Изобретение относится к электрическим самонастраивающимся системам управления, а именно к области адаптивных систем управления с пробным гармоническим сигналом, и предназначено для управления химическими, энергетическими, электромеханическими и другими объектами с переменными или нестационарными параметрами.
Наиболее близким по технической сущности к предлагаемому решению является самонастраивающаяся система управления с гармоническим пробным сигналом (патент РФ №2068196, кл. G05B 13/02), содержащая регулятор, объект управления, выход которого подключен к первому входу измерителя амплитуды и фазы, первый вход которого соединен с первым входом вычислительного блока, выход которого соединен с входом подстройки параметров регулятора, сигнальный вход которого соединен с выходом устройства сравнения, первый вход которого является входом задания системы, сумматор и генератор пробных гармонических колебаний, блок фазовой подстройки, вход которого соединен с вторым выходом измерителя амплитуды и фазы, заграждающий фильтр и блок вычисления коэффициентов заграждающего фильтра, вход которого соединен с выходом блока фазовой подстройки, подключенным к второму входу вычислительного блока и к входу генератора пробных гармонических колебаний, выход которого соединен с вторым входом измерителя амплитуды и фазы и с первым входом сумматора, второй вход которого подключен к выходу регулятора, а выход к входу объекта управления, выход которого соединен с информационным входом заграждающего фильтра, подключенного выходом к второму входу устройства сравнения, а управляющим входом к выходу блока вычисления коэффициентов заграждающего фильтра.
Недостатком известной системы являются ее неудовлетворительные динамические характеристики, обусловленные наличием заграждающего фильтра 2-го порядка в контуре управления, что приводит к уменьшению запасов устойчивости системы по амплитуде и фазе и появлению в цепи обратной связи пары комплексных корней, существенно повышающих колебательность и длительность переходных процессов в системе.
Задачей изобретения является улучшение динамических характеристик системы и повышение запасов устойчивости системы по амплитуде и фазе.
Указанный результат достигается тем, что в адаптивную систему управления, включающую регулятор, объект управления, выход которого подключен к первому входу измерителя амплитуды и фазы, первый выход которого соединен с первым входом вычислительного блока, выход которого соединен с входом подстройки параметров регулятора, сигнальный вход которого соединен с выходом устройства сравнения, первый вход которого является входом задания системы, первый сумматор, генератор пробных гармонических колебаний, блок фазовой подстройки, вход которого соединен с вторым выходом измерителя амплитуды и фазы, первый заграждающий фильтр, блок вычисления коэффициентов заграждающего фильтра, вход которого объединен с вторым входом вычислительного блока и входом генератора пробных гармонических колебаний и подключен к выходу блока фазовой подстройки, выход генератора пробных гармонических колебаний соединен с вторым входом измерителя амплитуды и фазы и с первым входом сумматора, второй вход которого подключен к выходу регулятора, а выход к входу объекта управления, выход которого соединен с информационным входом первого заграждающего фильтра, управляющий вход которого подключен к выходу блока вычисления коэффициентов заграждающего фильтра, введены второй заграждающий фильтр, второй сумматор, второй вычислительный блок и модель объекта управления, первый вход которой подключен к выходу регулятора, а выход к первому входу второго сумматора и информационному входу второго заграждающего фильтра, управляющий вход которого подключен к выходу блока вычисления коэффициентов заграждающего фильтра, выходы первого и второго заграждающих фильтров подключены к второму и третьему входам второго сумматора соответственно, выход второго сумматора подключен к второму входу устройства сравнения, второй вход модели объекта управления подключен к выходу второго блока вычисления, первый, второй и третий входы которого подключены к первому и второму выходам измерителя амплитуды и фазы и к выходу блока фазовой автоподстройки соответственно.
Кроме того
- регулятор выполнен на основе цифрового скоростного ПИД-регулятора,
- измеритель амплитуды и фазы выполнен на основе дискретного фильтра Фурье.
