ции, буферный блок 31, ключ 30. Результат измерения фиксируется счетчиком АО импульсов и отображается на отсчетном блоке 41. Блок 42 коррекции введен для исключения влияния собственной массы чувствительного элемента 1 на результат измерений. 3 з,п.ф-лы, 5 ил.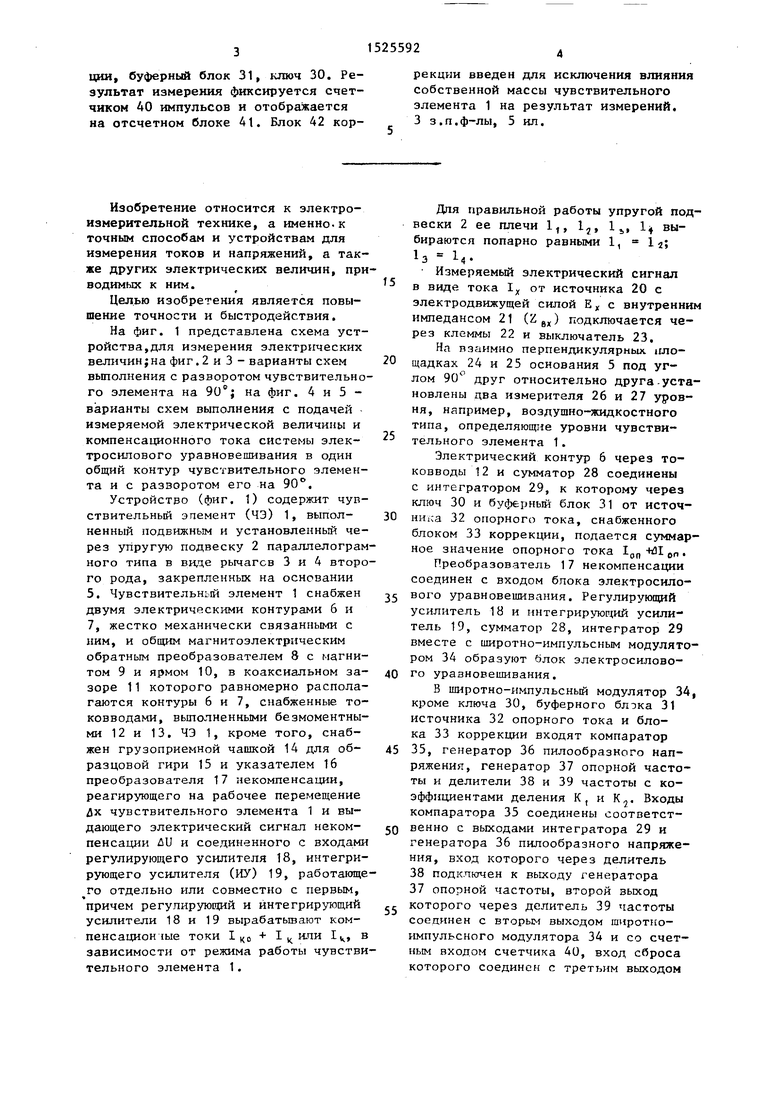
| название | год | авторы | номер документа |
|---|---|---|---|
| Цифровое весоизмерительное устройство | 1985 |
|
SU1276914A1 |
| Электропривод | 1988 |
|
SU1656652A1 |
| ИНТЕГРИРУЮЩЕЕ УСТРОЙСТВО СИНХРОНИЗАЦИИ | 2009 |
|
RU2422974C1 |
| КЛЮЧЕВОЙ СТАБИЛИЗАТОР | 1991 |
|
RU2011275C1 |
| Способ стабилизации выходного напряжения импульсного стабилизатора | 1985 |
|
SU1376069A1 |
| Компенсационно-параметрический импульсный стабилизатор постоянного напряжения | 1987 |
|
SU1437845A1 |
| ФАЗОСДВИГАЮЩЕЕ УСТРОЙСТВО | 2005 |
|
RU2288532C1 |
| Цифровые электромагнитные весы | 1989 |
|
SU1631305A1 |
| АДАПТИВНОЕ ИНТЕГРИРУЮЩЕЕ УСТРОЙСТВО СИНХРОНИЗАЦИИ | 2012 |
|
RU2513024C2 |
| Стабилизированный преобразователь постоянного напряжения в постоянное с защитой | 1983 |
|
SU1089733A1 |
Изобретение относится к технике электроизмерений, а именно к точным способам и устройствам лабораторного типа, предназначенным для измерения токов и напряжений и электрических величин, приводимых к ним. Цель изобретения - повышение точности и быстродействия. При измерении используется встречное силовое воздействие измеряемой электрической величины и опорной механической величины на чувствительный элемент 1, снабженный электрическими контурами 6 и 7, грузоприемной чашкой 14 для образцовой гири 15, упругой подвеской 2 в виде рычагов 3 и 4 второго рода. Чувствительный элемент 1 связан со следящей системой с регулирующим усилителем 18, интегрирующим усилителем 19, а также контуром широтно-импульсной модуляции для опорного тока. В последний входят компаратор 35, генератор 36 пилообразного напряжения, делители 38 и 39 частоты, генератор 37 опорной частоты, источник 32 опорного тока, блок 33 коррекции, буферный блок 31, ключ 30. Результат измерения фиксируется счетчиком 40 импульсов и отображается на отсчетном блоке 41. Блок 42 коррекции введен для исключения влияния собственной массы чувствительного элемента 1 на результат измерений. 3 з.п. ф-лы, 5 ил.
