Изобретение относится к импульсной технике и может быть использовано в микропроцессорных селекторах импульсного сигнала с инерционно изменяющейся во времени амплитудой.
Цель изобретения - повьш1ение помехозащищенности за счет адаптации порогового уровня.
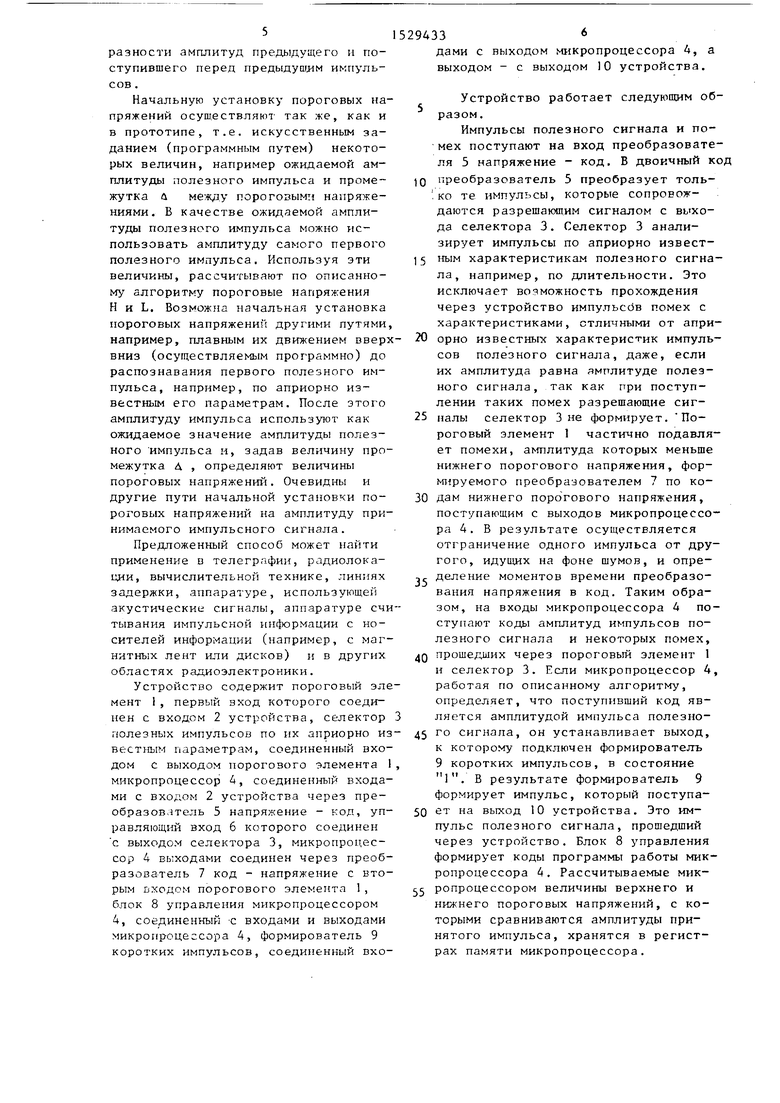
На чертеже приведена схема устройства, реализующего предложенный способ.
Предложеншлй способ можно реализовать на любом известном микропроцессорном селекторе, однако запрограммирован он должен быть по - другому. Предложенным способом селектируют любой инерционно изменяющийся по амплитуде импульсный видеосигнал. Критерий инерционности изменения амплитуды импульсов полезного сигнала используется предложенным способом для отличия импульсов полезного сигнала от импульсов помех. Однако отличительные признаки предложенного способа обусловили достиже- . ние более высокой помехозащищенности. Приняв импульс (полезный или поме- У) рассчитывают по уравнению огибающей вершин предыдущих полезных импульсов (кривой, проходящей на временной диаграмме импульсного сигнала через вершины предыдущих импульсов, проквалифицированных ранее полезными, такая кривая непрерывна во
времени) ожидаемую амплитуду полезного импульса с таким же временем поступления, как и у принятого импульса, т.е. определяют какой был бы по амплитуде полезный импульс, если бы он поступил в момент поступления принятого импульса. Для этого в указанное уравнение огибающей подставляют время поступления принятого импульса. Уравнения кривой, проходящей через точки, координаты которых известны,т .е .через вершины ранее поступивших полезных импульсов,можно составить, используя, например, интерполяционную формулу Лагранжа или другие известные формулы, например, численного гармонического анашиза. Ордината точки огибающей с абсциссой равной времени поступления принятого импульса, является указанной ожидаемой амплитудой полезного импульса. Если принятый импульс является полезным, то его реальная амплитуда отличается от расчетного значения (ожидаемого значения), так как уравнение огибаюшей является приближенным. Величина этой ошибки (разности между расчетным и реальШч м значениями амплитуды полезного импульса) отличается в пределах определенного допуска от ошибки, на которую отличается амплитуда реального предыдущего полезного импульса от его расчетного значения. Объясняется это инерционностью изменения амплитуды полезного сигнала (зызванного, например, инерцион Ностью дгзижения источника сигнала), а, следовательно, и инерционностью изменения ошибки. Определив ожидаемую амплитуду Y полезного импульса, рассчитывают величины пороговых (L - нижний, Н - верхний) напряже1шй, причем L меньше, а Н больше ожидаемого значения Y амплитуды импульса полезного сигнала на величину, пропорциональную разности «L ожидаемого Y и реального А значений амплитуды предыдущего импульса полезного сигнала (последнего распознанного импульса полезного сигнала, поступившего перед принятым иктульсом):
/Y - А7,
Н Y + KJ1 ;
L Y -
где К - коэффициент пропорциональности.Коэффициент пропорциональности (запаса) необходим для того, чтобы исключить подавление полезного импульса, если его ошибка о( больше ошибки oi предыдущего полезного импульса. Сравнивают амплитуду принятого импульса с пороговыми напряжениями Н и L. Если она больше нижнего L ,