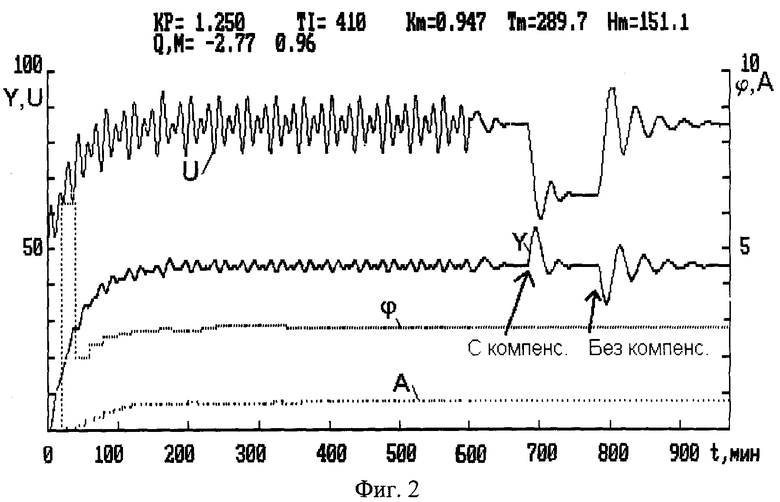
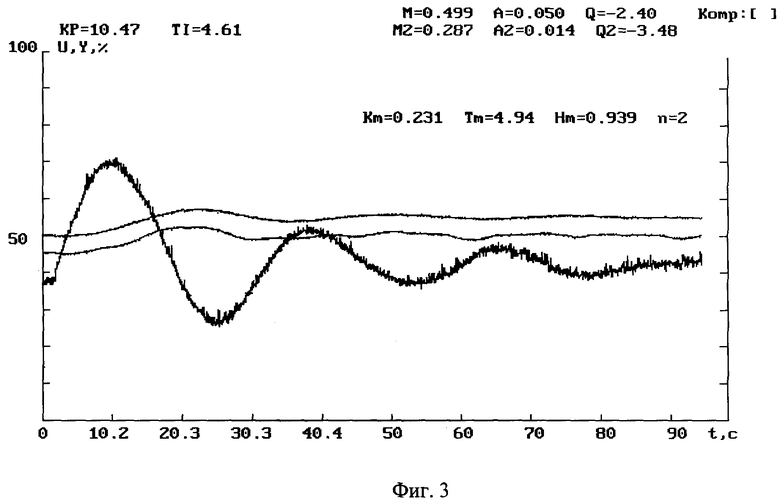
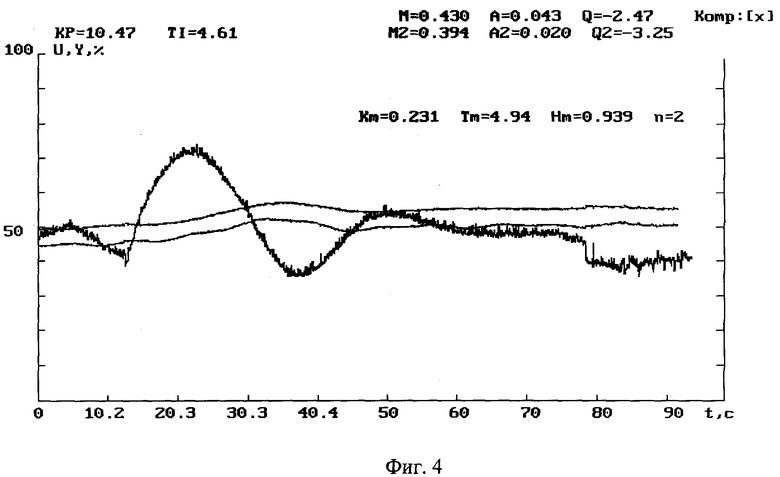
Изобретение поясняется с помощью чертежей, где на Фиг.1. показана структурная схема адаптивной системы управления, на Фиг.2. - графики переходных процессов при отработке возмущающих скачкообразных воздействий с включенной и выключенной компенсацией негативного влияния заграждающих фильтров, на Фиг.3 - график отработки смены задания в системе управления без компенсации негативного влияния заграждающих фильтров (прототип), на Фиг.4 - график отработки смены задания в адаптивной системе управления с компенсацией негативного влияния заграждающих фильтров.
