем проекции линий границ областш максимальных и минимальных пичений поверхности Функции (I ) соотпетственно (фиг,1).
Линии уровня стягиваются друг к другу при возрастании скорости изменения функции поверхности, т.е расстояние между точками линий уровня, в которых скорость изменения функции новерхности достигает мак0
5
0
5
0
симальное значение, и ближайшими точками соседних линий уровня имеет наименьшее значение.
Вследствие изложенного признаком яркостного перепада является наличие множества линий уровня на некотором участке горизонтальной плоскости изображения, сливающихся в одну линию при резких изменениях яркости, а центр яркостного перепада при плавных изменениях яркости характеризуется минимальным расстоянием ду соседними линиями уровня,
С целью выявления эффективности локализации яркостных перепадов предлагаемым способом проводят эксперименты на тестовом изображении размерностью 64x64 элементов, яркость которых менялась в диапазоне 0-255. В центре тестового изображения находится вертикально ориентированный перепад яркости с переменным контрастом и крутизной наклона яркостного перепада. На изображение перепада наложен независимый гауссов шум со среднеквадратичным отклонением и . Результирующая картина ограничена по уровню в соответствии с диапазоном яркостей (0-255). Отношение сиг- }1ал/шум определяют как
S/N
(6)
5
0
5
0
5
где Н - высота перепада.
Качество локализации яркостного перепада оценивается величиной
R (I/IN) 21 l/(l + ), (7)
i
где (1,1д);
Ij- и Т. - число точек перепадов в идеальном и реальном контурных препаратах; (Xj - масштабный множитель; с расстояние между точкой действительного перепада и линией, состоящей из точек, идеального перепада, измеренное по нормали к этой линии. На фиг,2 приведены графики зависимости величины от отношения сигнал/шум для нескольких детекторов известного способа при следующих заданных параметрах:
Н 25; W 1,
где Н - высота перепада; W - ширина перепада.
Также приведен график зависимости величины R от отношения сигнал/шум для предлагаемого способа с пятью секущими плоскостями при тех же заданных параметрах. Значения уровней секущих плоскостей определяются как
I;
I + ((H-hJ/(n-l))i,
(8)
ш п т
1
где Н - высота яркостного перепада; h,,, - амплитуда шума;
максимальное число секущих плоскостей;
минимальное значение яркостного перепада; номер секущей плоскости. На фиг,3 приведены графики зависимости величины от ширины яркостного перепада цдя нескольких детекторов прототипа при следующих заданных параметрах:
c l/9; К 25; S/N 100.
Кроме того, .приведен график зависимости величины R от ширины яркостного перепада для предлагаемого способа с пятью секущими плоскостями.
Как видно из приведенных графиков (фиг.2 и 3), предлагаемый способ не уступает по качеству локализации яр- костного перепада в диапазоне
Уп
h,,H,
(9)
известному с наиболее удачными детекторами.
Устройство (фиг.4) содержит блок 1 формирования опорных сигналов, информационный вход которого соединен с соответствующим выходом управляющей ЭВМ и является вторым информационным входом устройства, первый управляющий вход блока 1 формирования опорных сигналов является входом кадрового сигнала устройства, второй равляющий вход блока 1 формирования опорных сигналов соединен с соответствующим выходом управляющей ЭВМ и является входом сигнала записи в устУп-
ройство, третий управляющий вход блока 1 формирования опорных сигналов является входом сигнала включения питания устройства, выходы блока 1 формирования опорных сигналов соединены с соответствующими входами группы компараторов 2, информационные входы которых соединены между собой и являются первым информационным входом устройства, а их прямые и инвертирующие
10
15
20
25
выходы соединены с входами устройств группы формирователей 3 импульсов, входы которых попарно соединены с входами группы элементов 2-ИПИ 4, а их выходы соединены с входами элемента N-HJIH 5, выход которого соединен с первым управляюш 1м входом триггера 7, второй управляющий вход которого является тактовым входом устройства .
Устройство работает следующим образом.
При включении питания устройства импульс сигнала включения питания через соответствующий вход устройства попадает на соответствующие управляющие входы блока 1 формирования опорных сигналов, в результате чего сбрасывается содержание его регистров . После этого управляющая ЭВМ устанавливает на втором информационном входе устройства величину сигнала в цифровой форме и подает сигнал Запись с соответствующего ее выхода на соответствующр й вход устройства .
