Г
(fkft2
Изобретение относится к усталостным испытаниям, к установкам для испытаний при круговом изгибе с осевым растяжением.
Цель изобретения - расширение функциональных возможностей путем обеспечения программного изменения изгибной и осевой нагрузок в процессе испытаний.
На фиг. 1 приведена схема нагру- жения образца изгибающим моментом, и осевой растягивающей нагрузкой , на фиг. 2 - схема предлагаемой установки} на фиг. 3 - конструкция узла на- гружения осевой силой Р, на фиг.4 - конструкция узла нагружения поперечной силой Q; на фиг. 5 - схема изменения напряжений в рабочем сечении образца в течение одного цикла нагружения.
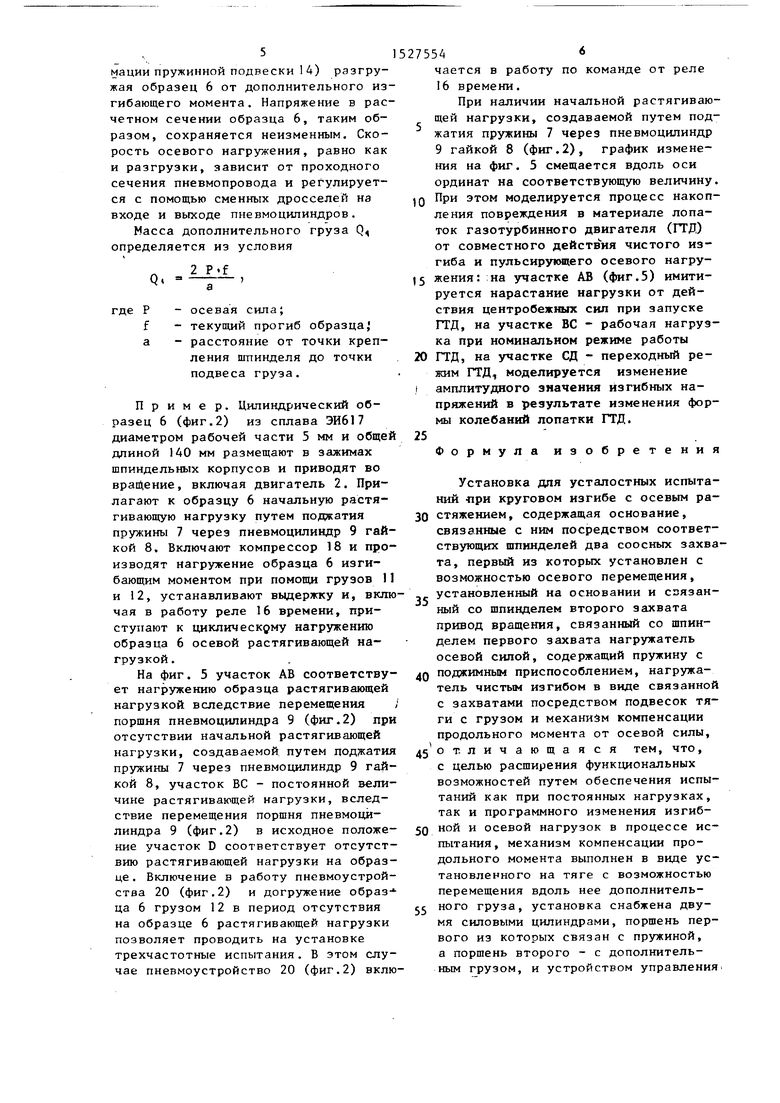
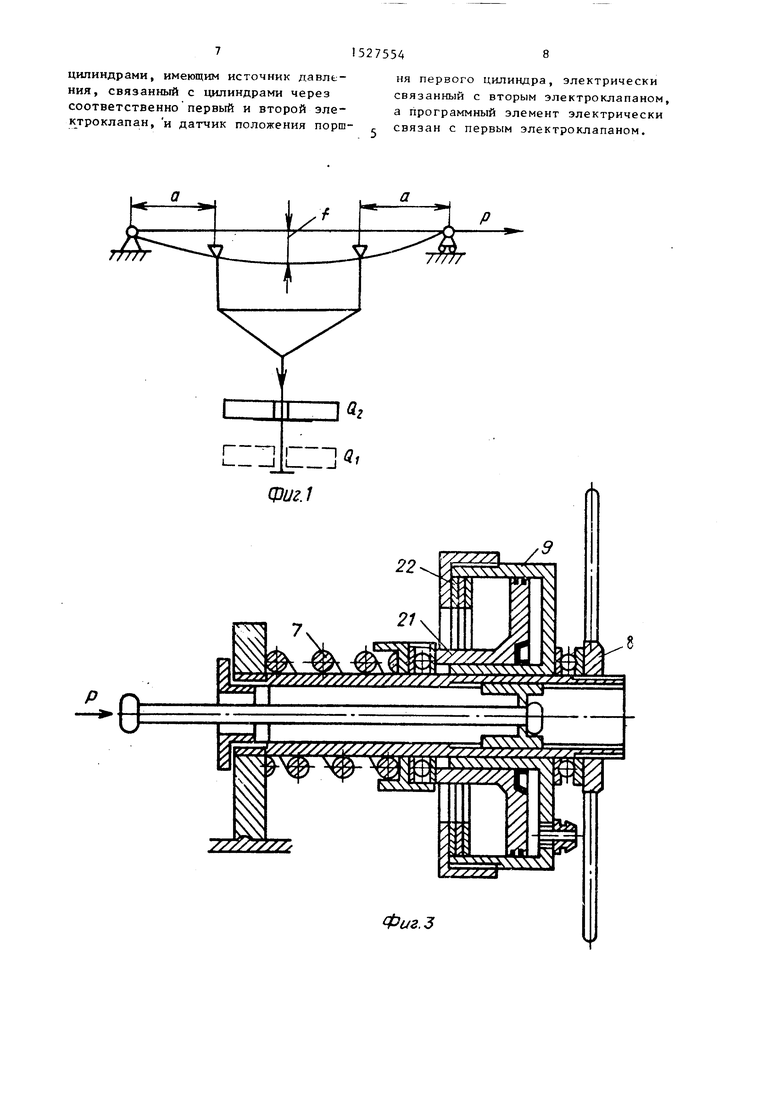
Установка (фиг.2) содержит основание 1, на котором размещен привод двигателя 2, вал которого соединен с шпинделем 3, корпус 4 которого шарнир но связан с основанием 1, корпус другого шпинделя 5 установлен с возможностью осевого перемещения.. Нагру жатель осевым усилием растяжения образца 6 выполнен в виде пружины 7, гайки 8 и первого пневмоцилиндра 9 для сжатия пружины 7, обоймы 10, шар нирно соединенной с корпусом шпинделя 5. Изгибающий момент в образце 6 создается при помощи груза 11 и дополнительного груза 12, установленных на тяге 13 с помощоЮ пружинной подвески 14 и коромысел 15 на корпусах щпинделей.
Таким образом,первый захват,связан ный со шпинделем 5,связан с нагружате- лем осевьш усилием, а второй захват с приводом вращения.
Установка содержит программный элемент - электронное реле 16 (ти- па ВЛ-25), связанны с электропневм клапаном 17, при открытии которого воздух от источника давления компрессора 18 поступает в пневмоцилиндр 9, сжимая заранее оттарированную пр жину 7 и производя в начальной точке перемещения включение микровыключателя - датчика положения поршня пневмоцилиндра 9 (первого пневмоцилиндра), Кикровыключатель (не показан) электрически связан с эле- ктропневмоклапаном 19. Последний перекрывает поступление сжатого воздуха из компрессора 18 в пневмоуст
5 0
5 Q
.„
j
5
5
ройство 20. В первом пневмоцилиндре 9 поршень 21 связан посредством тяги с первым захватом. Величина нагрузки Р определяется выбором жесткости пружины 7, а также количеством и толщиной прокладок 22.