Адаптивная система управления включает регулятор 1, выполненный на основе цифрового скоростного ПИД-регулятора, объект 2 управления, выход которого подключен к первому входу измерителя 3 амплитуды и фазы, выполненный на основе дискретного фильтра Фурье, первый выход которого соединен с первым входом первого 4 вычислительного блока, выход которого соединен с входом подстройки параметров регулятора 1, сигнальный вход которого соединен с выходом устройства 5 сравнения, первый вход которого является входом задания системы, первый сумматор 6, генератор 7 пробных гармонических колебаний, блок 8 фазовой подстройки, вход которого соединен с вторым выходом измерителя 3 амплитуды и фазы, первый 9 заграждающий фильтр, блок 10 вычисления коэффициентов заграждающего фильтра, вход которого объединен с вторым входом вычислительного блока и входом генератора пробных гармонических колебаний и подключен к выходу блока 8 фазовой подстройки, выход генератора пробных гармонических колебаний соединен с вторым входом измерителя амплитуды и фазы и с первым входом первого сумматора, второй вход которого подключен к выходу регулятора, а выход к входу объекта управления, выход которого соединен с информационным входом первого заграждающего фильтра, управляющий вход которого подключен к выходу блока вычисления коэффициентов заграждающего фильтра, введены второй 11 заграждающий фильтр, второй 12 сумматор, второй 13 вычислительный блок и модель 14 объекта управления, первый вход которой подключен к выходу регулятора, а выход к первому входу второго сумматора и информационному входу второго заграждающего фильтра, управляющий вход которого подключен к выходу блока вычисления коэффициентов заграждающего фильтра, выходы первого и второго заграждающих фильтров подключены к второму и третьему входам второго сумматора соответственно, выход второго сумматора подключен к второму входу устройства сравнения, второй вход модели объекта управления подключен к выходу второго блока вычисления, первый, второй и третий входы которого подключены к первому и второму выходам измерителя амплитуды и фазы и к выходу блока фазовой автоподстройки соответственно.
Адаптивная система управления работает следующим образом.
Генератор 7 пробных гармонических колебаний формирует пробный сигнал
 ,
,
где k - текущий номер периода квантования;
Rг - заданное значение амплитуды тестовой гармоники;
δ[k] - дискретное время генератора пробных колебаний, зависящее от текущей величины нормируемого периода колебаний Nj и определяющееся соотношением δ[k]=δ[k]+2π/Nj, при этом если δ[k]≥2π, то δ[k]=δ[k]-2π.
Nj - нормированный период, который связан с частотой пробных колебаний соотношением
ω=2π/(NjTq),
где Tq - период квантования.
Измеритель 3 амплитуды и фазы, представляющий собой дискретный фильтр Фурье по m-периодов пробных колебаний определяет на j-ом цикле адаптации оценки амплитуды  (j) и фазы
(j) и фазы  (j) гармонической составляющей в сигнале Y[k], согласно формулам
(j) гармонической составляющей в сигнале Y[k], согласно формулам

где Rs(j), Rc(j) - синусная и косинусная составляющие сигнала УВД;
m - число анализируемых периодов колебаний, варьируя которое можно достичь повышения помехоустойчивости контура адаптации в зависимости от «зашумленности» Y[k].
Длительность анализируемой на j-м цикле последовательности, в течение которой не меняется частота генератора, равна mNjTq. При работе адаптивной системы управления в реальном времени текущие значения сигнала с выхода объекта управления Y[k] получают путем аналого-цифрового преобразования.
При настройке в условиях высокого уровня шумов полученные на j-м цикле адаптации величины текущих оценок амплитуды  (j) и фазы
(j) и фазы  (j) вектора АФХ объекта могут быть подвергнуты сглаживанию, например методом скользящего среднего. Кроме того, для ослабления шума, создающего помехи наблюдениям, рекомендуется, а в большинстве случаев необходимо, использование совместно с фильтром Фурье дополнительного полосового фильтра, средняя частота которого должна быть жестко связана с частотой пробных колебаний ω. Полосовой фильтр может быть построен на базе уже включенных в структуру системы заграждающих фильтров.
