Изобретение относится к технической кибернетике и может быть использовано в система.ч с широким, априори неизвестным дианазоном изменения обобш:енных параметров объекта и возмущающих воздействий таких, например, как система стабилизации летательного аппарата или система автоматической на.стройки электронной аппаратуры и т. п.
Известное устройство кроме основного контура содержит контур самонастройки в виде :мостовой схемы. В плечи моста включены .основная система, содержащая регулятор и .объект регулирования, и эталонная модель юсновной системы. Диагональ моста состоит ИЗ последовательно соединенных сумматора, квадратичного детектора, сглаживающего фильтра, делительного устройства и корректирующего фильтра, подключенного к регулятору основной системы. При этом делителем устройства является выходная координата цепи, состоящей из квадратора, входом которого служит выходной сигнал эталонной модели и сглаживающего фильтра.
В этих самонастраивающихся устройствах длительность и форма переходного процесса по регулируемой контуром настройки координате, а также устойчивость контура самонастройки существенно зависят от величины коэффициента усиления объекта управления. При этом всегда имеется опасность, что при
достаточно больших зпаченнях коэффициента усилепия Ко объекта управления контур ластройки станет неустойчивым, а следовательно, утратит свою работоспособность. В то же
самое время при очень малых Ко длительность переходного процесса в контуре самонастройки становится чрезмерно большой, что также влечет за собой ухудшение работы основной системы управления.
Для расширения области устойчивой работы самонастраивающихся устройств в случае сверх широкого диапазона изменения коэффициента усиления объекта управления п улучщения динамических свойств контура самонастройки за счет устранения зависимости длительностии формы переходного процесса в нем от величины коэффициента усиления объекта управления предполагается ввести дополнптельную нелинейную обратную связь с
выхода контура самонастройки через блок изменения масштаба на вход множительного устройства. Множительное устройство стоит в диагонали моста. Оно включено последовательно между квадратичным детектором и
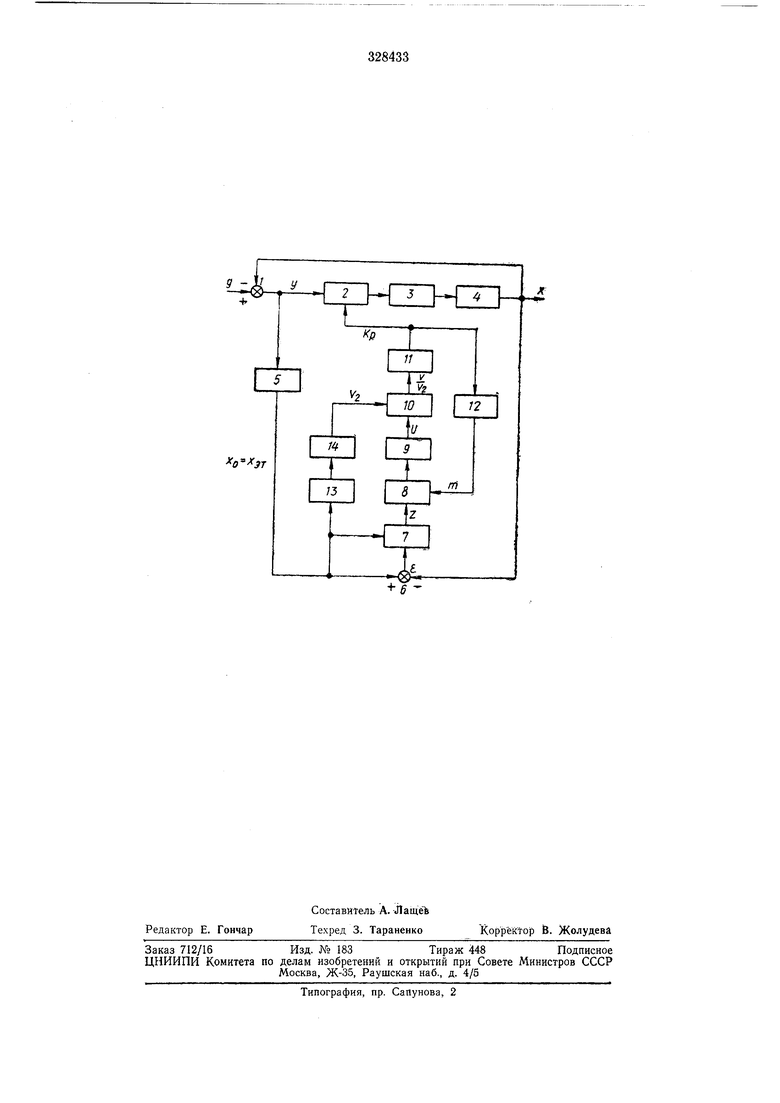
сглаживающим фильтром известного контура самонастройки, т. е. так, что вторым его сомножителем (входом) является выходной сигнал квадратичного детектора, а выходной сигнал (произведение) поступает на вход Введение дополнительной нелинейной обратной связи сохраняет устойчивость контура самонастройки, а следовательно, и работоспособность системы в целом при достаточно большом коэффициенте усиления Ко объекта унравления. При этом длительность и форма нереходных процессов в контуре самонастройки практически не зависит от дианазона изменения Ko(t). На чертеже представлено предлагаемое самонастраивающееся устройство. Основной контур системы управления состоит из последовательно соединенных четырех элементов схемы, где / - элемент сравнения, производящий операцию вычитания