Дополнительный груз 12 взаимодействует с тягой 13 посредством ограничителя 23 и связанной с грузом 12 тарелки 24. Второй пневмоцилиндр 25, входящий в состав пневмоустройства 20, связан своим поршнем 26 посредством стакана 27 с грузом 12.
Вместо пневмоцилиндров 9 и 25 могут быть использованы и иные силовые цилиндры, например гидрощшиндры. В этом случае вместо электропневмокла- панов используют э:тектроклапаны иной конструкции, а источник обеспечивает гидравлическое давление.
Установка работает след тощим образом .
Образец устанавливают в захватах, приводят во вращение, нагружая при этом грузом, создающим в образце чистый круговой изгиб. В заданный момент программный элемент открывает электропневмоклапан 17 и пневмоцилиндр 9 начинает сжимать пружину 7, создавая в образце осевое усилие. При этом датчик положения поршня пневмоцилиндра 9 подает сигнал на клапан 19, который перекрывает воздух и позволяет порщню 26 опуститься, обеспечивая тем самым возможность догружения Основного груза 1 1 дополнительным грузом 12 для компенсации восстанавливающего момента от осевой нагрузки и сохранения неизменным в процессе испытания напряжения в образце 6. По истечении заданного времени нагружения реле 16 времени, управляющее работой эле- ктропневмоклапана 17, дает сигнал на его закрытие. Подача воздуха из компрессора 18 в пневмоцилиндр 9 прекращается. Под действием сжатой пружины 7 поршень пневмоцилиндра перемешается в исходное положение, происходит снятие осевой растягивающей нагрузки.
В начале разгрузки сигнал от микровыключателя поступает на электропневмоклапан 19, воздух из компрессора 18 начинает поступать в пневмоустройство 20. Порщень 26, перемещаясь вверх, поднимает груз 12, постепенно (за счет упругой дефор5
мации пружинной подвески 14) разгружая образец 6 от дополнительного изгибающего момента. Напряжение в расчетном сечении образца 6, таким образом, сохраняется неизменным. Скорость осевого нагружения, равно как и разгрузки, зависит от проходного сечения пневмопровода и регулируется с помощью сменных дросселей на входе и выходе пневмоцилиндров.
Масса дополнительного груза Q, определяется из условия
2 P.f
Р f а
а
-осевая сила;
-текущий прогиб образца
-расстояние от точки крепления шпинделя до точки подвеса груза.
Пример. Цилиндрический образец 6 (фиг.2) из сплава ЭИ617 диаметром рабочей части 5 мм и общей длиной 1АО мм размещают в зажимах шпиндельных корпусов и приводят во врап(ение, включая двигатель 2. Прилагают к образцу 6 начальную растягивающую нагрузку путем поджатия пружины 7 через пневмоцилиндр 9 гайкой 8. Включают компрессор 18 и производят нагружение образца 6 изгибающим моментом при помощи грузов 11 и 12, устанавливают выдержку и, включая в работу реле 16 времени, приступают к циклическому нагружению образца 6 осевой растягивающей нагрузкой.
