ОБЛАСТЬ ТЕХНИКИ
Изобретения относятся к области радиолокации и радиосвязи с подвижными объектами (ПО). Предложен способ определения координат подвижного объекта в условиях многолучевого распространения радиоволн. Указанный способ может быть применен для определения координат подвижного объекта в условиях города. Предложен также способ идентификации множества абонентов и определения их координат. Также предложено устройство, реализующее оба указанных способа. Под абонентами системы понимаются лица или объекты, располагающие (оснащенные) радиотехническим устройством для передачи радиосообщения на центральную станцию (устройство вызова центральной станции - УВ). Лица, являющиеся конечными получателями информации, поступающей от абонентов, называются пользователями системы. Предполагается, что пользователи системы связаны с центральной станцией (ЦС) линиями связи и могут иметь устройства для отображения поступающей от ЦС информации.
Изобретение имеет следующие области применения:
- Вызов городских экстренных служб (милиция, скорая медицинская помощь, пожарная охрана и пр.) при чрезвычайных ситуациях.
Вызов экстренных служб может производится физическим лицом, транспортным средством, объектом недвижимости. Предполагается, что наличие чрезвычайной ситуации устанавливается по факту срабатывания датчиков, установленных на УВ.
Предполагается также, что датчики могут приводится в действие как вручную, так и автоматически. Например, автомобиль может оснащаться датчиками "взлом", "запуск двигателя без ключа", "буксировка", "пожар", приводимыми в действие автоматически, и кнопкой "паника", приводимой в действие водителем автомобиля в случае нападения.
При срабатывании датчиков в эфир передается сигнал тревоги, содержащий идентификационный код (ИК) абонента и номера сработавших датчиков. На ЦС по идентификационному коду устанавливаются данные абонента, например, если абонент - физическое лицо, то его паспортные данные, если абонент автомобиль - его марка, цвет, номер гос. регистрации, имя владельца, если абонент объект недвижимости - то его адрес и владелец.
Если установлено, что абонент - физическое лицо или транспортное средство, ЦС должна определить координаты абонента. Всю полученную информацию ЦС должна передать соответствующей экстренной службе для реагирования.
- Слежение за подвижными объектами. В этом случае ПО, за которым производится слежение, периодически передает в эфир свой идентификационный код. Одновременно с приемом ИК ЦС должна определять координаты ПО.
Практический интерес представляет слежение за автомобилями. В круг автомобилей, за которыми производится слежение, целесообразно включить патрульные автомобили экстренных служб. В этом случае создаются условия, при которых экстренные службы имеют возможность максимально быстро и эффективно реагировать на поступающие вызовы. Желательно также, чтобы слежение осуществлялось за городским общественным транспортом. При этом под жесткий контроль ставится выполнение графика движения, автоматически определяется объем перевозок и учитывается рабочее время водителей. Кроме того, остановки общественного транспорта могут быть оснащены пейджерами, оповещающими пассажиров о времени прибытия необходимых им маршрутов. Если слежение осуществляется за автомобилями такси, то появляется возможность автоматизированного вызова автомобиля такси клиентом. При этом под жесткий контроль ставится исполнительская дисциплина водителей. Слежение также может производится за любым транспортным средством, владелец которого желает исключить возможность нецелевого использования транспортного средства и в автоматизированном режиме производить контроль дисциплины и учитывать рабочее время водителей.
Если число автомобилей, за которыми осуществляется слежение, составляет значительный процент от общего числа автомобилей в данной местности, появляется принципиальная возможность решения задачи оптимальной организации транспортных потоков (см. п.2).
- Поиск ПО (похищенных автомобилей, лиц с неадекватным поведением, потерявшихся домашних животных). Абоненты передают на ЦС свой ИК при поступлении соответствующей радиокоманды.
Одновременно с приемом сообщения ЦС должна определять координаты ПО.
- Выполнение вспомогательных функций в интересах различных систем радиотелефонной связи.
Радиотелефонная связь между двумя абонентами в реальном масштабе времени может быть организована с максимальной эффективностью в случае, если координаты обоих абонентов известны с высокой степенью точности. Указанные системы радиотелефонной связи могут рассматриваться как внешние по отношению к рассматриваемой системе, причем рассматриваемая система в интересах указанных систем может выполнять вспомогательные функции, а именно функцию поиска абонента и функцию вызова абонентом системы радиотелефонной связи. Предполагается, что, если абонент хочет воспользоваться радиотелефонной связью, он передает в эфир свой ИК и номер заказываемой услуги. ЦС определяет координаты абонента и передает "заявку" на обслуживание радиотелефонной системе связи.
- Существует ряд задач, для решения которых желательно использовать специализированную проводную систему связи абонента с ЦС. К таким задачам прежде всего относится проведение электронных платежей (обслуживание кредитных карточек). В настоящее время для решения этой задачи используются коммутируемые и выделенные телефонные каналы связи. Простые оценки для условий г. Москвы показывают, что, если значительная часть платежей в городе будет проводится с использованием кредитных карточек, то информационной емкости существующей в г. Москве сети телефонной связи (≈107 вызовов в сутки) будет недостаточно. Кроме того, большую долю товарооборота обеспечивают мелкие торговые предприятия, для которых подключение к системе электронных платежей по существующей ныне технологии связано со значительными издержками.
Как будет видно из дальнейшего, реализация предлагаемой в настоящем патенте системы радиосвязи предполагает развертывание сети приемных устройств, которыми оборудуются все или почти все объекты городской недвижимости. Каждое приемное устройство системы связано выделенной телефонной линией с концентратором, установленном на подстанции городской телефонной сети. Выходом концентратора является микроволновая или оптоволоконная линия связи, поступающая на ЦС. Несмотря на значительный поток радиосообщений, принимаемых системой в целом, поток сообщений, поступающих на каждое отдельное приемное устройство, невелик. По этой причине информированная емкость выделенной линии связи используется не полностью. Если приемные устройства имеют разъемы для подключения внешних устройств, то создаются условия, при которых возможно эффективное решение задач, сводящихся к двусторонней связи абонента с ЦС. При этом предполагаемая " параллельная" система телефонной связи имеет значительную информационную емкость и способна существенно "разгрузить" городскую телефонную сеть. Кроме того, существуют простые технические решения, исключающие возможность несанкционированного доступа к указанным линиям связи. Например, при обрыве линии связи может вырабатываться сигнал тревоги, передаваемый экстренным службам для реагирования.
Важным частным случаем применения указанных линий связи является решение задачи "тонкого" регулирования фаз работы светофоров. Для решения этой задачи достаточно связать светофор проводной линией с ближайшим объектом недвижимости, оборудованным приемным устройством системы.
Схематический внешний вид системы радиосвязи абонентов с центральной станцией с идентификацией абонентов и определением их местоположения приведен на фиг. 1. На фиг. 2 приведена функциональная схема устройства. Пояснения к фиг. 1,2 приведены в п.3. На всех фиг. приняты следующие обозначения:
1-7 приемные устройства;
8 выделенная телефонная линия;
9 концентратор;
10 оптоволоконная или микроволновая линия связи;
11 центральная станция;
12 пользователь системы;
13 вертолет, оснащенный передатчиком, предназначенный для определения координат приемных устройств после их развертывания;
14 искусственный спутник земли, оснащенный передатчиком синхронизирующих импульсов;
15 абонент системы - физическое лицо;
16 абонент системы - автомобиль;
17 разъем для подключения к приемному устройству различных внешних устройств;
18 светофор, подключенный к приемному устройству;
19 банкомат, подключенный к приемному устройству;
20 здание;
21-27 волновые фронты;
28 передатчик УВ;
29 микропроцессор УВ (МП);
30 постоянное запоминающее устройство (ПЗУ) УВ;
31 передающая антенна УВ;
32 приемная антенна УВ;
33 усилитель высокой частоты (УВЧ);
34 детектор;
35 видеоусилитель;
36 дифференцирующая цепь;
37 цифроаналоговый преобразователь (ЦАП);
38 аналого-цифровой преобразователь (АЦП);
39 компаратор;
40 схема определения максимального значения;
41 логарифмический усилитель;
42 антенна канала синхронизации;
43 приемник канала синхронизации;
44 генератор тактовых импульсов (ГТИ);
45 счетчик тактовых импульсов;
46 микропроцессор приемного устройства (МП);
47 модем;
48 порт ввода-вывода;
49,50 блоки памяти концентратора;
51 память концентратора;
52 микропроцессор (МП) концентратора;
53 разделительный трансформатор модема, установленного на концентраторе;
54 разделительный трансформатор модема, установленного на приемном устройстве;
55 фазовый компаратор;
56,57 разделительные конденсаторы;
58 стабилитрон;
59 резистор;
60 микропроцессор (МП) спецвычислителя (СВ);
61 центральный процессор (ЦП) спецвычислителя;
62 шина данных;
63 линия прерываний;
64 линия синхронизации;
65 здание, расположенное по адресу: г. Москва, ул. Усиевича, д 10А;
66 здание, расположенное по адресу: г. Москва, ул. Усиевича, д 2.
УРОВЕНЬ ТЕХНИКИ
Прежде чем обсуждать существующий уровень техники, сформулируем технические требования, которые должны предъявляться к системам радиосвязи, предназначенным для решения сформулированных в предыдущем пункте задач. Тем самым будет сформулирован технический результат, требуемый для успешного решения задач, указанных в п.1.
1. Для решения всех заявленных выше задач необходима система с исключительно высокой информационной емкостью, поскольку общее число абонентов и общая интенсивность потока сообщений предполагаются значительными. Для дальнейших оценок будем считать, что на территории города, представляющего собой круг радиуса R = 15 км, одновременно находится ≈2•106 автомобилей, каждый из которых передает ИК один раз в десять секунд, и ≈107 абонентов, использующих УВ для вызова экстренных служб (физические лица, автомобили, взятые под охрану и т.д.), причем каждый из указанных абонентов вызывает экстренные службы в среднем один раз в год, при этом для надежности каждый вызов повторяется 100 раз с интервалом в 1..2 секунды.
2. Координаты ПО должны определяться с точностью не хуже, чем (5-15) м.
Например, при точности определения в (50-100) м в условиях города невозможно достоверно определить, на какой именно улице находится данный ПО или находится ли ПО во дворе или с фасадной стороны здания.
3. Если допустить, что некоторая система радиосвязи используется для охраны значительного числа абонентов, то следует предположить, что злоумышленник, как правило, будет совершать преступные действия под прикрытием дезинформирующих и маскирующих радиопомех. Если система радиосвязи чувствительна к дезинформирующим помехам и не может с приемлемым уровнем точности определять координаты постановщика маскирующих помех, то такая система совершенно не приемлема для практического применения.
Сделаем ряд замечаний:
1. Необходимо обеспечить передачу радиокоманд для ПО. Предполагается, что радиокоманды изменяют период передачи ИК абонентом. Радиокоманды необходимы для реализации режима поиска ПО, а также могут быть полезны в режиме слежения за ПО. Действительно, допустим, что дежурный территориального подразделения экстренных служб "наводит" патрульный автомобиль на точку вызова в реальном масштабе времени, используя "обычные" радиотелефонные каналы связи. При этом предполагается, что в распоряжении диспетчера имеется компьютер, на экране которого показан план соответствующего участка территории, на котором точками показаны патрульный автомобиль и абонент, вызвавший экстренную службу.
Для реализации такого режима желательно, чтобы указанный автомобиль передавал свой ИК хотя бы один раз в секунду, в то время как для слежения в "обычном" режиме вполне достаточно, чтобы автомобиль передавал ИК один раз в десять секунд.
Для передачи радиокоманд могут быть использованы существующие каналы связи. Например, если поиск ПО производится в интересах системы радиотелефонной связи, радиокоманды могут передаваться по каналам радиотелефонной связи, либо для этих целей может быть выделен отдельный частотный диапазон. Оценки показывают, что для города с населением ≈106...107 жителей достаточно одного передатчика.
2.Для решения всех указанных в п.1 задач нет никакой необходимости в передаче сообщений от центральной станции к какому-либо отдельно взятому абоненту, т.е. связь между абонентом и ЦС может быть однонаправленной. Исключением является передача радиокоманд для реализации режима поиска и слежения за ПО. Однако необходимость передачи радиокоманд не является фактором, ограничивающим информационную емкость предлагаемой нами ниже системы. Поэтому далее предполагаем, что передача радиокоманд производится внешними по отношению к предлагаемой системе устройствами. В связи с однонаправленным характером передачи информации от абонента к ЦС остановимся подробней на решении задачи оптимальной организации транспортных потоков.
Допустим, что водитель автомобиля хочет определить оптимальный маршрут движения из одной точки города в другую. Критерием оптимальности может являться, например, максимальная безопасность движения, минимальные транспортные издержки, минимальное время в пути. Если транспортное средство оборудовано компьютером, в память которого внесена карта города и соответствующее программное обеспечение, задача может быть решена. Однако решение этой задачи зависит как от параметров, так и от интенсивности движения и скоростей транспортных потоков в тысячах " узловых" точках города. Если имеется репрезентативная выборка городских автомобилей, местоположение которых отслеживается, например, с периодом в 10 секунд, то указанные параметры могут быть определены с высокой степенью точности. Важно, что полученная информация является общей для всех автомобилей города и не требует "рассылки" по конкретным адресам. Существует множество способов, позволяющих сделать эту информацию доступной любому заинтересованному лицу.
Отметим, что указанная информация может быть также использована для "тонкого" управления фазами работы городских светофоров при условии, что городские светофоры имеют линию связи с ЦС.
Казалось бы, что задачи, сформулированные в п.1 могут быть решены в случае, если для приема сообщений абонентов используется многопозиционная радиолокационная станция (см. / Черняк В. С. Многопозиционная радиолокация.- М.: Радио и связь, 1993.- 416 с./). Однако возникают две серьезные проблемы. Во-первых, определение координат ПО в городе представляет собой сложную задачу из-за особенностей распространения радиоволн. Во-вторых, требуется создать систему радиосвязи, способную обслуживать громадное число абонентов. Далее мы последовательно рассмотрим обе эти проблемы. В качестве аналогов предлагаемого нами способа определения координат мы будем рассматривать гиперболический метод (прототип)- см. / Черняк В. С. Многопозиционная радиолокация. - М.: Радио и связь, 1993.- 416 с./ и патент PCT WO 93/04453 кл. G 08 G 1/127, G 01 S 3/50 1993г. В качестве аналогов способа идентификации абонентов и определения их местоположения будут рассматриваться общеизвестные системы сотовой связи - см. / Связь с подвижными объектами в диапазоне СВЧ. Под ред. У. К. Джейкса. Пер. с англ. М.: M.: Связь, 1979, 520 с./ и упомянутый патент WO 93/04453 (прототип). В качестве прототипа устройства также рассматривается патент WO 93/04453 и в качестве аналога известная спутниковая система определения координат GPS - см. например, патенты PCT/WO 95/08779 кл. G 01 S 5/02, 5/10, 1/02 и WO 94/22032 кл. G 01 S 5/02, 1/16, 13/00/.
2.1 ОПРЕДЕЛЕНИЕ КООРДИНАТ ПО
В настоящее время наиболее точным и распространенным методом определения координат ПО является радиолокация, известная с начала 30-х годов.
Радиолокационные системы разделяются на активные и пассивные в зависимости от наличия передатчика зондирующих импульсов. В активных системах ПО излучает радиоимпульс синхронно с приходом зондирующего импульса. Пассивные системы не имеют передатчика зондирующих импульсов, и ПО излучает радиоимпульсы асинхронно, в заранее неизвестные моменты времени.
В радиолокационных системах для измерения координат используются угловые и дальномерные методы. Далее мы будем рассматривать только дальномерные методы, получившие распространение с начала 70-х годов в многопозиционных радиолокационных станциях (МПРЛС).
В дальномерных МПРЛС для определения координат ПО измеряются времена поступления радиосигнала ПО на несколько пространственно-разнесенных приемных устройств.
В активных системах используется метод, широко известный под названием эллиптического /см. Черняк В. С. Многопозиционная радиолокация.- М.: Радио и связь, 1993.- 416 с./
Активные системы неприемлемы для решения указанных в п.1 задач, поскольку обладают низкой помехоустойчивостью. Действительно, злоумышленник может использовать маломощный передатчик, имитирующий зондирующие импульсы, причем дезинформирующий сигнал может быть сдвинут по фазе по отношению к источнику зондирующих импульсов. УВ охраняемого объекта передаст сигнал тревоги синхронно с поступлением "ложного" импульса, что приведет к невозможности определения координат ПО. Определить координаты постановщика дезинформирующих сигналов невозможно из-за низкой потребной мощности передатчика.
В пассивных системах для определения координат ПО используется "разностно-дальномерный" или "гиперболический" метод. Измеряемыми величинами являются времена поступления сигнала ПО на четыре приемные станции. Из фиг. 3 очевидно, что
где Li - расстояние между ПО и i-ой приемной станцией;
i - номер приемной станции;
c - скорость распространения радиоволн;
ti - время поступления фронта импульса на станцию i,
t0 - момент излучения фронта импульса подвижным объектом;
x, у, z - координаты ПО;
xi, yi, zi - координаты i-ой приемной станции.
Далее по определению считаем c ≡ 1, т.е. время и расстояние измеряются в одинаковых единицах (1 мкс≈300 м).
Идея гиперболического метода состоит в исключении из системы уравнений (1) неизвестного времени t0. Вычтя, например, последнее уравнение из первых трех, получим систему из трех нелинейных уравнений с тремя неизвестными:
Каждое из уравнений (2) представляет собой уравнение гиперболоида. Геометрически решение системы (2) представляет собой точку пересечения 3-х гиперболоидов.
Необходимым условием применения радиолокационных методов является прямая видимость ПО со стороны приемных антенн МПРЛС, поскольку в противном случае сигналы ПО поступают на приемные устройства МПРЛС после отражения от различных местных предметов и не несут полезной информации о координатах ПО. При этом следует создать условия, при которых сигналы, отраженные от местных предметов, не окажут существенного влияния на точность определения времени поступления на приемную антенну фронта прямого луча.