Изобретение относится к электроизмерительной технике, а именно.к точным способам и устройствам для измерения токов и напряжений, а также других электрических величин, приводимых к ним.
Целью изобретения является повышение точности и быстродействия.
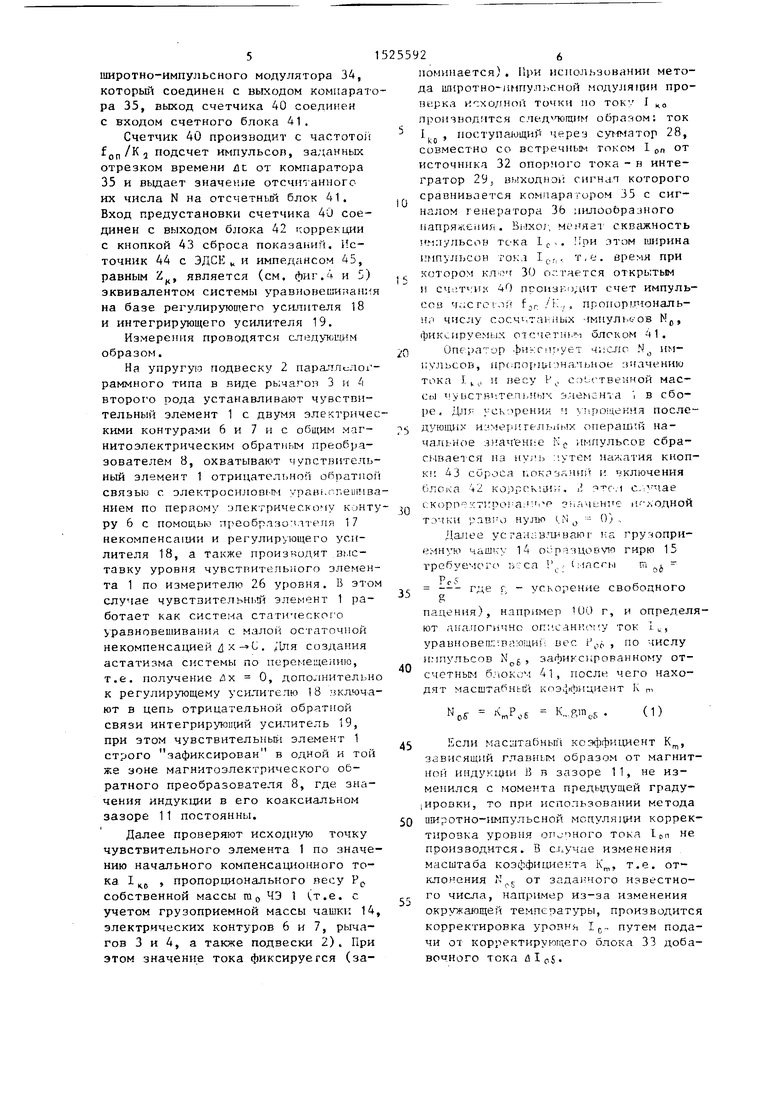
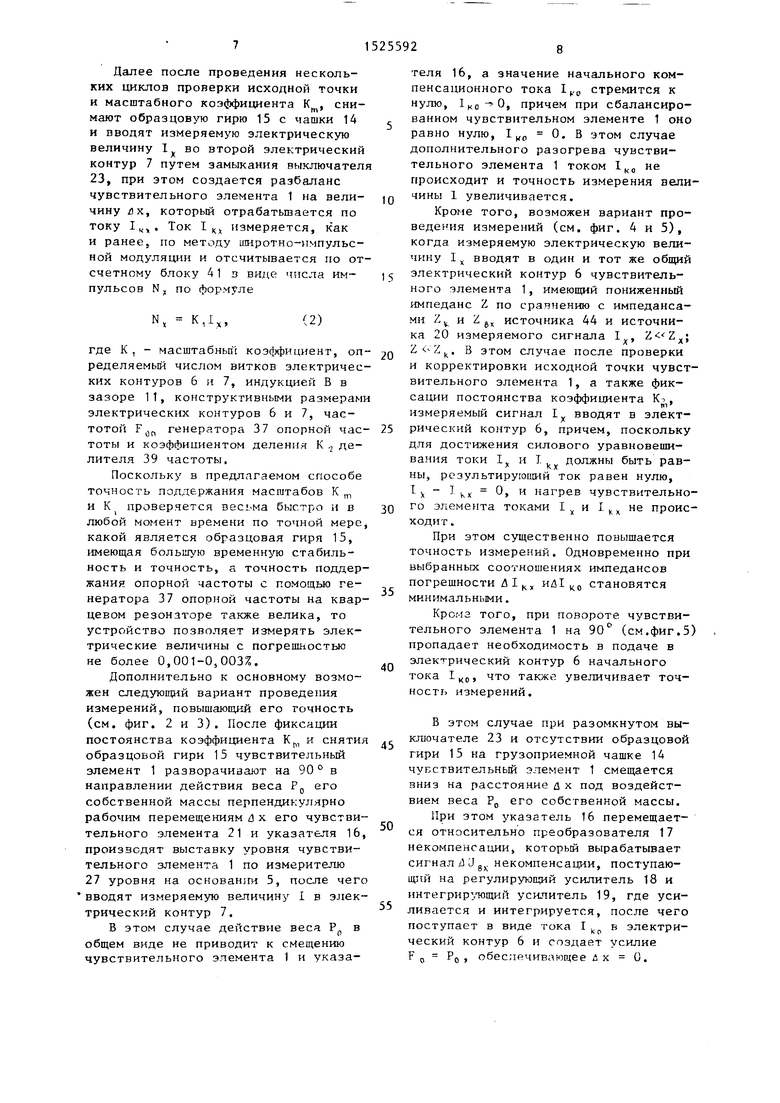
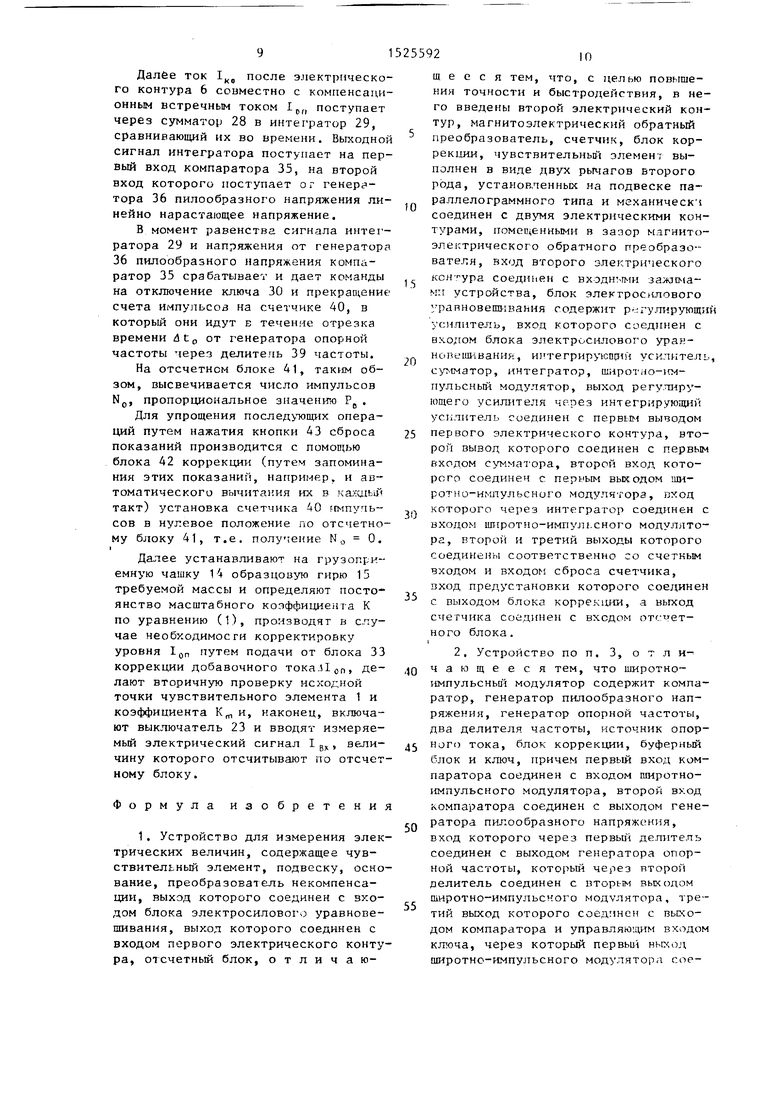
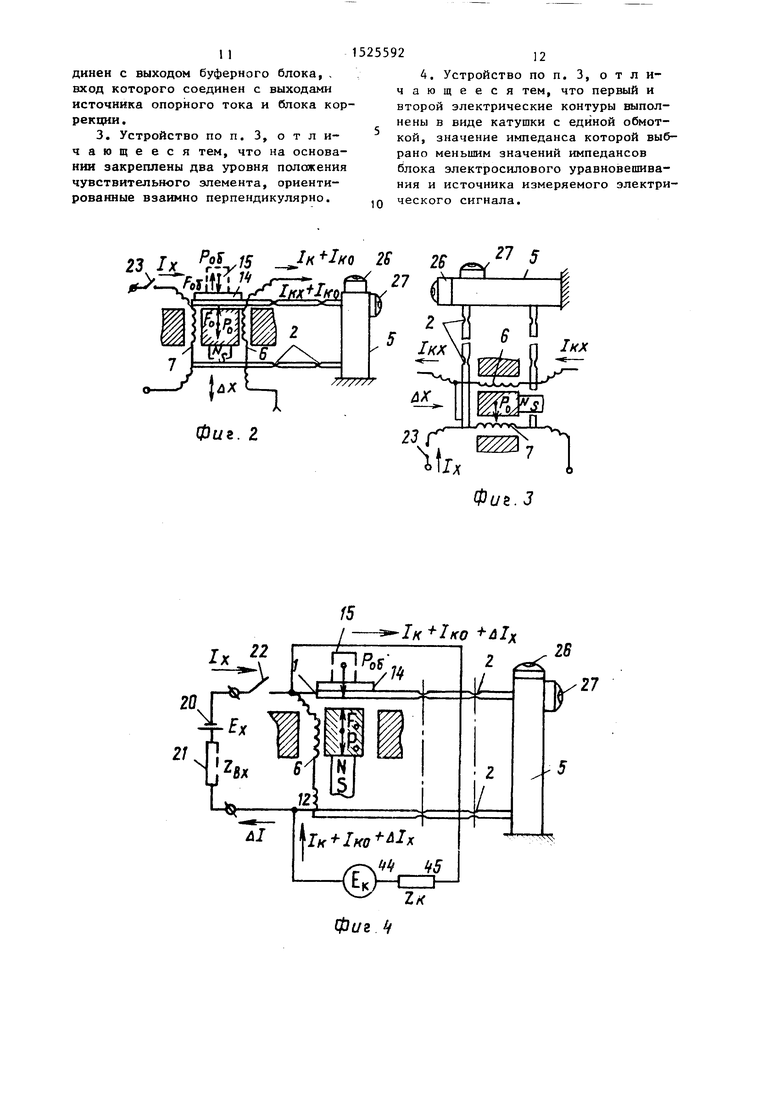
На фиг. 1 представлена схема устройства,для измерения электрических величин;на фиг.2 и 3 - варианты схем выполнения с разворотом чувствительного элемента на на фиг. 4 и 5 - варианты схем выполнения с подачей измеряемой электрической величины и компенсационного тока системы электросилового уравновешивания в один общий контур чувствительного элемента и с разворотом его на 90.
