(54) ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ ПРИВОД С ОБРАТНОЙ СВЯЗЬЮ ПО СКОРОСТИ
| название | год | авторы | номер документа |
|---|---|---|---|
| Электрогидравлический привод с обратной связью по скорости | 1980 |
|
SU903585A1 |
| Гидравлический дроссельный привод | 1990 |
|
SU1742500A1 |
| Электрогидравлический привод | 1979 |
|
SU808713A1 |
| ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ СЛЕДЯЩИЙ ПРИВОД | 2006 |
|
RU2311567C1 |
| Электрогидравлическая система управления | 1987 |
|
SU1527417A1 |
| ГИДРОУСИЛИТЕЛЬ | 2006 |
|
RU2307960C1 |
| Электрогидравлический привод | 1979 |
|
SU827859A1 |
| ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ ПРИВОД ДРОССЕЛЬНОГО | 1972 |
|
SU335453A1 |
| Электрогидравлический привод | 1979 |
|
SU817327A1 |
| ОГРАНИЧИТЕЛЬ МОЩНОСТИ ЭЛЕКТРОГИДРАВЛИЧЕСКОГО СЛЕДЯЩЕГО ПРИВОДА | 2006 |
|
RU2309302C1 |
1
Изобретение относится к силовому приводу и может использоваться для управления массивными рабочими и управляющими органами машин и механизмов, испытывающими дополнительное воздействие внешней динамической нагрузки, в частности в приводе дорожных и строительных машин, транспортных средств, станков, судов, летательных аппаратов и подъемном оборудовании.
Известен электрогидравлический привод с обратной связью по скорости, содержаш,ий двухкаскадный гидроусилитель, второй каскад которого включает четырехкромочный золотник, установленный в гильзе, имеюш,ей два напорных и два сливных рабочих окна, .и гидродвигатель, кинематически связанный с устройством обратной связи по скорости 1.
Недостатком известного привода является то, что при работе на инерционную нагруэку привод неустойчив, так как резонанс динамической системы гидродвигатель-масса нагрузки является слабодемпфированным из-за малого скольжения гидродвигателя, а «оэффициент усиления контура стабилизации скорости выше критического из-за
большой крутизны расходной характеристики окна, имеющего малую длину.
Цель изобретения - повышение качества переходных процессов при работе на инерционную нагрузку.
5Поставленная цель достигается тем, что
в устройстве сливные и напорные рабочие окна выполнены с различным по знаку перекрытием относительно кромок золотника, причем ширина сливных и напорных
Q окон выполнена в соответствии со следующим соотношением
& 2где 6 - ширина сливных и напорных окон 15гильзы;
Х - длина сливных и напорных окон гильзы, измеренная вдоль оси золотника.
При этом сливные рабочие окна выпол2Q нены с положительным перекрытием, а напорные - с отрицательным перекрытием относительно кромок золотника.
Кроме того, с целью повышения ресурса гидродвигателя, сливные рабочие окна выполнены с отрицательным перекрытием, а
напорные - с положительным перекрытием относительно кромок золотника.
