(54) ЭЛЕКТРОГИДРАВЛИЧЁСКИЙ ПРИВОД С ОБРАТНОЙ СВЯЗЬЮ по СКОРОСТИ
1
Изобретение относится к исполнительным приводам систем управления и может использоваться для управления объектами, испытывающими воздействие внешних постоянных и переменных усилий нагрузки, например рабочими и управляющими органами дорожных и строительных машин, транспортных средств, судов, летательных аппаратов.
Известен электрогидравлический привод с обратной связью по скорости, содер жащий золотник с дросселирующими окнами в гильзе, управляющие камеры которого соединены с гидроусилителем типа «сопло-заслонка и с рабочими полостями объемного- насоса, кинематически связанного с гидродвигателями 1.
В известном приводе независимость скорости от нагрузки обеспечивает экономичность энергопотребления, но появляется новый специфический режим работы. Из-за малой жесткости или отсутствия торцовых пружин золотника скачок входного сигнала вызывает уход золотника на упор управляющей камеры. С момента касания упора перепад давления в управляю
щих камерах, в обычном режиме небольщой, мгновенно достигает максимальной величины. Этот перепад давлений через объемный насос воздействует на гидродвигатель и вызывает «бросок скорости
5 его выходного звена. Если объемный насос расположен параллельно гидродвигателю и связан с ним траверсой, усилия со стороны объемного насоса вызывают изгиб выходного звена гидродвигателя, сопровождающийся резким увеличением силы трения последней и возникновению усталостных трещин в месте крепления траверсы. В результате плавность работы привода ухудщается, а его ресурс уменьшается.
5 Цель изобретения - обеспечение плавности работы привода и повышение его ресурса.
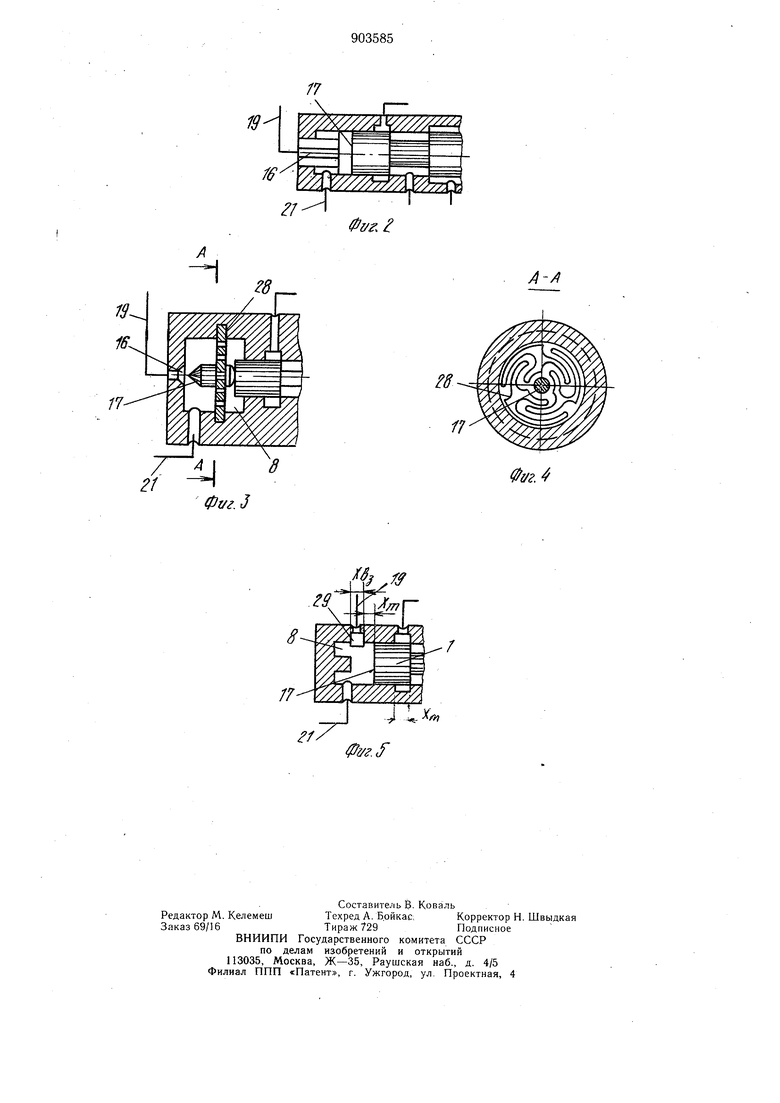
Поставленная цель достигается тем, что управляющие камеры работы привода клапанами, рабочие отверстия которых выполнены в гильзе и гидравлически соединены с соплами гидроусилителя, а подвижные элементы кинематически связаны с золотником, причем полный ход подвижных элементов от нейтрали золотника выбирается из соотношения Хп XM + XBS, где Хр-полный ход подвижных элементов клапанов; XM-максимальная длина дросселирующего окна гильзы, измеренная вдоль оси золотника; Хвз - ход подвижного элемента в зоне его взаимодействия с рабочими отверстиями. Кроме того, подвижными элементами клапана являются торцы золотника, а рабочие отверстия клапанов вьшолнены в виде дросселирующих окон, имеющих относительно торцовых кромок золотника отрицательные перекрытия, равные длине рабочего хода золотника. На фиг. I представлена принципиальная схема предлагаемого привода; на фиг. 2 - принципиальная схема клапана, подвижным элементом которого являются торцы золотника; на фиг. 3 - клапан, с упругим подвесом подвижного элемента; на фиг. 4 - разрез А-А на фиг. 3; на фиг. 5 - выполнение отверстия клапана в виде дросселирующего окна. Электрогидравлический привод (см. фиг. 1) содержит золотник 1, установленный в гильзе 2, в которой выполнены дросселирующие окна 3-6 с образованием управляющих камер 7, и 8, гидроусилитель типа «сопло-заслонка, включающий электромеханический преобразователь 9, сопла 10 и 11, заслонку 12, постоянные дросселя 13 и 14, связанные с устройством 15 питания. Управляющие камеры 7 и 8 снаб жены клапанами, включающими рабочие отверстия 16 и подвижные элементы 17 и 18, кинематически связанные с золотником 1. Управляющие