(j) вектора АФХ объекта могут быть подвергнуты сглаживанию, например методом скользящего среднего. Кроме того, для ослабления шума, создающего помехи наблюдениям, рекомендуется, а в большинстве случаев необходимо, использование совместно с фильтром Фурье дополнительного полосового фильтра, средняя частота которого должна быть жестко связана с частотой пробных колебаний ω. Полосовой фильтр может быть построен на базе уже включенных в структуру системы заграждающих фильтров.
Блок 8 фазовой подстройки работает, в простейшем случае, по интегральному закону управления, так как скачки по пробной частоте нежелательны. Он, путем изменения частоты колебаний ω генератора, отслеживает фазовый сдвиг между входной и выходной гармониками объекта на уровне φ3=-π рад. Используется следующий вид закона управления блока фазовой подстройки частоты:
 ,
,
где β выбирается в диапазоне 0.5÷1,5, обеспечивающем устойчивую работу контура адаптации для объектов с различными величинами запаздывания.
Первый 4 вычислительный блок. По достижении или удержании, в случае непрерывной адаптации, установившегося значения фазового сдвига величины -π рад:
|(j)-φ3|≤γ, где γ точность слежения, блок фазовой подстройки разрешает работу вычислительного блока. Обычно, в зависимости от точности используемых АЦП, γ=0.05÷0.2. Первый вычислительный блок определяет настройки регулятора согласно известным формулам Циглера-Николса следующим образом:
 ;
;  ,
,
где kp, Ти и Т∂ - параметры настройки адаптивной системы управления, нормированные по периоду квантования Tq.
При этом регулятор в адаптивной системе управления должен быть с зависимыми настройками.
Регулятор 1 реализует алгоритм цифрового скоростного ПИД- регулятора с фильтрацией Д составляющей. Он получается путем дискретизации соответствующего непрерывного ПИД-регулятора, и закон управления выглядит следующим образом:
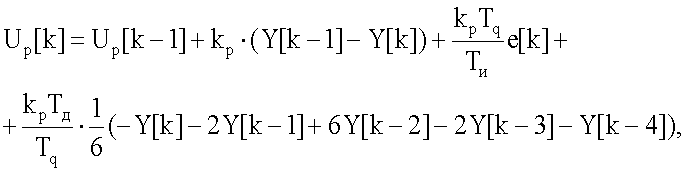
где kp - коэффициент передачи регулятора, Ти - постоянная времени изодрома регулятора, Тд - постоянная времени дифференцирования регулятора.
Второй 13 вычислительный блок обеспечивает определение параметров kм и Тм, которые определяются по известным характеристикам вектора АФХ объекта  и
и  , найденным контуром самонастройки, по соотношениям
, найденным контуром самонастройки, по соотношениям
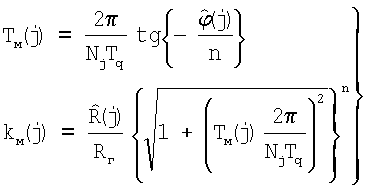
где (J) - установившаяся амплитуда колебаний на выходе объекта управления на j-м цикле адаптации;
(j) - разность фаз гармоники с нормированным периодом пробных колебаний N на выходе объекта и фазы пробного сигнала Uг[k],
n - порядок полинома.
Модель 14 объекта управления описывается следующим выражением:

где коэффициенты α, β, а1, а2, а3, b1 и b2 вычисляются через параметры объекта kм,
Tм и период квантования Tq по формулам
 ,
,  ,
,
a1=3α, a2=-3α2, a3=α3, b1=αβ, b2=-α2β.
