Изобретение относится к авиационной технике, а именно к устройствам измерения аэродинамических углов (АУ), и предназначено для измерения угла атаки (скольжения) летательного аппарата (ЛА).
Целью изобретения является повышение точности определения углов атаки (скольжения) ЛА.
Устройство для определения углов атаки (скольжения) представлено на фиг. 1-2.
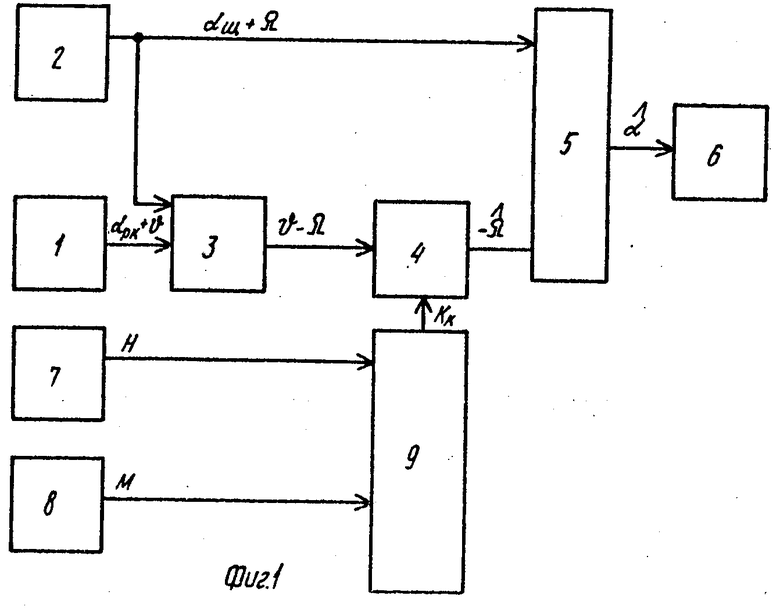
На фиг. 1 изображена структурная схема предлагаемого устройства.
Устройство для определения АУ ЛА состоит из первого и второго датчиков 1 и 2 АУ, блока 3 вычитания, фильтра 4 нижних частот первого порядка, сумматора 5, индикатора 6, баровысотомера 7, датчика 8 числа Маха и блока 9 определения поправки коэффициентов и постоянной времени фильтра нижних частот.
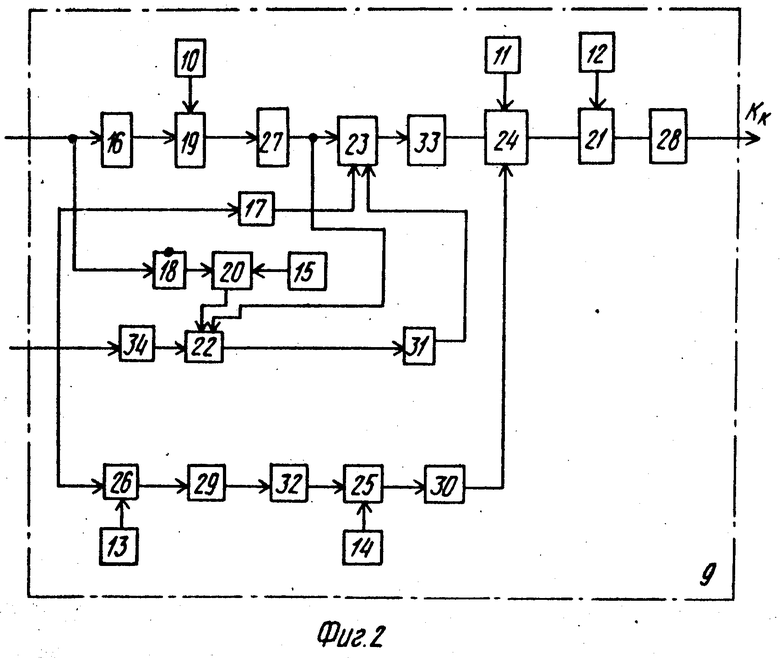
На фиг. 1 изображена функциональная схема блока определения поправки коэффициентов и постоянной времени фильтра нижних частот, которая содержит шесть задатчиков 10-15 постоянных параметров, формирователь 16 сигнала плотности воздуха, формирователь 17 декремента затухания сигнала датчика АУ на нулевой высоте, формирователь 18 сигнала скорости звука, три блока 19-21 деления, три блока 22-24 умножения, сумматор 25, блок 26 вычитания, два блока 27 и 28 извлечения квадратного корня, два квадратора 29 и 30, блок 31 возведения в третью ступень, два усилителя 32 и 33 и формирователь 34 сигнала собственной частоты колебания чувствительного элемента, датчика АУ на нулевой высоте.
