ный регулируемый усилитель 20 низкой частоты. Введение новых элементов и образование новых связей между эле- ментямн устройства нозволяет при любых амнлитудах и фазах помех в начале и в конце цикла измерения ноддерf
Изобретение относится к весоизмерительной технике, в частности к весам с электромагнитной системой уравновешивания.
Цель изобретения - повышение быст- родействия.
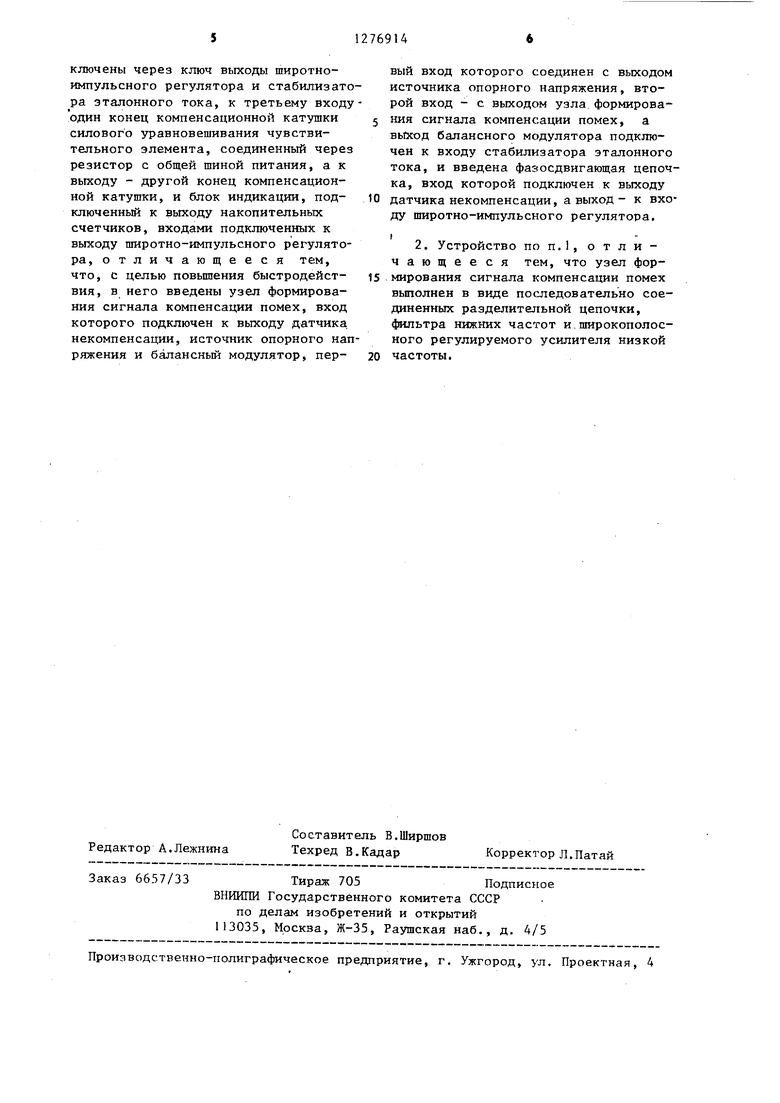
На чертеже показана структурная схема цифрового весоизмерительного устройства.
Устройство содержит чувствитель- ный элемент 1 (груэоприемное устройство) с датчиком 2 некомпенсации (датчик перемещения), резистор 3, узел 4 коррекции, интегрирую1Г1Ий ши- ротно-импульсный регулятор 5, ключ 6, стабилизатор 7 эталонного тока, накопительные счетчики 8, блок 9 индикации, компенсационную катушку 10, развязывающий усилитель 1I, балансный модулятор 12, вьтолненный на one рационном усилителе 13, резистор 14 в составе источника 15 опорного напряжения, узел 16 формирования сигнала компенсации помех, состояпщй из конденсатора 17 разделительной цепоч ки 18, имеющей резистор 19, регулируемого широкополосного усилителя 20 низкой частоты и фильтра 21. нижних частот, и фазосдвигающую цепочку 22.