Второй 11 заграждающий фильтр, являющийся фильтром второго порядка реализует в координатах "вход-выход" следующий алгоритм работы:
Yф[k]=-cYф[k-2]+b(Y[k-1]-Yф[k-1])+a(Y[k-2]+Y[k]),
где коэффициенты фильтра а, b, с вычисляются через нормированный период Nj пробных колебаний на j-м цикле самонастройки по формулам
Добротность фильтра Dф должна находиться в диапазоне 1-10, причем, чем больше добротность, тем меньше влияние фильтра на динамику системы, меньше чувствительность к шумам.
На вход объекта управления 2 подается сумма сигналов с выхода регулятора Up(t) и пробное гармоническое воздействие Uг(t) с генератора пробных гармонических колебаний, частота которого может изменяться. Измеритель амплитуды и фазы путем умножения выходного сигнала Y(t) на опорный сигнал Uг(t) с амплитудой Rг осуществляет выделение текущих значений амплитуды и фазы гармонической составляющей на выходе объекта управления Y(t). Таким образом, оценивается положение вектора АФХ объекта. Блок 8 фазовой подстройки частоты изменяет частоту колебаний цифрового генератора таким образом, чтобы поддерживать текущий фазовый сдвиг на заданном уровне φ3=-π. При каждой смене частоты пробных колебаний генератора блок вычисления коэффициентов заграждающего фильтра осуществляет пересчет коэффициентов цифровых заграждающих фильтров 9 и 11. Первый заграждающий фильтр в цепи главной обратной связи исключает пробную гармонику из замкнутого контура управления, что и позволяет определить вектор АФХ объекта при сохранении процесса управления объектом.
Первый вычислительный блок при достижении фазой с определенной точностью заданного значения -π производит расчет настроек ПИД-регулятора, используя коэффициент усиления объекта управления на критической частоте
180/Rг. Второй вычислительный блок 13 по значениям текущих оценок амплитуды и фазы вектора АФХ объекта обеспечивает построение модели объекта управления. Модель объекта строится в виде инерционного звена с передаточной функцией
 ,
,
где kм и Тм - коэффициент передачи и постоянная времени модели объекта управления соответственно, при фиксированном значении порядка модели n.
Порядок полинома для широкого круга объектов n=2÷4. Второй 11 заграждающий фильтр абсолютно идентичен по своим параметрам первому 9 фильтру и совместно с моделью 14 объекта управления создает компенсацию негативного влияния.
При равенстве передаточных функций объекта 2 управления и модели 14 объекта управления фактически процесс регулирования осуществляется по каналу: ПИД-регулятор 1, модель 14 объекта управления, второй 11 заграждающий фильтр (включенный по схеме избирательного фильтра). Таким образом, по этому каналу в основной контур регулирования вводится потерянная ранее дополнительная гармоническая составляющая, что способствует улучшению динамики основного контура регулирования, позволяет в отличие от прототипа, установить в регуляторе его оптимальные настройки при сохранении непрерывной работы контура самонастройки. Последнее обстоятельство позволяет использовать предложенную адаптивную систему для управления объектами с переменными параметрами.
В адаптивной системе управления не требуется точного совпадение передаточных функций объекта и модели в широком диапазоне частот, так как достаточно близкое совпадение их частотных характеристик необходимо обеспечить лишь в области критической частоты колебаний объекта. Последний факт и то, что управление не является идентификационным, то есть модель объекта управления не участвует в формировании коэффициентов регулятора kp, Ти и Т∂, а работает только в контуре компенсации, позволяют применить достаточно простую модель.
Исследование динамики адаптивной системы управления проводилось путем моделирования на ЭВМ. На Фиг.2 изображены графики переходных процессов при отработке возмущающих скачкообразных воздействий (прямого и обратного) с включенным и выключенным блоком компенсации негативного влияния заграждающих фильтров.
Как видно из графиков, возмущения отрабатываются при компенсации быстрее в 2-4 раза при заметно меньшей колебательности переходных процессов в системе.
Был проведен также эксперимент по управлению адаптивной системы управления в режиме реального времени. В качестве объекта использовался электротехнический объект, описываемый передаточной функцией пятого порядка. Алгоритм управления был реализован на языке C++ и выполнялся на управляющей ЭВМ, оснащенной комплектом аналоговых плат ввода-вывода.