Обоснование заявленного устройства определения углов атаки (скольжения) ЛА состоит в выводе передаточной функции оптимального низкочастотного фильтра, полностью учитывающего динамические и статические погрешности датчиков на всех режимах полета.
Известно, что наилучшее в смысле минимума дисперсии ошибки и несмещенности оценки является оценка, полученная на основе оптимальной фильтрации Калмана. Для линейной стохастической системы = Fy+Gu+ω
= Fy+Gu+ω
Z Hy + v (3) где Y вектор состояния системы;
u вектор управления;
ω вектор центрированного гауссовского белого шума с матрицей интенсивностей Sω, определяющей уровень флуктуационных ошибок объекта;
Z вектор наблюдений (измерений);
v вектор ошибок наблюдений с матрицей интенсивностей Sv, которая предполагается неособенной;
F, G известные матрицы соответствующих размерностей, алгоритм оценивания имеет вид F
F +Gu+k[Z-H
+Gu+k[Z-H ]
]
k PHтS-1 (4)
P FP + PFт PHтSv-1HP + m Sω, (4) где k коэффициент усиления оптимального фильтра;
Р дисперсионная матрица.
В динамическом отношении щелевой измеритель аэродинамических углов ШИАУ (датчик 2) представляет собой апериодическое звено и описывается дифференциальным уравнением вида
Y1 + μY1=μ(α(t)-Ω). (5) где Y1 сигнал с выхода ШИАУ;
μ собственная частота ШИАУ;
α (t) измеряемый угол атаки;
Ω постоянная аддитивная ошибка датчика.
Математическую модель датчика 1 флюгерного типа (ФИАУ) можно представить в виде звена второго порядка +
+  + νoY2= νoα(t)+
+ νoY2= νoα(t)+ (6) где Y2 сигнал с выхода ФИАУ;
(6) где Y2 сигнал с выхода ФИАУ;
νo квадрат собственной частоты ФИАУ; ν1=ω2;ν1=2ζω
ζ коэффициент относительного затухания ФИАУ.
Обозначим левую часть уравнения (5) через Z1, а левую часть уравнения (6) через Z2. Домножив Z1 на vo, а Z2 на μ, найдем их разность
Z νoZ1-μZ2= νoμα(t) νμΩ ν1μ α (t)  = νoμΩ,-
= νoμΩ,- 
Таким образом, уравнение наблюдения результирующего сигнала двух датчиков, в котором присутствуют только ошибки ФИАУ, и ШИАУ, выглядит в данном случае так
Z νoμΩ μ  (7)
(7)
Используя уравнение наблюдения (7), можно получить оптимальную оценку ошибки Ω датчика 2 ШИАУ. Так как ошибка является постоянной, справедливо следующее дифференциальное уравнение: =0 (8)
=0 (8)
Уравнение (8) является уравнением состояния "объекта" и совместно с уравнением наблюдения (7) позволяет использовать для оценки величины Ω непрерывный фильтр Калмана (4).
В рассматриваемом случае матрицы при векторах состояния, наблюдения и управления имеют следующие значения:
F O, H νoμ, G O
В стационарных системах обычно рассматривают установившийся режим работы. Переходный процесс предлагаемого устройства длится доли секунд и на его работу существенного влияния не оказывает.
