Изобретение относится к cpeflCTsaN гидроавтоматики, в частности к электрогидравлическим системам управления механизмами с резервированием.
Цель изобретения - упрощение конструкции и улучшение энергомассовых характеристик путем снижения числа параллельно включенных распределительных устройств и исключения шун- тирования линии гидропитания линией слива при отказе.
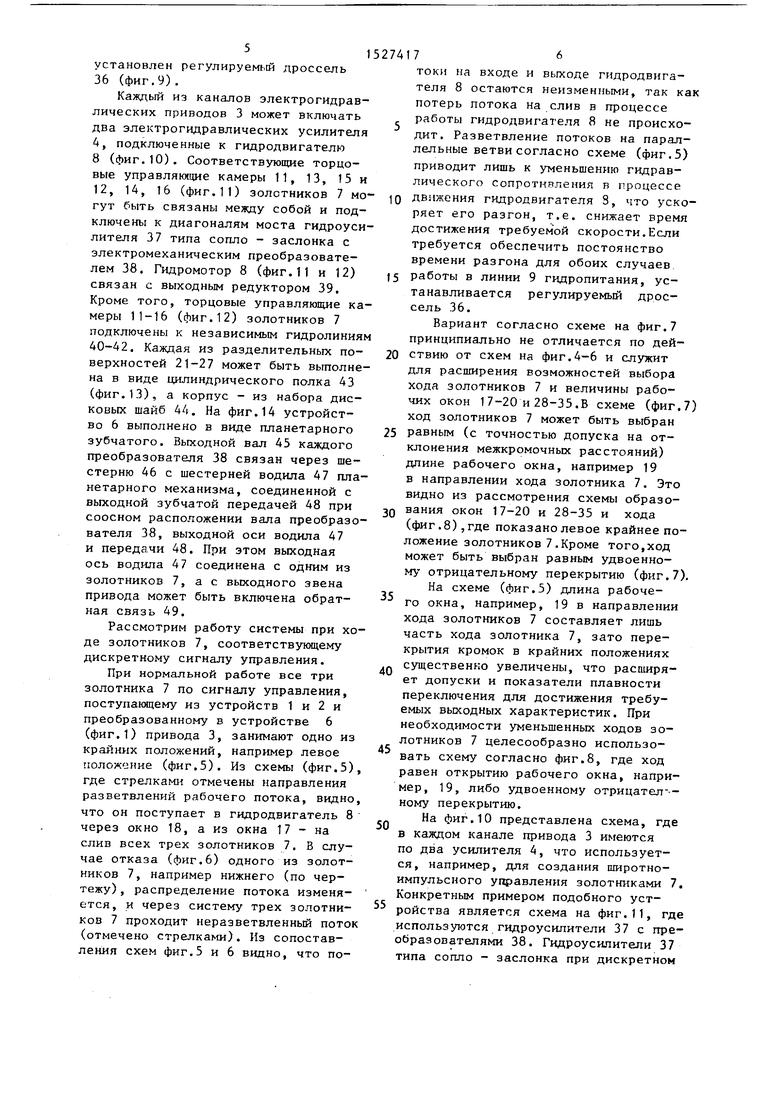
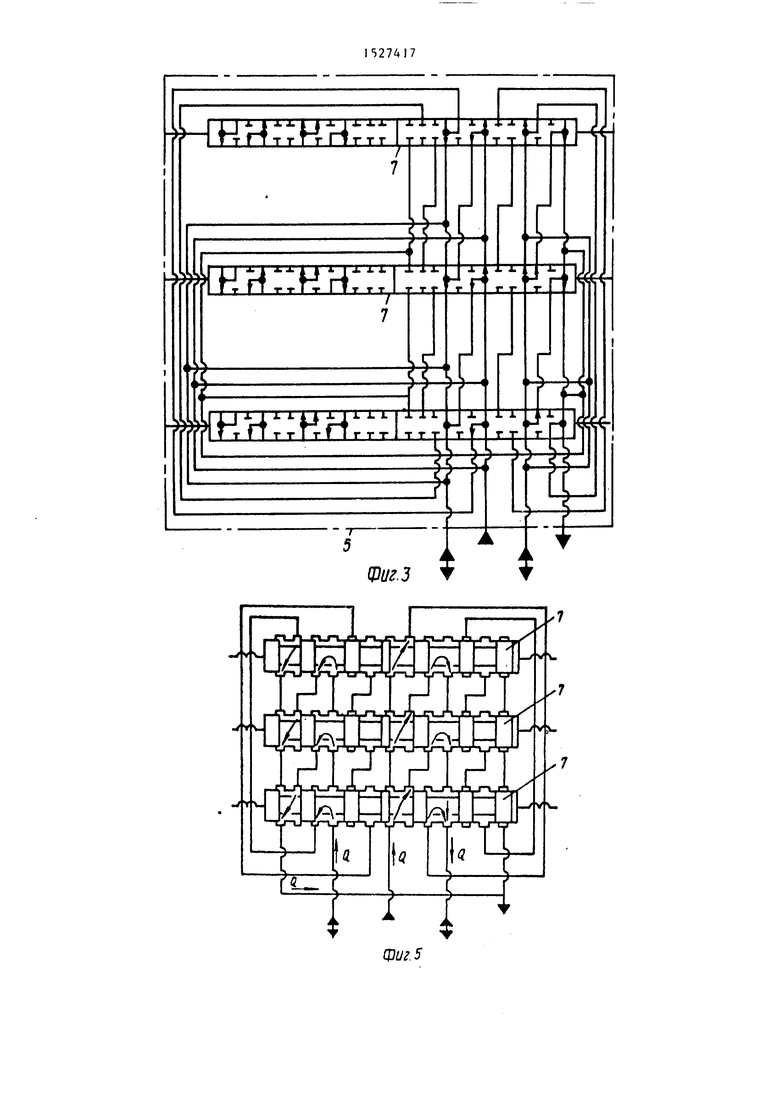
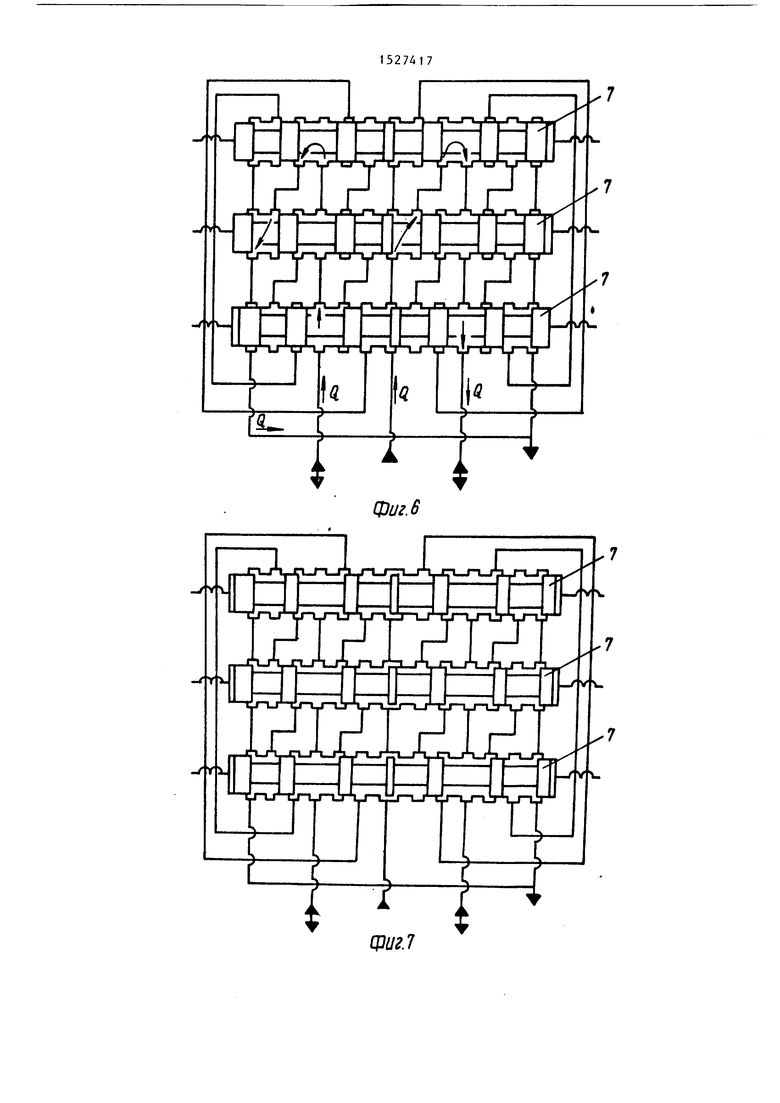
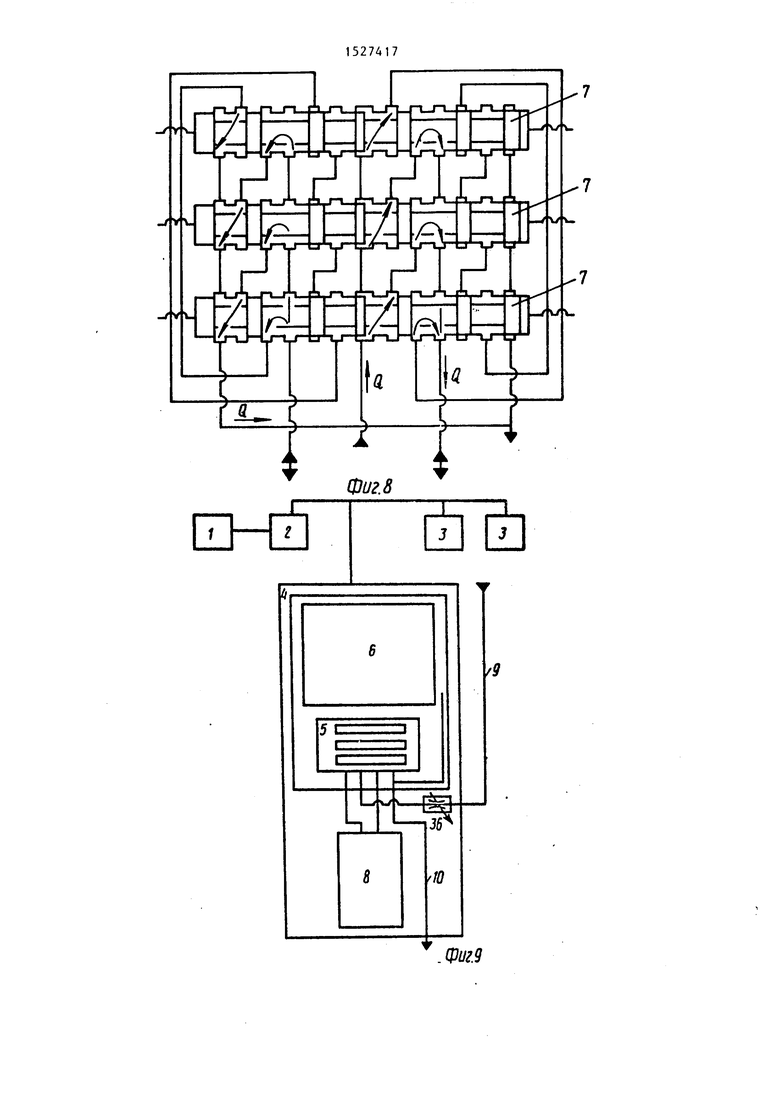