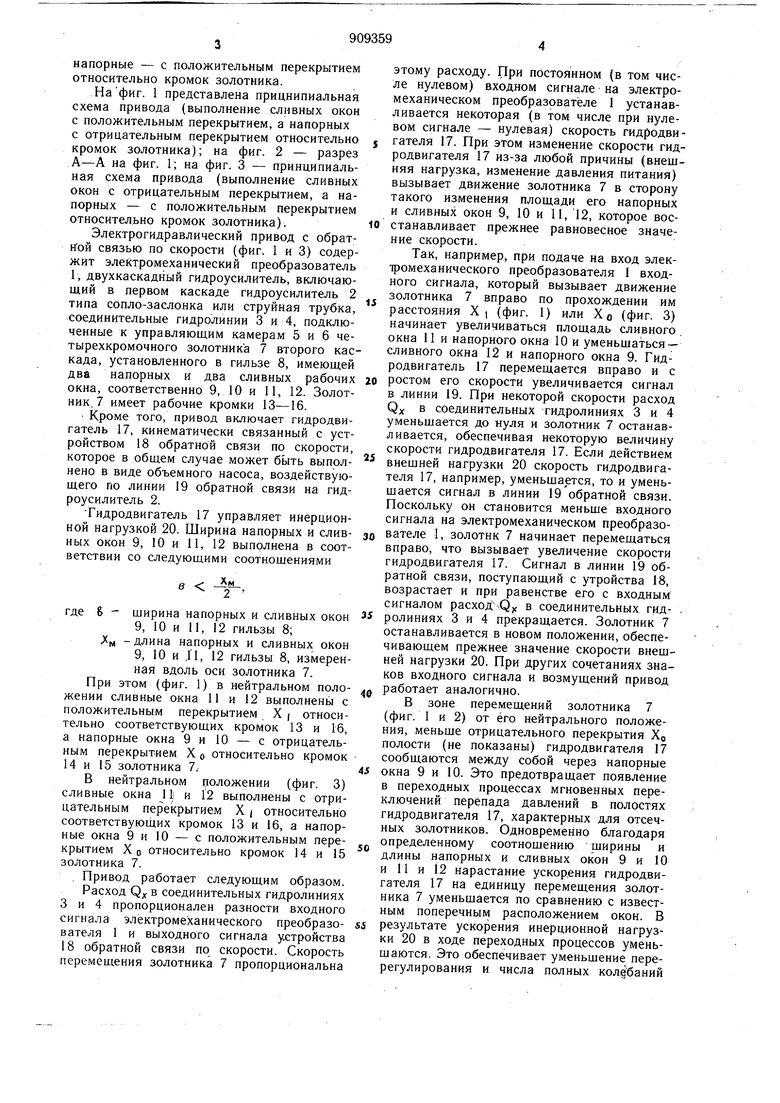
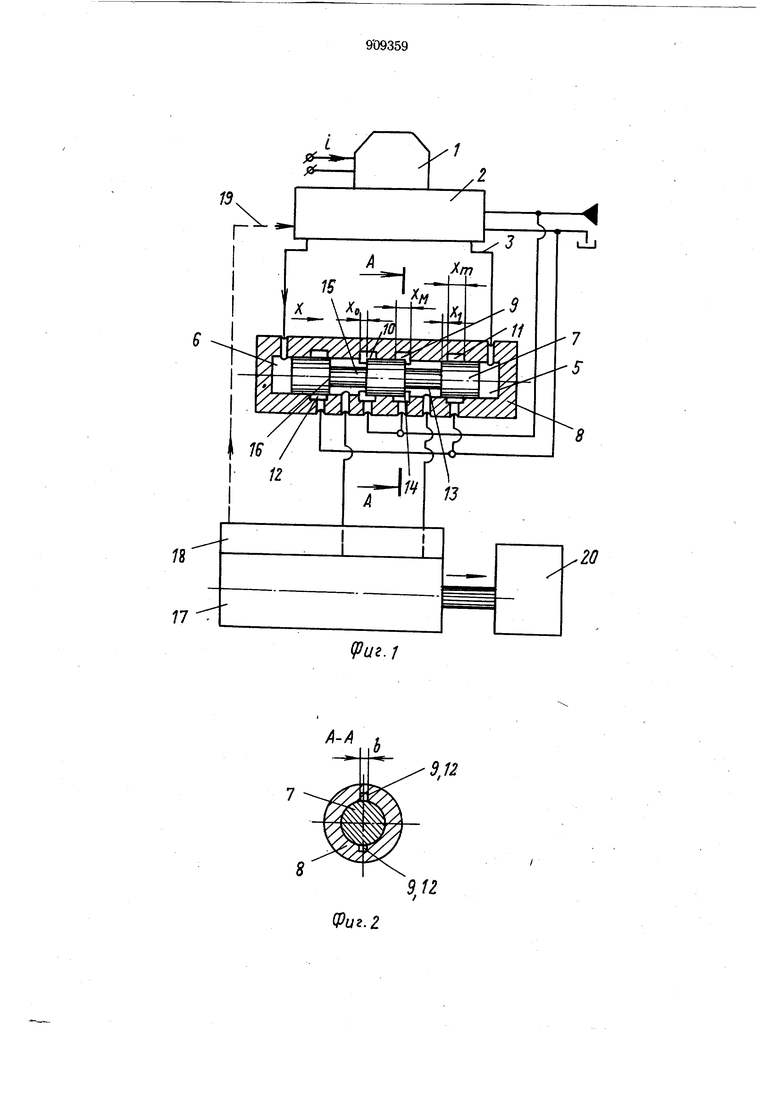
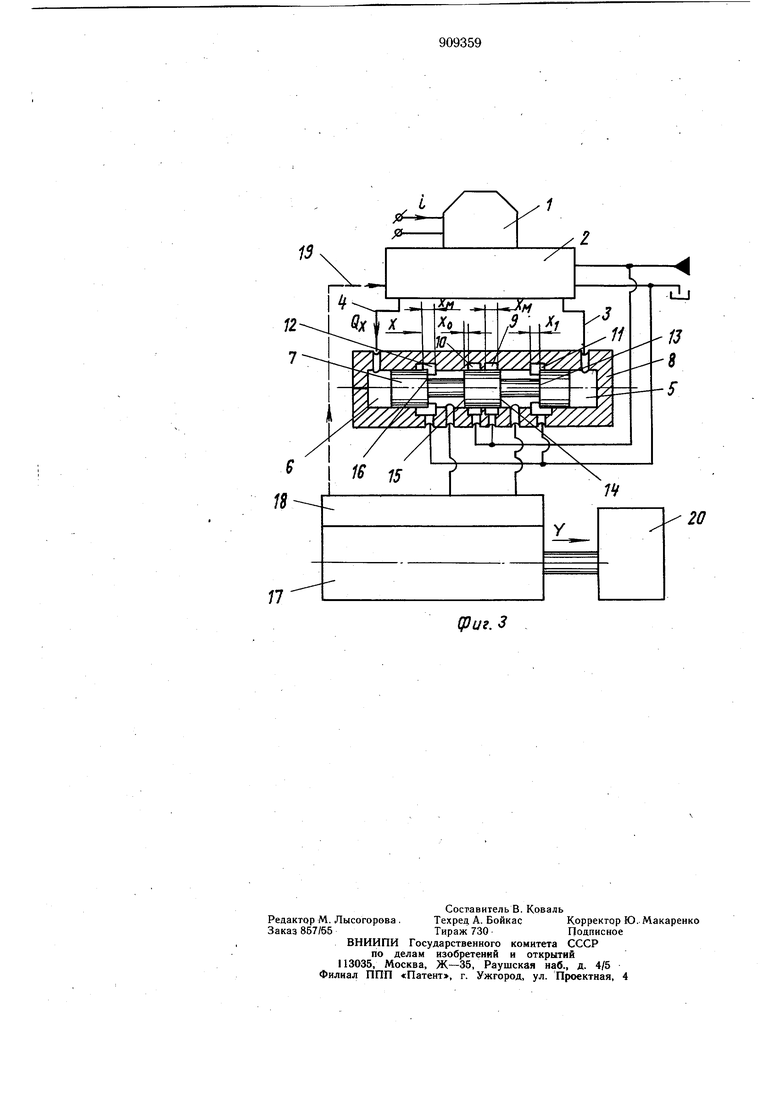
Нафиг. 1 представлена прицнипиальная схема привода (выполнение сливных окон с положительным перекрытием, а напорных с отрицательным перекрытием относительно кромок золотника); на фиг. 2 - разрез А-А на фиг. 1; на фиг. 3 - принципиальная схема привода (выполнение сливных окон с отрицательным перекрытием, а напорных - с положительным перекрытием относительно кромок золотника).