Устройство (фиг. 1) содержит чувствительный эпемент (ЧЭ) 1, выполненный подвижным и установленный через упругую подвеску 2 параллелограм ного типа в виде рычагов 3 и 4 второго рода, закрепленных на основании 5. Чувствительный элемент 1 снабжен двумя электрическими контурами 6 и 7, жестко механически связанными с ним, и общим магнитоэлектрическим обратным преобразователем 8 с магнитом 9 и ярмом 10, в коаксиальном зазоре 11 которого равномерно располагаются контуры 6 и 7, снабженные то- ковводами, выполненными безмоментны- ми 12 и 13. ЧЭ 1, кроме того, снабжен грузоприемной чашкой 14 для образцовой гири 15 и указателем 16 преобразователя 17 некомпенсации, реагирующего на рабочее перемещение дх чувствительного элемента 1 и выдающего электрический сигнал некомпенсации ли и соединенного с входами регулирующего усилителя 18, интегрирующего усилителя (ИУ) 19, работающего отдельно или совместно с первым, причем регулируюсщй и интегрирующий усилители 18 и 19 вырабатьшают компенсационные токи I ц или 1., в зависимости от режима работы чувствительного элемента 1.
Для правильной работы упругой подвески 2 ее плечи Ц, 1, 1,,, 1 выбираются попарно равными 1,
Ч 14Измеряемый электрический сигнал
в виде тока 1 от источника 20 с
электродвижущей силой Е с внутренним импедансом 21 (Zg) подключается через клеммы 22 и выключатель 23.
На взаимно перпендикулярных шо0 щадках 24 и 25 основания 5 под углом 90 друг относительно друга-установлены два измерителя 26 и 27 уровня, например, воздушно-жидкостного типа, определяющие уровни чувстви- тельного элемента 1.
Электрический контур 6 через то- ковводы 12 и сумматор 28 соединены с интегратором 29, к которому через ключ 30 и буферный блок 31 от источ0 ника 32 опорного тока, снабженного
блоком 33 коррекции, подается суммарное значение опорного тока -tfl (,„ . Преобразователь 17 некомпенсации соединен с входом блока электросшто5 вого уравновешивания. Регулирующий усилитель 18 и интегрирующий усилитель 19, сумматор 28, интегратор 29 вместе с широтно-импульсным модулятором 34 образуют блок электросилово0 Го ураановешивания.
В широтно-импульсный модулятор 34, кроме ключа 30, буферного блока 31 источника 32 опорного тока и блока 33 коррекции входят компаратор
5 35, генератор 36 пилообразного напряжения, генератор 37 опорной частоты и делители 38 и 39 частоты с коэффициентами деления К, и К, Входы компаратора 35 соединены соответст0 венно с выходами интегратора 29 и генератора 36 пилообразного напряжения, вход которого через делитель 38 подключен к выходу генератора 37 опорной частоты, второй выход
j которого через делитель 39 частоты соединен с вторым выходом mnpoTito- импульсного модулятора 34 и со счетным входом счетчика 40, вход сброса которого соединен с третьим выходом
51
широтно-импульсного модулятора 34, KOTopbDi соединен с выходом комиарато ра 35, выход счетчика 40 соединен с входом счетного блока 41.
Счетчик 40 производит с частото fgp/Kj подсчет импульсоп, заданных отрезком времени ut от компаратора 35 и выдает значение отсчи ) аныого их числа N на отсчетный блок 41. Вход предустановки счетчика 40 соединен с выходом блока 42 коррекции с кнопкой 43 сброса показаний. Источник 44 с ЭДСЕ 1 и импедансом 45, равным Z|, является (см, фиг.Д и 5) эквивалентом системы уравног}еи ипаиия на базе регулирующего усилителя 18 и интегрирующего усилителя 19.
Измерения проводятся следуюищм образом.
На упругую подвеску 2 паралл ло1 - раммного типа в виде рычагоп 3 н 4 второго рода устанавливают чувствительный элемент 1 с двумя элекгричес кими контурами 6 и 7 и с общим магнитоэлектрическим обратным преобразователем 8, охватывают чупствитель- ный элемент 1 отрицателтишй обратной связью с электросилов -р-1 упавкг лешмва нием по перпому электрическому конту ру 6 с помощью прсобр,-1зо:1лтеля 1 7 некомпенсапии и регулирующего усилителя 18, а также производят выставку уровня чувстнительного элемента 1 по измерителю 26 уровня. В этом случае чувствительньй элемент 1 работает как системя статическог о уравновешивания с малой остаточной некомпенсадией 4 Лля создания астатизма системы по перемещению, т.е. получение Дх О, допо,/ 1нительно к регулирующему усилителю 18 жлюча- ют в цепь отрицательной обратной связи интегрирующий усилитель 19, при этом чувствительный элемент 1 строго зафиксирован в одной и той же зоне магнитоэлектрического обратного преобразователя 8, где значения индукции в его коаксиальном зазоре 11 постоянны.