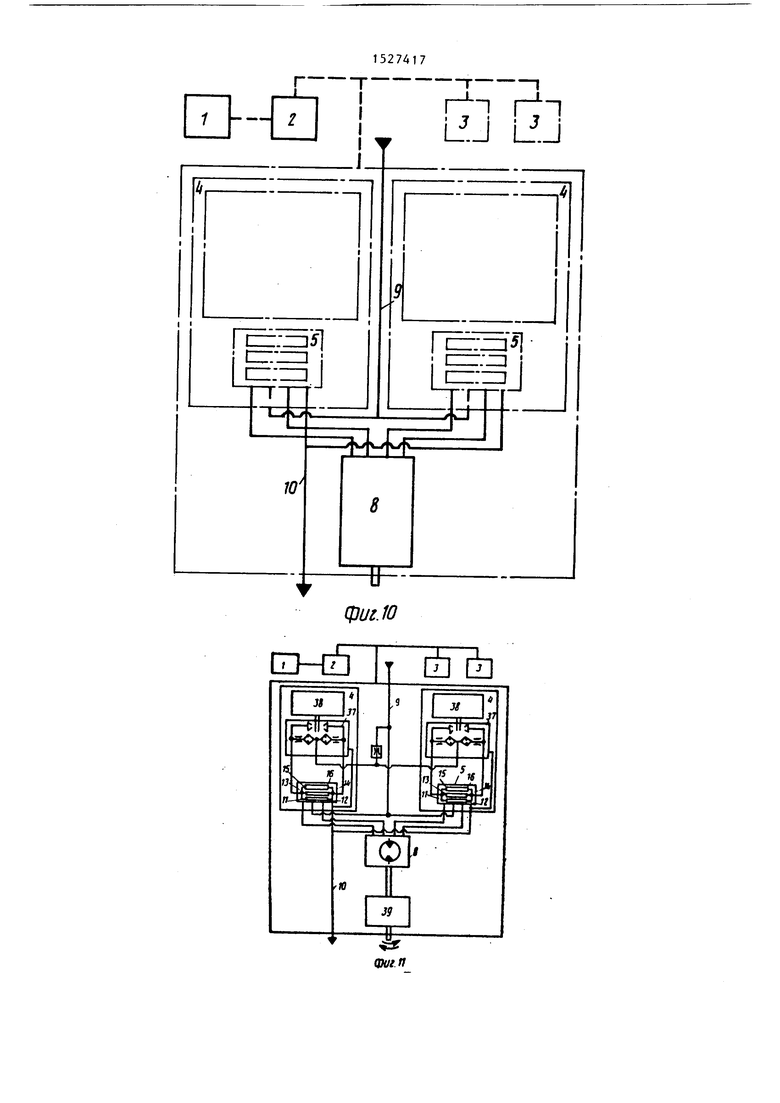
На фиг.1 представлена схема системы с поэлементным резервированием распределительных устройств ; на фиг. 2 принципиальная схема для крайнего левого положения золотников;на фиг. 3 то же, для крайнего правого положения золотников; на фиг.4 - схема распределительного устройства с положительным (или нулевым) перекрытием в среднем положении; на фиг.5 - то же, в левом положении; на фиг.6 - то же, в правом положении; на фиг.7 схема распределительного устройства с отрицательным перекрытием в среднем положении; на фиг.8 - то же, в левом положении; на фиг.9 - схема системы с дросселем; на фиг,10 - то же, с поэлементным резервированием распределительных устройств в двух гидроусилителях; на фиг.11 - то же, с параллельным управлением резервируемыми элементами; на фиг.12 - то же, с независимым управлением резервируемыми элементами; на фиг.13 - конструктивная схема распределительного устройства с корпусом, выполненным в виде набора гильз ;на фиг. 14 схема системы с электрическим управлением распределительных устройств.