Входы узла 4 коррекции, фазосдви- гающей цепочки 22 и узла 16 формирования сигнала компенсации помех подключены к выходу датчика 2 некомпенсации,
К входам развязывающего усилителя 11 подключены выходы узла 4 коррекции, регулятора 5 и стабилизатора 7 (через ключ 6) и один конец компенсационной катушки 10, соединешчый через резистор 3 с общей шиной питания Другой конец катушки 10 сое,15инен с выходом развязывающего усилителя 11,
Источник 15 опорного напряжения ; подключен к первому входу ба-пансного
живать постоянство среднего значения проинтегрированной величины сигнала, благодаря чему числовое значение в счетчиках 8 оказывается независимым, от измерений, что сокрап1;ает время измерения, 1 з.п, ф-лы, 1 ил.
модулятора 12, второй вход которого соединен с выходом узла 16, а выход - с входом стабилизатора 7 эталонного тока,
. Вход регулятора 5 соединен с выходом фазосдвигающей цепочки 22, а выход подключен к входу ключа 6 и входам накопительных счетчиков 8, выходы которых соединены с блоком 9 индикации.
Узел 16 образован из последовательно соединенных разделительной цепочки 18, фильтра 21 нижних частот и усилителя 20,
Балансный модулятор 12 предназначен для компенсации влияния помех на формирование среднего значения уровно- вешивающего тока в катушке 10, он осуществляет модуляцию опорного напряжения сигналом помехи: при положитель- ном приращении длительности импульса регулятора 5 получают пропорциональное отрицательноб; приращение тока стабилизатора 7,
Узел 16 осуществляет вьщеление переменной составляющей помехи из входного сигнала с помощью конденсатора 17, при этом постоянная времени цепи 18 выбирается порядка.одной секунды и более.
Назначением фильтра 2I является ослабление амплитуды переменных составляющих, находящихся за границей полосы пропускания системы автоматического уравновешивания (обычно 20-30 Гц).
Фазосдвигающая цепочка 22 служит для согласования фазовых сдвигов.
Устройство работает следующим образом,
В установившемся режиме чувствительный элемент 1 (грузопрнемное устройство) уравновешивается электромагнитной силой, создаваемой током JK компенсационной катушки 10.
При изменении груза перемещается чувствительный элемент 1 и сигнал с датчика 2 с помощью регулятора 5 изменяет длительность замьжания ключа 6.
В результате изменения среднего тока компенсационной катушки 10 гру зоприемное устройство возвращается в исходное уравновешенное положение.
Сигнал регулятора 5 поступает также на накопительные счетчики 8, вы- пояняющие функцию цифрового интегрирования.
Заданную .точность измерения обеспечивают стабилизатор 7 эталонного тока и источник 15 опорного напряжения.
Устойчивость системы регулирова- ния обеспечивает узел 4, вводящий сигналы первой и второй производных от сигнала, поступающего с датчика 2 некомпенсации.
На второй вход балансного модуля- тора 12 поступает сигнал переменной составляющей, пропорционапьный по величине сигналу помех, действующему на входе регулятора 5. При этом вьщеление переменной составляющей помех осуществляется с помощью разделительной цепи 18, а вход широкополосного регулируемого усилителя 20 низкой частоты защищен от воздействия перегрузок на верхних частотах переменной составляющей помех фильтром 21 нижних частот.
Воздействие вибраций на чувствительный элемент весов эквивалентно появлению переменной составляющей в ускорении свободного падения, например синусоидальной, а следовательно, появлению кажущегося изменения мгновенного значения измеряемой массы. При этом с датчика 2 на вход щирот- но-импульсного регулятора 5 поступает промодулированное частотами вибраций напряжение, изменяющее моменты закрывания ключа 6. Это же напряже- ние поступает на вход узла 16 формирования сигнала компенсации помех, частотные свойства которого выбираются такими, чтобы обеспечить минимальное запаздывание переменных состав- ляклцих помехи в тракте компенсации о выхода датчика 2 до второго входа ключа 6.
Регулировкой коэффициента усршени в канале вьщеления переменной составляющей достигается требуемьм уровен модуляции опорного напряжения синфач ной составляющей помехи.
Узел 16 формирования сигнала компенсации помех выделяет и усиливает переменную составляющую помех для того, чтобы интегрирование выходного сигнала щиротно-импульсного регулятора 5 как в цифровой (накопительные счетчики), так и в аналоговый (развязывающий усилитель 11), совпадало, т.е. приращение длительности широтно импульсного сигнала под воздействием помех сопровождалось пропорционалылг уменьшением среднего за период широт но-импульсного значения выходного тока стабилизатора 7 эталонного тока
При этом интегрирование (усреднение) полезного сигнала в накопительных счетчиках В не зависит от амплитуды и фазы сигналов помех, благ ода- ря чему снижается до минимума количество циклов усреднения (время накопления) и при полном совпадении значений интегралов, полученных в цифровой и аналоговой формах, достаточно одного первого цикла измерения установившегося значения с последую- mjiM совпадением всех остальных результатов с разбросом не более одной единицы на миллион.