выходного сигнала х основной системы управления из входного сигнала g, например суммирующий усилитель постоянного тока. Входной сигнал равен g(t)f(t)+N(t}, где f{) -управляющая команда; ;V (t) - возмущение, действующее на вход основной системы; 2- регулятор коэффициента усиления Кр основного контура, например, электромеханическое или электронное множительное устройство;3- корректирующий фильтр, имеющий передаточную функцию Kfe(S), например, активная или пассивная цепь систем постоянного тока, где S - комплексный аргумент; 4- объект управления, имеющий передаточную функцию /Co(/)Wo(S), например, механическая, электрическая или электромеханическая система. Коэффициент усиления объекта является функцией времени t. Wo(S}-передаточная функция неизменяемой части объекта управления; Элементы схемы /-4 образуют первое плечо контура самонастройки, построенного по мостовой схеме. 5- эталонная модель основной системы управления с передаточной функцией 8т(5) , например, пассивная или Гоо -J-1 активная цепи систем постоянного тока. Входной координатой эталона является сигнал ощибки . Эталонная модель задает желаемые динамические свойства; 6- элемент сравнения, выполняющий операцию вычитания выходного сигнала системы X из выходного сигнала эталонной модели Хэт, например, суммирующий усилитель постоянного тока; 7- квадратичный детектор, осуществляющий операцию умножения сигналов е и Хэт, например, электронное множительное устройство;9 - сглаживающий фильтр, имеющий передаточную функцию Ф1(5) , например активная цепь систем постоянного тока; W - делитель, вычисляющий частные например, электромеханический или электронный умножитель в сочетании с усилителем постоянного тока; 11 - сглаживающий фильтр, имеющий передаточную функцию Ф2(5) ---;-, например активная цепь систем постоянного тока; 12 - блок изменения масщтаба, осуществляющий умножение на некоторое постоянное значение р, например потенциометр или усилитель постоянного тока; 13- квадратор, возводящий во вторую степень выходную координату Хзт эталонной модели, например электронное множительное устройство; 14- сглаживающий фильтр, имеющий передаточную функцию Фз(5) -г, наТ о -}- 1 пример активная цепь систем постоянного тока. Второе плечо моста образует эталонная модель. Диагональ мостовой схемы состоит из последовательно соединенных элементов схемы 7-11В дополнение к известному устройству блоки 9, 10, 11 диагонали моста охвачены месгпой нелинейной обратной связью с выхода блока 11, через блок 12 на вход множительного устройства 8, которое отсутствовало у прототипа. Описанный выще недостаток прототипа математически объясняется тем, что когда нелинейная обратная связь отсутствует, координаты 8 и /Cj) связаны уравнениями Z(f)X,,(f).(f).K,(t) f/(0 /Ti(--)2(a)do 1 (t-а) - импульсная переходная функция линейного звена //. Ср(0 ,(-г)У(г)т игнал V2 считаем здесь постоянным. 