Электрогидравлическая система управления (фиг.1) содержит электронные устройства 1 и 2 преобразования и усиления сигнала управления,многоканальный электрогидравлический привод 3, каждьй из каналов которого включает электрогидравлический усилитель 4 с расутределительным устройством 5 и устройством 6 управления. Распределительное устройство 5 выполнено в виде по меньшей мере трех золотников 7 и подключено к гидродвигателю 8, линиям гидропитания 9 и слива 10.
Каждый из трех золотников 7 уста- новлен в корпусе (фиг.4) с образованием торцовых управляющих камер 11 - 16, при этом в корпусе выполнены че
5
0
5
Q
5
0
5
0
0
5
тыре окна 17-20 на каждый золотник 7, два из которых (окна 17 и 18) подключены к гидродвигателю 8, а два других окна 19 и 20 - к линиям гидропитания 9 и слива 10. Каждый из золотников 7 выполнен с тремя основными разделительными поверхностями 21-23 и четырьмя дополнительными разделительными поверхностями 24-27,попарно и симметрично расположенными относительно окон 17 и 18, а в корпусе выполнены дополнительные окна 28-35, попарно расположенные относительно каждой дополнительной поверхности 24-27, при этом каждое дополнительное окно, например 28, предыдущего золотника 7 связано с противоположным относительно соответствующей дополнительной поверхности 24 окном 29 последующего золотника 7.
На схеме (фиг.4) показано среднее положение золотников 7 при их поясковом отсечном исполнении с нулевым перекрытием кромок. Конструктивное вьтолнение золотников 7, представленных на фиг.5-8, совпадает с конструктивным выполнением золотников 7, представленных на фиг.4. Из схем (фиг.4 и 5) видно, что в случае вьшолнения золотников 7 с нуле- вьп или положительным перекрытием в крайних положениях имеются существенно увеличенные перекрытия, обеспечивающие постепенное переключение каналов (не обозначены),но приводящие к ходу золотников 7, увеличенному на величину перекрытия в крайнем положении. Ход золотников 7 в этом случае равен или меньше половины длины рабочих окон 17-20 и 28-35 в направлении хода иодвижной части. На фиг.6 средний и верхний (по чертежу) золотник 7 занимают крайнюю левую ПОЗИ1Д1Ю, а нижний - правую позицию, что соответствует ситуации отказа, т.е. когда один из золотников 7 остается на месте после подачи на него сигнала управления, либо не доходит до своего положения. В данном случае это нижний (по чертежу) золотник 7. Золотники 7 на фиг.7 и 8 показаны с отрицательным перекрытием, при этом их ход из среднего положения составляет величину не менее отрицательного перекрытия. В линии 9 гидропитания может быть
5
установлен регулируемьй дроссель 36 (фиг.9).