Оба эти условия выполнены для МПЛРС "космического базирования".
В настоящее время такие системы являются единственными реально работающими системами, позволяющими определять координаты ПО в условиях города.
Прямая видимость ПО со стороны приемных антенн обеспечивается за счет расположения ИСЗ в положении, близком к зениту (можно считать, что приемные антенны расположены на бесконечной высоте). При таком способе размещения исключается влияние отраженных сигналов, поскольку отраженные сигналы распространяются в основном под острым углом к горизонту, что видно из фиг. 4, 5.
На этом рисунке показан действительный источник сигнала f и его мнимые изображения f', f'', f''', f(4), построенные по законам геометрической оптики. Для простоты на рисунке показаны лишь отражения первого порядка, т.е. не показаны изображения мнимых источников. Из рисунка видно, что аппертуры мнимых изображений источников ограничены отражающими поверхностями. Например, аппертура источника f'' ограничена поверхностью S (стеной здания 20). Очевидно, что, если ИСЗ находится в зените, со стороны ИСЗ виден лишь действительный источник f и его отражение от земли f'.
Спутниковые системы для определения координат могут требовать наличие у абонента передатчика. В этом случае спутниковые системы имеют низкую информационную емкость. Возможны также спутниковые системы, в которых абонент принимает сигналы от нескольких спутников и определяет свои координаты в пассивном режиме. Казалось бы, что, определив собственные координаты, абонент может передать по "обычным" радиоканалам сообщение, содержащее его координаты. Однако такой способ не приемлем из-за крайне низкой помехоустойчивости. Злоумышленник может иметь компактное маломощное (на уровне микроватт) малогабаритное устройство, ставящее помеху по спутниковым каналам. Поскольку мощность сигнала, поступающего со спутника мала, наличие помехи делает определение координат невозможным. В свою очередь, определение координат постановщика помех невозможно из-за низкой потребной мощности передатчика. Отметим также, что в любом случае необходима система радиосвязи с высокой информационной емкостью. Недостаток спутниковых систем состоит также в том, что сложно сделать оборудование для определения координат с высокой степенью точности малогабаритным, дешевым и надежным.
Кроме того, в реальных спутниковых системах спутники находятся не в зените, а видны под некоторым острым углом к горизонту. Например, в известной спутниковой системе GPS для охвата всей земной поверхности используется 24 созвездия спутников. В этих условиях существуют точки земной поверхности, из которых антенны видны под углами < 30o. Очевидно, что в этих условиях существуют обширные области территории города, в пределах которых отсутствует прямая видимость антенн приемных устройств. В указанных областях определение координат с приемлемым уровнем точности невозможно.
В настоящее время возможность применения МПРЛС с "наземным" расположением антенн для определения координат ПО в условиях города обсуждается лишь на теоретическом уровне в патенте PCT WO 93/04453 кл. G 08 G 1/127, G 01 S 3/50 1993г.
В указанном патенте предлагается система радиосвязи, позволяющая одновременно с приемом сообщения абонента определять его координаты. Предполагается, что на территории города развернута сеть приемопередающих устройств (базовых станций). Станции размещаются по сотовому принципу с характерным расстоянием между станциями порядка одной мили. Антенны устанавливаются на мачтах.
Автор изобретения отдает себе отчет в том, что такой способ размещения антенн не обеспечивает прямой видимости большей части территории города со стороны достаточного числа приемных устройств. Однако, по мнению автора, указанное обстоятельство не является препятствием для определения координат ПО.
Основная идея метода определения координат в указанном патенте состоит в использовании эффекта расширения радиоимпульса по длительности при его распространении в условиях города. По мысли автора, проанализировав форму импульса, поступившего на приемное устройство от ПО, можно определить время поступления сигнала на приемное устройство, которое имело бы место в условиях прямой видимости ПО со стороны приемных устройств.
После того, как сделана поправка к времени фактического поступления сигнала на приемное устройство, предлагается использовать гиперболический метод. Недостаток предложенного в рассматриваемом патенте подхода состоит в том, что среди множества отраженных лучей, распространяющихся по различным "траекториям", отсутствуют лучи, сколь угодно близкие по длине пройденного оптического пути к прямому лучу, что видно из фиг. 6. На этом рисунке показана антенна приемного устройства 1 и два возможных положения ПО - 1 и 2. В положении 1 ПО находится в затененной зоне из-за наличия здания 20. Ослабление прямого сигнала, проходящего через здание, может достигать 100 дб (см., например, / Веденский Б. А. Распространение ультракоротких волн.- М.: Наука, 1973. - с. 138-182. /). "Траектории" отраженных сигналов "огибают" контуры здания 20 и при замене прямого луча на точную нижнюю грань множества длин оптических путей отраженных сигналов будет сделана систематическая ошибка. Более того, допустим, что ПО находится в положение 2. Пусть расстояние между 1 и 2 пренебрежимо мало по сравнению с расстоянием между 1 и приемным устройством, и из точки 2 имеет место прямая видимость приемного устройства. В этих условиях "траектории" отраженных сигналов изменились слабо, зато появилась "траектория" прямого луча. Появление прямого луча приводит к увеличению длительности импульсов. Согласно патенту, большей длительности соответствует большая величина поправки, которую следует вычесть из фактического времени поступления сигнала на станцию, т.е. получаем результат, противоположный очевидному из рассматриваемого рисунка.
Допустим, что рассматриваемая в патенте случайная величина - уширение длительности импульсов для точек, равноудаленных от приемного устройства, имеет статистический разброс в ±20% для уровня вероятности 0,5. Учитывая, что среднее значение увеличения длительности составляет ≈3 мкс, получим характерную величину ошибки определения ti в (±600 нс). В этом случае при приведенных в патенте средних расстояниях между станциями ≈1,6 км средняя ошибка в определении координат ПО превысит 1 км.
По нашему мнению, главный недостаток рассматриваемого патента состоит не в отсутствии адекватного способа определения координат, а в том обстоятельстве, что автор патента не смог предложить способ размещения приемных устройств, обеспечивающий прямую видимость большей части обслуживаемой территории со стороны антенн приемных устройств, что, по нашему мнению, является необходимым условием применения радиолокационных методов для определения координат ПО в условиях города.
Рассмотрим проблемы, возникающие при применении общепризнанных, "классических" методов радиолокации к рассматриваемым нами задачам:
1. Даже в условиях прямой видимости ПО со стороны приемных антенн МПРЛС точное определение положения фронта импульса представляет собой непростую задачу из-за инерционности приемных устройств. Из радиотехники известно приближенное условие, связывающее полосу пропускания приемного устройства Δf с точностью определения положения фронта импульса ΔT: :
Δf×ΔT ≈ 1 (3)
Для точности определения положения фронта импульса в ≈10 нс необходима полоса пропускания в ≈100 МГц. Приемлемым значением несущей частоты является частота в 1 ГГц. Соответственно, получаем ширину полосы пропускания Δf / f = 0,1 при "обычном" значении этой величины 0,01. Применение широкополосных устройств приводит к значительно худшему, чем в "обычных" устройствах, отношению сигнал/шум. Для компенсации указанного обстоятельства необходимо иметь значительную мощность передатчика при небольшом среднем расстоянием между передатчиком и приемными устройствами МПРЛС.
Проведенные нами оценки показывают, что применительно к задачам, поставленным в п.1, приемлемым значением мощности является значение P = 20 Вт при среднем расстоянии между передатчиком и приемным устройством ≈100 м.
2. Приемное устройство, находящееся в зоне прямой видимости ПО, принимает смесь прямого и множества отраженных сигналов. Хотя отраженные сигналы имеют некоторую задержку по отношению к фронту прямого сигнала, невозможно полностью исключить влияния отраженных сигналов на точность определения положения фронта прямого сигнала. Следует учесть также ошибки, связанные с неточной синхронизацией системы. Кроме того, желательно в качестве приемных устройств МПЛРС использовать недорогие цифровые устройства. По нашему мнению, с учетом сделанных выше замечаний, среднеквадратическая ошибка определения времен поступления фронтов прямых сигналов δt находится в пределах
δt = (10-40) нс. (4)
Указанная ошибка с учетом малой величины измеряемых расстояний на практике приводит к невозможности применения гиперболического метода. Часто, при "неудачном" взаимном расположении ПО и приемных устройств система уравнений (2) либо формально не имеет решений, либо дает погрешности в сотни и тысячи метров. Соответствующий пример приведен в п.2.3. Там же изложен найденный нами аналитический метод решения системы уравнений (1). Указанный метод может быть полезен при анализе ошибок гиперболического метода.
Естественным решением является использование большего, чем 4 числа прямых сигналов. Из общих соображений очевидно, что это привело бы к повышению точности и надежности определения координат ПО. Однако в настоящее время не известны естественные обобщения гиперболического и эллиптического метода на число приемных устройств, большее чем 4. Из-за нелинейности указанных методов к ним не применим метод максимального правдоподобия.
3. Существует еще одна серьезная причина, исключающая возможность применения гиперболического метода.
Именно, зона прямой видимости территории со стороны каждого приемного устройства МПРЛС всегда меньше зоны уверенного приема сигналов ПО. По этой причине среди приемных устройств МПРЛС неизбежно будут устройства, принимающие отраженные сигналы в отсутствии прямых. Указанная проблема не может быть решена методами амплитудной селекции, поскольку из-за многолучевого характера распространения радиоволн в городе амплитуда отраженного сигнала может превышать амплитуду прямого. Наличие отраженных сигналов делает невозможным применение гиперболического метода.
Действительно, допустим, что сигнал ПО принят 5-ю приемными устройствами, и пусть даже известно, что 4 устройства приняли прямой сигнал, а одно отраженный.
Временной сдвиг отраженного сигнала по отношению к прямому может достигать 1 мкс / Связь с подвижными объектами в диапазоне СВЧ. Под ред. У. К. Джейкса. Пер. с англ. М.: Связь, 1979, 520 с./, т. е. 300м.
Известные в настоящее время методы определения координат не позволяют определить, какие именно 4 из 5 станций приняли прямой сигнал. Конечно, можно попытаться решить задачу, последовательно применяя гиперболический метод к каждой четверке приемных станций. Однако, такой метод не приведет к желаемому результату даже в случае, если, например, имеется 100 сигналов и известно, что 99 из них прямые. В этом случае можно получить C
Резюмируя сказанное выше, можно утверждать, что решению поставленных в п.1 задач препятствуют следующие обстоятельства:
- В настоящее время не известен способ "наземного" размещения приемных устройств МПРЛС, обеспечивающий прямую видимость территории города со стороны достаточного для определения координат числа приемных устройств;
- В настоящее время не известно обобщение гиперболического метода на число приемных устройств, большее чем 4, что не позволяет определять координаты ПО с достаточной степенью точности и надежности;
- В настоящее время не известен метод, позволяющий определять координаты ПО в случае, если часть сигналов, поступивших от приемных устройств МПРЛС, соответствует прямым лучам, а часть - отраженным.
2.2 РАДИОСВЯЗЬ С ПО
Существенным признаком систем радиосвязи с ПО является способ обеспечения многоканальности системы. Известны следующие методы обеспечения многоканальности системы:
- распределение абонентов по частотным диапазонам;
- разделение абонентов по времени - каждому абоненту выделяются интервалы времени ("временные окна"), в течение которых абонент вправе передавать или принимать сообщения;
- ограничение зоны действия приемопередающих устройств и организация систем связи по сотовому принципу. Суть сотовых систем связи состоит в многократном использовании частотных диапазонов и/или "временных окон", для чего обслуживаемая территория делится на пространственные зоны ("ячейки"), обычно близкие по форме к правильным шестиугольникам. В вершинах шестиугольников устанавливаются приемопередающие устройства ("базовые станции").
Размер пространственной зоны определяется при проектировании системы, исходя из ожидаемого числа абонентов в данной зоне. Обычно размер ячейки составляет от одного до нескольких километров. Предполагается, что сигнал ПО уверено принимается хотя бы одной базовой станцией, обслуживающей данную ячейку, и воспринимается как незначительная помеха базовыми станциями, обслуживающими удаленные от ПО ячейки.
Необходимо отметить, что системы сотовой связи принципиально являются двусторонними, поскольку для обеспечения многоканальности необходима передача информации от каждой базовой станции к абоненту (ПО). Такая информация позволяет абоненту определить ближайшую (в смысле лучшей радиовидимости) базовую станцию, а также определить частотные диапазоны и/или временные окна для информационного обмена - см., например PCT WO 93/04453 стр. 102-107. В защищаемых положениях патента указано, что радиочастотная линия связи между абонентом и базовой станцией включает средства для передачи информации, обеспечивающей многоканальность, от базовой станции к абоненту.
Важно также подчеркнуть, что минимальное расстояние между двумя базовыми станциями, работающими в одном частотном диапазоне и/или в одинаковых "временных окнах", сознательно выбирается при проектировании системы. Соответственно, порог амплитудной селекции каждой базовой станции предопределен при проектировании системы и не меняется в процессе работы. Такой способ выбора порога селекции мы далее будем называть "статическим".
Как было указано выше, для решения поставленных в п.1 задач нет принципиальной необходимости в передаче информации от базовых станций к абонентам. Использование же приемных каналов в УВ для получения информации, обеспечивающей многоканальность, приводит к резкому снижению помехозащищенности, неоправданному усложнению и удорожанию как УВ, так и всей системы в целом.
2.3 АНАЛИТИЧЕСКИЙ МЕТОД РЕШЕНИЯ "ГИПЕРБОЛИЧЕСКОЙ" ЗАДАЧИ И АНАЛИЗ ПОГРЕШНОСТИ ГИПЕРБОЛИЧЕСКОГО МЕТОДА
Обычно для решения системы уравнений (2) п.2.1, или, что то же, для решения равносильной ей системы уравнений (1) (т.е. для определения координат ПО в "разностно-дальномерных" системах) используются численные методы. Ниже будет предложено аналитическое решение "гиперболической" задачи. Преимущество нашего способа состоит в меньших вычислительных издержках, и, что для нас важнее, в простоте получения оценок погрешности.
Рассмотрим фиг. 3. Далее будем предполагать, что приемные устройства не лежат на одной прямой. В этом случае всегда можно выбрать начало координат так, что из 4-х векторов  найдутся хотя бы 3, образующие базис в трехмерном пространстве. 4 вектора в трехмерном пространстве всегда линейно зависимы. Поэтому всегда найдется 4 числа λi , таких, что :
найдутся хотя бы 3, образующие базис в трехмерном пространстве. 4 вектора в трехмерном пространстве всегда линейно зависимы. Поэтому всегда найдется 4 числа λi , таких, что :
Легко показать, что
∑ λi= 0 (2)
тогда и только тогда, когда концы векторов  (т.е. приемные устройства) лежат в одной плоскости ("компланарный" случай). Если концы векторов не лежат в одной плоскости, то будем считать, что величины λi нормированы и
(т.е. приемные устройства) лежат в одной плоскости ("компланарный" случай). Если концы векторов не лежат в одной плоскости, то будем считать, что величины λi нормированы и
∑ λi= 1. (3)
Пусть ПО находится в точке с координатами  . Из фиг. 3 очевидно, что
. Из фиг. 3 очевидно, что
где ti - время поступления фронта импульса на i-ое приемное устройство;
t0 - время излучения фронта сферической волны ПО.
В "компланарном" случае с учетом (2) (4) легко приводится к виду:
0 = ∑ λil
Если
∑ λiti≠ 0 (6)
то из (5) легко получить:
Определив t0 из (7), можно получить координаты ПО. Действительно, поскольку среди 4 векторов  имеется 3, образующие базис, существуют такие наборы чисел γ
имеется 3, образующие базис, существуют такие наборы чисел γ
где  - орты осей.
- орты осей.
Коэффициенты γ
Окончательно получаем систему уравнений:
где Di= (l
Возведя уравнения (9) в квадрат и сложив, получим биквадратное уравнение относительно R. (Если ПО не лежит в плоскости расположения антенн, всегда существует два решения системы (9)). Решив уравнение и подставив полученное значение в (9), получим в явном виде выражение координат через времена ti и коэффициенты линейных комбинаций. Разложив указанные выражения в ряд Тейлора по степеням ti, можно получить в явном виде выражение для оценки погрешности метода.
Рассмотрим конкретный пример.
Пусть приемные устройства расположены в вершинах квадрата и имеют координаты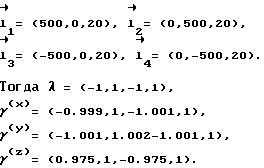
Легко получить:
где δ
δ(x)= (-0.001,0.002,-0.001,-0.001,0,0.001),
δ(y)= (-0.001,0,0.001,0.001,-0.002,0.001)
Применительно к задачам, поставленным в п.1, z-координата ПО не представляет для нас интереса. Далее будем рассматривать наиболее "благоприятный" в смысле наименьшей погрешности в определении координат x, y случай, когда плоскость, в которой расположены приемные устройства, параллельна плоскости возможных местоположений ПО. В этом случае погрешность в определении z-координаты (которая неограниченно возрастает в "критических" областях вблизи любой из 2 вертикальных плоскостей симметрии, проходящих через биссектрисы квадрантов) не влияет на точность определения координат x, y. В указанных областях
∑ λiti _→ 0.
