Изобретение относится к области телевизионных измерительных систем, телевизионных систем слежения за подвижными объектами, в том числе с подвижного основания, и может быть использовано в комбинированных следящих системах промышленного назначения, навигационных системах, системах слежения за малоразмерными объектами, системах управления заходом на посадку и других системах аналогичного назначения, в которых необходима оценка координат движения объекта слежения в процессе его движения.
Известен способ автоматического управления в нелинейной системе и следящая система для его осуществления (Патент РФ №2149437, 07.04.1999, опубл. 20.05.2000). Известный способ заключается в суммировании сигнала, пропорционально первой координате, соответствующей ошибке, с линейной комбинацией двух сигналов обратных связей по второй координате, соответствующей скорости силового привода, один из которых имеет ограничение по амплитуде, и подаче суммарного сигнала на вход силового привода. При этом второй сигнал обратной связи по второй координате формируют пропорциональным этой координате, а на вход силового привода подают дополнительно сигнал, пропорциональный первой координате, имеющей ограничение по амплитуде.
Следящая система содержит последовательно соединенные измеритель рассогласования сигнала задания и сигнала единичной главной обратной связи, четыре усилителя, сумматор, силовой привод, тахогенератор, выход которого связан с входом двух параллельно соединенных ветвей, при этом вход второй параллельной ветви соединен с входом третьего усилителя, а выход измерителя рассогласования связан через последовательно соединенные нелинейное звено с зоной ограничения.
Известен также способ автоматического управления и следящая система для его осуществления (Патент РФ №2296355, 17.12.2004, опубл. 27.03.2007, бюл. №9). В способе автоматического управления задающий сигнал суммируют с сигналом коррекции, который формируют нечетким образом путем фаззификации задающего сигнала и полученной с запаздыванием суммы сигнала ошибки и сигнала коррекции с последующим нечетким логическим выводом с помощью продукционных правил и дефаззификацией.
Следящая система с люфтом содержит измеритель рассогласования задающего и выходного сигналов, суммирующий вход которого соединен с суммирующим входом первого сумматора, последовательно соединенного с нелинейным звеном типа «люфт» и объектом управления с датчиком выходного сигнала, выход которого соединен с вычитающим входом измерителя рассогласования, второй сумматор, блок запаздывания, вход которого соединен с выходом второго сумматора, компенсатор, выполняющий фаззификацию входных сигналов с последующим формированием компенсирующего сигнала на основе базы правил нечеткой логики и дефаззификацией, блок дифференцирования, вход которого соединен с суммирующим входом измерителя рассогласования, а выход - с вторым (характеристическим) входом компенсатора.
Недостатком вышеуказанных известных способов и реализующих их устройств является отсутствие учета размеров ограниченных участков дискриминаторных характеристик измерителей рассогласований между входными сигналами и сигналами обратной связи. В случае превышения ошибкой слежения размеров дискриминаторной характеристики происходит срыв слежения.
Наиболее близкими к предлагаемому решению по технической сущности и достигаемому эффекту являются способ управления стробом с запоминанием массива видеоданных и цифровая телевизионная следящая система (Коротаев В.В., Краснящих А.В. Телевизионные измерительные системы. - СПб, СПбГУ ИТМО, 2008, стр.90, рис.2.18. http://window. edu.ru/window_catalog/files/r54401/itmo212.pdf).
Известный способ слежения за объектом заключается в том, что аналоговый телевизионный видеосигнал подвергают согласованной фильтрации, преобразуют в цифровой телевизионный видеосигнал, записывают в оперативное запоминающее устройство (ОЗУ) массив видеоданных в пределах следящего строба, формируют измеренные координаты объекта слежения путем выделения яркостных аномалий в телевизионном кадре, по значениям оценок вектора состояния объекта по каждой из координат (n-1)-ого кадра рассчитывают координаты центра следящего строба n-ого кадра, ошибки слежения по каждой координате n-ого кадра рассчитывают как разность между измеренными координатами объекта и координатами центра следящего строба этого кадра, а оценки вектора состояния объекта по каждой координате n-ого кадра определяют как сумму взвешенных значений ошибок слежения и координат центра следящего строба n-ого кадра.
Цифровая телевизионная следящая система (ЦТСС) содержит последовательно соединенные телевизионный датчик, устройство предварительной обработки видеосигнала, АЦП, ОЗУ, фильтр видеосигнала и дискриминатор, генератор строба, подключенный через устройство управления ОЗУ к второму входу ОЗУ, траекторный фильтр, соединенный выходами с регистрами хранения кодов оценок координат, синхрогенератор, соединенный по входу с телевизионным датчиком, а выходами с синхровходами АЦП, устройства управления ОЗУ, дискриминатора и генератора строба.
Недостатком известного способа управления стробом ЦТСС и следящей системы является срыв слежения при превышении хотя бы одной из двух ошибок слежения (по соответствующим координатам в картинной плоскости) размеров строба по этой координате.