Результаты исследования динамики основного контура системы управления без блока компенсации (прототип), и с включенной компенсацией приведены на Фиг.3 и Фиг.4, соответственно. Как показали исследования, которые проводились на цифровой модели и в масштабе реального времени на электротехническом объекте отработка воздействий системой с компенсацией проходит в два раза быстрее, чем без нее, при значительном снижении колебательности процессов и сохранении оптимальных настроек.
Это позволяет осуществлять непрерывную подстройку регулятора с частотно-зависимой обратной связью в процессе длительной работы системы без потери качества ее динамических свойств. Приведенные примеры практического использования говорят о перспективности использования предлагаемой адаптивной системы управления при управлении технологическими объектами с переменными параметрами, так как она обеспечивает постоянную оптимальную подстройку регулятора при изменении параметров объекта управления в процессе нормальной эксплуатации, используя весьма простую математическую модель, имеет высокое быстродействие и помехозащищенность.
Таким образом, адаптивная система управления имеет более высокие динамические характеристики и более высокий запас устойчивости системы по амплитуде и фазе по сравнению с прототипом.
| название | год | авторы | номер документа |
|---|---|---|---|
| АДАПТИВНАЯ СИСТЕМА УПРАВЛЕНИЯ | 2007 |
|
RU2343524C1 |
| АДАПТИВНАЯ СИСТЕМА УПРАВЛЕНИЯ | 2007 |
|
RU2339988C1 |
| АДАПТИВНАЯ СИСТЕМА УПРАВЛЕНИЯ | 2011 |
|
RU2461037C1 |
| САМОНАСТРАИВАЮЩАЯСЯ СИСТЕМА УПРАВЛЕНИЯ | 1992 |
|
RU2068196C1 |
| Способ адаптивного управления плохо формализуемым объектом | 2016 |
|
RU2612084C1 |
| Адаптивная электрогидравлическая следящая система с модулированной осцилляцией | 2016 |
|
RU2627956C1 |
| СПОСОБ НАСТРОЙКИ ПАРАМЕТРОВ РЕГУЛЯТОРА ВОЗБУЖДЕНИЯ СИНХРОННОГО ЭЛЕКТРИЧЕСКОГО ГЕНЕРАТОРА | 2012 |
|
RU2498495C1 |
| ИНТЕГРИРОВАННАЯ АВТОМАТИЗИРОВАННАЯ СИСТЕМА КОНТРОЛЯ И УПРАВЛЕНИЯ СИСТЕМАМИ ЖИЗНЕОБЕСПЕЧЕНИЯ И ЗАЩИТЫ СПЕЦИАЛЬНЫХ ОБЪЕКТОВ | 2014 |
|
RU2566341C2 |
| АДАПТИВНАЯ СИСТЕМА УПРАВЛЕНИЯ | 2015 |
|
RU2612340C1 |
| СПОСОБ ПОДАВЛЕНИЯ ШУМА В ИНФОРМАЦИОННОМ СИГНАЛЕ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2002 |
|
RU2206960C1 |
Изобретение относится к электрическим самонастраивающимся системам управления. Технический результат заключается в улучшении динамических характеристик системы и повышении запасов устойчивости системы по амплитуде и фазе. Он достигается тем, что адаптивная система управления содержит регулятор, объект управления, измеритель амплитуды и фазы, первый вычислительный блок, устройство сравнения, первый сумматор, генератор пробных гармонических колебаний, блок фазовой подстройки, первый заграждающий фильтр, блок вычисления коэффициентов заграждающего фильтра, второй заграждающий фильтр, второй сумматор, второй вычислительный блок и модель объекта управления. 2 з.п. ф-лы, 4 ил.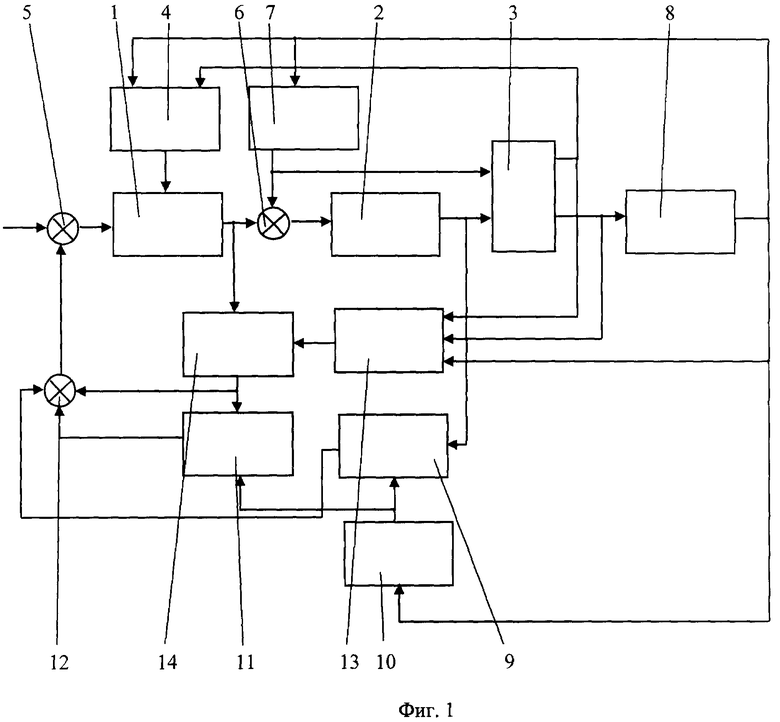