Легко получить следующие простые формулы для оценки погрешности гиперболического метода в пренебрежении членами (dti)2 и меньшими:
где: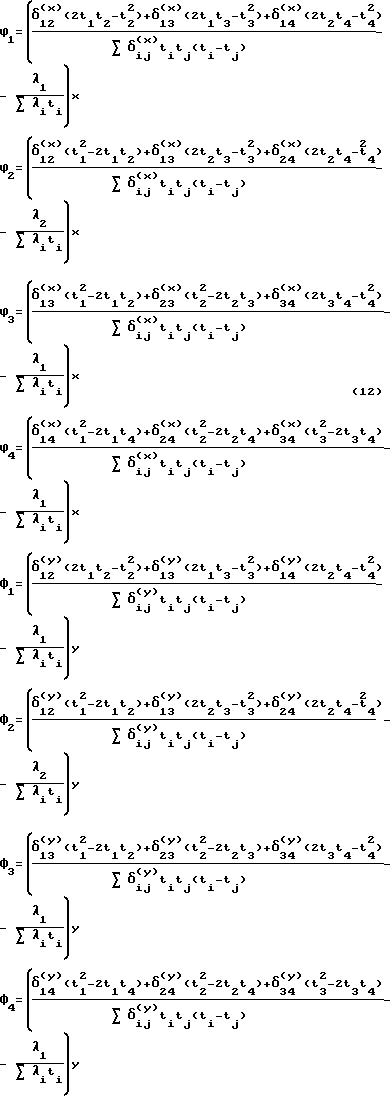
Очевидно, (11) может быть использовано для оценок погрешности в точках непрерывности ϕi,ϕi, , т.е. вдали от областей, для которых ∑ λiti _→ 0. .
Структура уравнений (10) такова, что увеличение (уменьшение) всех ti, i = 1. ..4 на одну и туже величину δt не приводит к изменениям оценок координат. По этой причине мы можем положить t0 = 0 и записать ϕi,φi как функции координат (x, y, z), для чего необходимо сделать в систему уравнений (11) подстановку:
где (xi, yi, zi) - координаты i-то приемного устройства.
Приведенные выше формулы могут быть затабулированы в виде электронной таблицы. Результаты расчета для различных положений ПО приведены на фиг. 7. Все времена и расстояния приведены в метрах, 4-х мерные вектора E_x = (ϕ1,ϕ2,ϕ3,ϕ4), E_y = (φ1,φ2,φ3,φ4) - безразмерные величины. 4-х мерные вектора (dt1, dt2, dt3, dt4) произвольно выбраны из множества псевдослучайных чисел, распределенных по нормальному закону со средним квадратическим отклонением (СКО) 9 м (30•10-9 с).
Из фиг. 7 видно, что при указанном СКО гиперболический метод не приемлем из-за низкой точности определения координат.
В заключение рассмотрим случай общего положения векторов  , при котором приемные устройства не лежат в одной плоскости. В этом случае можно показать, что существуют наборы чисел λi,γ
, при котором приемные устройства не лежат в одной плоскости. В этом случае можно показать, что существуют наборы чисел λi,γ ∑ γ
∑ γ
Соответственно, получаем систему уравнений для определения координат:
Возведя три последних уравнения в квадрат и вычтя их из первого уравнения, получим квадратное уравнение относительно t0. Решив его и подставив полученные решения в (14), определим координаты ПО. В общем случае получим два решения системы (14). Для выбора "правильного" решения следует воспользоваться условием:
t0< ti ∀i = 1...4. (15)
3. СУЩНОСТЬ ИЗОБРЕТЕНИЙ
3.1 ВВЕДЕНИЕ
В самом общем виде работа предлагаемой нами системы выглядит следующим образом:
Пусть имеется подвижный объект (ПО), оснащенный устройством вызова (УВ) центральной станции (ЦС). Пусть в некоторый, заранее неизвестный момент времени в некоторой, заранее неизвестной точке города произошло срабатывание УВ, т. е. УВ передало в эфир свой уникальный идентификационный код (ИК) и информационное сообщение. В свою очередь, в городе развернута сеть приемных устройств, связанных линиями связи с единым для всего города вычислительным центром (т. е. с ЦС). Координаты каждого приемного устройства известны с высокой степенью точности. Каждое приемное устройство определяет амплитуду поступающих радиосообщений и, если эта амплитуда превышает некоторый порог селекции, определяет время поступления радиосообщения. Принятый приемным устройством ИК, время его поступления на приемное устройство, номер приемного устройства, оценка амплитуды сигнала передается на ЦС для последующей идентификации абонента и определения его координат.
Далее информация, поступающая от данного приемного устройства на ЦС, называется отсчетом приемного устройства.
Сеть приемных устройств, связанных с единым вычислительным центром и предназначенная для определения координат ПО, широко известна с начала 70-х годов под названием бистатичной или многопозиционной радиолокационной станции (МПРЛС). Однако ни одна из известных в настоящее время МПРЛС не может быть использована в условиях города из-за особенностей распространения радиоволн.
На наш взгляд, в условиях города единственным адекватным способом размещения антенн МПРЛС является оснащение несколькими антеннами практически каждого объекта городской недвижимости. Способ размещения антенн проиллюстрирован на фиг. 8 и 9, фиг. 9-увеличенный вид верхней угловой точки здания. По-видимому, только при таком способе будут созданы условия, при которых почти каждая точка территории города будет находиться в прямой видимости со стороны достаточного числа приемных устройств. Например, на фиг. 10 приведен план участка территории города Москвы (квартал между улицами Усиевича, Часовой, Черняховского и Асеева). На территории указанного квартала нет ни одной точки в зоне прямой видимости, со стороны которой не находилось бы менее 15-20 точек предполагаемой установки антенн, в чем легко убедиться путем наблюдений на местности. Аналогичная картина имеет место и для других районов г. Москвы. По нашем оценкам, при предложенном способе размещения приемных устройств зона надежного определения координат составляет более 95% территории города.
Вследствие обратимости хода лучей условие хорошей видимости территории со стороны приемных антенн равносильно условию хорошей видимости антенн со стороны любой точки территории. По этой причине указанные антенны разумно назвать "габаритными", т.к. они как бы обозначают габариты зданий. Предполагается, что антенны и связанные с ними приемные устройства размещаются интенсивным методом, т.е. владельцы объектов недвижимости административными мерами обязываются обозначить габариты принадлежащих им зданий приемными устройствами МПРЛС и подключить их к выделенной телефонной линии, связывающей указанные устройства с ЦС. В отношении каждого отдельно взятого приемного устройства (в отличие от систем сотовой связи) не производится никаких проектных работ - не производится оценок предполагаемого числа абонентов в окрестности данного приемного устройства, не определяется его пространственная зона действия и, более того, не производится даже осмотр обслуживаемой территории. Местоположение антенн приемных устройств предопределено конструкцией и местоположением здания. Конечно, при таком подходе не исключено, что некоторые отдельно взятые приемные устройства окажутся "лишними", т.е. за все время существования зданий, на которых они установлены, указанные устройства не примут ни одного "полезного" для нас "прямого" сигнала. Однако из дальнейшего (см. п.3.5) будет видно, что приемные устройства имеют простую конструкцию и низкую стоимость. По этой причине издержки, связанные с установкой и эксплуатацией "лишних" приемных устройств, ниже расходов на проведение проектных работ. Более того, проведение проектных работ требует централизованного вложения средств, в то время как затраты на установку и эксплуатацию приемных устройств легко могут быть отнесены на текущие расходы по эксплуатации здания.
Из изложенного следует, что местоположение приемных антенн предлагаемой нами МПРЛС является предопределенным. Мы не можем, как это имеет место в случае систем сотовой связи, на этапе проектирования определять геометрию и размеры пространственных зон, исходя из ожидаемого числа абонентов в окрестности данной точки территории и необходимого отношения сигнал/шум. Местоположение приемных устройств определяется целым рядом случайных факторов: замыслом архитектора, рельефом местности, конструкцией зданий и пр. Практические измерения, проведенные нами с использованием электронной модели г. Москвы показывают, что с достаточной для практики степенью точности можно использовать следующую математическую модель рассматриваемой МПРЛС:
Плоская проекция (вид сверху) точек местонахождения антенн МПРЛС представляет собой пуансоновское поле точек с плотностью распределения, зависящей от типа городской застройки. Именно, плотность распределения минимальна для "исторической" части городской застройки (характерное расстояние между приемными устройствами ≈30 м) и максимальна для "спальных" районов (≈50 м).
Согласно этой модели предлагаемую нами МПРЛС можно назвать "распределенной", т. к. число приемных устройств, приходящихся на некоторый участок территории города, пропорционально площади этого участка.
Практические наблюдения в условиях г. Москвы показывают, что при предложенном способе размещения антенн МПРЛС при срабатывании УВ в любой точке "исторической" части застройки города будет получено по крайней мере 10 прямых сигналов. При срабатывании УВ в "спальном" районе будет получено не менее 20 прямых сигналов. Однако множество приемных устройств в окрестности сработавшего УВ примут отраженные сигналы, не несущие полезной информации о координатах ПО. В настоящее время неизвестно каких-либо надежных методов, позволяющих отличить прямые сигналы от отраженных на этапе их приема. Действительно, из-за многолучевого характера распространения радиоволн в условиях города амплитуда отраженного сигнала может превышать амплитуду прямого сигнала. Состояние поляризации сигнала, его фаза, крутизна фронта также не являются надежными критериями. Наши оценки показывают, что число отраженных сигналов, проходящих нижний порог амплитудной селекции, может на порядок превосходить число прямых сигналов (см. п.3.4).
Поскольку приемное устройство системы не способно отличить прямой сигнал от отраженного, на ЦС поступает множество отсчетов, лишь меньшая часть которых соответствует прямым лучам. Таким образом, для определения координат ПО необходимо решить следующую задачу:
Пусть на ЦС поступило N отсчетов с одинаковым ИК. Известно, что не менее чем K из них соответствуют прямым лучам, N ≥ K ≥ 5.
1) Следует определить, какие именно отсчеты соответствуют прямым лучам, и 2) предполагая известным закон распределения ошибок измерения времени поступления прямых сигналов, исходя из принципа максимального правдоподобия, получить наиболее достоверную оценку координат ПО.
Метод решения этой задачи изложен в п.3.2 (Способ определения координат ПО). В п.3.3 изложены результаты математического моделирования задач определения координат ПО согласно предложенному нами способу.
Из п.3.3 следует, что изобретение обеспечивает следующий технический результат - координаты ПО определяются в условиях, когда заранее неизвестно, какие именно приемные устройства из множества развернутых принимают прямой сигнал, а какие - отраженный, причем определение координат ПО производится с достаточной точностью для решения задач, указанных в п.1 в условиях, когда в качестве приемных устройств используются устройства, имеющие низкую точность определения времени поступления сигнала.
В п.3.4 (Способ идентификации абонентов и определения их местоположения) изложен разработанный нами способ организации информационного обмена между абонентами и приемными устройствами МПЛРС. Принципиальное отличие предлагаемого нами способа от известных (см. п.2) состоит в способе обеспечения многоканальности системы. Именно, многоканальность системы обеспечивается не передачей какой-либо информации от базовой станции к абоненту и не размещением базовых станций по сотовому принципу (т.е. таким образом, что расстояние между двумя базовыми станциями, работающими в одном частотном диапазоне и/или в одном "временном окне", не ниже заданного, установленного при проектировании системы), а измерением на каждом приемном устройстве амплитуды поступающих сообщений абонентов и динамическим выбором порога селекции - каждое приемное устройство в автономном режиме поддерживает порог селекции на таком уровне, что число сообщений, проходящих порог селекции в единицу времени, равен заданному, установленному для данного приемного устройства командами ЦС. При этом в процессе работы системы указанный поток для каждого приемного устройства уточняется таким образом, что общий поток сообщений, проходящих порог селекции, минимален, а вероятность безошибочного приема сообщения абонента достаточным для определения координат абонента с заданной степенью точности числом приемных устройств, находящихся в зоне прямой видимости со стороны абонента, не ниже заданной. Отметим, что указанная выше вероятность в отличии от известных систем зависит от мощности передатчика абонента - именно она тем выше, чем выше мощность передатчика.
Достигаемый технический результат состоит в обеспечении достаточной для решения указанных в п.1 задач информационной емкости без сознательного выбора точек местоположения приемных устройств и оценки числа абонентов в окрестности каждого приемного устройства при проектировании системы и без передачи какой-либо информации от базовых станций к абонентам, что обеспечивает высокую помехозащищенность.
В п. 3.5 (Система радиосвязи абонентов с центральной станцией с идентификацией абонентов и определением их местоположения) рассмотрен предпочтительный вариант реализации предлагаемой системы. Устройство реализует оба указанных выше способа. Достигаемый технический результат состоит в решении всех поставленных в п.1 задач в полном объеме.
3.2 СПОСОБ ОПРЕДЕЛЕНИЯ КООРДИНАТ ПО
Пусть в точке с координатами x0, y0, z0 в момент времени t0 произошло событие (x0, y0, z0, t0) - излучение фронта сферической радиоволны. В окрестности точки x0, y0, z0 имеется N приемных устройств с известными координатами xi, yi, zi, i = 1-N.
Из указанных N станций не менее, чем K находятся в зоне прямой видимости со стороны x0, y0, z0. По определению введем величины αi , такие, что αi= 1 для прямых сигналов и αi= 0 для отраженных.
"Прямые" станции определяют времена поступления сигналов ti, с ошибками δti, т.е.

где  - теоретическое время поступления сигнала на "прямую" станцию:
- теоретическое время поступления сигнала на "прямую" станцию:
Остальные  станций принимают отраженные сигналы, также с некоторыми ошибками Δti: :
станций принимают отраженные сигналы, также с некоторыми ошибками Δti: :
Далее будем предполагать, что ошибки измерения прямых сигналов не коррелированны и распределены по нормальному закону с одинаковой для всех станций дисперсией σ2. Будем считать также, что математическое ожидание [δti] = 0 и, более того,
(4) является следствием физического принципа однородности времени. Действительно, допустим, что (4) не имеет места, т.е.  Рассмотрим два события, произошедших в одной и той же точке пространства (x, y, z) но в разные моменты времени t0 и t0+δt. Применив к обоим событиям любой логически не противоречивый метод определения координат, получим для этих событий одинаковые оценки пространственных координат и различные оценки для t0, т. к. физические процессы не зависят от выбора начала отсчета временной шкалы. Иначе говоря, синхронное увеличение (уменьшение) всех ti на одну и ту же величину
Рассмотрим два события, произошедших в одной и той же точке пространства (x, y, z) но в разные моменты времени t0 и t0+δt. Применив к обоим событиям любой логически не противоречивый метод определения координат, получим для этих событий одинаковые оценки пространственных координат и различные оценки для t0, т. к. физические процессы не зависят от выбора начала отсчета временной шкалы. Иначе говоря, синхронное увеличение (уменьшение) всех ti на одну и ту же величину  не влияет на точность определения пространственных координат, а приводит лишь к изменению оценки для t0 на величину δt. Однако точное определение t0 не входит в нашу задачу. Очевидно, (4) можно также записать в виде:
не влияет на точность определения пространственных координат, а приводит лишь к изменению оценки для t0 на величину δt. Однако точное определение t0 не входит в нашу задачу. Очевидно, (4) можно также записать в виде:
Для дальнейшего не существенна конкретная форма закона распределения ошибок измерения времени поступление отраженных сигналов Δti. Однако принципиально важно, что ∀i Δti - - положительная величина (при условии, что i-ая станция технически исправна), что будет видно из замечания 2.
Допустим, что коэффициенты αi нам известны. Тогда для оценок неслучайных величин  в формуле (1) можно воспользоваться принципом максимального правдоподобия. Применительно к нашей задаче функция правдоподобия выглядит следующим образом:
в формуле (1) можно воспользоваться принципом максимального правдоподобия. Применительно к нашей задаче функция правдоподобия выглядит следующим образом:
Зафиксировав x, y, z, t0, мы получаем выборку  мерной случайной величины δti. Поскольку среди всех выборок нас интересуют лишь выборки, удовлетворяющие условию (4), функцию правдоподобия можно записать как функцию, зависящую только от пространственных координат:
мерной случайной величины δti. Поскольку среди всех выборок нас интересуют лишь выборки, удовлетворяющие условию (4), функцию правдоподобия можно записать как функцию, зависящую только от пространственных координат:
Из теории вероятностей известно (см., например [7]), что метод максимального правдоподобия сводится к двум условиям - оценкам для математического ожидания и дисперсии случайных величин αi((ti-t0)-Li). Указанные случайные величины, в свою очередь, зависят, как от параметров, от пространственных координат. Наша задача состоит в том, чтобы найти наиболее достоверные оценки для МО указанных величин и соответственно наиболее достоверную оценку для пространственных координат ПО.
Применительно к нашей задаче уравнение для МО следует записать в виде:
что автоматически выполняется в силу условия (4).
Второе условие сводится к тому, что в качестве оценки для дисперсии выбирается значение функции (7) в точке ее глобального минимума или, что тоже, в точке глобального максимума функции (6):
Далее, вместо функции (7) мы будем рассматривать функцию (8), предполагая дисперсию σ2 известной:
Далее функцию (8) мы будем называть функцией правдоподобия
Очевидно, в точке местоположения ПО МО Λ(x0,y0,z0) равно единице. Пусть  координаты точки глобального минимума (8). Очевидно,
координаты точки глобального минимума (8). Очевидно,
Очевидно также, что, выбирая в качестве оценки для (x0, y0, z0)  , мы делаем систематическую ошибку. Нам следует показать, что при достаточно большом числе прямых сигналов указанная оценка является асимптотически несмещенной и сделать оценки для получаемой погрешности. Математически строгое решение этой задачи связано со значительными трудностями и выходит за рамки настоящей работы. Для обоснования указанного предположения мы будем использовать результаты численного моделирования на ЭВМ реальных задач определения координат ПО в условиях города. Полученные результаты подробно рассмотрены в п.3.3, там же приведены грубые эмпирические оценки для получаемой погрешности.
, мы делаем систематическую ошибку. Нам следует показать, что при достаточно большом числе прямых сигналов указанная оценка является асимптотически несмещенной и сделать оценки для получаемой погрешности. Математически строгое решение этой задачи связано со значительными трудностями и выходит за рамки настоящей работы. Для обоснования указанного предположения мы будем использовать результаты численного моделирования на ЭВМ реальных задач определения координат ПО в условиях города. Полученные результаты подробно рассмотрены в п.3.3, там же приведены грубые эмпирические оценки для получаемой погрешности.