Из уравнений системы (4) получим формулы для определения Р и k в установившемся режиме, когда Р 0. Третье уравнение дает +Sω= 0 откуда
+Sω= 0 откуда
P∞ 
(9) где Р∞- дисперсионная матрица в установившемся режиме.
Подставив выражение (9) во второе уравнение системы (4), найдем коэффициент усиления фильтра
K  HS
HS
Интенсивность Sω является постоянной и составляет величину порядка 1 ˙ 10-7, Sv есть интенсивность белого шума v на входе датчика 1 ФИАУ с передаточной функцией (см. формулу (6))
w(P) 
Величину Sv можно вычислить методом интегральной квадратичной оценки (4):
Sv μ22νoν1σ2α=4μ2ζω3σ2α, где σ2α дисперсия флуктуационной ошибки ФИАУ, зависящая от числа М полета (3).
Структуру фильтра 4 определим из уравнения оценки ошибки  :
: = k[Z-H
= k[Z-H ]
]
Передаточная функция фильтра 4 имеет вид
W Ω/z (P) 
 =
=  . (13)
. (13)
Вычитая из показаний ШИАУ αщ оценку его погрешности  , получим оптимальную оценку угла атаки
, получим оптимальную оценку угла атаки = αщ-Ω
= αщ-Ω
Работает предлагаемое устройство следующим образом.
Датчики 1, 2 АУ имеют существенно различные статистические характеристики ошибок (1).
Текущий АУ одновременно измеряется датчиком 1 и датчиком 2. Сигнал на выходе датчика 2 кроме измеренного значения αщ АУ содержит неизвестную аддитивную постоянную ошибку Ω. Сигнал на выходе датчика 1 с решетчатым крылом αрк кроме информации о значении АУ содержит высокочастотную флуктуационную ошибку v. Сигналы αрк+v и αщ+Ω вычитаются друг из друга на блоке вычитания. Полученная разность представляет собой суммарную ошибку датчиков. Эта разность освобождается от флуктуационной составляющей v c помощью фильтра 4 нижних частот и подается на вход сумматора 5, где компенсируется постоянная часть ошибки, складываясь с сигналом αщ+Ω Освобожденный от ошибок обоих датчиков сигнал α подается на индикатор 6. Коэффициент усиления низкочастотного фильтра и его постоянная времени корректируются по сигналу Kk, поступающему с блока 9 определения поправки коэффициентов и постоянной величины фильтра нижних частот, в зависимости от измерения режима полета, т.е. по сигналам, пропорциональным изменению высоты полета Н и числа М, поступающим с баровысотомера 7 и датчика 8 числа Маха.
Работа блока 9 осуществляется следующим образом. Сигнал с выхода баровысотомера 9 преобразуется в формирователе 16 в сигнал, пропорциональный плотности воздуха на высоте полета Н, в формирователе 18 в сигнал, пропорциональный скорости звука α (Н) на высоте Н. Сигнал с выхода датчика 8 числа Маха преобразуется в формирователе 17 в сигнал, пропорциональный ζ (М, О), в формирователе 34 в сигнал, пропорциональный ω (М, О). Блоки 13, 24, 25, 26, 29, 30, 32 формируют сигнал σα (М) (0,15 + (0,53 М)2 ˙ 1,2)2. Данный сигнал поступает на блок 24 умножения. На вход блока 23 умножения поступает сигнал, пропорциональный ζ (M, H) ζ (M,O)·  который формируется блоками 10, 16, 17, 19, 27. Бло- ками 15, 18, 20, 22, 34 формируется сигнал, пропорциональный собственной частоте колебания чувствительного элемента датчика в зависимости от режима полета (М, H) по алгоритму ω (M, H) ω (M,O)·
который формируется блоками 10, 16, 17, 19, 27. Бло- ками 15, 18, 20, 22, 34 формируется сигнал, пропорциональный собственной частоте колебания чувствительного элемента датчика в зависимости от режима полета (М, H) по алгоритму ω (M, H) ω (M,O)·  ·
·  . Указанный сигнал через блок 31 возведения в третью ступень поступает на вход блока 23 умножения. На выходе блока 24 формируется сигнал S(М, Н) 4 ˙ζ (М, Н) ω3 (М, Н)˙σ2α(М) μ2. Этот сигнал поступает на вход блока 21 деления, на другой вход которого поступает сигнал, пропорциональный Sω. Сигнал с выхода блока 21, пропущенный через блок извлечения квадратного корня, пропорционален коэффициенту K
. Указанный сигнал через блок 31 возведения в третью ступень поступает на вход блока 23 умножения. На выходе блока 24 формируется сигнал S(М, Н) 4 ˙ζ (М, Н) ω3 (М, Н)˙σ2α(М) μ2. Этот сигнал поступает на вход блока 21 деления, на другой вход которого поступает сигнал, пропорциональный Sω. Сигнал с выхода блока 21, пропущенный через блок извлечения квадратного корня, пропорционален коэффициенту K  , который и является выходом блока 9.