камеры 7 и 8 гидролиниями 19 и 20 сообщены с соплами 10 и 11, а гидролиниями 21 и 22 - с рабочими полостями 23 и 24 объемного насоса 25, который траверсой 26 связан с гид родвигателем 27. На фиг. 3 и 4 подвижный элемент 17 установлен на упругом подвесе 28. На фиг. 5 рабочие отверстия выполнены в виде дросселирующего окна 29. Привод работает следующим образом. При отсутствии входного сигнала на электромеханическом преобразователе 9 заслонка12 занимает нейтральное положение относительно сопел 10 и 11, и проводимость последних равна. Если золотник 1 первоначально оказывается смещенным от своего нейтрального положения (например вправо по чертежу фиг. 1), его дросселирующие окна откроются и гидродвигатель 27 начинает движение вправо. При этом расход, создаваемый объемным насосом 25, через гидролинию 22 поступает в управляющую камеру 7 и вызывает движение золотника 1 влево. Когда золотник 1 достигает найтрального положения, гидродвигатель 27 останавливается. При подаче входного управляющего сигнала в электромеханический преобразователь 9, заслонка 12 смещается на, некоторую величину (например влево по чертежу фиг. 1), расход через сопло 10 становится меньще расхода через сопло 11 и в управляющих камерах 7 и 8 образуется перепад давления, стремящийся переместить золотник 1 вправо, сообщая гидродвигатель 27 с питанием и сливом. Гидродвигатель 27 набирает скорость. При этом растет расход через объемный насос 25, стремящийся переместить золотник 1 влево. При равенстве разности расхода объемного насоса 25 и разности расходов через сопла 10 и 11 золотник 1 останавливается. Далее при неизменном сигнале в электромеханическом преобразователе 9 и действии нагрузок на гидродвигатель 27 увеличение или уменьшение его скорости приводят к изменению расхода объемного насоса 25, которые перемещают золотник 1 в направлении такого изменения площади его дросселирующих окон 3-6, которое восстановит равновесное значение скорости. В ходе переходных процессов возможно отклонение золотника 1 от его нейтрального положения на расстояние, превышающее длину XM дросселирующих окон 3-6. При этом подвижные элементы 17 и 18 входят во взаимодействие с соответствующими рабочими отверстиями 15 и 16, перекрывая слив через сопла 10 и 11, что вызывает движение золотника 1 в обратном направлении и его остановку при полностью открытых дросселирующих окнах 3-6. В рабочей зоне, т. е. при смещении золотника 1 меньше максимальной длины дросселирующих окон 3-6 измеренной вдоль оси золотника 1, привод работает как описано выше. Отличие работы золотника 1, показанного на фиг. 3 и 4, состоит в том, что упругий подвес 28 малой жесткости при малых сигналах управления обеспечивает пропорционально регулирование положения золотника 1, что практически не влияет на стабилизацию скорости при больших сигналах управления. Выполнение рабочих отверстии клапана в виде дросселирующего окна 29 (фиг. 5) предотвращает возможные автоколебания золотника 1, кроме этого, такое техническое решение в ряде случаев может оказаться более технологичным. Таким образом, прекращение слива рабочей жидкости через сопла 10 и 11 в крайиих положениях золотника 1 предотвращает появление в управляющих камерах 7 и 8 перепада давления, которое, воздействуя через объемный насос 25 на гидродвигатель 27, вызывает неравномерность
хода и тем самым уменьшает ресурс привода.
