1
(2О 4316660/24-24
(22) 03.07.87
(46) 15.12.89. Бюл. № 46
(72) IА.В.Архангельский,, Ю.И.Мищенко,
Р.И.Прокофьева и С.В.Топильский
(53)62-50 (088.8)
(56)Авторское свидетельство СССР 439788, кл. G 05 В 13/02, 1974.
(54)СА -ЮНАСТРАИВЛЮПАЯСЯ ПО ВХОДНОМУ СИГНАЛУ СИСТЕМА УПРАВЛЕНИЯ
(57)Изобретение относится к самонастраивающимся по входному сигналу системам автоматического управления и может быть использовано, когда вид и параметры входного воздействия изменяются в широком диапазоне. Цель изобретения - повышение точности системы в условиях неопределенности по структуре полезного входного воздействия. Самонастраивающаяся по входному сигналу система управления содержит последовательно соединенные сумматор J, регулятор 2, объект управления 3, выход которого соединен с вторым входом сумматора 1, выход которого через последовательно соединенные полосовой фильтр 4, квадратор 5, блок умножения 6, усилитель 7, блок извлечения квадратного корня 8, блок умножения 9, сумматор 10, регулятор 11, модель объекта управления 12, квадратор 16 и усилитель 14 соединен с первым входом сумматора 15. Новым является введение полосового фильтра 4, квадратора 16, функционального преобразователя 18, блока умножения 9, усилителя 14, блока извлечения квадратного корня 8, генератора белого шума 19, сумматора 15, регулятора 11, модели объекта управления 12, а также обусловленньк данными элементами новых связей. 4 ип.
(/;
с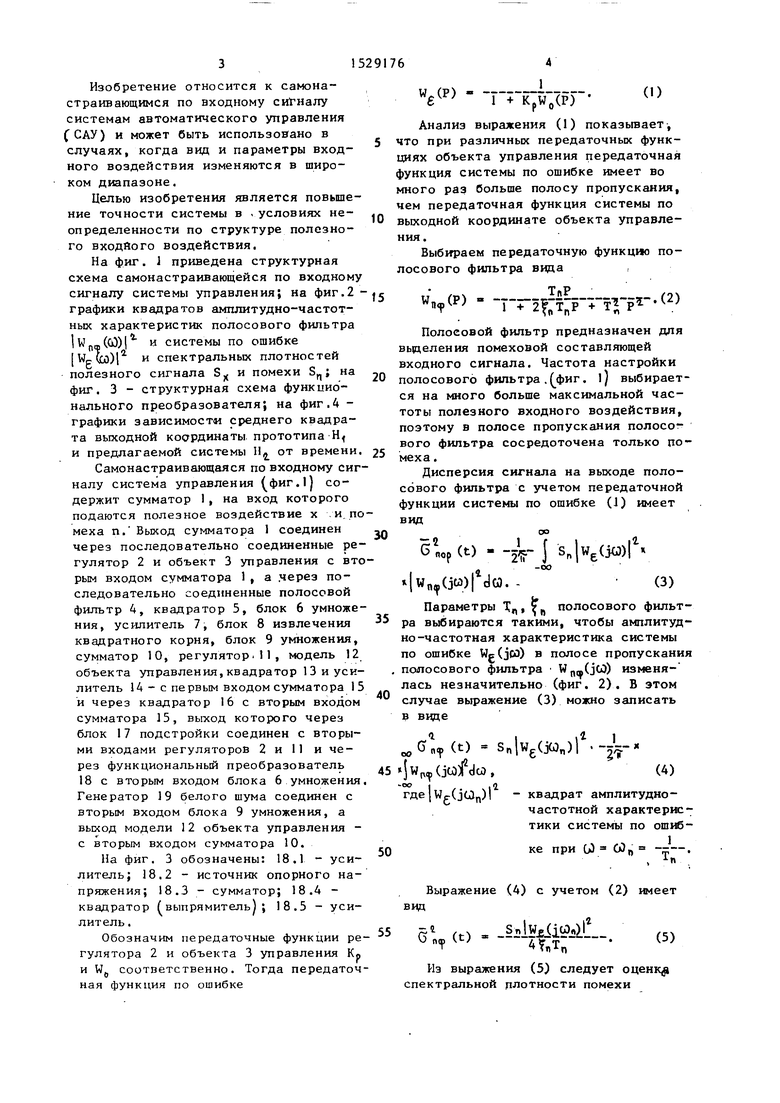
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для определения параметров объекта | 1987 |
|
SU1446602A1 |
| Вычислительное устройство дляизМЕРЕНия ХАРАКТЕРиСТиК фОТОгРАфи-чЕСКиХ СиСТЕМ | 1978 |
|
SU805326A1 |
| САМОНАСТРАИВАЮЩИЙСЯ ЭЛЕКТРОПРИВОД | 2013 |
|
RU2522858C1 |
| САМОНАСТРАИВАЮЩИЙСЯ ЭЛЕКТРОПРИВОД | 2013 |
|
RU2522857C1 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ УГЛОВ АТАКИ (СКОЛЬЖЕНИЯ) ЛЕТАТЕЛЬНОГО АППАРАТА | 1990 |