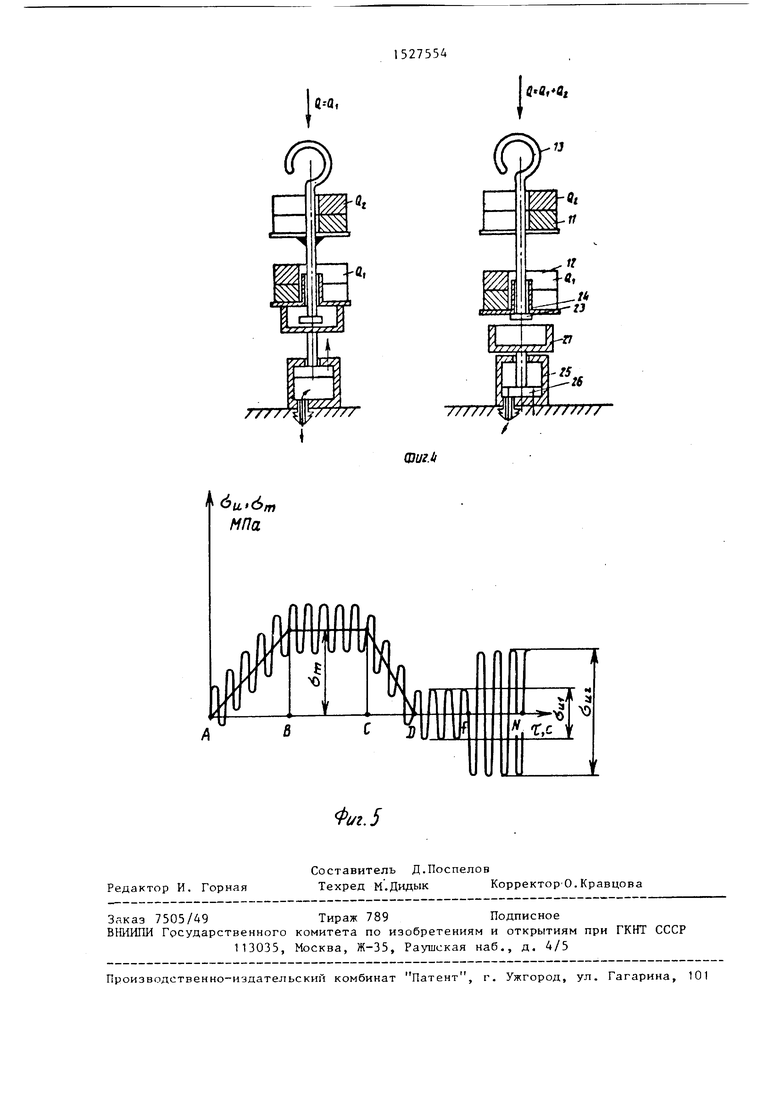
На фиг. 5 участок АВ соответствует нагружению образца растягивающей нагрузкой вследствие перемещения порщня пневмоцилиндра 9 (фиг.2) при отсутствии начальной растягивающей нагрузки, создаваемой путем поджатия пружины 7 через пневмоцилиндр 9 гайкой 8, участок ВС - постоянной величине растягивающей нагрузки, вследствие перемещения поршня пневмоцилиндра 9 (фиг.2) в исходное положение участок D соответствует отсутствию растягивающей нагрузки на образце. Включение в работу пневмоустрой- ства 20 (фиг.2) и догружение oбpaз- ца 6 грузом 12 в период отсутствия на образце 6 растягивающей нагрузки позволяет проводить на установке трехчастотные испытания. В этом случае пневмоустройство 20 (фиг.2) вклю27554
чается в работу по команде от реле 16 времени.
При наличии начальной растягивающей нагрузки, создаваемой путем поджатия пружины 7 через пневмоципиндр 9 гайкой 8 (фиг.2), график изменения на фиг. 5 смещается вдоль оси ординат на соответствующую величину.
JQ При этом моделируется процесс накопления повреждения в материале лопаток газотурбинного двигателя (ГТД) от совместного действ ия чистого изгиба и пульсирующего осевого нагру(5 жения: иа участке АВ (фиг.5) имитируется нарастание нагрузки от действия центробежных сип при запуске ГТД, на участке ВС - рабочая нагрузка при номинальном режиме работы
20 ГТД, иа участке СД - переходный режим ГТД, моделируется изменение
) амплитудного значения изгибных напряжений в результате изменения формы колебаний лопатки ГТД.