Далее проверяют исходную точку чувствительного элемента 1 по значению начального компенсационного тока I , пропорционального весу Р,, собственной массы m ЧЭ 1 (т.е. с учетом грузоприемной массы чашки 14, электрических контуров 6 и 7, рычагов 3 и 4, а также подвески 2). При этом значение тока фиксируется (за5255926
поминается). При использовании метода широтно-импул))Сной модуля1р1И проверка исходной точки но TOKV I
производится образом: ток - 1 , поступающий через 28, совместно со встречным током 1 (,„ от источника 32 опорного тока - в интегратор 29, выходной сигнал которого
сравнивается компаратором 35 с сигналом генератора 36 пилообразного напряжения. , меняат скважность импульсов тс ка L , . Пои этом ипфина ипп льсов гокл If.r,., т,е. время при
котором 30 ос-тается открытым и сч;;тг:ик 40 лроизр.одит счет импульсов ч;;сго1-1Й f.,r /1, пронорглюналь- нл числу сосч1,та1-;ных iMnynbtoB N, фик :ируемых отсчетнь блоком 41.
Опера гор фиь:г 1Г ует ч;;сло N импульсов, пр(:порц глн г 1ьное значению тока I-1., и весу Р , с;з1:гтвенной массы чуFJCTKUTe.niJthix элемента , в сборе. Для ;-ск:)рения ч у рО цения последующих и: л)е1:1ителг.11ых операций начальное з);ач ен1;е К л импульсов сбрасывается на нуль : утем нажатия кнопки 43 сброса iiOKrisaHHiT ;; включения ч2 KOjipcMin;-;. Л этГ .-1 c/i - iae CKopp -7T5:poraiMipp jriaMt-iHiie исходной тэчки p.-iBS o нулю (,N , - 0) ,
Далее ус raHiiBJinBawr на грузопри- емную чашку 14 о;- -рт;щовую гирю 15 требуемого i::ca Р ,- iMncrw m , --- где г, - ускорение свободного g
падения), например U)0 г, и определяют яь алогично .сан}.г у ток 1., уравновегигшаюгди ; вес 1:, , по числу импульсов Npg, зафиксированному от- счетньм блоком 41, после чего находят масштабньы коэ41фицне т К гп
NO K,,.gm,,5 .(1)
Если масштабный коэа)фициент К, зависящий главным образом от магнитной В в зазоре 11, не изменился с момента предыдущей граду- |Ировки, то при использовании метода
ииротно-импульсной модуляIp :и корректировка уровня ОГ10ПНОГО тока It,n не производится. В с.Глучае изменения масштаба коэффициента К, т.е. отклонения с от зада1-:ного известного числа, например из-за изменения окружающей температуры, производится корректировка уровня 1р. путем подачи от корректирующего блока 33 добавочного тока Л1р5.
Далее после проведения нескольких циклов проверки исходной точки и масштабного коэффициента К, снимают образцов то гирю 15 с чашки 14 и вводят измеряемую электрическую величину 1 во второй электрический контур 7 путем замыкания выключателя 23, при этом создается разбаланс чувствительного элемента 1 на величину лх, который отрабатьшается по току 1ц. Ток I 1,, измеряется, к ак и ранееS по методу широтно-импульс- ной модуляции и отсчитывается по от- счетному блоку 41 з виде числа импульсов N., по формуле
N. К,1,
(2)
где К, - масштабньш коэ4л1)ициент, оп- ределяемьм числом витков электрических контуров 6 и 7, индукцией В в зазоре 11, конструктивными размерами электрических контуров 6 и 7, частотой Fjjf, генератора 37 опорной час- тоты и коэффициентом деления К делителя 39 частоты.
Поскольку в предлагаемом способе точность поддержания масштабов К и К проверяется весьма быстро и в любой момент времени по точной мере, какой является образцовая гиря 15, имеющая большую временную стабильность и точность, а точность поддержания опорной частоты с помощью генератора 37 опорной частоты на кварцевом резонаторе также велика, то устройство позволяет измерять электрические величины с погрешностью не более 0,001-0,003%.