Видеосигнал с телевизионного датчика, поступающий на первый информа- 30 ционный вход устройства, попадает на информационные группы Ko :iiapa- торов 2, а на их входь; опорного сигнала поступает сигнал блока 1 формирования опорных сигналов, в результате чего происходит сравнение сигнала с различными значениями опорного сигнала, В случае, если видео- CiirHiLi изменяет свое п(1ложение }) у или пнуто сторону по отношению к установленному на соответструтошем входе одного из компараторов груптты компараторов 2, то на выходе этого ком- пара, ора сигнал также изменяет свое значение на противоположное, и с выхо - д да соответствующего форми;ювателя пульсов группы формирователе 3 импульсов импульс через соответствующий элемент группы элементов 2-ИЛИ 4 поступает на вход элемента К-ИЛН 5-,
35
40
с выхода которого поступает
н,
i ВТО6, п в 6 ч:та
рои управляющий вход триггера результате на выходе триггера навливается единичный сигнал.
Тактовый сигнал телевизионного датчика, поступающий на соответствующий вход устройства, инвертируется элементом КЕ 6, не его выхода поступает на первый управляющий вход триггера 6, в результате чего выходной
сигнал триггера 7 все время сбрасывается в нулевое состояние инвертированным тактовым сигналом.
Управляющая ЭВМ в процессе работы устройства обсчитывает текущий кадр изображения с целью получения гисто- граммных характеристик изображения и по ним рассчитывает величины сигналов которые должны быть установлены на выходе блока 1 формирования опорных сигналов. По первому после записи кадровому импульсу на выходах блока I формирования опорных сигналов устанавливаются заданные сигналы. Таким образом, в процессе работы устройства значения сигналов на выходах блока 1 формирования опорных сигналов все время корректируются в соответствии с изменением изображения.
Устройство для реализации осуществляет фиксацию точек, в которых видеосигнал принимает значения, заданные управляющей ЭВМ, т.е. осуществляет сечение поверхности изображения горизонтальными параллельными плоскостями и фиксирует линии уровня яркости изображения.
Выход устройства соединяется с входом любой ЭВМ, имеющей память, объем которой позволяет записать в нее кадр бинарного изображения, полученного от данного телевизионного датчика, и способной построить контур изображения за некоторое допустимое время, удовлетворяющее техническим требованиям.
Проверку работоспособности устройства предводят следующим образом.
0
5
0
5
0
5
0
С выхода телевизионного датчика видеосигнал одновременно подается на вход устройства и вход ЭВМ, которая записьшает в свою память изображение. Одновременно с этим другая ЭВМ, вход которой соединен с выходом устройства, записывает в свою память результаты обработки изображения устройством по предлагаемому способу. После этого оба записанных изображения распечатаны на печатающих устройствах этих ЭВМ.
Формула изобретения
Способ выделения контуров изображения объекта, заключающийся в формировании видеосигнала для каждого направления сканирования изображения объекта, генерирации последовательности опорных импульсов, сравнении видеосигнала с опорными сигналами, регистрации момента совпадения значений амплитуд видеосигнала с опорными сигналами и формировании исходной последовательности импульсов, отличающийся тем, что, с целью повьшения точности, сравнивают исходную последовательность импульсов с опорной последовательностью импульсов и регистрируют моменты их совпадения, формируют интервалы времени, пропорциональные моментам совпадения импульсов, вьщеляют минимальные интервалы, регистрируют импульсы исходной последовательности, соответствующие минимальным интервалам времени, и по совокупности полученных сигналов для каждого направления сканирования судят о контуре изображения объекта.
7;
фиг.1
.
ш
ff Д WQ
Оператор Кирша
Оператор Сидела,
70 60 5Q ад 30 20
JO
/ г 5 W 20 JO J6 q 50
Восточный курсобой олераглор
Физ.2
max
H hujti7
CfffC ue п ос/ остями
юов
Оператор Собела
ГЛ
Оператор Робертса с суммой аде. разностей
Фиг.З
ffudeo. (от датчика)
вкл.питиния о
(от ист. пит.)
сечение плоскостями
Восточньш
курсоЗой
оператор
7 W
Так т. (от датчика)
k-,Lm
Вы)(од
Фиг.. 6
/
II
i
. l
.
V
Ii
..
I. /
Ф«/2.7