Электрогидравлический привод с обратной связью по скорости (фиг. 1 и 3) содержит электромеханический преобразователь 1, двухкаскадный гидроусилитель, включающий в первом каскаде гидроусилитель 2 типа сопло-заслонка или струйная трубка, соединительные гидролинии 3 и 4, подключенные к управляющим камерам 5 и 6 четырехкромочиого золотника 7 второго каскада, установленного в гильзе 8, имеющей два напорных и два сливных рабочих окна, соответственно 9, 10 и 11, 12. Золотник. 7 имеет рабочие кромки 13-16.
Кроме того, привод включает гидродвигатель 17, кинематически связанный с устройством 18 обратной связи по скорости, которое в общем случае может быть выполнено в виде объемного насоса, воздействующего по линии 19 обратной связи на гидроусилитель 2.
Гидродвигатель 17 управляет инерционной нагрузкой 20. Ширина напорных и сливных окон 9, 10 и 11, 12 выполнена в соответствии со следующими соотнощениями
в 2-.
где 6 - ширина напорных и сливных окон
9, 10 и 11, 12 гильзы 8; м -длина напорных и сливных окон 9, 10 и .Г1, 12 гильзы 8, измеренная вдоль оси золотника 7.
При этом (фиг. 1) в нейтральном положении сливные окна 11 и 12 выполнень с положительным перекрытием X ( относительно соответствующих кромок 13 и Гб, а напорные окна 9 и 10 - с отрицательным перекрытием X о относительно кромок 14 и 15 золотника 7.
В нейтральном положении (фиг. 3) сливные окна 11 и 12 выполнены с отрицательным перекрытием X | относительно соответствующих кромок 13 и 16, а напорные окна 9 и 10 - с положительным перекрытием X о относительно кромок 14 и 15 золотника 7.
Привод работает следующим образом.
Расход Qj( в соединительных гидролиниях 3 и 4 пропорционален разности входного сигнала электромеханического преобразователя 1 и выходного сигнала устройства 18 обратной связи по скорости. Скорость пере.мещения золотника 7 пропорциональна
этому расходу. При постоянном (в том числе нулевом) входном сигнале на электромеханическом преобразователе 1 устанавливается некоторая (в том числе при нулевом сигнале -нулевая) скорость гидродвигателя 17. При этом изменение скорости гидродвигателя 17 из-за любой причины (внещняя нагрузка, изменение давления питания) вызывает движение золотника 7 в сторону такого изменения площади его напорных и сливных окон 9, 10 и 11, 12, которое восстанавливает прежнее равновесное значение скорости.
Так, например, при подаче на вход электромеханического преобразователя 1 входного сигнала, который вызывает движение золотника 7 вправо по прохождении им расстояния Х| (фиг. 1) или Хо (фиг. 3) начинает увеличиваться площадь сливного окна 11 и напорного окна 10 и уменьщаться - сливного окна 12 и напорного окна 9. Гидродвигатель 17 перемещается вправо и с
0 ростом его скорости увеличивается сигнал в линии 19. При некоторой скорости расход QX в соединительных гидролиниях 3 и 4 уменьщается до нуля и золотник 7 останавливается, обеспечивая некоторую величину скорости гидродвигателя 17. Если действием
внещней нагрузки 20 скорость гидродвигателя 17, например, уменьщается, то и уменьщается сигнал в линии 19 обратной связи. Поскольку он становится меньще входного сигнала на электромеханическом преобразователе 1, золотнк 7 начинает перемещаться вправо, что вызывает увеличение скорости гидродвигателя 17. Сигнал в линии 19 обратной связи, поступающий с утройства 18, возрастает и при равенстве его с входным сигналом расход Qy в соединительных гид- .