Дополнительно к основному возможен следующий вариант проведения измерений, повышаю 1;ий его точность (см. фиг. 2 и 3). После фиксации постоянства коэффициента К, и снятия образцовой гири 15 чувствительный элемент 1 разворачивают на 90 ° в направлении действия веса Рд его собственной массы перпенди :улярно рабочим перемещениям л х его чувствительного элемента 21 и указателя 16, производят выставку уровня чувствительного элемента 1 по измерителю 27 уровня на основан1ги 5, после чего вводят измеряемую величину 1 в электрический контур 7.
В этом случае действие веса Р в общем виде не приводит к смещению чувствительного элемента 1 и указа
теля 16, а значение начального компенсационного тока стремится к нулю, причем при сбалансированном чувствительном элементе 1 оно равно нулю, 0. В этом случае дополнительного разогрева чувствительного элемента 1 током I не происходит и точность измерения величины 1 увеличивается.
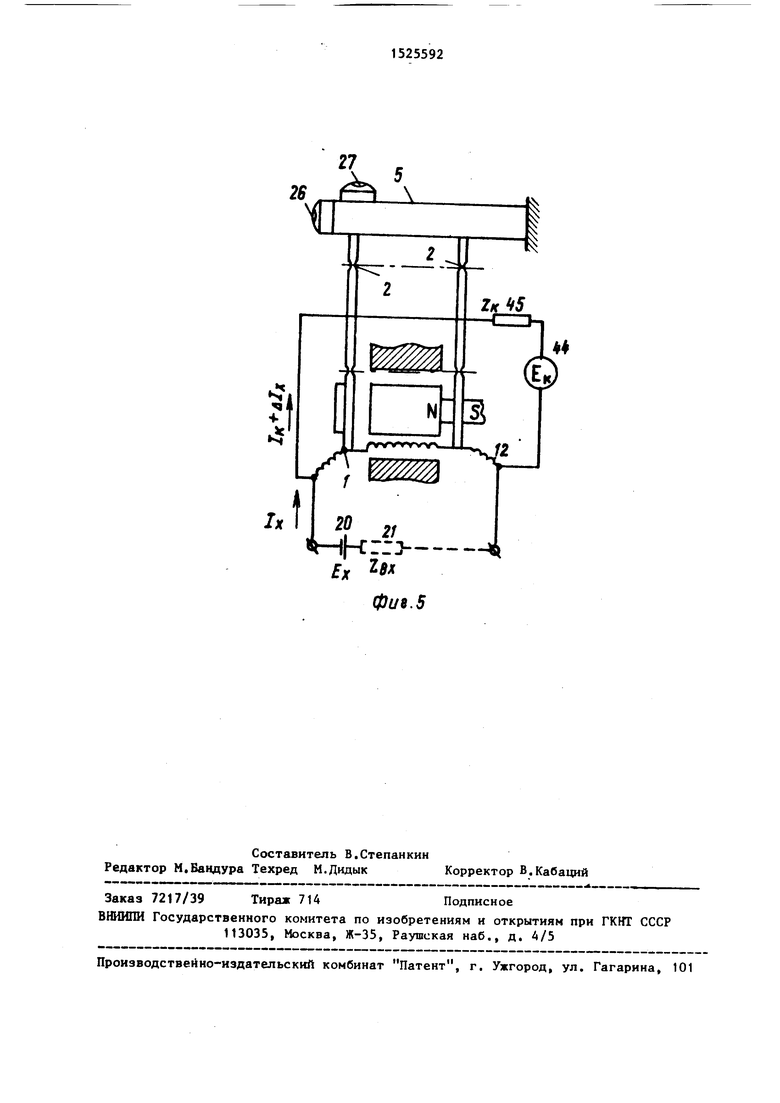
Кроме того, возможен вариант проведения измерений (см. фиг. 4 и 5), когда измеряемую электрическую величину I вводят в один и тот же общий электрический контур 6 чувствительного элемента 1, имеющий пониженный импеданс Z по сравнению с импеданса- ми 2 и Zj источника 44 и источника 20 измеряемого сигнала 1, ,;
. В этом случае после проверки и корректировки исходной точки чувствительного элемента 1, а также фиксации постоянства коэффициента К,
ТП
измеряемый сигнал 1 вводят в электрический контур 6, причем, поскольку для достижения силового уравновешивания токи 1 и 1 должны быть равны, результирующий ток равен нулю.
5
О 0
0
5
Ч кх О, и нагрев чувствительного элемента токами I и I не происходит .
При этом существенно повышается точность измерений. Одновременно при выбранных соотношениях импедансов погрешности 4 1ц, нй1 становятся минимальными.