но меньше верхнего Н пороговых напряжений, то это полезный импульс (в противном случае это помеха), распознав который, микропроцессор дает команду на формирование выходного
5 импульса, означающего, что принятый импульс является полезным. Это импульс, прошедший через микропроцессорный селектор. Затем с учетом параметров каждого принятого полезного
0 И1 1пульса повторяют все описанные операции при поступлении каясдого последующего импульса,, т.е. составляют уравнение огибающей, рассчитывают пороговые напряжения Н и L, сравни5 вают с ними амплитуду принятого импульса. Для этого, например, принятый импульс предст;.вляют предыдущим, предыдущий - импульсом, поступившим перед предыдушлм и т.д., ве0 личины oi- , Y и А представляют соответственно величинами el , Y и А . Описанная переквалификация величин может быть достигнута также переписыванием в микропроцессорном селекторе этих величин из одного регистра пггмяти в другой. Таким обра- SOM каждый принятый импульс корректирует огибающую вершин полезнь х имггульсов, уменьшая ошибку i оче- .Q редного полезного импуль,а.
Практически оказалось возможным учитывание в уравнении огибающей не всех поступивших ранее полезных им- д5 пульсов, а лишь нескольких последних, например трех последних перед принятым. При этом упрощается математическое описание огибающей за счет некоторого расширения промежутка л между пороговыми напряжениями Н и L, который меньще, чем в прототипе.
Помехозащищенность предложенного способа селекции вьш:е, чем прототи- ., па, так как достигается меньший промежуток д между noporoBbiNH напряжениями Ни., поскольку разность ожидаемого и реального значений амплитуды полезного импульса меньше
5
50
разности амплитуд предыдущего н поступившего перед предьщушлм импульсов .
Начальную установку пороговых напряжений осуществляют так же, как и в прототипе, т.е. искусственным заданием (программным путем) некоторых величин, например ожидаемой амплитуды полезного импульса и промежутка U межд.у пороговыми напряжениями, В качестве ожидаемой амплитуды полезного импульса можно использовать амплитуду самого первого полезного импульса. Используя эти величины, рассчитывают по описанному алгоритму пороговые напряжения Н и L. Возможна начальная установка пороговых напряжений другими путями например, плавным их движением вверх вниз (осуществляемым программно) до распознавания первого полезного импульса, например, по априорно известным его параметрам. После этого амплитуду импульса используют как ожидаемое значение амплитуды полезного импульса и, задав величину промежутка Д , определяют величины пороговых напряжений. Очевидны и другие пути начальной установки пороговых напряжений на амплитуду принимаемого импульсного сигнала.
Предложенный способ может найти применение в телеграфии, радиолокации, вычислительной технике, линмях задержки, аппаратуре, использующей акустические сигналы, аппаратуре счи тывания импульсной ин($юрмации с носителей информации (например, с магнитных лент или дисков) и в других областях радиоэлектроники.