Техническим результатом заявляемого технического решения является повышение устойчивости следящих систем за счет динамической коррекции положения центра строба слежения без увеличения размеров строба.
Это достигается тем, что способ слежения за объектом, заключающийся в том, что аналоговый телевизионный видеосигнал подвергают согласованной фильтрации, преобразуют в цифровой телевизионный видеосигнал, записывают в ОЗУ массив видеоданных в пределах следящего строба, формируют измеренные координаты объекта слежения путем выделения яркостных аномалий в телевизионном кадре, по значениям оценок вектора состояния объекта по каждой из координат (n-1)-ого кадра рассчитывают координаты центра следящего строба n-ого кадра, ошибки слежения по каждой координате n-ого кадра рассчитывают как разность между измеренными координатами объекта и координатами центра следящего строба этого кадра, а оценки вектора состояния объекта по каждой координате n-ого кадра определяют как сумму взвешенных значений ошибок слежения и координат центра следящего строба n-ого кадра, отличается тем, что перед формированием координат центра следящего строба сравнивают усредненную ошибку слежения по каждой из координат с заданным порогом, при этом при превышении усредненной ошибкой слежения (n-1)-ого кадра по любой из координат заданного порога центр строба по этой координате в n-м кадре смещают на величину этого порога в сторону уменьшения непосредственно измеряемой ошибки слежения, а измеренную ошибку слежения по той же координате n-ого кадра увеличивают на величину того же порога для компенсации влияния смещения ошибки слежения на получаемые значения оценок вектора состояния объекта.
А также тем, что цифровая телевизионная следящая система, содержащая последовательно соединенные телевизионный датчик, устройство предварительной обработки видеосигнала, аналогово-цифровой преобразователь (АЦП), оперативное запоминающее устройство (ОЗУ), фильтр видеосигнала и дискриминатор, генератор строба, подключенный