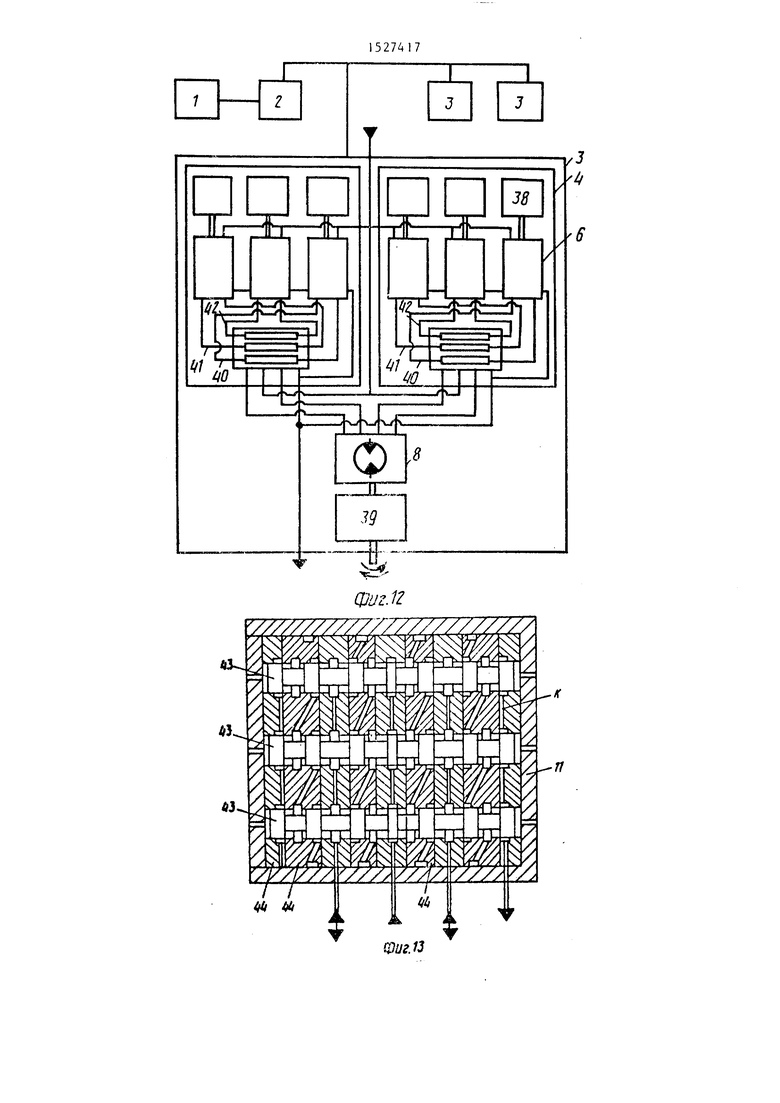
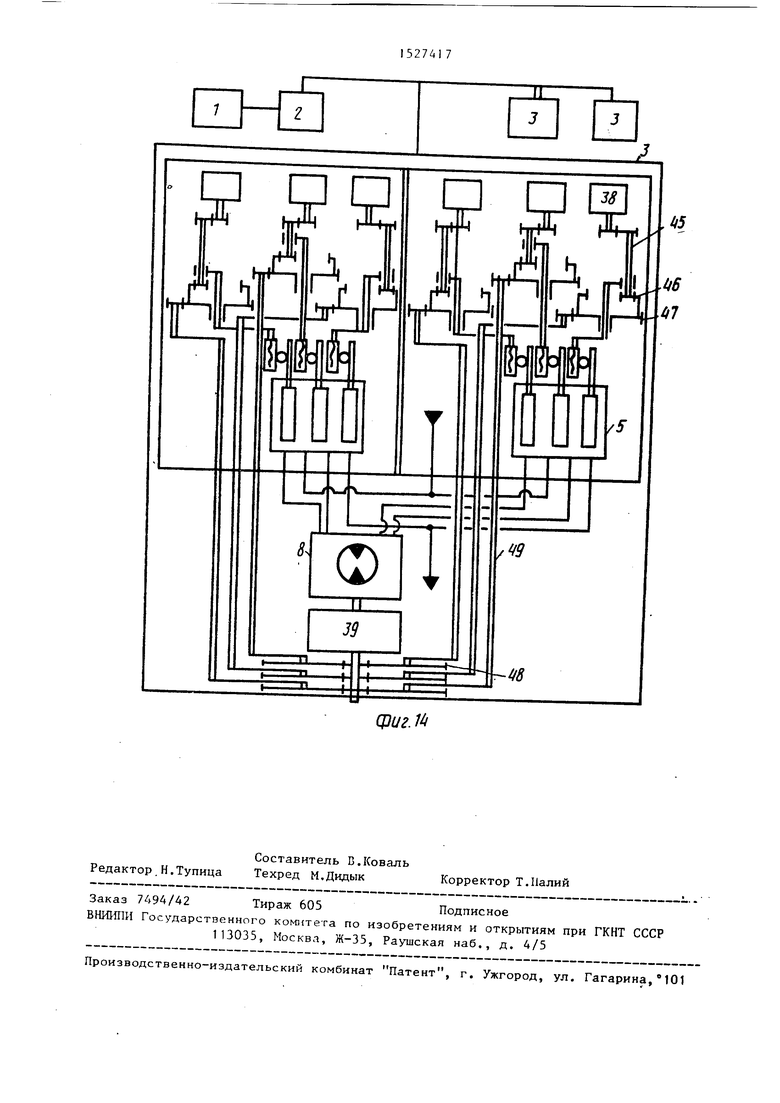
Каждый из каналов электрогидравлических приводов 3 может включать два электрогидравлических усилителя 4, подключенные к гидродвигательэ 8 (фиг.10). Соответствующие торцовые управляющие камеры 11, 13, 15 и 12, 14, 16 (фиг.11) золотников 7 могут быть связаны между собой и подключены к диагоналям моста гидроусилителя 37 типа сопло - заслонка с электромеханическим преобразователем 38. Гидромотор 8 (фиг.11 и 12) связан с выходным редуктором 39. Кроме того, торцовые управляющие камеры 11-16 (фиг.12) золотников 7 подключены к независимым гидролиния 40-42. Каждая из разделительных поверхностей 21-27 может быть выполнена в виде цилиндрического полка 43 (фиг.13), а корпус - из набора дисковых шайб 44. На фиг.14 устройство 6 выполнено в виде планетарного зубчатого. Выходной вал 45 каждого преобразователя 38 связан через шестерню 46 с шестерней водила 47 планетарного механизма, соединенной с выходной зубчатой передачей 48 при соосном расположении вала преобразователя 38, выходной оси водила 47 и передачи 48. При этом выходная ось водила 47 соединена с одним из золотников 7, а с выходного звена привода может быть включена обратная связь 49.