25
Формула изобретения
Установка для усталостных испытаний -при круговом изгибе с осевым ра30 стяжеиием, содержащая осиоваиие,
связанные с ним посредством соответствующих шпинделей два соосных захвата, первый из которых установлен с возможностью осевого перемещения, установленный на основании и связанный со шпинделем второго захвата привод вращения, связанный со шпинделем первого захвата нагружатель осевой силой, содержащий пружину с
дд поджимным приспособлением, нагружатель чистым изгибом в виде связанной с захватами посредством подвесок тяги с грузом и механизм компенсации продольного момента от осевой силы,
дз от. личающаяся тем, что, с целью расширения функциональных возможностей путем обеспечения испытаний как при постоянных нагрузках, так и программного изменения изгиб50 ной и осевой нагрузок в процессе испытания, механизм компенсации продольного момента выполнен в виде установленного на тяге с возможностью перемещения вдоль нее дополнительJ5 ного груза, установка снабжена двумя силовыми цилиндрами, поршень первого из которых связан с пружиной, а поршень второго - с дополнительным грузом, и устройством управления
35
цилиндрами, имеющим источник давле- ня первого цилиндра, электрически ния, связанный с цилиндрами через связанный с вторым электроклапаном, соответственно первый и второй эле- а программный элемент электрически