через устройство управления ОЗУ к второму входу ОЗУ, траекторный фильтр, соединенный выходами с двумя регистрами хранения кодов оценок координат, синхрогенератор, соединенный по входу с телевизионным датчиком, а выходами - с синхровходами АЦП, устройства управления ОЗУ, дискриминатора и генератора строба, отличается тем, что в нее дополнительно введены первый сумматор, устройство коррекции и второй сумматор, при этом вход первого сумматора соединен с выходом дискриминатора, а выход - с входами траекторного фильтра и устройства коррекции, выход которого соединен с вторым входом первого сумматора и с первым входом второго сумматора, второй вход которого подключен к третьему выходу траекторного фильтра, а выход - к информационному входу генератора строба.
Суть заявляемого способа и устройства поясняется чертежами.
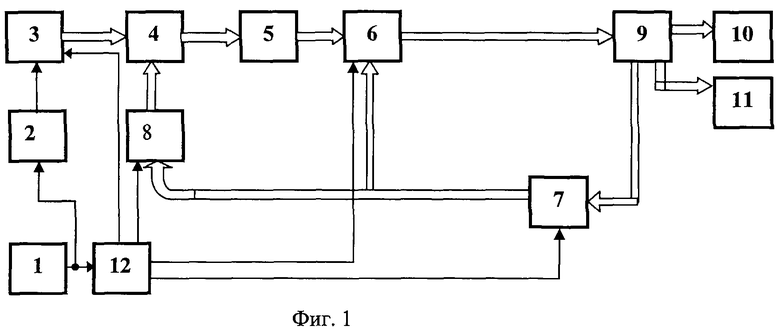
На фиг.1 представлена функциональная схема устройства, реализующая способ управления стробом цифровой телевизионной следящей системы (прототип);
на фиг.2 - функциональная схема цифровой телевизионной следящей системы, реализующей предлагаемый способ слежения за объектом;
на фиг.3 - функциональная схема устройства коррекции в составе предлагаемой следящей системы;
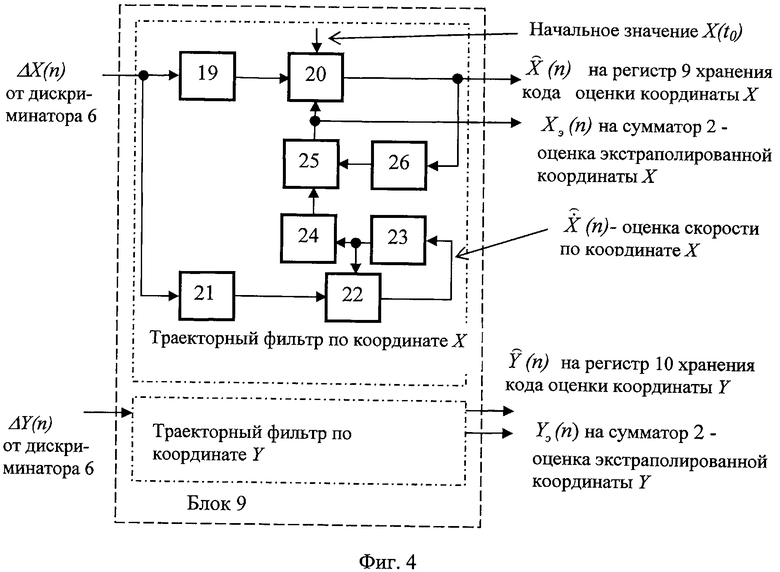
на фиг.4 - функциональная схема траекторного фильтра;
на фиг.5 - пространственное положение следящего строба в растре и объекта в стробе;
на фиг.6 - цифровое изображение объекта сопровождения;
на фиг.7 - статическая характеристика дискриминатора (расстояние от центра строба до его границы по осям Х и У обозначено как Qm);
на фиг.8 - статическая характеристика нелинейного блока в составе блока коррекции;
на фиг.9 - эквивалентное преобразование исходной структуры ЦТСС в структуру с единственной обратной связью;
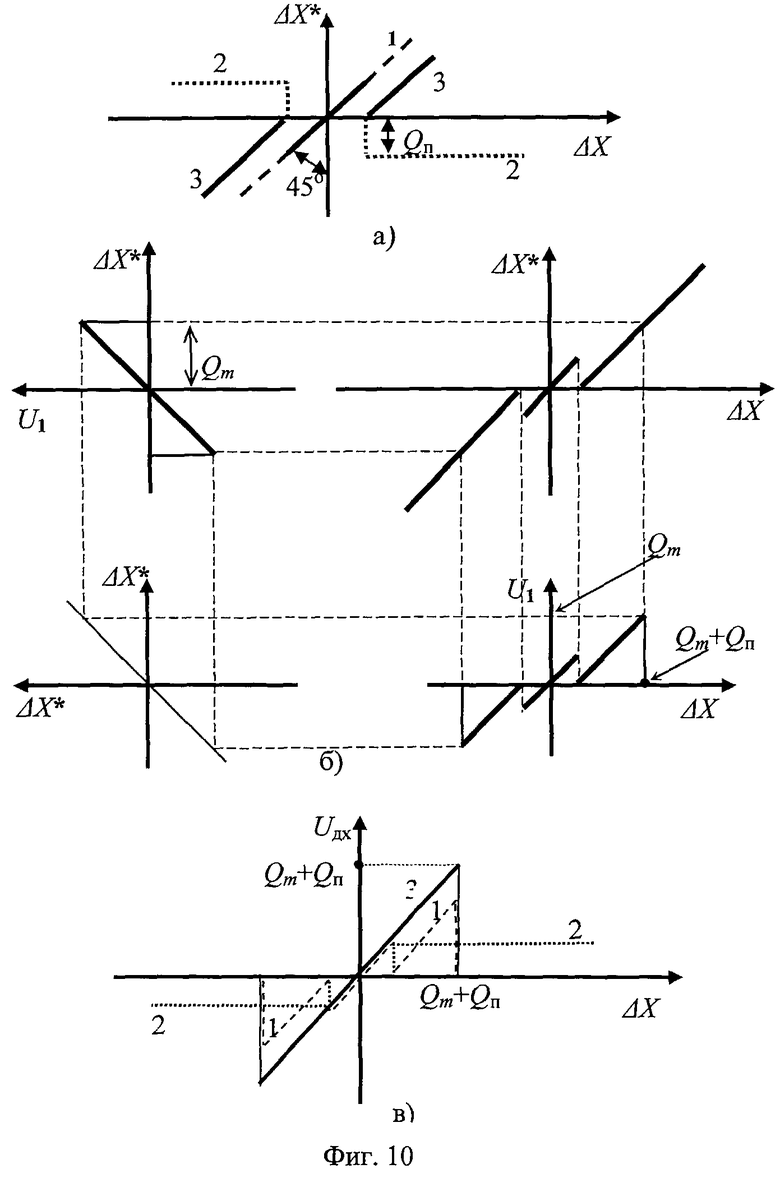
на фиг.10 - построение результирующей дискриминаторной характеристики ЦТСС;
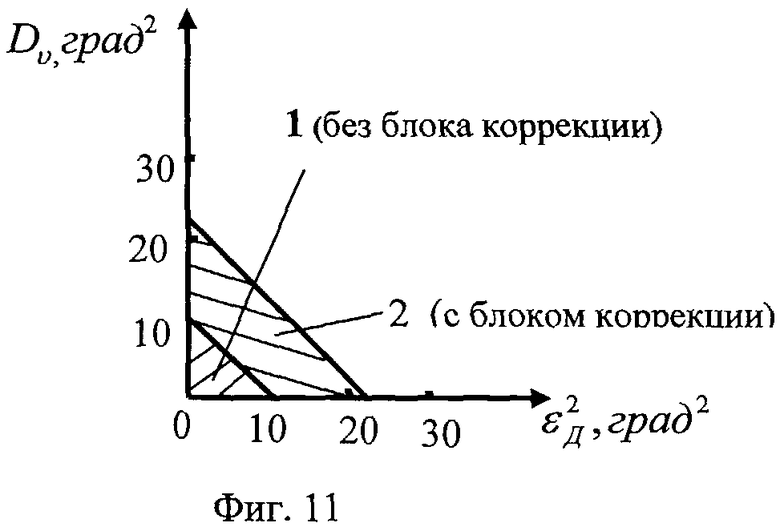
на фиг.11 - области устойчивой работы ЦТСС.