|
SU1800788A1 |
| САМОНАСТРАИВАЮЩИЙСЯ ЭЛЕКТРОПРИВОД | 2013 |
|
RU2542904C2 |
| САМОНАСТРАИВАЮЩИЙСЯ ЭЛЕКТРОПРИВОД | 2010 |
|
RU2460110C1 |
| САМОНАСТРАИВАЮЩЕЕСЯ УСТРОЙСТВО С ЭТАЛОННОЙ МОДЕЛЬЮ | 1972 |
|
SU328433A1 |
| САМОНАСТРАИВАЮЩИЙСЯ ЭЛЕКТРОПРИВОД | 2009 |
|
RU2399080C1 |
| АДАПТИВНАЯ СИСТЕМА УПРАВЛЕНИЯ | 2007 |
|
RU2368934C2 |
Изобретение относится к самонастраивающимся по входному сигналу системам автоматического управления и может быть использовано, когда вид и параметры входного воздействия изменяются в широком диапазоне. Цель изобретения - повышение точности системы в условиях неопределенности по структуре полезного входного воздействия. Самонастраивающаяся по входному сигналу система управления содержит последовательно соединенные сумматор 1, регулятор 2, объект управления 3, выход которого соединен со вторым входом сумматора 1, выход которого через последовательно соединенные полосовой фильтр 4, квадратор 5, блок умножения 6, усилитель 7, блок извлечения квадратного корня 8, блок умножения 9, сумматор 10, регулятор 11, модель объекта управления 12, квадратор 16, усилитель 14 соединен с первым входом сумматора 15. Новым является введение полосового фильтра 4, квадратора 16, функционального преобразователя 18, блока умножения 9, усилителя 14, блока извлечения квадратного корня 8, генератора белого шума 19, сумматора 15, регулятора 11, модели объекта управления 12, а также обусловленных данными элементами новых связей. 4 ил.
00
sj
О5
/«/
Изобретение относится к самонастраивающимся по входному CHfHany системам автоматического управления (САУ) и может быть использовано в случаях, когда вид и параметры входного воздействия изменяются в широком диапазоне.
Целью изобретения является повьше- ние точности системы в . условиях неопределенности по структуре полезного входйого воздействия.