Рассмотрим работу системы при ходе золотников 7, соответствующему дискретному сигналу управления.
При нормальной работе все три золотника 7 по сигналу управления, поступающему из устройств 1 и 2 и преобразованному в устройстве 6 (фиг.1) привода 3, занимают одно из крайних положений, например левое положение (фиг.5). Из схемы (фиг.5) где стрелками отмечены направления разветвлений рабочего потока, видно что он поступает в гидродвигатель 8 через окно 18, а из окна 17 - на слив всех трех золотников 7. В случае отказа (фиг.6) одного из золотников 7, например нижнего (по чертежу) , распределение потока изменя
ется, и через систему трех золотников 7 проходит нераэветвленный поток (отмечено стрелками). Из сопоставления схем фиг.5 и 6 видно, что по0
5
0
5
4
0
5
0
5
0
5
176
токи на входе и выходе гидродвигателя 8 остаются неизменными, так как потерь потока на слив в процессе работы гидродвигателя 8 не происходит. Разветвление потоков на параллельные ветви согласно схеме (фиг.5) приводит лишь к уменьшению гидравлического Сопротивления в процессе движения гидродвигателя 3, что ускоряет его разгон, т.е. снижает время достижения требуемой скорости.Если требуется обеспечить постоянство времени разгона для обоих случаев работы в линии 9 гидропитания, устанавливается регулируемый дроссель 36.
Вариант согласно схеме на фиг.7 принципиально не отличается по действию от схем на фиг.4-6 и служит для расширения возможностей выбора хода золотников 7 и величины рабочих окон 17-20 и 28-35.В схеме (фиг.7) ход золотников 7 может быть выбран равным (с точностью допуска на отклонения межкромочных расстояний) дпине рабочего окна, например 19 в направлении хода золотника 7. Это видно из рассмотрения схемы образования окон 17-20 и 28-35 и хода (фиг.8), где показано левое крайнее положение золотников 7.Кроме того,ход может быть выбран равным удвоенному отрицательному перекрытию (фиг.7),
На схеме (фиг.5) длина рабочего окна, например, 19 в направлении хода золотников 7 составляет лишь часть хода золотника 7, зато перекрытия кромок в крайних положениях существенно увеличены, что расширяет допуски и показатели плавности переключения для достижения требуемых выходных характеристик. При необходимости уменьшенных ходов золотников 7 целесообразно использовать схему согласно фиг.8, где ход равен открытию рабочего окна, например, 19, либо удвоенному отрицател--- ному перекрытию.
На фиг.10 представлена схема, где в каждом канале привода 3 имеются по два усилителя 4, что используется, например, для создания широтно- импульсного управления золотниками 7. Конкретным примером подобного устройства является схема на фиг.11, где используются гидроусилители 37 с преобразователями 38. Гидроусилители 37 типа сопло - заслонка при дискретном
сигнале управления обладают повьшен- ной надежностью. Оба распределительных устройства 5 поочередно подключаются к полостям многополостного гидродвигателя 8, к которому на выходе подключен редуктор 39. При управлении золотников 7 по независимьм гидролиниям 40-42 (фиг.12) отказ одного из устройств 6 или одного из ; золотников 7 не приводит к выходу из строя привода 3, так как отказ преобразователя 38 или устройства 6 зквивалентен в такой схеме отказу одного из золотников 7. При этом существенно упрощается система управления при сохранении выходных характеристик и уменьшении мощности управления за счет исключения большого числа параллельно включенных каналов.
Указанные варианты подключения злектромеханических преобразователей 38, а также каких-либо промежуточных устройств преобразования и усиления к устройству 5 можно осуществлять и механическим путем,например, при помощи дифференциальных устройств (фиг.14), зубчатых передач и т.д.
Технико-экономическая эффективность предлагаемой системы заключается в упрощении конструкции и улучшении габаритно-массовых характеристик при снижении мощности управления, потерь и повьш1ении надежности.