2(-т)- импульсная переходная функция линейного блока 9, или, объединяя эти уравнения, получаем p(f) I f( - ) /,(-)вт(-)()е (1) ) Из формулы (/) видно, что регулируемая онтуром настройки координата Кр сущетвенно зависит от величины /Со (о) ). При достаточно больщих по веичйне Ko(t) наступает неустойчивость конвает свою работоспособность. При малых же значениях /(о(О длительность переходных процессов значительно увеличивается и тем больше, чем меньше величина Ko(t). При прочих равных условиях, когда введена нелинейная обратная связь, уравнения, связывающие к li /Cj) уже имеют другой вид, а именно U(t} f , 3)Z(.)m(o) cp,(-a)Z(3) Здесь учтено то обстоятельство, что при заданной структуре основного контура целью самонастройки можно сичтать точное или приближенное выполнение равенства ,(2) где Kp(t); Ko(t и /Сэт - коэффициенты усиления регулятора, объекта управления и эталонной модели соответственно. Из уравнения (2) получаем -( с другой стороны чАt K,(i) -- I ( - З) ,(. - )зх()г() X 2 6о ; X - г - s) f а,( - /Со()V, о о - )X,,()z()i,ds. 5 10 15 20 25 30 в уравнении (3) наблюдавшейся ранее зависимости Kp(t) от Ко нет. Это связано с тем, что введена дополнительная нелинейная обратная связь. Сказанное остается справедливым и в том случае, если коэффициент Ко объекта в каждой реализации процесса принимает постоянные, по различные от реализации к реализации значения. Таким образом, донолнительная нелинейная обратная связь приводит к практической независимости длительности и формы переходных процессов по координате Кр, а также устойчивости контура самонастройки от диапазона изменения /Со(0Предмет изобретения Самонастраиваюшееся устройство с эталонной моделью по авт. св. № 261519, отличающееся тем, что, с целью рас1И 1рения области устойчивости устройства при широком диапазоне изменения коэффициента усиления объекта управления и улучнюппя качества переходного процесса в контуре самонастройки, в нем дополнительно установлены квадратичный детектор и блок изменения масштаба, вход которого соединен со входом регулятора с настраиваемым коэфф1п;иентом, а выход - с одним из входов дополнительного квадратичного детектора, другой вход которого соединен с выходом детектора, а выход - с входом первого сглаживающего фильтра.

| название | год | авторы | номер документа |
|---|---|---|---|
| САМОНАСТРАИВАЮЩАЯСЯ СИСТЕМА С ЭТАЛОННОЙ МОДЕЛЬЮ | 1970 |
|
SU269248A1 |
| САМОНАСТРАИВАЮЩЕЕСЯ УСТРОЙСТВО | 1969 |
|
SU240816A1 |
| АДАПТИВНАЯ СИСТЕМА УПРАВЛЕНИЯ | 2013 |
|
RU2541848C1 |
| Поисковый регулятор для резонансной настройки контура нулевой последовательности сети | 1982 |
|
SU1080231A1 |
| Самонастраивающаяся система регулирования | 1972 |
|
SU448432A1 |
| СИСТЕМА АВТОМАТИЧЕСКОГО РЕГУЛИРОВАНИЯ ГАЗОТУРБИННОГО ДВИГАТЕЛЯ | 2000 |
|
RU2172857C1 |
| Адаптивная система управления с нестационарным упругим механическим объектом | 1984 |
|
SU1188697A1 |
| СПОСОБ САМОНАСТРОЙКИ СИСТЕМЫ УПРАВЛЕНИЯ ОБЪЕКТОМ И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2005 |
|
RU2304298C2 |
| Автоматический регулятор резонанс-НОгО СОСТОяНия КОНТуРА НулЕВОйпОСлЕдОВАТЕльНОСТи СЕТи | 1979 |
|
SU813585A1 |
| Самонастраивающаяся система | 1984 |
|
SU1241192A1 |