Отметим некоторые особенности предлагаемого способа.
Согласованная фильтрация аналогового телевизионного видеосигнала может производиться посредством прохождения ТВ сигнала через фильтр, амплитудно-частотная характеристика которого соответствует амплитудно-частотному спектру сигнала от объекта слежения с целью подавления флюктуационных и фоновых помех в видеосигнале, при необходимости линеаризуется тракт формирования, усиления и преобразования видеосигнала (например, с помощью так называемого γ-корректора), а также при необходимости может производиться преобразование стандарта ТВ сигнала для согласования скорости поступления информации от телевизионного датчика с быстродействием следящей системы.
Формирование измеренных координат объекта слежения путем выделения яркостных аномалий в телевизионном кадре может производиться посредством суммирования взвешенных нормированных значений яркости элементов разрешения, отнесенных к объекту слежения.
Определение усредненных ошибок слежения по каждой из сопровождаемых координат рассчитывается как среднее арифметическое по нескольким смежным кадрам, количество которых выбирается равным нескольким единицам, например, пяти.
Цифровая телевизионная следящая система (фиг.2) содержит последовательно соединенные телевизионный датчик 1, устройство 2 предварительной обработки сигнала, АЦП 3, ОЗУ 4, фильтр 5 видеосигнала и дискриминатор 6, генератор 7 строба, подключенный через устройство 8 управления ОЗУ к второму входу ОЗУ 4, траекторный фильтр 9, соединенный выходами с регистрами 10 и 11 хранения кодов оценок координат, синхрогенератор 12, соединенный по входу с телевизионным датчиком 1, а выходами с синхровходами АЦП, устройства 8 управления ОЗУ, дискриминатора 6 и генератора 7 строба. В систему дополнительно введены первый сумматор 13, устройство 14 коррекции и второй сумматор 15. Вход первого сумматора 13 соединен с выходом дискриминатора 6, а выход - с входами траекторного фильтра 9 и устройства 14 коррекции, выход которого соединен с вторым входом первого сумматора 13 и с первым входом второго сумматора 15, второй вход которого подключен к третьему выходу траекторного фильтра 9, а выход - к информационному входу генератора 7 строба.
Устройство 14 коррекции состоит из последовательно соединенных блока 16 усреднения, первого блока 17 задержки и нелинейного блока 18 (фиг.3).
Траекторный фильтр 9 (блоки оценивания и экстраполяции координат объекта слежения) состоит из двух схематически одинаковых траекторных фильтров по координате Х и координате Y (фиг.4). Для определенности раскроем структуру траекторного фильтра по координате X. Он состоит из соединенных последовательно первого масштабирующего блока 19 с коэффициентом передачи α и третьего сумматора 20, из соединенных последовательно второго масштабирующего блока 21 с коэффициентом передачи β/ΔТ, четвертого сумматора 22, второго блока 23 задержки, третьего масштабирующего блока 24 с коэффициентом передачи ΔT и пятого сумматора 25, выход которого подключен к второму входу третьего сумматора 20, на третий вход которого подается начальный код оценки координаты, а выход, подключенный через третий блок задержки 26 к второму входу пятого сумматора 25, является выходом траекторного фильтра по одной из координат, входы первого 19 и второго 21 масштабирующих блоков соединены и являются входом траекторного фильтра, а выход второго блока задержки 23 подключен также к второму входу четвертого сумматора 22.
Цифровая телевизионная следящая система работает следующим образом.
Видеосигнал с выхода телевизионного датчика 1 подается на вход устройства 2 предварительной обработки видеосигнала, в котором телевизионный видеосигнал подвергается согласованной фильтрации с целью подавления флюктуационных и фоновых помех в видеосигнале. При необходимости в устройстве 2 предварительной обработки линеаризуется тракт формирования, усиления и преобразования видеосигнала (например, с помощью так называемого γ-корректора), а также при необходимости может производиться преобразование стандарта ТВ сигнала для согласования скорости поступления информации от телевизионного датчика с быстродействием следящей системы. В АЦП 3 производится дискретизация видеосигнала по времени и квантование по уровню. Частота дискретизации в АЦП 3 выбирается с учетом ширины полосы частот сигнала с выхода устройства 2 предварительной обработки, а необходимое число уровней квантования по амплитуде - с учетом заданной точности измерения координат объекта. В ОЗУ 4 запоминается цифровой массив видеоданных в стробе сопровождения для последующей обработки и оценки сигнала ошибки слежения по координатам Х и Y кадра (в картинной плоскости, фиг.5). После окончания записи информации по каждому элементу разрешения в пределах строба буферизированный цифровой видеосигнал считывается из ОЗУ 4 и обрабатывается фильтром 5 видеосигнала. В фильтре 5 на основе выявления перепадов яркости реализуется метод выделения границ (выделение контуров), определяющий границы объекта слежения. В результате образуется массив чисел G(j, k), описывающий изображение объекта с подчеркнутыми изменениями яркостей (фиг.6). После выполнения операции сравнения с порогом обнаружения определяются положения элементов с ярко выраженными перепадами A(i, j). Измеренные координаты объекта определяются по выражениям:

где i, j - координаты элементов разрешения, iнач; jнач (iкон jкон) координаты границ объекта, A(i, j) - коды яркости элементов разрешения в составе объекта.