На фиг. J приведена структурная схема самонастраивающейся по входному сигналу системы управления; на фиг.2 графики квадратов амплитудно-частотных характеристик полосового фильтра 1 W ..ф (СО)I и системы по ощибке
I ПФ ,
:wpfco)r
и спектральных плотностей
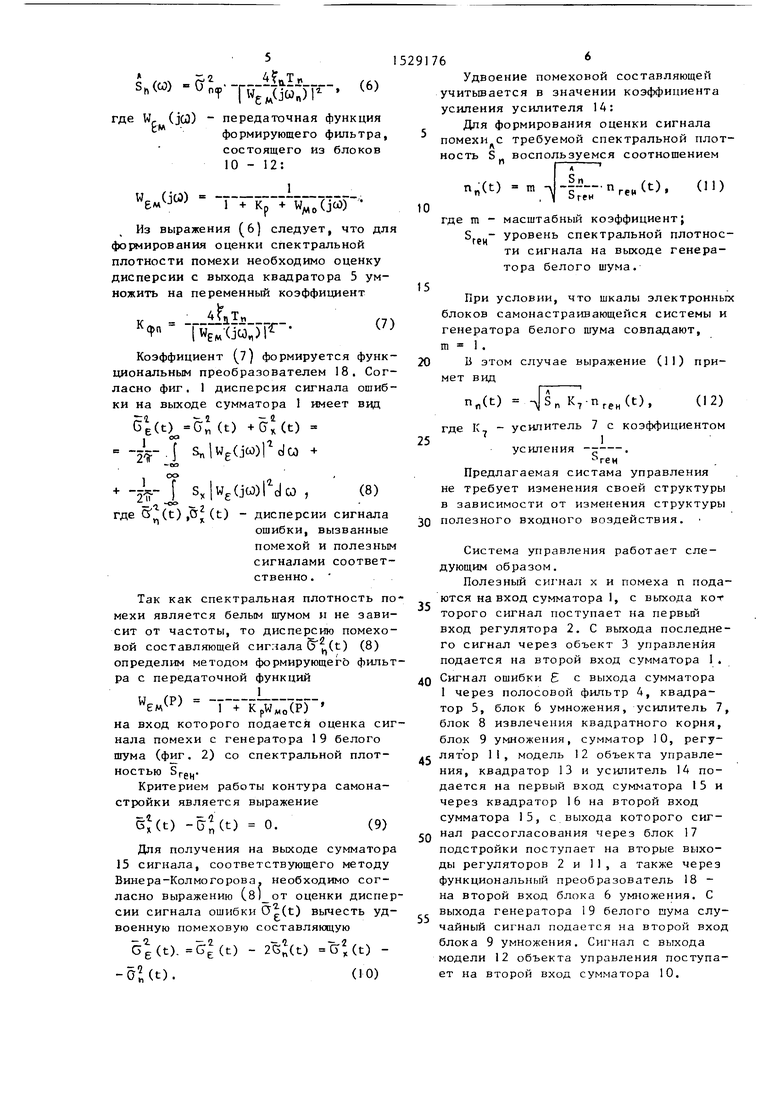
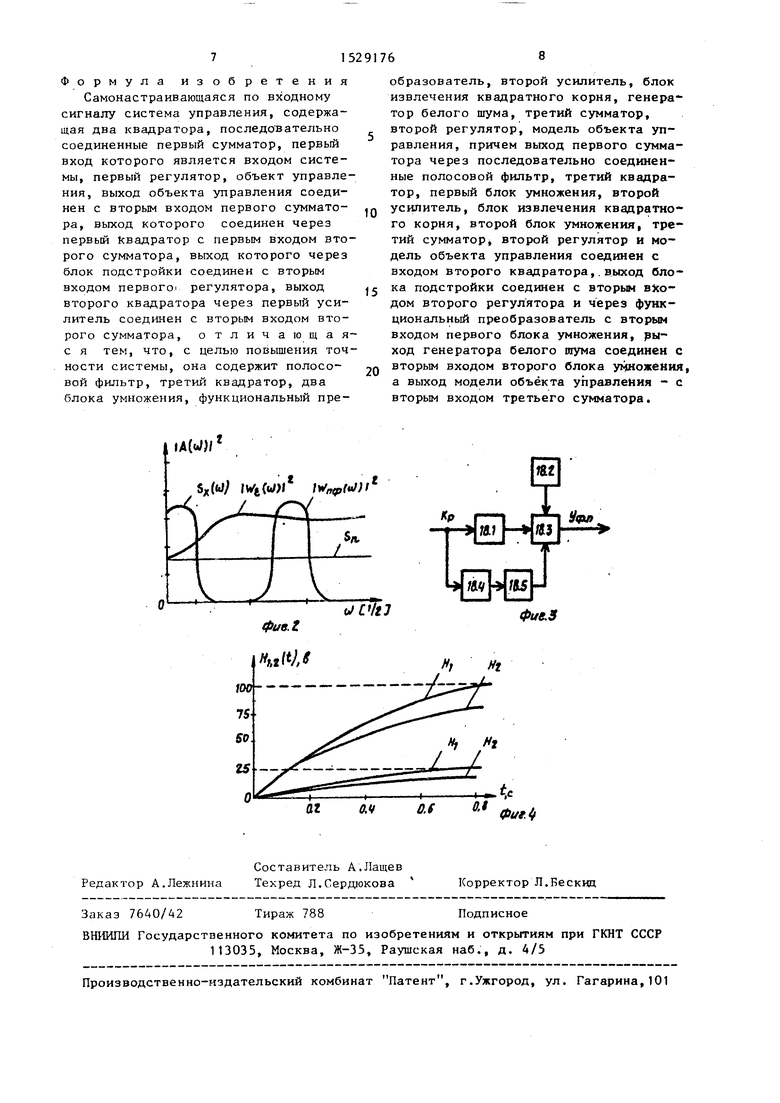
полезного сигнала S и помехи на фиг. 3 - структурная схема функционального преобразователя; на фиг.4 - графики зависимости среднего квадрата выходной координаты прототипа Н и предлагаемой системы И от времени
Самонастраивающаяся по входному сигналу система управления фиг.1) содержит сумматор 1, на вход которого подаются полезное воздействие х .и, помеха п. Вькод сумматора 1 соединен через последовательно соединенные регулятор 2 и объект 3 управления с вто рьм входом сумматора 1 , а .через последовательно соединенные полосовой фильтр 4, квадратор 5, блок 6 умножения, усилитель 7, блок 8 извлечения квадратного корня, блок 9 умножения, сумматор 10, регулятор.11, модель 12 объекта управления,квадратор 13 и усилитель 14 - с первым входом сумматора 15 и через квадратор 16 с вторым входом сумматора 15, выход которого через блок 17 подстройки соединен с вторыми входами регуляторов 2 и 11 и через функциональный преобразователь 18 с вторым входом блока 6 умножения Генератор 19 белого шума соединен с вторым входом блока 9 умножения, а выход модели 12 объекта управления - с вторым входом сумматора 10.
На фиг. 3 обозначены: 18.1 - усилитель; 18.2 - источник опорного напряжения; 18.3 - сумматор; 18.4 - квадратор выпрямитель); 18.5 - усилитель .
Обозначим передаточные функции регулятора 2 и объекта 3 управления Кр и Wj, соответственно. Тогда передаточная функция по ошибке
W(P)
1 + KpWo(P)
(I)