Кромг того, при повороте чувствительного элемента 1 на 90 (см.фиг.5) пропадает необходимость в подаче в электрический контур 6 начального тока что также увеличивает точность измерений.
В этом случае при разомкнутом выключателе 23 и отсутствии образцовой гири 15 на грузоприемной чашке 14 чувствительньй элемент 1 смещается вниз на расстояние л х под воздействием веса РО его собственной массы.
При этом указатель 16 перемещается относительно преобразователя 17 некомпенсации, которьй вырабатывает сигнал Л LI g некомпенсации, поступающий на регулирующий усилитель 18 и интегрир тощий усилитель 19, где усиливается и интегрируется, после чего поступает в виде тока I . в электрический контур 6 и создает усилие F о РО ) обеспечивающее Д х 0.
Далее ток 1 после электрического контура 6 совместно с компенсационным встречным током I;,,, поступает через сумматор 28 в интегратор 29, сравнивающий их во времени. Выходной сигнал интегратора поступает на первый вход компаратора 35, на второй вход которого поступает о г генер; - тора 36 пилообразного напряжения линейно нарастающее напряжение.
В момент равенства сигнала интегратора 29 и напряжения от генератора 36 пилообразного напряжения компаратор 35 срабатывает и дает команды на отключение ключа 30 и прекращение счета импульсоз на счетчике 40, в который они идут Б течение отрезка времени ut от генератора опорной частоты через делитель 39 частоты.
На отсчетном блоке 41, таким об- зом, высвечивается число импульсов Np, пропорциональное значенита Р.
Для упрощения послед тощих операций путем нажатия кнопки 43 сброса показаний производится с помощью блока 42 коррекции (путем запоминания этих показаний, например, и автоматического вычитания их в ка вдь1Й такт) установка счетчика 40 ямпупь- сов в нулевое положение по отсчетному блоку 41, т.е. получение NO 0. I
Далее устанавливают на грузопрк-- емную чашку 14 образцовую гирю 15 требуемой массы и определяют постоянство масштабного коэффициента К по уравнению (1), производят в случае необходимости корректировку уровня Ion путем подачи от блока 33 коррекции добавочного токаЛ«п де лают вторичную проверку исходной точки чувствительного элемента 1 и коэффициента К и, наконец, включают выключатель 23 и вводят измеряеВх
ве-лимый электрический сигнал I чину которого отсчитывают по отсчет- ному блоку.
Формула изобретения
10
20
25
30
35
40
-
45
50
55
щ е е с я тем, что, с целью повышения точности и быстродействия, в него введены второй электрический контур, магнитоэлектрический обратный преобразователь, счетчик, блок коррекции, чувствительный элемент выполнен в виде двух рычагов второго рода, установленных на подвеске па- раллелограммного типа и мгханическ соединен с двумя электрическими контурами, помещенными в зазор магнито- эле ;трического обратного преобразователя, вход второго электрического KCH .ypa соединен с входнт.гми зажима- MI устройства, блок электрос 1лового урапновешивания содержит регулирующий усилитель, вход которого соединен с входом блока электросилового уран- нопеш11вания, И1 тегрируюпр1й усилитель, с т--1матор, интегратор, 1Ш1ротио-и 1- пульсный модулятор, выход регу. ющего усилителя через интегрирующий услглитель соединен с первьм выводом первого электрического контура, второй вывод которого соединен с первым входом cv MMaTopa, второй вход которого соединен с первым выходом ши- ротио-импульсного модулятора, вход которого через интегратор соединен с входом 1Ш1ротно-импул1,сного модулятора, второй и третий выходы которого соединены соответственно со счетным входом и входом сброса счетчика, вход предустановки которого соединен с выходом блока коррекции, а выход с гетчика соединен с входом ного блока.
динен с выходом буферного блока, , вход которого соединен с выходами источника опорного тока и блока коррекции.
Фиг
152559212
второй электрические контуры выполнены в виде катушки с единой обмоткой, значение импеданса которой выбрано меньшим значений импедансов блока электросилового уравновешивания и источника измеряемого электрического сигнала.
7К 7 5 f I
IHX
Фи.З
IK +Л1)(
2В 27
Ex фи9.5
| КОМПЕНСАТОР НАПРЯЖЕНИЯ ИЛИ ТОКА | 0 |
|
SU265270A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Тюрин Н.И | |||
| Введение в метрологию | |||
| М.: Иэд-во Стандартов, 1973, с.62-64. | |||