, который и является выходом блока 9.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ ОГРАНИЧЕНИЯ УГЛА АТАКИ САМОЛЕТА | 2005 |
|
RU2281882C1 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ СКОРОСТЬЮ ПОЛЕТА ЛЕТАТЕЛЬНОГО АППАРАТА | 1990 |
|
SU1829279A1 |
| СПОСОБ АВТОНОМНОГО ФОРМИРОВАНИЯ СИГНАЛА УГЛА АТАКИ ЛЕТАТЕЛЬНОГО АППАРАТА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2005 |
|
RU2289840C1 |
| Вычислитель угла атаки | 1983 |
|
SU1129630A1 |
| СПОСОБ ФОРМИРОВАНИЯ СИГНАЛА УГЛА АТАКИ ЛЕТАТЕЛЬНОГО АППАРАТА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2003 |
|
RU2257605C2 |
| СПОСОБ ФОРМИРОВАНИЯ СИГНАЛА УГЛА АТАКИ ЛЕТАТЕЛЬНОГО АППАРАТА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2003 |
|
RU2254604C2 |
| УСТРОЙСТВО ОПРЕДЕЛЕНИЯ ТЯГИ ДВИГАТЕЛЕЙ САМОЛЕТА | 2015 |
|
RU2582492C1 |
| ГИРОКОМПАСНАЯ СИСТЕМА ОРИЕНТАЦИИ ИСКУССТВЕННОГО СПУТНИКА ЗЕМЛИ | 2012 |
|
RU2498216C1 |
| СПОСОБ ФОРМИРОВАНИЯ СИГНАЛА УГЛОВОЙ СТАБИЛИЗАЦИИ ПО КРЕНУ ЛЕТАТЕЛЬНОГО АППАРАТА С ОЦЕНКОЙ И КОМПЕНСАЦИЕЙ ВНЕШНЕГО ВОЗМУЩЕНИЯ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2015 |
|
RU2601032C1 |
| СПОСОБ ФОРМИРОВАНИЯ СИГНАЛА УПРАВЛЕНИЯ РУЛЕВЫМ ПРИВОДОМ БЕСПИЛОТНОГО ЛЕТАТЕЛЬНОГО АППАРАТА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2018 |
|
RU2681823C1 |
Изобретение относится к авиационной технике, а именно к устройствам измерения аэродинамических углов, и предназначено для измерения угла атаки летательного аппарата. Целью изобретения является повышение точности определения углов атаки (скольжения). Для этого в устройство вводят датчик числа Маха, баровысотомер и блок определения поправки коэффициентов и постоянной времени фильтра нижних частот, причем фильтр нижних частот выполнен в виде фильтра нижних частот 1-го порядка, а блок определения поправки коэффициентов и постоянной времени фильтра нижних частот содержит шесть задатчиков постоянных параметров, формирователь сигнала плотности воздуха, формирователь сигнала скорости звука, формирователь декремента затухания сигнала датчика аэродинамического угла на нулевой высоте, формирователь сигнала собственной частоты колебания чувствительного элемента датчика аэродинамического угла на нулевой высоте, три блока деления, три блока умножения, сумматор, блок вычитания, два блока извлечения квадратного корня, два квадратора, блок возведения в третью степень и два усилителя. 2 ил.
УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ УГЛОВ АТАКИ (СКОЛЬЖЕНИЯ) ЛЕТАТЕЛЬНОГО АППАРАТА, содержащее первый и второй датчики аэродинамического угла, блок вычитания, фильтр нижних частот сумматор и индикатор, причем выход первого датчика аэродинамического угла соединен с первым входом блока вычитания, выход которого соединен с входом фильтра нижних частот, выход которого соединен с первым входом сумматора, выход которого соединен с входом индикатора, второй вход сумматора соединен с выходом второго датчика аэродинамического угла, отличающееся тем, что, с целью повышения точности определения углов атаки (скольжения), в него введены датчик числа Маха, баровысотометр, и блок определения поправки коэффициентов и постоянной времени фильтра нижних частот, причем фильтр нижних частот выполнен в виде фильтра нижних частот 1-го порядка, при этом выход баровысотометра соединен с первым входом блока определения поправки коэффициентов и постоянной времени фильтра нижних частот, выход которого соединен с входом регулировки фильтра нижних частот, второй вход блок определения поправки коэффициентов и постоянной времени фильтра нижних частот с выходом датчика числа маха, а выход второго датчика аэродинамического угла соединен с вторым входом блока вычитания, блок определения поправки коэффициентов и постоянной времени фильтра нижних частот содержит шесть задатчиков постоянных параметров, формирователь сигнала плотности воздуха, формирователь сигнала скорости звука, формирователь декремента затухания сигнала датчика аэродинамического угла на нулевой высоте, формирователь сигнала собственной частоты колебания чувствительного элемента датчика аэродинамического угла на нулевой высоте, три блока деления, три блока умножения, сумматор блока вычитания, два блока извлечения квадратного корня, два квадратора, блок возведения в третью степень и два блока усиления, причем последовательно соединены формирователь плотности воздуха, первый блок деления, первый блок извлечения квадратного корня, первый блок умножения, первый блок усиления, второй блок умножения, второй блок деления и второй блок извлечения квадратного корня, последовательно соединены формирователь сигнала скорости звука, третий блок деления, третий блок умножения и блок возведения в третью степень, последовательно соединены блок вычитания, первый квадратор, второй блок усиления, сумматор, второй квадратор, при этом выход первого задатчика постоянных параметров соединен с вторым входом первого блока деления, выход второго задатчика постоянных параметров соединен с вторым входом второго блока умножения, третий вход которого соединен с выходом второго квадратора, выход третьего задатчика постоянных параметров соединен с вторым входом второго блока деления, выход четвертого задатчика постоянных параметров соединен с вторым входом третьего блока деления, выход пятого задатчика постоянных параметров соединен с вторым входом сумматора, выход шестого задатчика постоянных параметров соединен с первым входом блока вычитания, второй вход которого соединен с входами формирователя декремента затухания сигнала датчика аэродинамического угла на нулевой высоте и формирователя сигнала собственной чистоты колебания чувствительного элемента датчика аэродинамического угла на нулевой высоте, которые являются вторым входом блока определения поправки коэффициентов и постоянной времени фильтра нижних частот, второй вход которого соединен с входом формирователя сигнала плотности воздуха и формирователя сигнала скорости звука, выход формирователя сигнала собственной частоты колебания чувствительного элемента датчика аэродинамического угла на нулевой высоте соединен с вторым входом третьего блока умножения, третий вход которого соединен с выходом первого блока извлечения квадратного корня, выход формирователя декремента затухания сигнала датчика аэродинамического угла на нулевой высоте соединен с вторым входом третьего блока умножения, третий вход которого соединен с выходом блока возведения в третью степень, выход второго блока извлечения квадратного корня является выходом блока определения поправки коэффициентов и постоянной времени фильтра нижних частот.
| Авторское свидетельство СССР N 934657, кл | |||
| Нефтяной конвертер | 1922 |
|
SU64A1 |