Замечание 1. Пусть N=K=4. Тогда для определения координат ПО можно использовать гиперболический метод (система уравнений (2) п.2.1 или эквивалентная ей система уравнений (1) п.2.1). Указанная система уравнений может либо не иметь решений, либо выполняться на некотором конечном или бесконечном множестве точек. Для каждого решения этой системы имеет место
Li - (ti - t0) = 0, i = 1-4 (10)
Или, что равносильно,
Таким образом, при использовании гиперболического метода в качестве оценки координат ПО выбирается точка глобального минимума функции (11) или, что тоже, функции (8). Из сказанного следует, что гиперболический метод является тривиальным частным случаем предлагаемого нами общего метода (при условии, что система уравнения (1) п.2.1 имеет решение).
До настоящего момента мы предполагали коэффициенты αi известными. Далее будет изложен метод, позволяющий определить эти коэффициенты.
Для наглядности дальнейших рассуждений воспользуемся физическим принципом обратимости хода лучей и будем рассматривать задачу, полностью равносильную нашей в смысле получаемых решений.
Далее будем считать, что УВ является приемным устройством, в то время как приемные устройства МПЛРС являются передатчиками. Каждое i-ое "передающее" устройство МПЛРС в момент времени t0 "излучает" сферическую радиоволну, фронт которой в момент времени ti поступает в точку местонахождения ПО. Сказанное иллюстрирует фиг. 11. На этом рисунке показан участок городской территории (вид сверху). Здания 20 оборудованы приемными устройствами 1-7. Волновые фронты 21,22,23,24,25 соответствуют прямым лучам, а 26 и 27 фронт - отраженному. Преимущество такого подхода состоит в том, что, рассматривая некоторую точку пространства, мы не обязаны предполагать, что именно в этой точке находится ПО. (Геометрическая картина распространения радиоволн не зависит от наличия или отсутствия в какой-либо точке приемника.)
Сделаем важное для дальнейшего и очевидное с точки зрения современных физических представлений замечание.
Замечание 2. Путь, проходимый k-ым отраженным сигналом, всегда превышает расстояние между точкой местонахождения УВ и k-ой станцией:
Действительно, в противном случае пришлось бы предположить, что сигнал распространяется со скоростью, превышающей скорость света.
В соответствии со сказанным, УВ всегда находится внутри сферы, образованной фронтом отраженного сигнала, как это и показано на фиг. 11. Из рисунка видно, что времена ti определены с конечной степенью точности - в противном случае фронты прямых лучей пересекались бы в одной точке.
Введем ряд важных для дальнейшего определений.
Для каждой точки с координатами x, y, z рассмотрим N величин:
Назовем величины Φi(x,y,z) = ti-Li невязками.
"Массив" {Φi} можно "отсортировать" в порядке возрастания Φi, т.е. так, что
Φ
Назовем k-ой невязкой невязку, стоящую на k-ом месте в отсортированном массиве {Φi}
Заметим, что, отсортировав массив {Φi} , мы тем самым получаем упорядоченное множество номеров приемных устройств {in}, где на k-ом месте находится номер (нижний индекс в формуле (13)) приемного устройства, давшего k-ую по величине невязку.
Допустим, что нами сделаны какие-либо предположения о величине временной координаты события t0. Тогда назовем величины  условными невязками.
условными невязками.
Массив условных невязок также может быть отсортирован. В дальнейшем наибольший интерес для нас представляет 1-ая (т.е. наименьшая из всех) условная невязка.
Приведенные определения имеют очевидные следствия.
Во-первых, с учетом замечания 2 для физически реализуемых случаев при условии технической исправности приемных устройств в точке местоположения ПО условная невязка не может быть сколь угодно малой отрицательной величиной. В качестве практически работающего критерия будем считать, что в точке местоположения ПО для первой условной невязки имеет место неравенство:
ti-t0-Li> -1.5σ. (15)
Далее будем считать, что станция, для которой в точке местонахождения ПО условие (15) не выполнено либо технически неисправна, либо имеет место некоторый особый случай, который будет рассмотрен позднее. Предлагаемый нами метод позволяет не только определять координаты ПО, но и в процессе решения каждой конкретной задачи проводить тестирование приемных устройств, что крайне важно, поскольку общее число приемных устройств предполагается значительным (≈105 для условий г. Москвы). Далее, вплоть до замечания 3 будем считать, что все приемные устройства исправны и, более того, (15) имеет место.
Далее условные невязки, удовлетворяющие условию
ti - t0 - Li < 0 будем называть отрицательными.
Соответственно, условные невязки, удовлетворяющие условию
ti - t0 - Li > 0
будем называть положительными.
Смысл условия (15) сводится к следующему. Допустим, мы сделали предположение о том, что событие произошло в точке с координатами (x, y, z, t0). Если (15) не имеет места, то предположение о координатах события следует считать ошибочным. В дальнейшем мы будем предполагать, что фронты прямых сигналов попадают в 1.5σ - окрестность точки местонахождения ПО, в то время как фронты отраженных сигналов находятся вне этой окрестности. Более того, в точке местонахождения ПО отраженные сигналы всегда имеют положительную невязку. Если в точке местонахождения ПО некоторый сигнал имеет отрицательную условную невязку, мы обязаны предположить, что этот сигнал соответствует прямому лучу.
Очевидно, что, если (15) имеет место для 1-ой условной невязки, то (15) тем более будет выполнено для условных невязок с большими номерами. В свою очередь, если (15) не имеет места для k-ой условной невязки, то (15) тем более не будет иметь места для k-1-ой и более младших невязок.
Рассмотрим некоторую точку пространства с координатами (х, у, z) и предположим, что ПО находится именно в этой точке. Пусть также известно, что из N поступивших сигналов K соответствуют прямым лучам.
Вычислим N величин Li и N невязок Φi (см. (13)).
Отсортируем массив невязок {Φi}.
Далее из всего N-элементного множества сигналов мы будем рассматривать его K-элементное упорядоченное подмножество {in} где 1 ≤ n ≤ K. Если предположение о том, что ПО находится в точке с координатами (x, у, z) верно, то мы обязаны предположить, что указанные K сигналов соответствуют прямым лучам. Действительно, если массив невязок и массив условных невязок упорядочены, то для любой величины t0 порядок следования номеров приемных устройств { in} в обоих массивах будет одинаков. Если предположение о пространственных координатах ПО верно, то существует такое t0, для которого фронты прямых сигналов попадут в 1.5σ - окрестность. Если сигнал с номером ik находится вне указанной окрестности, то сигналы, стоящие на k + 1 и последующих местах в массиве {ik} тем более находятся вне этой окрестности. Верно также и следующее утверждение: если сигнал с номером ik попадает в указанную окрестность, то в этой же окрестности находятся сигналы, расположенные на предыдущих позициях в массиве {in}, поскольку предполагается, что для рассматриваемой точки выполнено условие (15). В соответствии со сказанным коэффициенты αi могут быть вычислены следующим образом:
Определив коэффициенты αi, из формулы (4а) получаем оценку для t0, а из формулы (8) значение функции правдоподобия. Перебрав, например, с шагом в 1 м все возможные значения координат (x, y, z), мы можем найти точку глобального минимума (8), которую и следует использовать в качестве оценки координат ПО. В п.3.3 будет показано, как по известной величине функции правдоподобия в точке ее минимума определить окрестность, в пределах которой ПО находится с заданным уровнем вероятности.
Очевидно, перебор всех возможных значений координат связан со значительными вычислительными издержками. Задача тем не менее может быть успешно решена, если использовать параллельные вычисления (см. п.3.5.4). Однако объем вычислений может быть сокращен на несколько порядков, если воспользоваться условием (15). Действительно, с учетом (4а) (15) можно записать в виде:
Пусть в некоторой точке (19) не имеет места. Рассмотрим сферу радиуса R с центром в указанной точке. В каждой точке указанной сферы величины Li могут получить приращение не более, чем ±R. Легко показать, что, если (19) не имеет места в некоторой точке, то (19) не может иметь места внутри сферы радиуса
с центром в указанной точке.
Соответствующая область должна быть исключена из рассмотрения.
Существует простой иттерационный метод, позволяющий еще больше снизить вычислительные издержки. Рассмотрим фиг. 11. На этом рисунке показана точка местоположения ПО и 1.5σ - окрестность этой точки. При построении рисунка в качестве оценки для временной координаты события использовано фактическое значение t0. Расположение приемных устройств на этом рисунке (в отличии от фиг. 12) таково, что для любой точки вне 1.5σ - окрестности имеется хотя бы одна отрицательная условная невязка. Выберем в качестве первого приближения произвольную точку с координатами (x, y, z) вне 1.5σ - окрестности ПО. Вычислим для выбранной точки величины Li, невязки ti - Li и отсортируем массив невязок. Рассмотрим первый элемент массива и установим номер станции n соответствующей указанному элементу. Мы не делали никаких предположений о временной координате события, однако можно утверждать, что для "истинного" значения t0 сигнал с номером n имеет в рассматриваемой точке отрицательную условную невязку. Проведем отрезок от рассматриваемой точки к станции n. В качестве следующего приближения выберем точку на указанном отрезке на расстоянии, определяемом формулой (20) от текущего приближения. Очевидно, метод перестает сходится в 1.5σ - окрестности точки местонахождения ПО. В указанной окрестности (если нас не устраивает точность 1.5σ) следует применить прямой метод - перебор по координатам.
Очевидно, метод не работает при расположении приемных устройств, показанном на фиг. 12. На этом рисунке показан участок территории города. Предполагается, что все угловые точки зданий оборудованы приемными устройствами (на фиг. не показаны) и волновые фронты прямых лучей. В заштрихованной области невязки положительны. Подобная геометрия является при предложенном нами способе размещения приемных устройств исключением из общего случая. Применив иттерационный метод в условиях, показанных на этом рисунке, мы быстро попадем в заштрихованную область, после чего метод утратит сходимость.
Мы намерено оставляем в стороне вопрос о строгом обосновании иттерационного метода, поскольку возможно множество различных его модификаций. Однако существенно, что все возможные модификации иттерационного метода, также как и предлагаемый нами метод в целом основан на следующих положениях:
1.В качестве оценки координат ПО используется точка глобального минимума функции (8).
2. Для вычисления величины функции (8) в заданной точке (x, y, z) необходимо выполнить последовательность следующих шагов:
а) по формуле (13) вычислить массив невязок {Φi};
б) отсортировать указанный массив в порядке возрастания величин Φi ;
в) положить αi= 1 для сигналов, отвечающим первым K элементам отсортированного массива и αi= 0 для остальных сигналов;
г) определить t0 из условия (4а) и подставить полученные значения в формулу (8).
З. Если нами сделано предположение о том, что ПО находится в точке с координатами (x, y, z), то в указанной точке 1-ая условная невязка, для которой t0 определяется из условия (4а), не может быть сколь угодно малой отрицательной величиной.
Возможен также и другой подход, состоящий в том, что рассматривая некоторую точку пространства мы не делаем предположения о том, что ПО находится именно в этой точке. Однако, каковы бы ни были на самом деле "истинное" время t0 и "истинные" координаты ПО, в случае, если для рассматриваемой точки имеется хотя бы одна отрицательная невязка (при "истинном" t0 и "истинных" координатах ПО), мы всегда можем установить приемное устройство, дающее для данной точки наиболее отрицательную невязку. Для этого достаточно отсортировать массив невязок для данной точки - первый элемент невязки всегда будет соответствовать приемному устройству, имеющему в рассматриваемой точке наиболее отрицательную невязку. Пример применения этого подхода приведен в п. 3.3.
Замечание 3. До настоящего момента мы предполагали, что в точке местонахождения ПО имеет место (15). Однако на самом деле (15) может не иметь места либо из-за чисто случайных причин (вероятность выполнения (15) в точке местонахождения ПО равна 0.94), либо из-за неисправности приемных устройств. Из-за значительного числа приемных устройств и тяжелых условий их эксплуатации интенсивность потока отказов может оказаться значительной. Желательно, чтобы одновременно с определением координат ПО проводилось тестирование приемных устройств - в этом случае рассматриваемая система будет способна к самоорганизации.
Практические оценки показывают, что число прямых сигналов, поступающих на ЦС при каждом срабатывании УВ, обычно превышает число сигналов, необходимых для определения координат ПО с заданной степенью точности (см. п.3.3). Пусть имеется l "лишних" сигналов (l≈1-3), т.е. для определения координат с заданной степенью точности достаточно K прямых сигналов, в то время как ПО находится в прямой видимости со стороны K + 1 приемных устройств. Очевидно, что изложенный выше метод будет полностью работоспособен, если после каждой сортировки массива невязок мы будем исключать из него не более чем l первых элементов, в случае, если для них не выполнено условие (15). Преимущество такого подхода состоит в том, что мы определим координаты ПО и в случае неисправности некоторого числа приемных устройств.
Определив координаты ПО, мы можем вычислить величины невязок для всех N сигналов, поступивших на станцию, и занести полученные данные в соответствующую базу данных. При статистической обработке указанной базы данных легко могут быть выявлены приемные устройства, "присылающие" на ЦС наименее достоверные отсчеты (см. п.3.4, п.3.5.4).
3.3 РЕЗУЛЬТАТЫ МАТЕМАТИЧЕСКОГО МОДЕЛИРОВАНИЯ И ОЦЕНКА ПОГРЕШНОСТИ СПОСОБА ОПРЕДЕЛЕНИЯ КООРДИНАТ ПО
Математически строгое обоснования изложенного в предыдущем пункте метода определения координат представляет собой сложную задачу, выходящую за рамки настоящей работы. Мы будем ориентироваться на результаты математического моделирования задач определения координат в условиях типичного района города. В качестве такого района нами будет рассматриваться участок территории г. Москвы, прилегающий к ул. Усиевича на участке от дома N 10а до дома N 2. Схематический план участка показан на фиг. 10, 65-ул. Усиевича д N 10а, 66-ул. Усиевича д N 2.
Предполагается, что все дома, показанные на рисунке, оборудованы приемными устройствами МПРЛС согласно способу, изложенному в п.3.1. В этом случае на территории участка имеется 116 приемных устройств. В прямой видимости со стороны каждой точки участка имеется не менее 20 приемных устройств, причем расстояние до наиболее удаленного приемного устройства из указанных 20 не превышает 120 м. Если определение координат производится по 12 или 10 прямым сигналам, расстояние от любой точки территории до наиболее удаленной "прямой" станции не превышает 80 м. (Следует рассматривать только точки в центральной части участка, поскольку для точек на периферии участка существенными оказываются приемные устройства, находящиеся за границами участка).
Для решения задач, поставленных в п.1, z-координата ПО не представляет интереса. Далее будем предполагать известным "рельеф" территории, т.е. высоту каждой точки территории относительно некоторого условного уровня в зависимости от координат x,y:z = ϕ(x,y). Поскольку высота антенны ПО h относительно поверхности земли известна, в качестве оценки координат может быть использована точка глобального минимума функции правдоподобия на поверхности (x,y,ϕ(x,y)+h). Ниже будет показано, что погрешности в определении величины ϕ(x,y)+h слабо влияют на точность определения x, у.
Для рассматриваемого участка поверхность земли может быть аппроксимированна плоскостью z = 0 (приемные устройства имеют отличную от 0 z-координату, см. фиг. 13. Координаты левого нижнего угла фиг. 10 приняты за (0,0)). В столбце 2 таблицы указаны номера станций (приемных устройств), а в столбце 3 их координаты. Символом "d" в столбце 1 таблицы обозначены станции, при вводе указанные как "прямые". Для этих станций к теоретическому значению времени поступления сигнала (столбец 4) прибавлена случайная величина, распределенная по нормальному закону (столбец 5) с М.О.= 0 и СКО = 6.0 м (20 нс) (столбец 6=столбец 4+столбец 5), время поступления сигнала для станций, принимающей отраженные сигналы, увеличено на случайную величину, распределенную равномерно на отрезке (15,150).
Все данные приведены в метрах.
Математическое моделирование проводилось по следующему алгоритму:
1. Выбиралась точка местоположения ПО (x0, y0) в пределах центральной части участка и момент излучения сигнала t0. Выбиралось 20 различных точек. Статистические результаты для всех выбранных точек совпали с точностью ±20%, и далее рассматривается "типичная" точка с координатами (150,150,0).
2. Для каждой выбранной точки определялись приемные устройства, находящиеся в зоне прямой видимости со стороны выбранной точки. Определение координат производилось по K = 20, 12, 10 прямым сигналам;
3. Для всех 116 приемных устройств определялись теоретические времена поступления сигнала  где Li - расстояние между i-ым приемным устройством и ПО;
где Li - расстояние между i-ым приемным устройством и ПО;
4. Для приемных устройств, находящихся в зоне прямой видимости со стороны ПО, вычисленные величины  увеличивались на случайные величины
увеличивались на случайные величины  распределенные по нормальному закону с математическим ожиданием (МО), равным 0, и заданной величиной среднеквадратического отклонения (СКО). Рассматривались СКО от 10•10-9 с до 100•10-9 с (от 3 до 30 м). Для устройств, находящихся вне зоны прямой видимости со стороны ПО,
распределенные по нормальному закону с математическим ожиданием (МО), равным 0, и заданной величиной среднеквадратического отклонения (СКО). Рассматривались СКО от 10•10-9 с до 100•10-9 с (от 3 до 30 м). Для устройств, находящихся вне зоны прямой видимости со стороны ПО,  увеличивались на случайные величины Δti, распределенные по закону равномерной плотности на отрезке [15,150].
увеличивались на случайные величины Δti, распределенные по закону равномерной плотности на отрезке [15,150].