Анализ выражения (1) показьгеает, что при различных передаточных функциях объекта управления передаточная функция системы по ошибке имеет во много раз больше полосу пропускания, чем передаточная функция системы по выходной координате объекта управления.
Выб1траем передаточную функцию полосового фильтра ввда,
15
Wn.p(P)
Tj,P .
1 + 2|„Т„Р
Полосовой фильтр предназначен для вьделения помеховой составляющей входного сигнала. Частота настройки полосового фильтра.(фиг. |) выбирается на много больше максимальной частоты полезного входного воздействия, поэтому в полосе пропускания полосог- вого фипьтра сосредоточена только помеха .
Дисперсия сигнала на выходе полосового фипьтра с учетом передаточной функции системы по ошибке (J) имеет вид
Ч
(t) - -2 I Snlw(j«)|
-О |Wn,y(JW)| doO. - (3)
Параметры Т,,, полосового фильт- ра выбираются такими, чтобы амплитудно-частотная характеристика системы по ошибке Wc(j03) в полосе пропускания
полосового фильтра Wp(jQ) изменя- лась незначительно (фиг. 2). В этом случае вьфажение (3) можно записать в ввде
,lWg(j(Oj
(А)
- квадрат амплитудно- частотной характеристики системь по ошибке при Ы ОЭ„ -;;;-.
Выражение (4) с учетом (2) имеет
ввд
55 51, (t) . -§-4W|iicP ll.,
п -п
(5)
Из выражения (5) следует оценку спектральной плотности помехи
1() .aS.-pij-ij i--.-. (6)
где W.. (JCO) передаточная функция формирующего фильтра, состоящего из блоков 10-12:
JjSyИз выражения (6) следует, что дл формирования оценки спектральной плотности помехи необходимо оценку дисперсии с выхода квадратора 5 умножить на переменный коэффициент
)
к
фп
1Т„
IWc
. ,)Коэффициент (7) формируется циональным преобразователем 18ласно фиг, 1 дисперсия сигнала ки на выходе сумматора 1 имеет
G 1
2
tM
&п (О +G(t)
-of- I (jco)
-ta оо
+ S, W(jQ)rdcO ,
(В)
- - 2
где О (t) ,СУ (t) - дисперсии сигнала
ошибки, вызванные помехой и полезным сигналами соответственно .