Формула изобретения
1. Электрогидравлическая система управления, содержащая электронные устройства сигнала управления, многоканальный электрогидравлический привод, включающий параллельно подключенные распределительные устройства, каждое из которых вьтолнено в виде установленного в корпусе золотника
5
0
5
0
5
0
5
с образованием торцовых управляющих камер, при этом в корпусе выполнены четыре окна на каждьй золотник, два из которых подключены к гидродвигателю, а два других - к линиям гидропитания и слива, а золотник выполнен с тремя разделительными поверхностями, отличающаяся тем, что, с целью упрощения конструкций и улучшения энергомассовых характеристик путем снижения числа параллельно включенных распределительных устройств и исключения шунтирования линии гидропитания линией слива при отказе, распределительное устройство выполнено в виде по меньшей мере трех золотников, каждый из которых снабжен четырьмя дополнительными разделительными поверхностями, попарно и симметрично расположенными относительно окон, подключенных к гидродвигателю, в корпусе выполнены дополнительные окна, попарно расположенные по обе стороны относительно каждой дополнительной поверхности, при этом каждое дополнительное окно предыдущего золотника связано с противоположным относительно соответствующей дополнительной поверхности окном последующего золотника.
2.Система по п.1, отличающая с я тем, что сооветствую- щие торцовые управляющие камеры каждого из золотников связаны между собой.
3.Система по п.1, отличающая с я тем, что торцовые управляющие камеры золотников подключены к независимым гидролиниям управления.
4.Система поп.1,отлича- ю щ а я с я тем, что каждая из разделительных поверхностей золотников вьтолнена в виде цилиндрического пояска, а корпус - из набора дисковых шайб.
r
ч i 7
LLl L J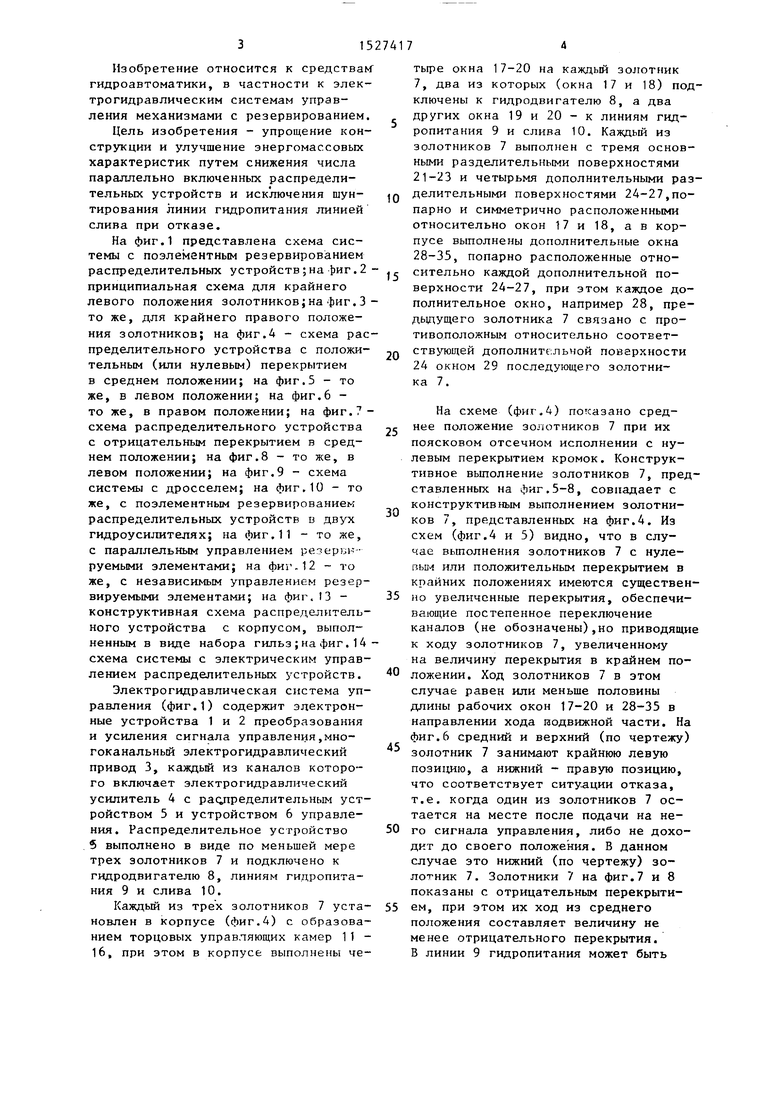
| название | год | авторы | номер документа |
|---|---|---|---|
| Электрогидравлический усилитель дляупРАВлЕНия МНОгОпОлОСТНыМ пОРшНЕВыМгидРОдВигАТЕлЕМ | 1979 |
|
SU821764A1 |
| Гидроусилитель | 1989 |
|