1. Адаптивная система управления, включающая регулятор, объект управления, выход которого подключен к первому входу измерителя амплитуды и фазы, первый выход которого соединен с первым входом вычислительного блока, выход которого соединен с входом подстройки параметров регулятора, сигнальный вход которого соединен с выходом устройства сравнения, первый вход которого является входом задания системы, первый сумматор, генератор пробных гармонических колебаний, блок фазовой подстройки, вход которого соединен с вторым выходом измерителя амплитуды и фазы, первый заграждающий фильтр, блок вычисления коэффициентов заграждающего фильтра, вход которого объединен с вторым входом вычислительного блока и входом генератора пробных гармонических колебаний и подключен к выходу блока фазовой подстройки, выход генератора пробных гармонических колебаний соединен с вторым входом измерителя амплитуды и фазы и с первым входом сумматора, второй вход которого подключен к выходу регулятора, а выход к входу объекта управления, выход которого соединен с информационным входом первого заграждающего фильтра, управляющий вход которого подключен к выходу блока вычисления коэффициентов заграждающего фильтра, отличающаяся тем, что в нее введены второй заграждающий фильтр, второй сумматор, второй вычислительный блок и модель объекта управления, первый вход которой подключен к выходу регулятора, а выход к первому входу второго сумматора и информационному входу второго заграждающего фильтра, управляющий вход которого подключен к выходу блока вычисления коэффициентов заграждающего фильтра, выходы первого и второго заграждающих фильтров подключены к второму и третьему входам второго сумматора, соответственно, выход второго сумматора подключен к второму входу устройства сравнения, второй вход модели объекта управления подключен к выходу второго блока вычисления, первый, второй и третий входы которого подключены к первому и второму выходам измерителя амплитуды и фазы и к выходу блока фазовой автоподстройки, соответственно.
2. Адаптивная система управления по п.1, отличающаяся тем, что регулятор выполнен на основе цифрового скоростного ПИД регулятора.
3. Адаптивная система управления по п.1, отличающаяся тем, что измеритель амплитуды и фазы выполнен на основе дискретного фильтра Фурье.
| САМОНАСТРАИВАЮЩАЯСЯ СИСТЕМА УПРАВЛЕНИЯ | 1992 |
|
RU2068196C1 |
| АДАПТИВНАЯ СИСТЕМА УПРАВЛЕНИЯ | 2002 |
|
RU2230351C2 |
| RU 2058576 С1, 20.04.1996 | |||
| US 2006069454 А1, 30.03.2006. | |||