Измеренные координаты объекта Х и Y поступают на вход дискриминатора 6, статическая характеристика которого Uдх=Uдх(X-Хэ), Uду=Uду(Y-Yэ) для каждой из координат Х и Y приведена на фиг.7. Ограничение характеристики обусловлено ограниченными размерами следящего строба (на фиг.7 величиной Qm обозначено расстояние от центра до границ строба - полуширина дискриминаторной характеристики или апертура).
Для формирования сигналов ошибок ΔХ и ΔY по координатам Х и Y в соответствии с выражениями

на второй вход дискриминатора 6 подаются координаты центра строба Хэ(n), Yэ(n) с выхода генератора 7 строба.
Сигналы ошибки ΔХ и ΔY с выхода дискриминатора 6 через первый сумматор 13 поступают на устройство 14 коррекции и на траекторный фильтр 9 (фиг.4), в котором производится сглаживание (фильтрация, оценивание) координат X, Y и определяются экстраполированные координаты  объекта, определяющие центр строба сопровождения на следующий такт работы следящей системы. С выхода траекторного фильтра 9 оцененные координаты объекта
объекта, определяющие центр строба сопровождения на следующий такт работы следящей системы. С выхода траекторного фильтра 9 оцененные координаты объекта  подаются в соответствующие регистры 10 и 11 и запоминаются в них, а коды экстраполированных координат Хэ(n), Yэ(n) через второй сумматор 15 подаются на генератор 7 строба, который перемещается по кадрам в соответствии со значениями экстраполированных координат.
подаются в соответствующие регистры 10 и 11 и запоминаются в них, а коды экстраполированных координат Хэ(n), Yэ(n) через второй сумматор 15 подаются на генератор 7 строба, который перемещается по кадрам в соответствии со значениями экстраполированных координат.
Синхрогенератор 12 устройства по сигналам строчных и кадровых импульсов телевизионного датчика 1 вырабатывает последовательности тактовых импульсов для обеспечения согласованной работы всех узлов ЦТСС.
Устройство 8 управления ОЗУ по сигналам с генератора 7 строба и синхрогенератора 12 обеспечивает согласованную с разверткой телевизионного датчика 1 запись и считывание информации.
Вторые входы первого 13 и второго 15 сумматоров соединены с выходом устройства 14 коррекции, в состав которого (фиг.3) входят последовательно соединенные блок 16 усреднения, первый блок 17 задержки и нелинейный блок 18, статическая характеристика которого (реле с зоной нечувствительности) для каждой из координат приведена на фиг.8. Обработка информации реализована таким образом, что в дискриминаторе, всех сумматорах, траекторном фильтре и нелинейном устройстве она ведется одинаково, но независимо по каждой координате X, Y.
В блоке 16 с целью компенсации флюктуации усредняются ошибки слежения по каждой координате по ряду соседних тактов работы ЦТСС. Блок 17 задержки введен из условия физической реализуемости устройства. Работу устройства коррекции 14 рассмотрим на примере координаты X. Если усредненная ошибка слежения mΔx не превышает величины заданного порога сравнения Qп (см. фиг.8), то на вторые входы первого 13 и второго 15 сумматоров подаются коды нулей и ЦТСС функционирует как прототип. В противном случае в следующем такте работы ЦТСС (за счет первого блока 17 задержки) на второй вход второго сумматора 15 подается код порога Qп, следовательно, экстраполированная координата Хэ сместится к центру объекта слежения, тем самым повысив устойчивость слежения. Измеренная ошибка слежения ΔХ на выходе дискриминатора 7 также уменьшится на величину Qп. Чтобы получить значение истинной ошибки слежения для формирования оценок координат в траекторном фильтре 9, на второй вход сумматора 13 подается также величина Qп (учитывается отрицательная обратная связь ЦТСС, реализованная с помощью дискриминатора).
Траекторный фильтр 9 (фиг.4) реализует для каждой из координат независимо алгоритм оценивания параметров линейной траектории (α-β-фильтр) в соответствии с выражениями:

Здесь ΔT - интервал дискретизации по времени,  и
и  - оценки скорости объекта по соответствующим координатам, X(t0), Y(t0) - начальные значения координат объекта слежения; α и β - соответствующие коэффициенты α-β-фильтра.
- оценки скорости объекта по соответствующим координатам, X(t0), Y(t0) - начальные значения координат объекта слежения; α и β - соответствующие коэффициенты α-β-фильтра.