5. Производилась сортировка всех полученных ti в порядке их возрастания. Определялся минимальный элемент tmin и исключались из дальнейшего рассмотрения сигналы, для которых ti - tmin > Rmax•Rmax выбиралось с таким расчетом, чтобы, с одной стороны, миниминизировать число обрабатываемых сигналов, и, с другой стороны, не исключить из дальнейшего рассмотрения ни одного из K прямых сигналов. Для K = 20 выбиралось Rmax = 180 м и общее число обрабатываемых сигналов N составляло N = 30-70. Для K = 10,12 Rmax = 120 м и N = 15-30. Был рассмотрен также частный случай N = K = 20.
6. Согласно способу, изложенному в п.3.2, определялись величины функции правдоподобия в "узловых" точках с координатами x = jΔ, y = kΔ z = 0 где j, k = 0...100, Δ = 3 м. В качестве оценки координат ПО  выбиралась точка, в которой функция правдоподобия принимала наименьшее значение. Для оценки влияния погрешности определения ϕ(x,y)+h на величину погрешности определения координат поиск минимума проводился также на плоскостях z = 10 м и z = -10 м.
выбиралась точка, в которой функция правдоподобия принимала наименьшее значение. Для оценки влияния погрешности определения ϕ(x,y)+h на величину погрешности определения координат поиск минимума проводился также на плоскостях z = 10 м и z = -10 м.
7. Для каждой выбранной согласно п.1 точки не менее 1000 раз выполнялись пп. 4,5,6. На основе решенных задач строились гистрограммы распределения ошибки 
Рассмотрим основные полученные результаты.
Для N = K = 20, x0 = 150 м, y0 = 150 м, z = 0 м и СКО=100 нс (!), СКО=50 нс результаты приведены на фиг. 14 и 15.
Для K = 20, Rmax = 180 м (N = 30-70), тех же координатах ПО и СКО=50 нс результаты приведены на фиг. 16. Из рисунка видно, что наличие "лишних" сигналов снижает точность определения координат. Приемлемая точность обеспечивается при СКО≤ 30 нс - см. фиг. 17 и 18.
Для K = 12, Rmax = 120 м (N = 15-30), СКО=20 нс, СКО=15 нс результаты приведены на фиг. 19 и 20.
На фиг. 21, 22 приведены результаты для K = 10, Rmax = 120 м (N = 15-30), СКО=15 нс, СКО=10 нс.
На фиг. 23,24 приведены результаты решения задачи в случае, когда решение искалось на плоскостях z = 10 и z = -10 (ПО находилось в точке с координатами x = 150, y = 150, z = 0) Rmax = 120 м, K = 10, N = 15-30. Из рисунков видно, что неточность в определении z - координаты слабо влияет на точность определения координат x и y.
На фиг. 25 приведены результаты для K = 10 и N = 116 (сортировка не проводилась) для СКО=10 нс.
Помимо "прямого" метода определение координат производилось также иттерационным методом. Алгоритм совпадал с приведенным выше за исключением п. 6. Применительно к иттерационному способу п.6 формулируется следующим образом:
6а. Произвольным образом выбиралось первое приближение (в том числе в качестве первого приближения выбирались точки, отстоящие на десятки километров от точки местонахождения ПО);
6б. Для каждого очередного приближения производилось вычисление массива невязок и его сортировка. Согласно 4а п. 3.2 вычислялась оценка для t0 (причем αi= 1 для первых K элементов отсортированного массива невязок). Следующее приближение выбиралось на расстоянии Δ = 3 м от предыдущего в направлении станции, давшей наименьшую (т.е. наиболее отрицательную) невязку.
6в. Текущее приближение выбиралось в качестве оценки координат ПО в случае, если оценка для t0 следующего приближения оказывалось ниже, чем у текущего.
Результаты для K = 10, Rmax = 120, x = 150, y = 150, z = 0 приведены на фиг. 26.
На фиг. 27 показана типичная зона возможных местоположений ПО для некоторой выборки случайных параметров δti,Δtj. Для указанной выборки был найден минимум функции правдоподобия. Легко показать, что в точке местонахождения ПО величина функции правдоподобия распределена по закону  где n = K- 1, a χ2 известное хи-квадрат распределение. С вероятностью 0.99 указанная величина не превышает 2.4. Соответственно, для данной выборки случайных параметров с вероятностью 0.99 ПО находится в показанной на рисунке области.
где n = K- 1, a χ2 известное хи-квадрат распределение. С вероятностью 0.99 указанная величина не превышает 2.4. Соответственно, для данной выборки случайных параметров с вероятностью 0.99 ПО находится в показанной на рисунке области.
Из приведенных результатов следует, что приемлемая точность определения координат при не очень жестких требованиях к точности определения ti для прямых сигналов достигается при K = 10 и СКО = 15-20 нс. Очевидно также, что для обеспечения максимальной точности определения координат следует по возможности исключать из рассмотрения "лишние" сигналы, для чего в процессе работы системы следует уточнять для каждого приемного устройства радиус его "зоны ответственности" (см. п.3.4, п.3.5.4).
3.4 СПОСОБ ИДЕНТИФИКАЦИИ АБОНЕНТОВ И ОПРЕДЕЛЕНИЯ ИХ МЕСТОПОЛОЖЕНИЯ
В настоящем пункте нами рассматривается способ организации информационного обмена между абонентом и приемными устройствами системы.
Сделаем ряд замечаний.
1. Для решения всех поставленных в п.1 задач достаточно, чтобы объем сообщения, передаваемого абонентом при каждом вызове ЦС составлял ≈100 бит (8-12 байт).
Действительно, для решения задач слежения за ПО и поиска ПО необходимо передать в эфир только идентификационный код абонента. В режиме вызова абонентом экстренных служб или радиотелефонных систем связи помимо ИК в эфир передается номер вызываемой экстренной службы, номера сработавших датчиков УВ, номер заказываемой у радиотелефонной системы связи услуги (см. п.1), т. е. также незначительный (в пределах 1-2 байт) объем информации.
Для нас представляют интерес сигналы (сообщения) лишь от УВ, находящегося в зоне прямой видимости приемного устройства МПЛРС. Кроме того, расстояние между приемным устройством и УВ невелико и обычно не превышает 300 м. В этих условиях для передачи сообщения объемом в 100 бит достаточно 200•10-6 с. Действительно, основным фактором, ограничивающим скорость передачи данных в условиях города, является межсимвольная интерференция. Причина этого явления состоит в увеличении длительности импульса из-за многолучевого распространения. Если, например, вслед за единичным битом передается нулевой бит, то нулевой бит будет приниматься на фоне "хвоста" единичного бита, см. фиг. 28, 29. На фиг. 28 показана огибающая исходного импульса, а на фиг. 29 - характерная форма импульса после его распространения в условиях города. (Масштаб по вертикальной оси не показан, поскольку для нас представляет интерес форма сигнала, а не значение его амплитуды. Тоже относится и ко всем последующим эпюрам). При высокой скорости передачи данных существует вероятность распознать нулевой бит как единичный.
Пусть расстояние между УВ и приемным устройством составляет 300 м. Время, выделенное на передачу одного бита, составляет 2•10-6 с. Межсимвольная интерференция будет возможна при условии, что амплитуда эхо-сигнала, задержанного на 2 мкс, по отношению к фронту прямого сигнала будет велика. Указанный эхо-сигнал может рассматриваться как сигнал от некоторого фиктивного источника, имеющего мощность, равную мощности действительного источника и расположенного от приемного устройства на расстоянии 900 м. Ниже будет показано, что при самых неблагоприятных условиях амплитуда сигнала фиктивного источника будет более чем втрое ниже амплитуды действительного источника. Из дальнейшего будет видно, что амплитуда поступающих на приемное устройство сигналов некоторым образом измеряется. В этих условиях возможность ошибки при приеме данных из-за межсимвольной интерференции исключена.
Каждый единичный бит в сообщение абонента представляет собой волновой цуг (см. п.3.5). Поскольку даже при скорости ПО в 150 км/ч за время передачи сообщения 200•10-6 с перемещение ПО составляет ≈ 8 мм, т.е. малую величину по сравнению с длинной волны используемого излучения, то условия передачи как первого, так и всех последующих бит сообщения одинаковы. Соответственно, одинаковы форма и амплитуда всех единичных импульсов сообщения.
2. Далее под коэффициентом готовности мы будем понимать вероятность безошибочного приема сообщения абонента достаточным для определения координат с заданной степенью точности числом приемных устройств МПРЛС. Абонентов системы можно разделить на группы.
Далее к первой группе будем относить абонентов, дающих по совокупности низкую интенсивность потока сообщений и предъявляющих повышенные требования к коэффициенту готовности системы (≈ 0.99). К этой группе, например, относятся абоненты, вызывающие экстренные службы.
Ко второй группе будем относить абонентов, дающих значительный поток заведомо избыточных сообщений и предъявляющих невысокие требования к коэффициенту готовности (≈ 0.80-0.90). К таким абонентам прежде всего относятся автомобили, за которыми осуществляется слежение с целью оптимальной организации дорожного движения.
Будем предполагать, что все абоненты в пределах одной группы имеют передатчики с одинаковой мощностью.
3. Для определенности все дальнейшие оценки будут сделаны для города, территория которого представляет собой круг радиуса R = 15 км. Будем предполагать, что на территории города имеется ≈107 абонентов первой группы, совокупная интенсивность потока сообщений которых составляет ≈ 30 с-1, и ≈ 2•106 абонентов второй группы, дающих интенсивность потока сообщений на уровне 2•105 с-1 (см. п.1, замечание 1). Будем считать также, что поток сообщений представляет собой стационарный пуансоновский поток. Предположения о распределении пространственных координат абонентов будут сделаны позднее.
4. Далее будем предполагать, что все УВ (и, соответственно, все приемные устройства МПЛРС) работают в одном частотном диапазоне.
Выше (см. п. 3.1) нами был предложен способ размещения приемных антенн МПЛРС. Такой способ был нами выбран вынуждено, поскольку при конечной высоте антенн только такой способ обеспечивает прямую видимость большей (≈ 95%) части территории города со стороны достаточного для определения координат ПО числа приемных устройств.
Однако оказывается, что предложенный нами способ размещения приемных антенн МПЛРС приводит к исключительно простому и эффективному способу организации информационного обмена между абонентом и ЦС.
Именно, нет необходимости в разделении абонентов по частотным диапазонам и/или "временным окнам". Абоненты системы могут передавать сообщения асинхронно, в произвольные моменты времени, при этом коэффициент готовности остается в заданных пределах.
Сделаем ряд важных определений.
Пусть, исходя из соображений, изложенных в п.3.3 нами выбрано минимально необходимое для определения координат ПО число прямых сигналов K. Пусть вероятность безошибочного приема сообщения абонента каждым приемным устройством равна P и вероятность безошибочного приема сообщения абонента одновременно K устройствами PK меньше требуемого коэффициента готовности. Тогда будем считать, что созданы условия, при которых абонент находится в зоне прямой видимости со стороны K' > K приемных устройств. K' выбирается с некоторым запасом, т.е., например, если для определения координат с заданным уровнем точности достаточно K = 10 прямых сигналов, выбираем K' = 12. Очевидно, при таком подходе потеря сообщения абонента на некоторых отдельно взятых приемных устройствах не приводит к невозможности определения координат абонента. Подробные оценки будут сделаны нами ниже.
Пусть абонент системы находится в точке с координатами (x, y, z). Рассмотрим множество всех приемных устройств МПРЛС, находящихся в зоне прямой видимости со стороны указанной точки. Вычислим расстояния Li между указанной точкой и каждым из приемных устройств указанного множества. Отсортируем полученный массив и рассмотрим первые K' его наименьших элементов.
Назовем величину RK′= L
Очевидно, радиус виртуальной зоны не является непрерывной величиной. Малые изменения координат могут приводить к скачкообразному увеличению (уменьшению) радиуса виртуальной зоны. Типичное значение этой величины определяется типом городской застройки. Например, для рассмотренного нами в п. 3.3 примера (см. фиг. 10) в точке (150,150,0) имеем:
R8 = 56 м, R10 = 63 м, R12 = 109 м, R16 = 118 м, R20 = 129 м.
Назовем виртуальной зоной область пространства, заключенную внутри сферы радиуса RK′ с центром в точке местоположения абонента.
Если сравнивать нашу систему с общеизвестными системами сотовой связи, то виртуальную зону можно рассматривать в качестве аналога ячейки сотовой связи.
Для каждого приемного устройства МПРЛС может быть построена область точек, для каждой из которых указанное приемное устройство входит в K' - элементное множество ближайших к рассматриваемой точке приемных устройств, находящихся в зоне прямой видимости со стороны этой точки.
Назовем зоной ответственности i-ого приемного устройства множество точек пространства (x, у, z), таких, что, во-первых, указанное приемное устройство находится в зоне прямой видимости со стороны указанной точки и, во-вторых, расстояние Li между указанным приемным устройством и указанной точкой не превышает радиуса виртуальной зоны RК′ вычисленного для рассматриваемой точки.
Очевидно, идеальной являлась бы ситуация, при которой сообщения, поступающие на приемное устройство из его зоны ответственности, передавались бы на ЦС, а сообщения, поступающие от абонентов, находящихся вне этой зоны, игнорировались. Однако не существует какого-либо разумного способа, позволяющего решить такую задачу. По этой причине мы вынуждены мирится с тем, что приемное устройство принимает и передает на ЦС не только "полезные" сигналы из зоны ответственности, но также значительное число "лишних" сигналов.
Далее будем предполагать, что каждое приемное устройство некоторым образом оценивает амплитуду поступающих сигналов и передает на ЦС лишь сигналы, амплитуда которых превышает некоторый порог. При распространения радиоволн в условиях города происходит искажение формы импульса. По этой причине возникает неоднозначность при определении значения амплитуды. Типичные формы огибающих показаны на фиг. 30 - 33, фиг. 30 - огибающая исходного сигнала, фиг. 31 - 33 огибающие сигналов, принятых в разных точках города на одинаковом расстоянии от передатчика. На фиг. 31 - 33 показан также некоторый порог селекции U-. Из рисунка видно, что из-за интерференции множества случайных отраженных сигналов может происходить увеличение максимальной амплитуды импульса.
Ранее (см. п.2.1) отмечалось, что для реализации настоящего изобретения необходимо создать условия, при которых было бы возможным точное определение положения фронта прямого луча. К таким условиям относится применение широкополосных приемных устройств и использование передатчиков с избыточной мощностью. Фронт импульса представляет собой векторную сумму двух сигналов - прямого и отраженного от земли, что и приводит к закону ≈1 /r2 (формула Веденского) и к "лепестковой" диаграмме направленности передающей антенны (см. / Грудинская Г. П. Распространение радиоволн, -2-е изд., перераб. и доп. -М. : Высшая школа, 1975.- 236 с./). Диаграмма направленности передающей антенны, установленной на высоте 3 длин волн над поверхностью диэлектрика показана на фиг. 34. Принципиально важно, что фронт "прямого" импульса не подвержен замираниям, если только на расстоянии 3-5 м от абонента отсутствуют отражающие поверхности (кроме земли), поскольку в этом случае отраженные от местных предметов сигналы имеют большую, чем длительность фронта (<10 нс) задержку. Из сказанного следует простой способ оценки амплитуды сигнала - для оценки амплитуды сигнала следует анализировать фронт импульса.
Рассмотрим фиг. 35. На рисунке показан колебательный контур LCR, детектор D и дифференцирующая цепь R1C1.
Пусть в момент времени t = 0 к антенне колебательного контура (точка 1) прикладывается напряжение U = U0sin(ωt), показанное на фиг. 36. Амплитуда напряжения на конденсаторе контура (точка 2) растет по закону (1-exp(-t•ω/(2•Q)))•Q•U0, где Q - добротность. Напряжение в точке 2 показано на фиг. 37. Можно показать, что, если используется квадратичный детектор, максимальное значение производной видеосигнала по времени пропорционально величине U
Для применения рассматриваемого метода необходимо обеспечить высокую скорость нарастания амплитуды сигнала на выходе передатчика (см. фиг. 39,40). Для точного определения времени поступления сигнала на приемное устройство желательно иметь низкое значение добротности колебательного контура. Например, при Q = 10 максимальное значение амплитуды достигается приблизительно через 3 периода несущей частоты. Соответственно, необходимо обеспечить значительную мощность передатчика при малом среднем расстоянии между передатчиком и приемным устройством, чтобы энергия, передаваемая в течение 3-х периодов, была достаточной для устойчивой работы приемного устройства.
Если проводить селекцию импульсов по максимальному значению производной, миниминизируются эффекты, связанные с многолучевым распространением, в частности, если для оценки амплитуды сигнала использовать ее максимальное значение, импульс на фиг. 32 проходит порог селекции U- из-за "шапки", образовавшейся в результате сложения множества отраженных сигналов, по случайным причинам имеющих близкие фазы. Вероятность того, что "шапка" будет иметь участок с высокой крутизной (импульс на фиг. 33), мала, поскольку в этом случае отраженные сигналы, образующие "шапку", должны быть не просто сфазированы, но поступить на приемное устройство одновременно. Если в качестве порога селекции использовать не величину амплитуды, а величину производной амплитуды по времени, импульс на фиг. 32 не пройдет порога селекции.
Изложенный подход имеет еще одно серьезное преимущество. Допустим, что на вход приемного устройства одновременно поступает "полезный" сигнал с крутым фронтом и помеха, имеющая медленно меняющуюся комплексную амплитуду. К такой помехе относится, например, любой ЧМ сигнал со стандартной шириной полосы (≈0.01). Можно показать, что при использовании изложенного метода селекции импульсов и оценки амплитуды, наличие такой помехи приводит лишь к малым ошибкам в оценке амплитуды полезного сигнала. Соответственно, фактическая полоса частот, выделенная системе, может быть уже полосы пропускания приемных устройств. Если в полосу пропускания приемных устройств попадают узкополосные радиоканалы, это не приводит к нарушениям в работе системы.