Так как спектральная плотность помехи является белым шумом и не зависит от частоты, то дисперсию помеховой составляющей сигнала О ,(t) (8) определим методом формирующего фильтра с передаточной функций
ГГк(рГ
на вход которого подается оценка сигнала помехи с генератора 19 белого шума (фиг. 2) со спектральной плотностью Srg.
Критерием работы контура самонастройки является выражение
c;J(t) -&J(t) 0.
Для получения на выходе сумматора 15 сигнала, соответствующего методу Винера-КолМОгорова, необходимо согласно выражению С8)от оценки дисперсии сигнала ошибки CT(t) вьпесть удвоенную помеховую составляющую
Д
(31М. С1М - 2G(t) Cr,(t) ).
529176
Удвоение помеховой составляющей учитьшается в значении коэффициента усиления усилителя 14:
Для формирования оценки сигнала
помехи с требуемой спектральной плот- л
ность S воспользуемся соотношением п ,-nn(t)
геи
(t), (11)
где m - масштабный коэффициент;
S - уровень спектральной плотности сигнала на выходе генератора белого шума.
25
15
20
При условии, что шкалы электронных блоков самонастраивающейся системы и генератора белого шума совпадают, m 1 .
li этом случае выражение (11) примет вид
n(t) К7-Пген(О, (12)
где К - усилитель 7 с коэффициентом
1
усиления.
геи
35
Предлагаемая систама управления не требует изменения своей структуры в зависимости от изменения структуры 30 полезного входного воздействия.
Система управления работает следующим образом.
Полезный сих нал х и помеха п подаются на вход сумматора 1, с вьгхода кот торого сигнал поступает на первый вход регулятора 2. С выхода последнего сигнал через объект 3 управления подается на второй вход сумматора I.
дд Сигнал ошибки с выхода сумматора 1 через полосовой фильтр 4, квадратор 5, блок 6 умножения, усилитель 7, блок 8 извлечения квадратного корня, блок 9 умножения, сумматор 10, регудс лятор II, модель 12 объекта управления, квадратор 13 и усилитель 14 подается на первый вход сумматора I5 и через квадратор 16 на второй вход сумматора 15, с выхода которого сигCQ нал рассогласования через блок 17 подстройки поступает на вторые выходы регуляторов 2 и 11, а также через функциональ} Ь Й преобразователь 18 - на второй вход блока 6 умножения. С выхода генератора 19 белого иума случайный сигнал подается на второй вход блока 9 умножения. Сигнал с выхода модели 12 объекта управления поступает на второй вход сумматора 10.
55
Ф о рмула изобретения
Самонастраивающаяся по входному сигналу система управления, содержащая два квадратора, последовательно соединенные первый сумматор, первый вход которого является входом системы, первый регулятор, объект управления, выход объекта управления соединен с вторым входом первого сумматора, выход которого соединен через первый Квадратор с первым входом второго сумматора, выход которого через блок подстройки соединен с вторым входом первого регулятора, выход второго квадратора через первый усилитель соединен с вторым входом второго сумматора, отличающая- с я тем, что, с целью повышения точности системы, она содержит полосовой фильтр, третий квадратор, два блока умножения, функциональный преаг AV o.f o.t
образователь, второй усилитель, блок извлечения квадратного корня, генера тор белого шума, третий сумматор, второй регулятор, модель объекта управления, причем выход первого сумматора через последовательно соединенные полосовой фильтр, третий квадратор, первый блок умножения, второй
усилитель, блок извлечения квадратного корня, второй блок умножения, третий сумматорj второй регулятор и модель объекта управления соединен с входом второго квадратора,.вькод блока подстройки соединен с вторым sico- дом второго регулятора и через функциональный преобразователь с вторым входом первого блока умножения, ры- ход генератора белого шума соединен с
вторым входом второго блока умножения, а выход модели объекта управления - с вторым входом третьего сумматора.
фиг. If