В начальный момент времени t0 при переходе ЦТСС в режим слежения в траекторный фильтр 9 подаются значения координат объекта X(t0) и Y(t0), полученные от системы высшего порядка (системой поиска объекта или оператором). Для реализации траекторного фильтра для каждой координаты в его функциональную схему (фиг.4) включены: первый масштабирующий блок 19 с коэффициентом передачи α; второй масштабирующий блок 21 с коэффициентом передачи β/ΔТ; третий масштабирующий блок 24 с коэффициентом передачи ΔT; третий сумматор 20; четвертый сумматор 22; пятый сумматор 25; второй 23 и третий 26 блоки задержки на один такт.
Введение дополнительных элементов позволяет расширить эквивалентный линейный участок характеристики дискриминатора. Изменение характеристики дискриминатора можно показать графически. Предварительно следует произвести необходимые эквивалентные преобразования структуры ЦТСС.
Обобщенная алгоритмическая схема предлагаемой ЦТСС представлена на фиг.9а. Уравнения нелинейных элементов, входящих в состав данной схемы, имеют следующий вид:


где Qm - апертура дискриминаторной характеристики; Qп - заданный порог.
При работе следящей системы на линейном участке дискриминаторной характеристики с точностью до ошибок измерения существует зависимость ΔХ≈mΔX. Следовательно, алгоритмическую схему ЦТСС можно преобразовать к виду, изображенному на фиг.9б.
Уравнения нелинейных элементов схемы имеют вид:


где ΔX*=ΔX+F4(ΔX).
Для подтверждения возможности расширения линейного участка дискриминаторной характеристики графически построим результирующую характеристику соединения нелинейных элементов. Для определенности примем Qп=Qm/2.
Суммарная характеристика параллельного соединения пропорционального звена и нелинейности F4(ΔX), характеристики которых на фиг.10а изображены штриховыми линией 1 и кривой 2 соответственно, получается суммированием ординат этих характеристик. Суммарная характеристика 3 (сплошные линии) имеет вид параллельных между собой двух полупрямых и отрезка, пересекающего ось абсцисс под углом 45°. Эквивалентное нелинейное звено с характеристикой 3 последовательно соединено с нелинейностью типа «дискриминаторная характеристика» F3(ΔX*). На фиг.10б выполнено построение характеристики U1=f(ΔX) такого последовательного соединения. Параллельно нелинейному звену с характеристикой U1=f(ΔX) (кривая 1 на фиг.10в) подключена нелинейность F5(ΔX) (кривая 2). Суммарная характеристика параллельного соединения этих нелинейностей, а следовательно, и результирующая характеристика всего соединения элементов, полученная сложением ординат характеристик 1 и 2, изображена сплошной кривой 3 (фиг.10в). По виду результирующей характеристики видно, что полуширина линейного участка характеристики в полтора раза больше по сравнению с исходной.
Одной из важных характеристик следящей системы по каждой из координат X, Y является область устойчивой работы в плоскости параметров: квадрат динамической ошибки  - флюктуационная ошибка Dυ. Данная область рассчитывается как площадь под графиком
- флюктуационная ошибка Dυ. Данная область рассчитывается как площадь под графиком  и характеризует граничные значения величин динамических и флюктуационных ошибок, при которых система работает устойчиво (не происходит срыва слежения).
и характеризует граничные значения величин динамических и флюктуационных ошибок, при которых система работает устойчиво (не происходит срыва слежения).
Покажем, что в системе, построенной по предлагаемому способу, происходит расширение области устойчивой работы ЦТСС. Для этого воспользуемся неравенством Чебышева [Ширяев А.Н. Вероятность. - М.: Наука. Гл. ред физ. - мат. лит. 1989. - 640 с.]. Учитывая, что измеряемая ошибка слежения ΔХ=Х-Хэ является случайной величиной, применительно к дискриминаторной характеристике можно записать:

где P{ΔX≥S} - вероятность того, что ошибка ΔХ превысит величину S, М - символ математического ожидания. В прототипе и рассматриваемом примере для предлагаемого способа и реализующего его устройства величина S равна соответственно Qm и 1,5 Qm.
Измеренная координата Х=Хи+υ представляется аддитивной смесью истинной координаты Хи и флюктуационных шумов измерения υ.
Учитывая выражения (4), по определению имеем

где М[Хи-Хэ]=εД - динамическая ошибка слежения; M[υ]=0, так как υ - центрированная случайная величина.
Учитывая (5), представим неравенство (4) в следующем виде:
 .
.
Откуда следует, что эквивалентное увеличение линейного участка характеристики дискриминатора приводит к уменьшению вероятности срыва слежения, или же система сможет обеспечивать заданную вероятность срыва слежения при более значительных динамических ошибках εд.