Положительный эффект заключается в повышении надежности и расширении области применения привода, особенно в условиях переменных нагрузок и колебаний давления питания.
Формула изобретения
1. Электрогидравлический привод с обратной связью по скорости, содержаший золотник с дросселируюшими окнами в гильзе, управляюш,ие камеры которого соединены с гидроусилителем типа «соплозаслонка и с рабочими полостями объемного насоса, кинематически связанного с гидродвигателем, отличающийся тем, что, с целью обеспечения плавности работы привода и повышения его ресурса, управляющие камеры снабжены клапанами, рабочие отверстия которых выполнены в гильзе и гидравлически соединены с соплами гидроусилителя, а подвижные элементы кинематически связаны с золотником, при11ем полf J
f9.
ный ход подвижных элементов от нейтрали золотника выбирается из следующего соотношения
п + где Х - полный ход подвижных элементов
клапанов;
Xf(-максимальная длина дросселирующего окна гильзы, измеренная
вдоль оси золотника; ХЕЭ -ход подвижного элемента в зоне его взаимодействия с рабочим отверстием.
2.Привод по п. 1, отличающийся: тем, что подвижными элементами клапана являются торць золотника.
3.Привод но пп. 1 и 2, отличающийся тем, что рабочие отверстия клапанов выполнены в виде дросселирующих окон, имеющих относительно торцовых кромок золотника отрицательные перекрытия, равные длине рабочего хода золотника.
Источннки информации, принятые во внимание при экспертизе 1. Чупраков Ю. И. Гидропривод и средства гидроавтоматики. М., «Машиностроение, 1979, с. 150, рис. 105.
4
фг/г. /
A-/I
Фг/г.

| название | год | авторы | номер документа |
|---|---|---|---|
| ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ СЛЕДЯЩИЙ ПРИВОД | 2006 |
|
RU2311567C1 |
| Электрогидравлический привод с обратной связью по скорости | 1980 |
|
SU909359A1 |
| ГИДРОУСИЛИТЕЛЬ | 2006 |
|
RU2307960C1 |
| ОГРАНИЧИТЕЛЬ МОЩНОСТИ ЭЛЕКТРОГИДРАВЛИЧЕСКОГО СЛЕДЯЩЕГО ПРИВОДА | 2006 |
|
RU2309302C1 |
| Электрогидравлический привод | 1979 |
|
SU808713A1 |
| Гидроусилитель | 1981 |
|
SU994814A1 |
| ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ ПРИВОД ДРОССЕЛЬНОГО | 1972 |
|
SU335453A1 |
| ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ СЛЕДЯЩИЙ ПРИВОД | 2004 |
|
RU2268400C1 |
| ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ УСИЛИТЕЛЬ МОЩНОСТИ СО СТРУЙНЫМ УСИЛИТЕЛЕМ В ПЕРВОМ КАСКАДЕ | 2015 |
|
RU2594094C1 |
| Электрогидравлический привод с обратной связью по скорости | 1980 |
|
SU909360A1 |