Кроме того, изложенный метод обеспечивает высокий уровень помехозащищенности. Действительно, в качестве маскирующей помехи не может быть использована не модулированная несущая. Если же несущая промодулирована высокочастотным сигналом, то координаты постановщика помехи могут быть определены с высокой степенью точности (при условии, что приемные устройства и ЦС имеют соответствующее программное обеспечение).
Из сказанного следует, что если бы диаграммы направленности приемной и передающей антенны были бы сферическими, то при предложенном способе оценки амплитуды можно было бы утверждать, что амплитуда "прямого" сигнала убывает по мере удаления абонента от приемного устройства по закону ≈ 1 / r2, где r - расстояние между абонентом и приемным устройством.
Реально диаграммы направленности приемной и передающей антенны отличны от сферических. Кроме того, существует некоторая незначительная вероятность того, что отраженные сигналы от абонента, находящегося вне зоны прямой видимости со стороны рассматриваемого приемного устройства, распространяющиеся по различным "мультидорожкам", поступят на приемное устройство одновременно, что приведет к увеличению амплитуды сигнала. По этим причинам далее будем рассматривать следующую модель: если абонент находится в зоне ответственности приемного устройства, то амплитуда его сигнала зависит от расстояния как const / r2, если же абонент находится вне зоны ответственности, то сигнал такого абонента убывает по закону s х const/r2, где s>1. Иначе говоря, мы рассматриваем худший вариант - сигналы из зоны ответственности "попадают" в минимум диаграммы направленности, в то время как "лишние" сигналы получают дополнительное усиление в s раз.
Оценки показывают, что s<3. Соответственно, в точке, удаленной от передатчика на расстояние 3 х R, мы имеем в по крайней мере в трое более низкую амплитуду, чем на расстоянии R от передатчика.
Далее величину 3 х Rmax, где Rmax - расстояние между рассматриваемым приемным устройством и максимально удаленной от него точкой зоны ответственности, будем называть радиусом зоны конфликта. Соответственно, область пространства, находящуюся внутри сферы радиусом 3 х Rmax с центром в точке местоположения антенны приемного устройства, будем называть зоной конфликта.
Число отсчетов, которые могут быть переданы на ЦС в единицу времени, ограничено пропускной способностью линии связи, связывающей приемное устройство с ЦС. Если для связи с ЦС используется выделенная телефонная линия связи (см. п. 3.5), скорость передачи данных ограничена на уровне 64 Кбит/с. Зарезервируем 50% пропускной способности линии для решения задач, указанных в п. 1 - обеспечения эффективной двусторонней проводной связи между внешними устройствами, подключенными к приемным устройствам и ЦС. Тогда при длительности сообщения абонента в 100 бит каждое приемное устройство может передавать на ЦС≈300 отсчетов/с. Из дальнейшего будет видно, что такой поток отсчетов превышает реально необходимый, вычисленный, исходя из оценок максимально возможного числа абонентов в окрестности приемного устройства.
Допустим, что порог селекции установлен таким образом, что приемное устройство каждую секунду отсылает на ЦС ровно 300 отсчетов. Очевидно, эти отсчеты будут соответствовать сигналам, имеющим максимальную амплитуду среди множества всех сигналов, поступивших на приемное устройство.
Рассмотрим вначале вариант, когда в зону ответственности приемного устройства попадает участок транспортной магистрали с предельно высокой интенсивностью движения - см. фиг. 41. Допустим, что приемные устройства равномерно расположены вдоль указанной магистрали с интервалом в 50 м. Пренебрежем шириной магистрали, высотой антенн приемных устройств, а также потоком сообщений, поступающих от абонентов, находящихся вне пределов магистрали. Допустим также, что для определения координат ПО достаточно 12 прямых сигналов. В этих условиях для любой точки магистрали R12< 150 м и в зону ответственности каждого приемного устройства попадает 300 м магистрали (на рисунке двойной штриховкой показана зона ответственности приемного устройства 1). Пусть движение на магистрали происходит в 6 рядов в каждом направлении и на каждый автомобиль приходится 10 погонных метров ряда - тогда линейная плотность автомобилей составляет 1200 км-1. Если каждый автомобиль на рассматриваемой магистрали оснащен УВ и передает ИК один раз в десять секунд, то в рамках нашей модели следует считать, что приемное устройство 1 принимает сигналы от всех автомобилей, попадающих в область длинной в 2500 м (указанная область содержит 3000 автомобилей). Рассмотрим границу указанной области. Сравним амплитуды сигналов, поступающих от автомобиля, находящегося на границе зоны ответственности приемного устройства 1 (точка 2) и автомобиля, находящегося на границе области. Отношение амплитуд сигналов равно  соответственно, сигналы от абонентов вне рассматриваемой области не могут "вытеснить" сигналы из зоны ответственности приемного устройства. Сигналы абонентов, попадающих в зону ответственности приемного устройства, заведомо войдут в число сигналов, проходящих порог селекции приемного устройства.
соответственно, сигналы от абонентов вне рассматриваемой области не могут "вытеснить" сигналы из зоны ответственности приемного устройства. Сигналы абонентов, попадающих в зону ответственности приемного устройства, заведомо войдут в число сигналов, проходящих порог селекции приемного устройства.
Очевидно, что, если мы примем сообщения всех абонентов, находящихся в зоне конфликта, т.е. удаленных от рассматриваемого приемного устройства на расстояние не более, чем 450 м (ординарная штриховка), мы заведомо не потеряем сообщений абонентов из зоны ответственности приемного устройства 1, поскольку амплитуда сообщения абонента, находящегося на границе зоны ответственности (точка 2) по крайней мере в трое превышает амплитуду сообщения абонента, находящегося на границе зоны конфликта (точка 3). На участке магистрали длинной 900 м находится не более 1080 автомобилей, передающих в среднем 108 сообщений в секунду. Если приемное устройство из множества всех сигналов, поступающих на его вход ежесекундно, будет отбирать 108, имеющих максимальную амплитуду, то в число отобранных сигналов заведомо войдут сигналы, приходящие из зоны его ответственности. (Из зоны ответственности поступает в среднем 36 сигналов.)
Аналогичные оценки можно провести также для приемного устройства, удаленного от оживленных транспортных магистралей. Оценки проведем для рассмотренного в п. 3.3 примера, см. фиг. 10. Для каждой точки показанного на этом рисунке участка территории города имеет место неравенство R12 < 120 м. Соответственно, "радиус" зоны ответственности для каждого приемного устройства не превышает 120 м. Если считать, что 2•106 автомобилей распределены по территории города как пуансоновское поле точек, то в зону ответственности каждого приемного устройства попадает в среднем ≈ 120 автомобилей. В зону конфликта попадает в среднем ≈ 1000 автомобилей, т.е. необходимо передавать на ЦС≈100 отсчетов/с.
Аналогичная оценка для абонентов первой группы приводит к ничтожно малой интенсивности потока отсчетов (на уровне 10-4 с-1).
Наша задача состоит в том, чтобы для каждого приемного устройства установить некоторый "оптимальный" порог селекции, при котором вероятность потери сообщения абонента, находящегося в зоне ответственности, не превышала бы заданную, и, в тоже время, число "лишних" отсчетов, передаваемых на ЦС, было бы минимально.
В принципе, возможен следующий подход - для каждого приемного устройства производится осмотр обслуживаемой территории, определяется зона его ответственности, определяется зона конфликта и максимально возможная интенсивность потока сообщений Imax от абонентов, попадающих в зону конфликта, после чего устанавливается такой порог селекции, при котором приемное устройство в единицу времени будет принимать не менее, чем Imax сообщений.
Однако существует гораздо более простой и эффективный способ оптимального выбора порога селекции.
Действительно, пусть интенсивность потока отсчетов, передаваемых каждым приемным устройством на ЦС, определяется командами ЦС, т.е. между ЦС и каждым приемным устройством установлена двухсторонняя связь.
В соответствии с командами ЦС каждое приемное устройство автоматически устанавливает такой порог селекции, при котором число отсчетов, отсылаемых на ЦС за временной такт работы приемного устройства (см. п.3.5), равно заданному. Кроме того, приемное устройство определяет амплитуду сигналов, проходящих порог селекции, сортирует полученные в течение временного такта сигналы в порядке убывания их амплитуды и ставит в соответствие каждому сигналу его номер в полученном массиве.
Для каждого поступившего на ЦС отсчета определяется, соответствует ли данный отсчет событию, произошедшему в зоне ответственности данного приемного устройства, для чего ко всем отсчетам, поступившим от разных приемных устройств, но имеющим одинаковый ИК, применяется метод определения координат, изложенный в п.3.2. При этом определяются координаты абонента и устанавливаются отсчеты, соответствующие прямым лучам. Если отсчет, присланный данным приемным устройством соответствует прямому лучу, и, кроме того, указанное приемное устройство входит в число K' ближайших к абоненту "прямых" устройств, то этот отсчет соответствует событию, произошедшему в зоне ответственности данного приемного устройства.
Рассмотрим случайную величину - максимальный номер сигнала, поступившего из зоны ответственности данного приемного устройства в течении данного такта (т. е. рассматривается сигнал, имеющий наименьшую амплитуду среди всех сигналов, поступивших из зоны ответственности приемного устройства в течение временного такта). Для указанной случайной величины в процессе работы системы легко может быть построена эмпирическая функция распределения, которая позволит установить для данного приемного устройства оптимальный поток отсчетов, передаваемых на ЦС. Действительно, рассматривая указанную функцию, можно определить вероятность потери полезного сигнала при снижении "планового задания" по приему сообщений абонентов, установленного для данного приемного устройства. Если величина снижения вероятности безошибочного приема сообщения абонента не приводит к понижению коэффициента готовности ниже заданного уровня, интенсивность потока отсчетов, передаваемых данным приемным устройством, снижается по команде ЦС.
Приведем оценки для вероятности безошибочного приема сообщения абонента приемным устройством P и для коэффициента готовности системы Г в зависимости от величин K, K' и P.
Пусть I-поток сообщений на входе приемного устройства, проходящих порог селекции, и τ -длительность каждого сообщения. Сообщение рассматриваемого абонента из зоны ответственности приемного устройства будет потеряно в случае, если в течение интервала времени 2τ на приемное устройство поступит сообщение какого-либо другого абонента, сигнал которого проходит порог селекции. Поскольку мы предполагаем поток сообщений абонентов пуансоновским, имеем:
P = (1-2τ)I-1, (1)
где размерность [τ] = c, [I] = c-1.
Очевидно, справедливо следующее соотношение:
Значения величин P и Г для K = 10, K' = 12, τ = 200×10-6 с приведены в табл. 1 и 2.
Из приведенных в табл. 1 и 2 оценок следует, что предложенный нами "асинхронный" протокол обмена вполне пригоден для решения поставленных в п.1 задач. Тем не менее, мы рассмотрим некоторую модификацию изложенного выше метода.
Идея метода состоит в том, что абонент имеет право начать передачу сообщения лишь при условии, что вблизи него нет других абонентов, уже передающих сообщения.
Предполагается, что УВ оснащены приемными устройствами с той же рабочей частотой, что и приемные устройства МПРЛС. Приемные устройства УВ включают средства для проведения амплитудной селекции принимаемых сигналов. УВ передает сообщение лишь в момент, когда на входе приемного устройства отсутствуют сигналы, проходящие порог селекции. Очевидно, что при оптимальном выборе порога селекции такой протокол обмена приводит к высокой вероятности безошибочного приема сообщения (см. ниже).
Для выбора оптимального порога селекции мы предлагаем использовать следящее устройство, которое устанавливает порог селекции таким образом, что число принимаемых в единицу времени сигналов, проходящих порог селекции, равно некоторой фиксированной величине.
Рассмотрим конкретный пример.
Пусть τ = 200×10-6c, и приемное устройство УВ принимает каждую секунду 1000 сигналов, проходящих порог селекции. Будем считать, что весь поток сообщений вызван абонентами второй группы, равномерно рассеянными по городу. Согласно сделанным ранее предположениям, 1000 сигналов соответствует 10000 абонентов, причем все эти абоненты расположены в круге радиусом ≈ 1000 м, в центре которого находится рассматриваемый абонент. Из-за малой величины радиуса зоны конфликта (≈ (300-500) м) в число абонентов, оказывающих влияние на решение УВ о начале передачи сообщения, заведомо попадут абоненты, находящиеся в зоне конфликта. Тем самым "почти" (см. ниже) исключается возможность одновременной передачи сообщений двумя абонентами, находящимися в зоне конфликта данного приемного устройства.
При сделанных предположениях вероятность того, что УВ сможет начать передачу сообщения в произвольно выбранный момент времени, составляет 0.8 (поскольку общая длительность всех сообщений, проходящих порог селекции в течение каждой секунды, составляет 200•10-6•1000 = 0.2 с). Если начать передачу сообщения в некоторый момент времени не удалось из-за наличия на входе приемного устройства УВ сигнала, проходящего порог селекции, повторная попытка будет сделана через промежуток времени ≈τ. Нетрудно показать, что с вероятностью 0.9997 время ожидания "свободного канала" не превышает 5τ. Мы могли бы для выбора порога селекции не задавать фиксированное число сообщений, как было предложено выше, а потребовать от следящего устройства, определяющего порог селекции, устанавливать этот порог на таком уровне, при котором общая длительность сообщений, принимаемых в течение временного такта и проходящих порог селекции, составляла бы некоторую фиксированную часть длительности временного такта.
Возможность потери сообщения при таком протоколе обмена полностью не исключена, поскольку рассматриваемый абонент "узнает" о наличии другого абонента лишь через промежуток времени, необходимый для распространения сигнала от второго абонента к первому. Поскольку для нас существенны лишь абоненты, находящиеся в зоне конфликта, указанный промежуток времени не превышает величины θ = D/c, где D - диаметр зоны конфликта, с - скорость распространения радиоволн. Так как D < 1000 м практически для любого участка городской территории, будем считать что θ ≈ 3×10-6. Соответственно, вероятность безошибочного приема сообщения при максимальном потоке отсчетов (I = 300 ) составляет:
P = (1 - 3•10-6)300≈0.999 (3)
Существует еще один простой способ, позволяющий повысить вероятность безошибочного приема для абонентов, предъявляющих повышенные требования к коэффициенту готовности системы. Именно, абонентов 1-ой группы следует оснащать более мощными передатчиками, чем абонентов 2-ой группы, при этом приемное устройство в случае одновременного поступления на его вход двух сообщений, проходящих порог селекции и имеющих существенно разную амплитуду, должно игнорировать сообщение с меньшей амплитудой и передавать на ЦС сообщение с большей амплитудой.
Варианты технической реализации предложенных способов организации информационного обмена рассмотрены в п.3.5.
Ранее мы не рассматривали вопрос о зоне охвата ЦС. Мы предполагали, что на территории города имеется одна ЦС. Однако понятие "город" довольно условно, поскольку, например, города Москва и Химки не имеют внешне различимой границы и используют общие коммуникации. По-видимому, наиболее рациональным является подход, при котором зона охвата каждой ЦС строго соответствует административным границам территориального образования. Однако в этом случае могут возникнуть проблемы при определении координат ПО, находящихся вблизи границы двух или большего числа зон охвата, поскольку на каждую из ЦС поступит лишь часть прямых сигналов ПО. Принципиально решение этой проблемы состоит в том, что приемные устройства, находящиеся вблизи границы нескольких зон охвата передают полученные отсчеты одновременно на все заинтересованные ЦС. Технические подробности изложены в п.3.5.
3.5 СИСТЕМА РАДИОСВЯЗИ АБОНЕНТОВ С ЦЕНТРАЛЬНОЙ СТАНЦИЕЙ С ИДЕНТИФИКАЦИЕЙ АБОНЕНТОВ И ОПРЕДЕЛЕНИЕМ ИХ МЕСТОПОЛОЖЕНИЯ. ПРЕДПОЧТИТЕЛЬНЫЙ ВАРИАНТ РЕАЛИЗАЦИИ
Согласно настоящему изобретению городская многофункциональная система радиосвязи абонента с центральной станцией (ЦС) с идентификацией абонента и определением его местоположения в предпочтительном варианте состоит из следующих элементов:
1. Множества передающих устройств (У В), которыми оснащаются абоненты системы (15,16);
2. Множества приемных устройств, которыми оснащаются все здания обслуживаемой территории согласно способу, изложенному в п.3.1 (1);
3. Средств, обеспечивающих наличие на приемных устройствах последовательностей временных меток (14);
4. Множества концентраторов 9, установленных на подстанциях городской телефонной сети;
5. Множества выделенных телефонных линий 8, каждая из которых связывает одно или несколько приемных устройств с одним из концентратором, причем связь между концентратором и каждым из приемных устройств двунаправлена;
6. Некоторого числа ЦС 11, каждая из которых имеет некоторую зону охвата. Все ЦС связаны друг с другом линиями связи 10. Каждый концентратор связан с одной или несколькими ЦС оптоволоконными или микроволновыми линиями и связь между концентратором и ЦС двунаправлена;
7. Средств, обеспечивающих определение координат приемных устройств при развертывании системы (13);
8. Некоторого числа пользователей системы 12, каждый из которых имеет линию связи с ЦС.
Схематический внешний вид устройства показан на фиг. 1, функциональная схема показана на фиг. 2.
На приемные устройства системы поступают радиосообщения абонентов и последовательность временных меток. Каждый абонент системы имеет уникальный идентификационный код, хранящийся в постоянном запоминающем устройстве (ПЗУ) УВ и являющийся частью сообщения абонента. Абоненты передают сообщения асинхронно, в заранее неизвестные моменты времени (см. п.3.4). Приемные устройства имеют средства для определения амплитуды сообщений, проведения селекции и определения времени поступления сообщений. Порог селекции устанавливается приемным устройством таким образом, что поток сообщений, проходящих порог селекции, равен заданному, установленному данному приемному устройству командами ЦС. Полученное от абонента сообщение, оценка его амплитуды, время поступления на приемное устройство (отсчет) по выделенной телефонной линии передается на концентратор.