SU1679065A1 |
| Электрогидравлический привод с обратной связью по скорости | 1980 |
|
SU909359A1 |
| Гидроусилитель | 1989 |
|
SU1687922A1 |
| Электрогидравлический привод с обратной связью по скорости | 1980 |
|
SU903585A1 |
| Четырехлинейный гидрораспределитель с плоским поворотным золотником | 2002 |
|
RU2219353C2 |
| Электрогидравлический следящий привод | 1978 |
|
SU754124A1 |
| Блок комбинированных рулевых приводов системы управления летательного аппарата | 1981 |
|
SU1839883A1 |
| Гидравлический дроссельный привод | 1990 |
|
SU1742500A1 |
| СПОСОБ РЕГУЛИРОВАНИЯ СКОРОСТИ СЛЕДЯЩЕГО ЭЛЕКТРОГИДРАВЛИЧЕСКОГО ПРИВОДА (ВАРИАНТЫ) И СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2004 |
|
RU2271479C1 |
Изобретение может быть использовано в системах управления механизмами с резервированием. Цель изобретения - упрощение конструкции и улучшение энергомассовых характеристик путем снижения числа параллельно включенных распределительных устройств и исключения шунтирования линии гидропитания линией слива при отказе. Для этого распределительное устройство выполнено в виде по меньшей мере трех золотников 7, каждый из которых выполнен с основными и дополнительными разделительными поверхностями 21, 22, 23 и 24, 25, 26, 27, при этом последние попарно и симметрично расположены относительно окон 17, 18, а в корпусе 11 выполнены основные и дополнительные окна 17, 18, 19 и 28 - 35. Каждое дополнительное окно, например 28, предыдущего золотника 7 связано с противоположным относительно соответствующей дополнительной поверхности 24 окном 29 последующего золотника 7. Система обеспечивает повышенную надежность работы при снижении мощности управления как при работе в аналоговом, так и с дискретным входным сигналом. 3 з.п. ф-лы. 14 ил.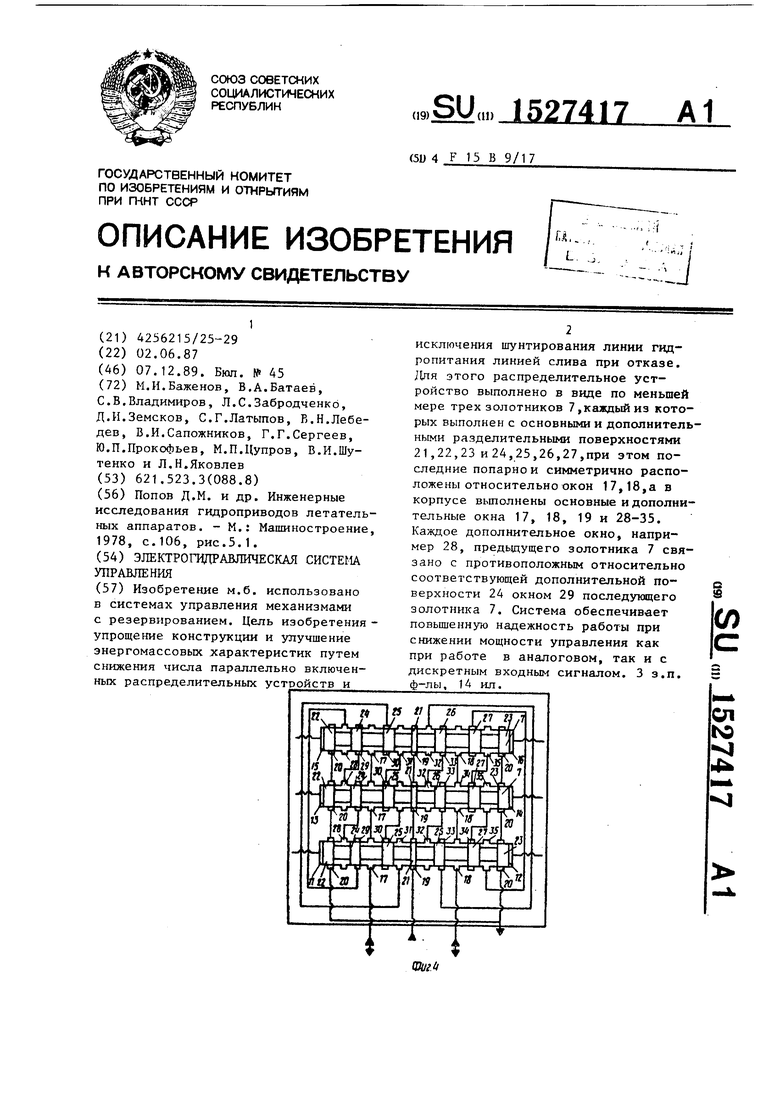
1 Т
V
Фиг.1
Фиг.З
Фиг. 6
щигЛ
фиг. 8
5 I
1 w ч.
J6
Ю
. Фиг.9
31
aOfOsфт. Ю
31 J
Л
3t
:Э
iA
Д4
tA
l 6
фиг.12
фиг. /
| Попов Д.М | |||
| и др | |||
| Инженерные исследования гидроприводов летательных аппаратов | |||
| - М.: Машиностроение, 1978, с.106, рис.5.1. |