Применение в цифровой системе балансного модулятора, источника опорного напряжения, схемы формирования сигнала компенсации помех, фазосдви- гающего звена и соответствующих электрических связей позволяет при любых амплитудах и фазах помех в начале и в конце цикла измерения поддерживать постоянство среднего значения проинтегрированной величины сигнала, благодаря чему числовое значение в накопительных счетчиках оказывается независимым от измерения к измерению, что сокращает время измерения до 2- 3 с при времени цифрового интегрирования 1 с.
Формула изобретения
1. Цифровое весоизмерительное устройство, содержащее чувствительный элемент с датчиком некомпенсации, подключенным через узел корреюхии к первому входу развязывающего усилителя, к второму входу которог о годключены через ключ выходы широтно- импульсного регулятора и стабШ1;из агора эталонного тока, к третьему входу один конец компенсационной катушки силового уравновешивания чувствительного элемента, соединенный через резистор с общей шиной питания, а к выходу - другой конец компенсационной катушки, и блок индикации, под- ключенный к выходу накопительных счетчиков, входами подключенных к выходу пгаротно-импульсного регулятора, отличающееся тем, что, с целью повьппения быстродейст- ВИЯ, в него введены узел формирования сигнала компенсации помех, вход которого подключен к выходу датчика, некомпенсации, источник опорного напряжения и балансный модулятор, пер-
Редактор А.Лежнина Заказ 6657/33
Составитель В.Ширшов Техред В.Кадар
Корректор
Тираж 705Подписное
ВНИИШ Государственного комитета СССР
по делам изобретений и открытий 113035, Москва, Ж-35, Раушская наб., д. 4/5
Производственно-полиграфическое предприятие, г. Ужгород, ул. Проектная, 4
вый вход которого соединен с выходом источника опорного напряжения, второй вход - с выходом узла формирова- 1шя сигнала компенсации помех, а балансного модулятора подключен к входу стабилизатора эталонного тока, и введена фазосдвигающая цепочка, вход которой подключен к выходу датчика некомпенсации, а выход - к входу широтно-импульсного регулятора.
2. Устройство по п.1, отличающееся тем, что узел фор- .мирования сигнала компенсации помех выполнен в виде посшедовательно соединенных разделительной цепочки, фильтра нижних частот и.широкополосного регулируемого усилителя низкой частоты.
Корректор Л.Патай
| название | год | авторы | номер документа |
|---|---|---|---|
| Цифровая система автоматической регистрации веса | 1980 |
|
SU960540A1 |
| Цифровая система автоматической регистрации веса | 1983 |
|
SU1081426A1 |
| Цифровая система автоматической регистрации веса | 1986 |
|
SU1434269A2 |
| Автоматические весы | 1986 |
|
SU1364892A1 |
| Цифровые электромагнитные весы | 1989 |
|
SU1631305A1 |
| Электронные цифровые весы | 1980 |
|
SU943533A1 |
| Весоизмерительное устройство | 1988 |
|
SU1578497A1 |
| Электронные цифровые весы | 1980 |
|
SU932260A1 |
| Устройство уравновешивания весов | 1991 |
|
SU1778546A1 |
| Стабилизатор постоянного регулируемого тока | 1983 |
|
SU1112353A1 |
Изобретение относится к измерительной технике и позволяет повысить .быстродействие устройства, которое содержит компенсационную катушку 10, датчик перемещения 2, интегрирующий широтно-импульсный регулятор 5 тока компенсационной катушки 10, ключ 6 со стабилизатором 7 эталонного тока, накопительные счетчики 8, блок 9 индикации, узел 4 коррекции с развязывающим усилителем 11. Для повышения быстродействия в цифровую систему введены балансный модулятор 12, источник 15 опорного напряжения, узел 16 формирования сигнала коьшенсации помех, фазосдвигающую цепочку 22, узел 16 формирования сигнала компен- :сации помех содержит последовательно включенные разделительную цепь 18, фильтр 21 нижних частот, широкополосс (Л W J ю sj О5 СО ,7 X го,™гггг1 ,1 i г-сЬ ГйГГ Hi L±j rt
| Весоизмерительное устройство | 1980 |
|
SU870960A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Цифровая система автоматической регистрации веса | 1980 |
|
SU960540A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