Произведем оценку областей устойчивой работы следящего измерителя на конкретном примере. Согласно следствиям, вытекающим из неравенства Чебышева, применительно к рассматриваемому случаю можно записать

Так как  Отсюда имеем
Отсюда имеем
Здесь Р1 - вероятность того, что модуль ошибки слежения |ΔX| выйдет за пределы строба слежения (превысит размер линейного участка характеристики дискриминатора S), что приведет к срыву слежения.
Задавая, например, требуемую величину P1=0,1 и считая ширину линейного участка характеристики дискриминатора прототипа S=Qm=10 ед. (например, градусов для ЦТСС), можно построить графики зависимости допустимой дисперсии  для прототипа и предлагаемого устройства, для которого в соответствии с фиг.10 S=1,5Qm=15 ед. На фиг.11 представлены графики данной зависимости.
для прототипа и предлагаемого устройства, для которого в соответствии с фиг.10 S=1,5Qm=15 ед. На фиг.11 представлены графики данной зависимости.
Анализ графиков показывает, что при увеличении эквивалентного линейного участка характеристики дискриминатора в полтора раза область устойчивости (площадь под графиком  ЦТСС расширяется в пять раз.
ЦТСС расширяется в пять раз.
Таким образом, при реализации предлагаемого способа слежения за объектом цифровая телевизионная следящая система сможет функционировать устойчиво (при том же заданном значении P1) при большем уровне помех или больших величинах динамических ошибок.
| название | год | авторы | номер документа |
|---|---|---|---|
| ЦИФРОВАЯ СЛЕДЯЩАЯ СИСТЕМА | 2010 |
|
RU2444038C1 |
| АДАПТИВНЫЙ СЛЕДЯЩИЙ ИЗМЕРИТЕЛЬ | 2012 |
|
RU2492506C1 |
| СЛЕДЯЩИЙ ИЗМЕРИТЕЛЬ | 2010 |
|
RU2435172C1 |
| Цифровое телевизионное следящее устройство | 1990 |
|
SU1748285A1 |
| ТЕЛЕВИЗИОННЫЙ КООРДИНАТНЫЙ ДИСКРИМИНАТОР | 1996 |
|
RU2143182C1 |
| Телевизионное следящее устройство | 1989 |
|
SU1699013A1 |
| ТЕЛЕВИЗИОННОЕ СЛЕДЯЩЕЕ УСТРОЙСТВО | 1988 |
|
SU1574152A1 |
| ТЕЛЕВИЗИОННЫЙ КООРДИНАТНЫЙ ДИСКРИМИНАТОР | 1996 |
|
RU2139640C1 |
| Координатный телевизионный измеритель | 1981 |
|
SU1040624A1 |
| СИСТЕМА СОПРОВОЖДЕНИЯ ПОДВИЖНЫХ ОБЪЕКТОВ | 2008 |
|
RU2388010C1 |

Изобретение относится к области телевизионных измерительных систем. Техническим результатом является повышение устойчивости следящих систем за счет динамической коррекции положения центра строба слежения без увеличения размеров строба. Результат достигается тем, что перед формированием координат центра следящего строба сравнивают усредненную ошибку слежения по каждой из координат с заданным порогом, при этом при превышении усредненной ошибкой слежения (n-1)-ого кадра по любой из координат заданного порога центр строба по этой координате в n-ом кадре смещают на величину этого порога в сторону уменьшения непосредственно измеряемой ошибки слежения, а измеренную ошибку слежения по той же координате n-ого кадра увеличивают на величину того же порога для компенсации влияния смещения ошибки слежения на получаемые значения оценок вектора состояния объекта. В цифровую телевизионную следящую систему дополнительно введены первый сумматор 13, устройство коррекции 14 и второй сумматор 15, при этом вход первого сумматора 13 соединен с выходом дискриминатора 6, а выход - с входами траекторного фильтра 9 и устройства коррекции 14, выход которого соединен с вторым входом первого сумматора 13 и с первым входом второго сумматора 15, второй вход которого подключен к третьему выходу траекторного фильтра 9, а выход - к информационному входу генератора 7 строба. 2 н. и 2 з.п. ф-лы, 11 ил.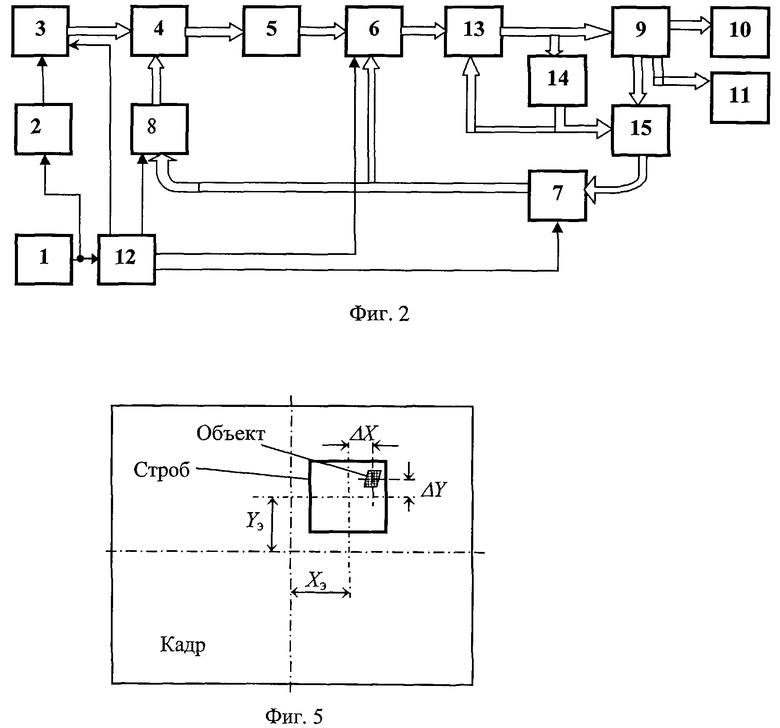