Концентратор добавляет к отсчету номер приемного устройства, по номеру приемного устройства определяет ЦС, зону охвата которой обслуживает данное приемное устройство, и передает отсчет на ЦС. Если приемное устройство находится вблизи границы зон охвата нескольких ЦС, то отсчет приемного устройства передается на все заинтересованные ЦС. Соответствие между номерами приемных устройств и ЦС - адресата устанавливается командами ЦС концентратору.
На ЦС производится идентификация абонента, при необходимости определение его координат (см. п. 3.2) и определяется конечный получатель информации (пользователь), которому по линии связи передается сообщение абонента, его данные и координаты.
Одновременно с определением координат на ЦС производится тестирование приемных устройств, определяются неисправные приемные устройства, для каждого исправного приемного устройства устанавливается оптимальная интенсивность потока отсчетов, для чего ЦС формирует команды и передает их на приемные устройства.
Приемные устройства имеют разъемы для подключения различных внешних устройств, например светофора, устройства для обслуживания кредитных карточек, благодаря чему создается эффективная двусторонняя система проводной связи между внешними устройствами и ЦС.
3.5.1 УСТРОЙСТВО ВЫЗОВА ЦЕНТРАЛЬНОЙ СТАНЦИИ
В предпочтительном варианте изобретения все абоненты системы передают радиосообщения в одном частотном диапазоне.
Возможным решением являлось бы использование для передачи сообщения последовательности коротких (≈1-10 нс) прямоугольных импульсов без высокочастотного заполнения, показанных на фиг. 42, см./ Хармут X. Ф. Несинусоидальные волны в радиолокации и радиосвязи. Пер. с англ. М.: Мир, 1985.- 376 с., Хармут X. Ф. Теория секвентного анализа: основы и применения. Пер. с англ. - М.: Мир, 1980.- 575 с./. Однако такая техника в настоящее время не является общепринятой и далее при изложении вариантов реализации изобретения мы будем ориентироваться на традиционные технические решения.
Далее будем предполагать, что сообщение кодируется в позиционной двоичной системе исчисления - см. фиг. 43, причем единице соответствует волновой цуг, а нулю - пауза. Частота несущей частоты составляет ≈ 1 ГГц. Будем предполагать, что сообщение всегда начинается с единицы и не содержит более 4 нулевых битов подряд. Длительность волнового цуга выбирается, исходя из ширины выделенной для УВ полосы частот, и может составлять от 10 до 100 нс. Отметим, что использование "коротких" (порядка 10 нс) цугов вряд ли целесообразно, поскольку требует выделения широкой полосы частот и реально не приводит к увеличению точности определения времени поступления сигнала на приемное устройство из-за увеличения длительности импульса при его распространении в условиях города. Разумней использовать более длинные волновые цуги, "укорачивая" их на этапе приема, как это предлагается в п.3.4.
Поскольку для нас представляет интерес фронт импульса, следует соответствующими схемотехническими решениями обеспечить прямоугольную форму огибающей на выходе передатчика. Так, форма сигнала на выходе передатчика, показанная на фиг. 40, для нас неприемлема в отличии от формы сигнала, показанной на фиг. 39. Такая форма сигнала будет иметь место, например, в случае, если конденсатор колебательного контура выходного каскада передатчика перед передачей волнового цуга предварительно заряжен, либо, если в качестве усилителя мощности передатчика использован широкополосный усилитель (см., например / Схемотехника устройств на мощных полевых транзисторах: Справочник/ В. В. Бачурин, В. Я. Ваксенбург, В. П. Дьяконов и др. Под ред. В. П. Дьяконова. - М.: Радио и связь, 1994.-280 с./). Полоса частот, занимаемая импульсом, в основном зависит от длительности импульса и слабо зависит от формы огибающей.
УВ в простейшем исполнении показан на фиг. 44.
ПЗУ содержит уникальный идентификационный код абонента. Датчики D1 - Dn могут приводиться в действие как вручную, так и автоматически. Датчик может срабатывать периодически с заданным периодом. Датчиком срабатывания может служить приемник, принимающий радиокоманды. Радиокоманда содержит ИК абонента-адресата, и срабатывание датчика происходит при совпадении ИК абонента с ИК, хранимым в ПЗУ. МП устанавливает факт срабатывания датчиков, формирует сообщение абонента, состоящее из ИК и номеров сработавших датчиков, и управляет работой передатчика.
УВ в предпочтительном варианте показано на фиг. 45. В соответствии с изложенным в п.3.4 методом обеспечения высокого уровня вероятности безошибочного приема сообщения УВ имеет приемный канал с той же рабочей частотой, что и передатчик.
При срабатывании датчика МП выполняет программу выбора оптимального порога селекции. Приемный канал УВ (позиции 32-41) полностью аналогичен приемному каналу приемного устройства МПРЛС (см. п.3.5.2). Факт наличия сообщения абонента, проходящего порог селекции, устанавливается по следующему алгоритму: после того, как обнаружен единичный бит, проходящий порог селекции, МП в течение времени, необходимого для передачи 5 бит (10•10-6 с), ожидает появления очередного единичного бита. Если в течение указанного времени единичный бит, проходящий порог селекции, на вход приемного устройства не поступил, МП считает, что в данный момент на входе приемного устройства отсутствует сообщение, проходящее порог селекции. Подсчет числа сообщений производится следующим образом: определяется интервал времени между моментом поступления единичного бита, проходящего порог селекции, и ближайшей 5-битовой паузой. Если длительность интервала превышает длительность передачи сообщения (200•10-6 с), то число сообщений определяется как частное указанных величин. В противном случае МП считает, что в указанный интервал времени поступило одно сообщение.
МП выбирает некоторое начальное значение порога селекции (например, оптимальное значение порога селекции, полученное при предыдущей передаче сообщения) и в течение некоторого фиксированного временного такта (например, в течение 100 мс) определяет число сообщений абонентов, проходящих порог селекции. Если указанное число близко к заданному (например, находится в пределах от 100 до 300), в качестве порога селекции выбирается текущее значение. Если число сообщений, проходящих порог селекции, отлично от заданного, МП, используя принцип обратной связи, определяет оптимальное значение порога в течение нескольких тактов.
После того, как оптимальный порог селекции установлен, МП инициирует передатчик в момент отсутствия на входе приемного устройства сообщения, проходящего порог селекции.
В зависимости от назначения УВ могут иметь конструктивные особенности, рассматриваемые ниже.
1. УВ для охраны физического лица.
УВ работает в импульсном режиме с большой скважностью, поэтому даже при импульсной мощности в 100 Вт для электропитания УВ достаточно двух батарей формата AAA. Соответственно, УВ легко может быть выполнено малогабаритным (масса ≤50 грамм).
В обычном исполнении УВ имеет датчики, приводимые в действие вручную, т. е. имеет кнопки для вызова экстренных служб - пожарной охраны, милиции и скорой медицинской помощи. При срабатывании УВ передает радиосообщение многократно, в течение времени, достаточного для прибытия патруля экстренной службы с интервалом, например, в одну секунду. Указанное время для условий г. Москвы не превышает одной-двух минут при условии, что на территории города одновременно находится 500 патрульных автомобилей экстренной службы и каждый из указанных автомобилей является абонентом рассматриваемой системы. Многократное повторение сообщения позволит дежурному подразделения экстренных сил "навести" патрульный автомобиль на точку вызова в реальном масштабе времени с учетом изменения координат вызывающего абонента.
УВ следует оснащать устройством, изменяющим свое состояние при приведении УВ в действие - механической пломбой или соответствующей электронной схемой. В этом случае лицо, необоснованно вызвавшее экстренную службу, легко может быть привлечено к ответственности.
УВ может дополнительно оснащаться встроенным микрофоном и малогабаритным магнитофоном, приводимым в действие автоматически при вызове милиции. В этом случае создается доказательная база для раскрытия таких преступлений, как угрозы и вымогательство.
Возможны специальные варианты исполнения УВ, при которых УВ срабатывает автоматически. В этом случае физическое лицо размещает на своем теле датчики, измеряющие такие параметры, как пульс, давление, влажность кожи и пр. При резком изменении этих параметров, происходящих в результате приступа заболевания, травмы, ранения, смерти или даже сильного испуга происходит автоматический вызов экстренных служб.
2. УВ для охраны автомобиля.
При значительной мощности передатчика передающая антенна УВ может размещаться практически в любом месте салона автомобиля или даже под его днищем. Из-за небольшой средней мощности потребления УВ может иметь автономный источник энергии. Датчики УВ должны срабатывать при проникновении в автомобиль, его буксировке, запуске двигателя, начале движения. УВ может оснащаться кнопками ручного вызова экстренных служб - пожарной охраны, милиции, скорой медицинской помощи, государственной автомобильной инспекции. УВ может иметь канал приема радиокоманд и срабатывать по радиокоманде.
3. УВ для слежения за автомобилем.
В простейшем случае УВ срабатывает периодически, с заранее заданным периодом. При каждом срабатывании происходит однократная передача ИК.
Если УВ используется для слежения за патрульными автомобилями экстренных служб или автомобилями такси, УВ может иметь приемник радиокоманд и изменять период передачи ИК при поступлении соответствующей команды. Обычно указанные автомобили имеют радиотелефонные каналы связи с диспетчером. Если использовать эти же каналы и для передачи радиокоманд, реально трафик этих каналов не вырастет, а снизится, т.к. время, необходимое для передачи водителем автомобиля информации о своих координатах в режиме диалога с диспетчером многократно превышает время, необходимое для передачи радиокоманды.
УВ может также оснащаться переключателем, определяющим информационное сообщение. Например, УВ автомобиля такси может передавать сообщение "Свободен", "Занят", "Не работаю".
В ряде случаев может оказаться целесообразным выполнять УВ с легкосъемным (заменяемым) ПЗУ. В этом случае при приеме смены водитель автомобиля вставляет в разъем УВ ПЗУ, содержащее его личный код. При таком подходе упрощается решение вопросов учета рабочего времени водителя и контроля его дисциплины.
3.5.2 ПРИЕМНЫЕ УСТРОЙСТВА МПРЛС
В п. 3.1 был рассмотрен вопрос о размещении приемных устройств МПРЛС (станций). В п.3.4 обсуждался способ оценки амплитуды сообщений абонентов и способы проведения селекции. Для каждого сообщения, поступившего на станцию и прошедшего порог селекции, необходимо определить время его поступления. Принципиально возможны следующие способы решения этой задачи:
1. Все приемные устройства оснащаются сверхточными часами;
2. По линии связи, связывающей приемное устройство с концентратором, на приемное устройство поступает последовательность синхронизирующих импульсов;
3. Для передачи синхронизирующих импульсов используется радиочастотный канал, для чего на территории города устанавливается один или несколько передатчиков синхронизирующих импульсов.
4. Для передачи синхронизирующих импульсов используется радиочастотный канал, причем передатчик синхронизирующих импульсов размещается на геостационарном искусственном спутнике земли.
1-ый способ не приемлем из-за высокой стоимости и низкой надежности, 2-ой способ возможен, если для связи приемных устройств с концентратором используется оптоволоконная или микроволновая линия. В этом случае концентратор может быть оснащен стабильным генератором и средствами для периодического определения времени распространения сигнала от концентратора к станции (указанное время является нестабильной величиной и зависит, в частности, от температуры линии связи). Недостаток 3-его способа состоит в том, что он не обеспечивает для значительного числа приемных устройств прямой видимости антенны передатчика. Из практики известно, что телевизионная антенна коллективного пользования часто оказывается вне зоны прямой видимости со стороны антенн ретранслятора телецентра и ее приходится настраивать на прием сигнала, отраженного от ближайших зданий. В этом случае можно добиться уверенного и стабильного приема сигнала, однако сигнал поступает на антенну с некоторой задержкой. Важно, что указанная задержка стабильна и может не изменяться годами, если только вблизи антенны не построено новое здание или не разрушено старое. Соответственно, если передатчик синхронизирующих импульсов разместить на мачте ретранслятора телевизионных программ, в качестве приемной антенны использовать антенну с узкой диаграммой направленности, провести ее тщательную настройку и периодически производить измерение временной задержки поступления сигнала, то в рамках рассматриваемого способа можно достичь приемлемых результатов.
Далее в качестве предпочтительного варианта мы будем рассматривать 4-ый способ, поскольку при положении спутника, близком к зениту, он обеспечивает прямую видимость передающей антенны, и, соответственно, наиболее стабильные условия приема. Кроме того, этот способ не требует затрат квалифицированного труда при установке приемных антенн. Хотя задержка распространения сигнала представляет собой нестабильную величину, зависящую от состояния ионосферы, существенно, что в пределах виртуальной зоны, из-за малого ее размера (D < 300 м), величина задержки практически одинакова для всех станций и, соответственно, не влияет на точность определения координат (см. п.3.2).
Период повторения синхронизирующих сигналов поддерживается с высокой степенью точности. Для определенности будем предполагать, что длительность каждого сигнала составляет 100 нс, а период повторения равен 10 мкс ± 0.01%. Будем считать также, что помимо указанной последовательности передатчик излучает последовательность сигналов, сдвинутых по фазе на 5 мкс по отношению к первой и имеющих период повторения 100 мс. Эта последовательность необходима для синхронизации информационного обмена между станцией и концентратором (см. п.3.5.3). Далее каждый временной интервал, начинающийся с поступления импульса второй последовательности, называется тактом приемного устройства.
Синхронизирующие сигналы 1-ой и 2-ой последовательности показаны на фиг. 46.
Функциональная схема приемного устройства МПРЛС показана на фиг. 47.
Канал синхронизирующих импульсов состоит из антенны 42, приемника 43, ГТИ 44 и счетчика 45. ГТИ предназначен для преобразования последовательности синхронизирующих сигналов в последовательность коротких видеоимпульсов с высокой крутизной фронтов. Фазы обоих последовательностей жестко связаны друг с другом. Известно множество технических решений, позволяющих выполнить указанное преобразование. Поскольку эти технические решения хорошо разработаны и общеизвестны, мы их не будем здесь обсуждать.
ГТИ синхронизирован указанной выше последовательностью видеоимпульсов как показано на фиг. 48. Поскольку период повторения синхронизирующих сигналов поддерживается с высокой степенью точности, с высокой степенью точности известен период повторения тактовых импульсов. Тактовые импульсы используются для синхронизации микропроцессора и определения времени поступления сообщений абонентов. Тактовые импульсы подсчитываются счетчиком 45. Счетчик обнуляется с приходом каждого синхронизирующего видеоимпульса второй последовательности (т. е. каждые 100 мс). По команде МП значение счетчика может быть переписано в память МП.
Канал приема сообщений абонентов состоит из антенны 32, широкополосного усилителя высокой частоты 33, детектора 34, видеоусилителя 35, дифференцирующей цепочки 36.
Максимальное значение амплитуды видеоимпульсов на выходе дифференцирующей цепочки является монотонной функцией амплитуды сигнала. Амплитуда сигналов, проходящих порог селекции, может иметь разброс в пределах 4-6 порядков. Соответственно, для получения оценки амплитуды в цифровой форме необходимо либо использовать АЦП 38 с большим числом разрядов (≈20), либо прологарифмировать сигнал, поступающий с цепочки 36. Второй способ предпочтительней. Для логарифмирования сигнала используется логарифмический усилитель 41.
Порог селекции в цифровой форме устанавливается микропроцессором. Для получения порога селекции в аналоговой форме используется ЦАП 37.
Для селекции сигналов использован компаратор 39. На инвертирующий вход компаратора поступает порог селекции с выхода ЦАП 37. На второй вход поступает прологарифмированный импульс с цепочки 36. Если амплитуда сигнала с усилителя 41 превышает порог селекции, выходной сигнал компаратора имеет высокий уровень. Переход выходного сигнала компаратора от низкого к высокому уровню вызывает прерывание МП. Программа обслуживания прерывания, в частности, включает команды, обеспечивающие отцифровку максимального значения производной огибающей. Отцифровка производится при переходе сигнала компаратора от высокого уровня к низкому. В этот момент МП активизирует АЦП 38. После поступления сигнала готовности АЦП полученные данные считываются в память МП и МП обнуляет схему определения максимального значения 40.
После поступления фронта единичного бита, проходящего порог селекции, МП устанавливает некоторое новое значение порога селекции на время завершения передачи бита (в нашем примере 2 мкс). Например, порог селекции может устанавливаться таким образом, что сигнал с любой амплитудой, поступивший ранее чем через 2 мкс после поступления фронта, будет проигнорирован. Порог селекции также может быть установлен таким образом, что прерывание МП возникнет при поступлении сигнала, амплитуда которого в заданное число раз (например, в 3 раза) превысит амплитуду сигнала, поступившего в течение предыдущих 2 мкс. При таком способе из двух различных сообщений абонентов, имеющих существенно различную амплитуду и поступивших на приемное устройство одновременно, может быть выделено и передано на ЦС сообщение с большей амплитудой (см. п.3.4).
В целом алгоритм работы МП выглядит следующим образом.
Для каждой станции командами ЦС устанавливается число сообщений абонентов, которые должны в течение такта (в нашем примере в течение 100 мс) пройти порог селекции, причем для каждого сообщения, проходящего порог селекции, должно быть определено время его поступления на станцию и сделана оценка его амплитуды. Очевидно, сообщения, проходящие некоторый порог селекции, имеют максимальную амплитуду среди всех сообщений, которые в принципе могли бы быть приняты станцией при любом более низком уровне селекции.
Указанное "плановое" число сообщений хранится в памяти МП (вопросы информационного обмена между станцией, концентратором и ЦС рассмотрены в п. 3.5.3). МП подсчитывает число сообщений, проходящих порог селекции, и постоянно подстраивает порог селекции таким образом, что число сообщений, прошедших порог селекции в течение такта, превышает заданное например, на 20%. Прием большего числа сообщений, чем это требовалось бы согласно команде ЦС, связан с тем обстоятельством, что при любом пороге селекции число сообщений, поступающих в течение такта, представляет собой случайную величину, имеющую некоторый статистический разброс. Перед передачей полученных сообщений на ЦС "лишние" сообщения, имеющие наименьшую амплитуду среди всех полученных, будут устранены (см. ниже).