Устройство содержит пороговый эле мент I, первый вход которого соединен с входом 2 устройства, селектор полезных импульсов по их априорно из вестным параметрам, соединенный входом с выходом порогового элемента микропроцессор Д, соединенный входами с входом 2 устройства через преобразователь 5 напряжение - код, управляющий вход 6 которого соединен с выходом селектора 3, микропроцессор 4 выходами соединен через преобразователь 7 код - напряжение с вторым входом порогового элемента 1, блок 8 управления микропроцессором 4, соединенный -с входами и выходами микропроцессора 4, формирователь 9 коротких импульсов, соединенный вхо29433
дами с выходом микропроцессора 4, а выходом - с выходом 10 устройства.
Устройство работает следующим образом.
Импульсы полезного сигнала и помех поступают на вход преобразователя 5 напряжение - код. В двоичный код
)0 преобразователь 5 преобразует толь- ко те импульсы, которые сопровождаются разрешающим сигналом с выхода селектора 3. Селектор 3 анализирует импульсы по априорно извест 5 ным характеристикам полезного сигнала, например, по длительности. Это исключает возможность прохождения через устройство импульсбв помех с характеристиками, отличными от апри20 орно известных характеристик импульсов полезного сигнала, даже, если их амплитуда равна амплитуде полезного сигнала, так как при поступлении таких помех разрешающие сиг25 налы селектор 3 не формирует. Пороговый элемент 1 частично подавляет помехи, амплитуда которых меньше нижнего порогового напряжения, фор- MTipyeMoro преобразователем 7 по ко30 дам нижнего порогового напряжения, поступающим с выходов микропроцессора 4 . В результате осуществляется отграничение одного импульса от другого, идущих на фоне шумов, и опре-
эс деление моментов времени преобразования напряжения в код. Таким образом, на входы микропроцессора 4 поступают коды амплитуд импульсов полезного сигнала и некоторых помех,
Q прошедших через пороговый элемент 1 и селектор 3. Если микропроцессор 4, работая по описанному алгоритму, определяет, что поступивший код яв- ляется амплитудой импульса полезно45 сигнала, он устанавливает выход,
к которому подключен формирователь 9 коротких импульсов, в состояние 1. В результате формирователь 9 формирует импульс, который поступа50 ет на выход 10 устройства. Это импульс полезного сигнала, прошедший через устройство. Блок 8 управления формирует коды программы работы микропроцессора 4. Рассчитываемые мик55 ропроцессором величины верхнего и нижнего пороговых напряжений, с которыми сравниваются амплитуды принятого импульса, хранятся в регистрах памяти микропроцессора.
Формула изобретения
Способ селекции импульсного сигнала, включающий сравнение амплитуды каждого принятого импульса с верх- инм и нижним пороговыми напряжениями, адаптнруюпцпшся расчетным путем к амплитуде полезного сигнала, и выделение импульсов с амплитудой больше инжнего и меньше верхнего пороговых напряжений, отличающийся тем, что, с целью повьипения помехозащищенности, адаптацию пороговых напряжений осуществляют установкой нижнего порогового напряжения мень
ше, а верхнего порогового напряжения больше ожидаемого значения амплитуды полезного импульса, имеющего время или порядковый номер поступления такие же, как и у принятого импульса, на величнну, пропорциональную разности ожидаемого и реального значений амплитуды предыдущего полезного импульса, причем ожидаемое значение амплнтуды полезного импульса рассчитывают, подставляя в уравиение кривой, огибающей вершины прошедших полезных нмпульсов, время или порядковый номер поступления принятого импульса.
Изобретение относится к импульсной технике и может быть использовано при построении селекторов импульсного сигнала с инерционно изменяющейся со временем амплитудой. Целью изобретения является повышение помехозащищенности. Способ реализуется на любом известном микропроцессорном селекторе. Составляют уравнение огибающей вершин поступивших полезных импульсов. Подставляя в это уравнение время или порядковый номер поступления принятого импульса, определяют ожидаемую амплитуду полезного импульса. Адаптацию пороговых напряжений осуществляют установкой нижнего порогового напряжения меньше, а верхнего порогового напряжения больше ожидаемого значения амплитуды полезного импульса на величину, пропорциональную разности ожидаемого и реального значений амплитуды последнего прошедшего полезного импульса. Затем выделяют импульсы с амплитудой больше нижнего и меньше верхнего пороговых напряжений. 1 ил.
f
Редактор Л. Пчолинская
Составитель Н.Маркин
Техред Л.Сердюкова Корректор М.Самборская
Заказ 7759/55
Тираж 88А
ВНИИПИ Государственного комитета по изобретениям и открытиям при ГКНТ СССР 113035, Москва, Ж-35, Раушская наб., д. 4/5
Подписное
| Устройство дня указания расширения станин тепловых машин | 1916 |
|
SU1215A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