5 ролиниях 3 и 4 прекращается. Золотник 7 останавливается в новом положении, обеспечивающем прежнее значение скорости внешней нагрузки 20. При других сочетаниях знаков входного сигнала и возмущений привод
д работает аналогично.
В зоне перемещений золотника 7 (фиг. 1 и 2) от его нейтрального положения, меньще отрицательного перекрытия XQ полости (не показаны) гидродвигателя 17 сообщаются между собой через напорные
5 окна 9 и 10. Это предотвращает появление в переходных процессах мгновенных переключений перепада давлений в полостях гидродвигателя 17, характерных для отсечных золотников. Одновременно благодаря определенному соотнощению щирины и длины напорных и сливных окон 9 и 10 и 11 и 12 нарастание ускорения гидродвигателя 17 на единицу перемещения золотника 7 уменьщается по сравнению с известным поперечным расположением окон. В
S результате ускорения инерционной нагрузки 20 в ходе переходных процессов уменьшаются. Это обеспечивает уменьшение перерегулирования и числа полных кол§баний в ходе реакции на скачок входного сигнала, т. е. улучшение качества переходного процесса. Указанный положительный эффект дополнительно улучшается благодаря тому, что в большинстве случаев давление- в полостях гидродвигателя 17 близко к давлению нагнетания, что обеспечивает увеличенную жесткость гидродвигателя 17, благодаря увеличению объемного модуля упругости рабочей жидкости, находящейся под высоким давлением. В результате быстродействие, т. е. время регулирования переходного процесса, повышается. В зоне перемещения, золотника 7 от его нейтрального положения, меньшего отрицательного перекрытия Xj полости гидродвигателя 17 сообш,аются меж ду собой через сливные окна 11 и 12. Это аналогично вышеописанному приводу уменьшает- резонанс инерционной нагрузки 20. Вместе с тем предлагаемое решение обеспечивает давление в полостях гидродвигателя 17, в большинстве случаев близкое к давлению слива. В результате напряжения в уплотнениях гидродвигателя 17 в среднем по времени уменьшаются, что сушественно повышает их ресурс. УТО касается опасности возникновения кавитации, то она уменьшается прежде всего благодаря обеспечению безударных переключений давления и дополнительно - за счет некоторого подпора по сливной магистрали, который каК правило предусматривается в современных гидросистемах Таким образом, в предложенном приводе обеспечено демпфирование резонанса инерционной нагрузки и повышение ресура тидродвигателя. Следует отметить, что предложенное решение не ухудшает экономичности энергопотребления привода, т. к. при нулевом сигнале непроизводительный расход через золотник 7 практически отсутствует. Формула изобретения 1 Электрогидравлический привод с обратной связью по скорости, содержащий двухкаскадный гидроусилитель, второй каскад которого включает четырехкромочный золотник, установленный в гильзе, имеющей два напорных и два сливных рабочих окна, и гидродвигатель, кинематически связанный с устройством обратной связи по скорости, отличающийся тем, что, с целью повышения качества переходных процессов при работе на инерционную нагрузку, сливные и напорные рабочие окна выполнены с различным по знаку перекрытием относительно кромок золотника, причем ширина сливных и напорных окон выполнена в соответствии со следующим соотношением. в -, где & -шир«на сливных и напорных окон гильзы; X|j,-длина сливных и напорных окон гильзы, измеренная вдоль оси золотника. 2.Привод по п. 1, отличающийся тем, что сливные рабочие окна выполнены с положительным перекрытием, а напорные - с отрицательным перекрытием относительно кромок золотника. 3.Привод по п. 1, отличающийся тем, что, с целью повышения ресурса гидродвигателя, сливные рабочие окна в.1полнены с отрицательным перекрытием, а напорные - с положительным перекрытием относительно кромок золотника. Источники информации, принятые во внимание при экспертизе 1. Чупраков Ю. И. Гидропривод и средства гидроавтоматики. М., «Машиностроение, 1979, с. 150, рис. 105.
/1
7
/б
dc
Л.,
п
./
(Риг.з