ктроклапан, и датчик положения порш- связан с первым электроклапаном.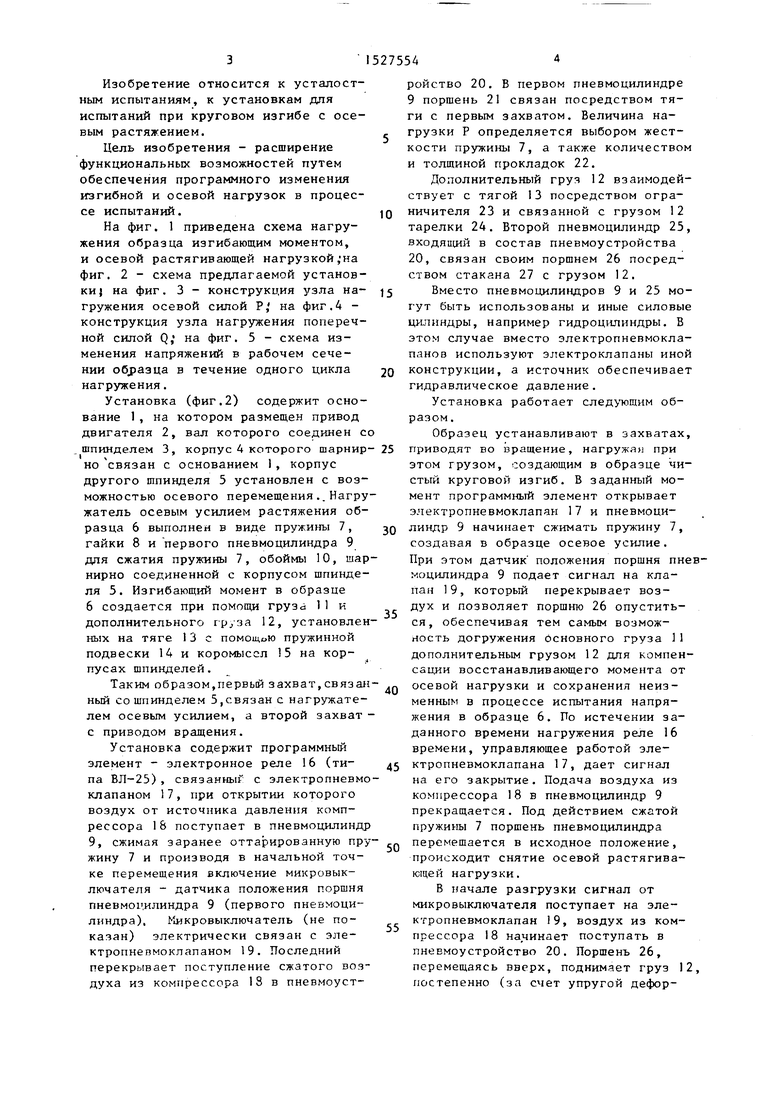
Изобретение относится к усталостным испытаниям, а именно к установкам для испытаний при круговом изгибе с осевым растяжением. Цель изобретения - расширение функциональных возможностей путем обеспечения программного изменения изгибной и осевой нагрузок в процессе испытаний. Образец 6 помещают в соосных захватах и приводят во вращение, нагружая чистым изгибом и осевой силой. Осевую силу задают путем программного изменения давления в пневмоцилиндре 9, для чего реле 16 по заданной программе открывает электропневмоклапан 17, соединяющий пневмоцилиндр 9 с источником давления. Сигнал от датчика положения поршня пневмоцилиндра 9 подается на электропневмоклапан 19, который отсекает источник давления от пневмоцилиндра. Поршень последнего опускается и дополнительный груз 12 догружает образец 6, компенсируя продольный момент осевой силы. 5 ил.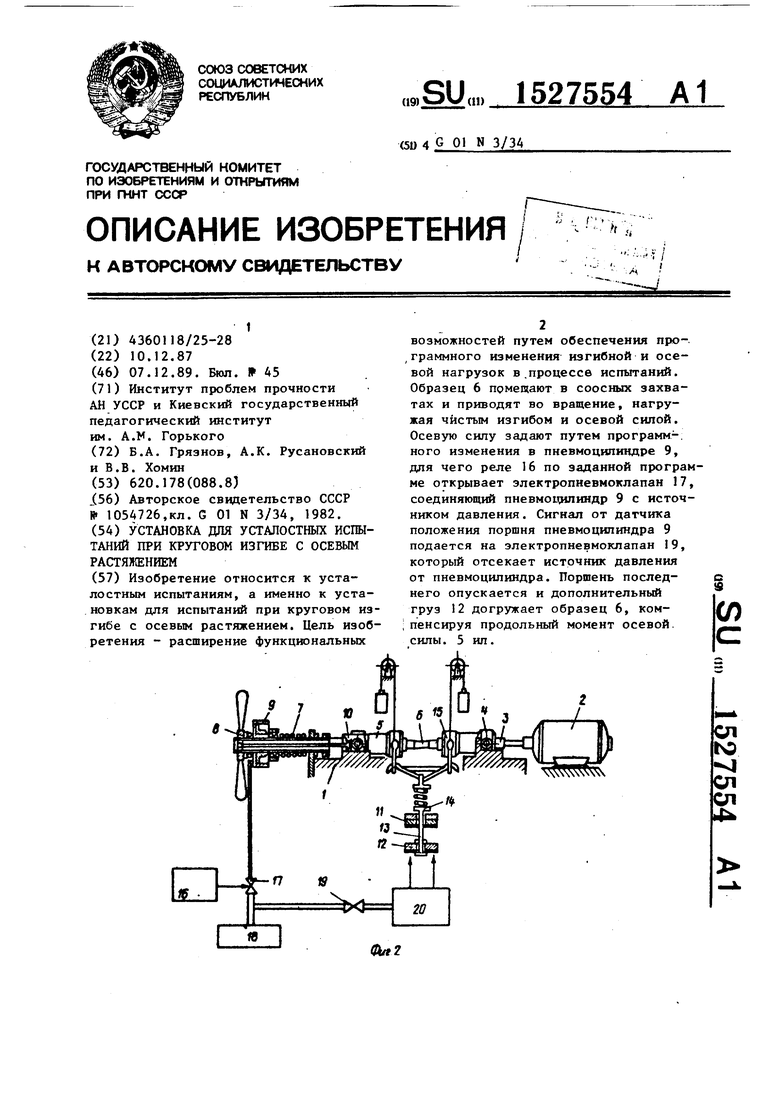
СШ
IП
.
Фиг.1
Фиг.З
й--а,
ф
т
т
F22I
EZ
VZZZA
/////
МПа
| Установка для испытаний материалов на усталость при чистом изгибе и статическом осевом нагружении | 1982 |
|
SU1054726A2 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