1. Способ слежения за объектом, заключающийся в том, что аналоговый телевизионный видеосигнал подвергают согласованной фильтрации, преобразуют в цифровой телевизионный видеосигнал, записывают в ОЗУ массив видеоданных в пределах следящего строба, формируют измеренные координаты объекта слежения путем выделения яркостных аномалий в телевизионном кадре, по значениям оценок вектора состояния объекта по каждой из координат (n-1)-го кадра рассчитывают координаты центра следящего строба n-го кадра, ошибки слежения по каждой координате n-го кадра рассчитывают как разность между измеренными координатами объекта и координатами центра следящего строба этого кадра, а оценки вектора состояния объекта по каждой координате n-го кадра определяют как сумму взвешенных значений ошибок слежения и координат центра следящего строба n-го кадра, отличающийся тем, что перед формированием координат центра следящего строба сравнивают усредненную ошибку слежения по каждой из координат с заданным порогом, при этом при превышении усредненной ошибкой слежения (n-1)-го кадра по любой из координат заданного порога центр строба по этой координате в n-м кадре смещают на величину этого порога в сторону уменьшения непосредственно измеряемой ошибки слежения, а измеренную ошибку слежения по той же координате n-го кадра увеличивают на величину того же порога для компенсации влияния смещения ошибки слежения на получаемые значения оценок вектора состояния объекта.
2. Цифровая телевизионная следящая система, содержащая последовательно соединенные телевизионный датчик, устройство предварительной обработки видеосигнала, аналого-цифровой преобразователь, оперативное запоминающее устройство (ОЗУ), фильтр видеосигнала и дискриминатор, генератор строба, подключенный через устройство управления ОЗУ к второму входу ОЗУ, траекторный фильтр, соединенный выходами с двумя регистрами хранения кодов оценок координат, синхрогенератор, соединенный по входу с телевизионным датчиком, а выходами с синхровходами АЦП, устройства управления ОЗУ, дискриминатора и генератора строба, отличающаяся тем, что в нее дополнительно введены первый сумматор, устройство коррекции и второй сумматор, при этом вход первого сумматора соединен с выходом дискриминатора, а выход - с входами траекторного фильтра и устройства коррекции, выход которого соединен с вторым входом первого сумматора и с первым входом второго сумматора, второй вход которого подключен к третьему выходу траекторного фильтра, а выход - к информационному входу генератора строба.
3. Цифровая телевизионная следящая система по п.2, отличающаяся тем, что устройство коррекции состоит из последовательно соединенных блока усреднения, первого блока задержки и нелинейного блока.
4. Цифровая телевизионная следящая система по п.2, отличающаяся тем, что траекторный фильтр состоит из соединенных последовательно первого масштабирующего блока и третьего сумматора, из соединенных последовательно второго масштабирующего блока, четвертого сумматора, второго блока задержки, третьего масштабирующего блока и пятого сумматора, выход которого, являющийся третьим выходом траекторного фильтра, подключен к второму входу третьего сумматора, на третий вход которого подается начальный код оценки координаты, а выход, подключенный через второй блок задержки к второму входу пятого сумматора, является выходом траекторного фильтра по одной из координат, входы первого и второго масштабирующих блоков соединены и являются входом траекторного фильтра, выход третьего блока задержки подключен также к второму входу четвертого сумматора.
| Коротаев В.В., Краснящих А.В | |||
| ТЕЛЕВИЗИОННЫЕ ИЗМЕРИТЕЛЬНЫЕ СИСТЕМЫ, Учебное пособие [он-лайн], 2008 [найдено 2011-03-03] | |||
| Станок для изготовления драночных щитов | 1936 |
|
SU54401A1 |
| GB 1349279 A, 1974.04.03 | |||
| KR 20030013092 A, 2003.02.14 | |||
| СИСТЕМА СОПРОВОЖДЕНИЯ ПОДВИЖНЫХ ОБЪЕКТОВ | 2008 |
|
RU2388010C1 |
| СИСТЕМА ВИЗИРОВАНИЯ ОБЪЕКТА | 2006 |
|
RU2315255C1 |
| Телевизионное устройство со следящим стробированием изображения объекта | 1976 |
|
SU640453A1 |