Одновременно с приемом сообщения определяется время его поступления и оценивается его амплитуда в некоторых условных единицах (логарифм величины, имеющей размерность B2/с и умноженной на некоторый безразмерный коэффициент, различный для различных приемных устройств).
Время поступления сообщения определяется следующим образом:
1. При поступлении каждого единичного бита, проходящего порог селекции, происходит прерывание МП. МП считывает текущее значение счетчика 45 и умножает его на период повторения тактовых импульсов, т.е. для каждого единичного бита устанавливается время его поступления на станцию, причем началом отсчета временной шкалы считается момент поступления на станцию синхронизирующего импульса второй последовательности.
2. После завершения поступления сообщения (сообщение считается завершенным, если принято 5 нулевых бит подряд) производится оценка времени поступления сообщения. В качестве указанной оценки используется сумма времен поступлений всех единичных бит сообщения, деленная на число единичных бит в сообщении.
При указанном способе оценки времени поступления сообщения на станцию мы определяем время поступления первого единичного бита на приемное устройство плюс некоторый временной интервал, одинаковый для всех приемных устройств, принявших рассматриваемое сообщение.
Действительно, при указанном способе мы определяем величину:
где Δt1i - - интервал времени между 1-ым и i-ым единичным битом,
K - число единичных бит в сообщении.
Мы не требуем, чтобы УВ поддерживало временные интервалы между передаваемыми битами с высокой степенью точности, поскольку при любых величинах указанных интервалов второе слагаемое в правой части (1) одинаково для всех приемных устройств, принявших сообщение. При используемом нами методе определения координат одинаковая для всех приемных устройств систематическая ошибка определения времени не приводит к ошибке определения координат (см. п. 3.2).
Преимущество изложенного выше метода определения времени поступления сигнала на станцию состоит в том, что интересующая нас величина t1 определяется путем усреднения K независимых измерений, что существенно снижает ошибку метода. В частности, мы можем измерять время поступления сигнала с погрешностью, меньшей, чем период повторения тактовых импульсов микропроцессора. Оценки показывают, что при тактовой частоте МП в 100 МГц погрешность метода составляет ≈ 1нс.
Оценка амплитуды сигнала производится для каждого единичного бита сообщения, проходящего порог селекции. Многолучевое распространение сигнала не приводит к различию в амплитудах единичных бит, составляющих одно сообщение (см. п. 3.4 замечание 1). Различие в амплитудах вызвано лишь наличием на входе приемного устройства сигналов, не проходящих порога селекции (шума). Порог селекции (или, что то же, "план по приему сообщений") всегда может быть установлен таким образом, что полезный сигнал с заданным уровнем вероятности пройдет порог селекции с достаточным запасом по амплитуде (оценки в п. 3.4 сделаны в предположении, что амплитуда сигнала из зоны ответственности по крайней мере в трое превышает амплитуду сигнала, "еле-еле" проходящего порог селекции). Учитывая небольшой разброс амплитуд единичных импульсов, можно предложить множество различных процедур усреднения амплитуд, не требующих сложных вычислений.
К концу временного такта работы станции в памяти МП находятся сообщения, принятые в течение такта, оценка времени их поступления и оценка их амплитуды в условных единицах. Общее число этих сообщений превышает величину "плана", установленного для данной станции. После завершения временного такта МП выполняет следующую последовательность действий:
1. Учитывая фактическое число сообщений, прошедших порог селекции в течение завершившегося временного такта, МП уточняет порог селекции, который будет установлен в течение текущего такта;
2. Производит сортировку сообщений в порядке убывания их амплитуды;
3. Выделяет из этих сообщений N, имеющих максимальную амплитуду, где N - "плановое задание", установленное для данной станции. Сообщения, не входящие в указанные N, игнорируются;
4. Каждому сообщению ставится в соответствие его номер в отсортированном массиве, в частности, сообщение с максимальной амплитудой получает номер 1, а сообщение с наименьшей - номер N;
5. Из всей указанной информации формируется N отсчетов, которые затем по выделенной телефонной линии передаются на концентратор (см. п.3.5.3). В предпочтительном варианте перед передачей на концентратор отсчеты сортируются, например, в порядке возрастания ИК абонента. Сортировка потока отсчетов непосредственно на ЦС (для выделения отсчетов, относящихся к одному событию) связана со значительными вычислительными издержками, поскольку необходимое для сортировки время растет как квадрат числа отсчетов. Нагрузка на ЦС заметно снижается, если сортировка выполняется приемными устройствами и концентраторами.
Подчеркнем, что во время выполнения перечисленных действий МП проводит прием сообщений, "отрываясь" от выполнения изложенного выше алгоритма на время обслуживания прерываний, возникающих при поступлении сигналов, проходящих порог селекции.
Функциональное назначение станции состоит в приеме сообщений абонентов, выделении из них N, имеющих наибольшую амплитуду, формировании отсчетов и отправке этих отсчетов на концентратор. Кроме того, станция принимает команды, поступающие к ней от ЦС через концентратор, определяющие величину N, и обслуживает двусторонний информационный обмен между внешними устройствами, подключенными к станции, и ЦС через концентратор. Кроме того, команды ЦС могут переводить станцию в режим работы, отличный от штатного, например, для определения координат станции при развертывании системы или для определения координат постановщика маскирующих помех.
Отсчет станции состоит из следующих полей:
1. Сообщение абонента;
2. Оценка времени поступления сообщения;
3. Относительная амплитуда сообщения, т.е. порядковый номер сообщения в массиве, состоящем из всех передаваемых на ЦС в течение такта сообщений и отсортированном по амплитуде сообщений в условных единицах;
4. Контрольная сумма отсчета для контроля достоверности при передаче отсчета по линии связи;
5. Концентратор добавляет к отсчету поле, содержащее номер приемного устройства.
Остановимся на предпочтительных конструктивных решениях и технических требованиях, предъявляемых к приемным устройствам МПРЛС:
1. Станция должна выдерживать длительный срок эксплуатации в условиях, не защищенных от воздействий окружающей среды;
2. Станция не должна иметь собственного источника вторичного электропитания, а преимущественно запитываться от линии связи, соединяющей ее с концентратором;
3. При обрыве или несанкционированном доступе к линии связи между станцией и концентратором должен вырабатываться сигнал тревоги, передаваемый экстренным службам для реагирования;
4. При установке и замене станции не должен использоваться квалифицированный труд. Все станции должны быть взаимозаменяемыми;
5. Станция должна иметь малую стоимость, массу и габариты.
В предпочтительном исполнении станция монтируется на печатной плате и заливается в компаунд. Антенны каналов УВ и синхронизации крепятся непосредственно к монтажной плате. Станция имеет две двухпроводные линии - одна для подключения к выделенной телефонной линии и вторая для подключения внешних устройств. В подавляющем большинстве случаев станции расположены вдали от оживленных транспортных магистралей, поэтому может оказаться разумным подключение нескольких станций к одной выделенной телефонной линии. В этом случае необходимы простые согласующие устройства, каждое из которых имеет несколько разъемов для подключения станций и один разъем для подключения выделенной телефонной линии. Внешний вид станции и способ ее крепления на крыше здания показан на фиг. 49, 8, 9.
Низкая стоимость станции обусловлена отсутствием в ее составе каких-либо прецизионных устройств (за исключением, пожалуй, приемника синхронизирующих импульсов). Действительно, ГТИ синхронизируется один раз каждые 10 мкс, и вариацией таких факторов нестабильности, как напряжение питания и температура в течение указанного времени, можно пренебречь. Устройства, оценивающие амплитуду сообщений и проводящие их селекцию, должны иметь малый дрейф на протяжении 100 мс. Не предъявляется также каких-либо завышенных требований и к микропроцессору - ранее было показано, что при использовании соответствующих методов ошибка метода определения времени поступления сообщения ниже периода повторения тактовых импульсов, что позволяет использовать МП с низкой тактовой частотой - реально на уровне 30-50 МГц. Кроме того, алгоритм работы МП не требует применения операций с плавающей точкой. С учетом сказанного, при массовом производстве стоимость станции по-видимому не превысит $(10-15) в ценах 1996 г.
В заключение рассмотрим вопрос об определении координат приемных устройств и временных задержек синхронизирующих импульсов относительно "истинной" временной шкалы. Указанные задержки различны для различных станций, поскольку зависят от взаимных координат передатчика и приемника синхронизирующих импульсов и, в случае "наземного" базирования передатчика, от фактической длинны оптического пути сигнала с учетом всех отражений.
Если даже допустить, что координаты всех зданий в городе известны с достаточной степенью точности (на уровне долей метра), то "привязка" координат каждого приемного устройства к координатам здания представляет собой непростую задачу из-за необходимости проведения тщательных измерений координат приемного устройства относительно реперных точек здания и гигантского документооборота. Кроме того, такой способ не позволяет прямыми измерениями определить указанную выше величину задержки. Если передатчик синхронизирующих сигналов расположен на геостационарном спутнике, задержка в принципе может быть определена теоретически. Однако эта теоретическая величина не учитывает задержек в приемном канале, которые могут быть различны для разных станций. Если передатчик имеет "наземное" базирование, теоретическое определение задержек в принципе невозможно.
Предпочтительным вариантом решения этой проблемы является использование для определения координат станций радиолокационных методов. Способ определения координат станций и временных задержек показан на фиг. 50.
Пусть вертолет 13 последовательно "зависает" в нескольких точках, координаты которых известны с высокой степенью точности. Указанные точки выбраны с таким расчетом, что в прямой видимости со стороны каждого приемного устройства, координаты которого определяются, находится не менее 4-х точек. Вертолет оборудован передатчиком, работающим в диапазоне либо УВ, либо в диапазоне передатчика тактовых импульсов, и приемником тактовых импульсов. После того, как вертолет "завис" в заданной точке, он передает единичный бит. Бит передается синхронно с поступлением синхронизирующего импульса. Синхронизирующие импульсы поступают на приемное устройство с некоторой задержкой, равной времени распространения сигнала от передатчика тактовых импульсов до приемного устройства. Поскольку координаты вертолета и передатчика синхронизирующих импульсов известны с высокой степенью точности, легко могут быть сделаны поправки, позволяющие привести момент передачи единичного бита к "истинной" временной шкале. Будем считать, что единичный бит передается в момент времени t0. Пусть вертолет последовательно передает единичные биты из точек 1,2,3,4 каждый раз в момент времени t0. Указанные точки находятся в зоне прямой видимости со стороны приемного устройства 1. Сигналы передатчика поступают на приемное устройство 1 соответственно в моменты времени t1, t2, t3, t4.
Указанные времена каждый раз измеряются с систематической ошибкой Δ, равной задержке поступления на приемное устройство синхронизирующего импульса. Из-за обратимости хода лучей (условно считаем, что в точках 1,2,3,4 находятся приемные устройства, а в точке 1 - ПО) для определения координат приемного устройства 1 может быть использован метод, изложенный в п.3.2. В п. 3.2 показано, что систематическая ошибка Δ , одинаковая для всех измерений, не приводит к ошибке в определении координат. Определив координаты приемного устройства, мы можем легко определить задержку Δ. .
Отметим, что разумно применять к рассматриваемой задаче изложенный в п. 3.2 метод в полном объеме, т. е. использовать для определения координат приемного устройства большее, чем 4, число прямых сигналов. Кроме того, время поступления сигнала следует определять не по одному биту, а по значительному (сотням и тысячам) числу единичных бит. Применяя ко всем полученным данным соответствующие статистические процедуры, мы можем определить координаты ПО с большой степенью точности.
Простые оценки показывают, что для г. Москвы необходимо иметь ≈ 100 точек с известными координатами. В этом случае при высоте полета вертолета в 3-4 тысячи метров будет гарантирована прямая видимость со стороны каждого приемного устройства МПРЛС не менее 10 таких точек.
При определении приемными устройствами собственных координат приемные устройства по команде ЦС переводятся в специальный режим работы. Предполагается, что как приемные устройства, так и ЦС, имеют соответствующее программное обеспечение.
3.5.3 КОНЦЕНТРАТОР
Концентратор предназначен для организации двустороннего информационного обмена между приемными устройствами МПРЛС и ЦС. Кроме того, в предпочтительном варианте приемное устройство запитывается по выделенной телефонной линии связи, т.е. концентратор является источником вторичного электропитания для приемных устройств. Концентратор также обеспечивает защиту линии связи и приемного устройства от несанкционированного доступа.
Для определенности будем считать, что концентратор обслуживает 1000 приемных устройств, каждое из которых связано с одной или несколькими из 16 ЦС. Длительность временного такта приемного устройства равна 100 мс (см. п. 3.5.2).
Функциональная схема концентратора показана на фиг. 51.
Оперативная память 51 состоит из 2000 блоков 49 и 50, каждый из которых имеет объем ≈ 4 Кбайт. МП имеет произвольный доступ к любому байту памяти. С каждой парой блоков 49 и 50 связан порт ввода-вывода 48, который в свою очередь связан выделенной телефонной линией 8 с одним из множества приемных устройств МПРЛС. Для связи 48 с линией 8 используется модем 47. Каждый из портов 48 может независимо от МП либо производить запись данных, поступающих от приемного устройства в выделенный данному приемному устройству блок 49, либо независимо от МП производить чтение данных из блока 50 и передавать считанные данные на приемное устройство. Для связи с центральными станциями служат 16 микроволновых или оптоволоконных линий 10.
Первую половину временного такта производится передача данных от концентратора к приемным устройствам по выделенным линиям 8 и, одновременно с этим, передача данных от концентратора по линиям 10 к ЦС. Предполагается, что блоки памяти 49 и 50 содержат данные, записанные в них в течение второй половины предыдущего такта. Передача данных к приемным устройствам производится портами 48 из блоков 50 независимо от МП. В свою очередь МП производит передачу данных на ЦС по линиям 10. В п.3.5.2 указывалось, что в преимущественном варианте отсчеты, поступающие от приемного устройства, отсортированы по ИК. Одновременно с передачей данных в линию МП производит слияние отсчетов, содержащихся в блоках 49, т.е. МП передает в линии 10 отсортированный поток отсчетов. Помимо команд для приемных устройств ЦС передает команды для концентратора, которые устанавливают связь между номерами приемных устройств и номерами ЦС, в зону охвата которых попадает данное приемное устройство. Эти команды хранятся в памяти и позволяют МП выбрать линию 10 для передачи отсчетов. Если приемное устройство находится вблизи границы зон охвата нескольких ЦС, отсчет этого приемного устройства передается всем "заинтересованным" ЦС, т.е. для передачи выбирается несколько линий 10.
Вторую половину временного такта производится передача данных от станций к концентратору по выделенным телефонным линиям и одновременно с этим передача данных от ЦС к концентратору по линии 10. Данные, поступающие от станций к концентратору, записываются в блоки памяти 49 портами 48 в автономном режиме без участия МП. В свою очередь МП принимает данные, поступающие по линии 10. Эти данные могут представлять собой команды для приемных устройств или данные для внешних устройств, подключенных к приемным устройствам. В любом случае данные, поступающие от ЦС, содержат номер приемного устройства - адресата. По номеру приемного устройства МП определяет блок памяти 50, в который помещает данные.
Возможно множество различных технических решений, позволяющих использовать линию связи для питания приемного устройства. Одно из таких решений показано на фиг. 52.
Предполагается, что модем 47 содержит разделительный трансформатор 53. Постоянное напряжение питания подключается к конденсатору 56. Конденсаторы 56,57 замыкают цепь информационного сигнала. На рисунке показан также входящий в модем приемного устройства разделительный трансформатор 54. Для питания модема и всего приемного устройства используется постоянное напряжение, выделяемое на стабилитроне 58. Из рисунка видно, что линия 8 используется как для передачи сигнала, так и для питания приемного устройства.
Поскольку все приемные устройства синхронизированы, фаза передаваемых на концентратор сигналов может поддерживаться с высокой стабильностью. Фаза сигналов, поступающих на концентратор, зависит от волновых свойств линии 8. При несанкционированном доступе к линиям 8 происходит изменение фазы сигналов, что может быть распознано фазовым компаратором 55. В этом случае концентратор вырабатывает сигнал тревоги и передает его экстренным службам для реагирования.
3.5.4 ЦЕНТРАЛЬНАЯ СТАНЦИЯ
Центральная станция связана линиями связи с несколькими концентраторами. По каждой из этих линий связи поступает отсортированный по идентификационному коду абонентов поток отсчетов. ЦС производит слияние потоков и выделяет отсчеты, относящиеся к одному событию (имеющие одинаковый ИК), после чего производит идентификацию абонента и при необходимости определяет его координаты. ЦС на основе идентификации и определения координат абонента определяет конечного получателя информации (пользователя). ЦС также выполняет функцию оптимальной организации системы - определяет неисправные приемные устройства и определяет оптимальный порог селекции для каждого приемного устройства (или, что тоже, оптимальный поток отсчетов, передаваемый приемным устройством).
В целом, ЦС представляет собой аппаратно-программный комплекс. Возможно использование как универсальной вычислительной техники, так и специализированных вычислительных средств.
Для выполнения поставленных задач ЦС должна располагать значительной вычислительной мощностью, соответствующим программным обеспечением и базами данных.
ЦС работает со следующими базами данных:
1. Идентификационные данные абонентов. База данных позволяет установить данные абонента по его ИК. Например, если абонент системы - автомобиль, вызывающий экстренную службу, по ИК следует установить его марку, цвет, номер гос. регистрации, данные владельца и пр.
2. Координаты приемных устройств и величины временных задержек поступления тактовых импульсов. База данных необходима для определения координат ПО согласно методу, изложенному в п.3.2.
3. Данные, позволяющие по координатам абонента и его сообщению установить конечного получателя информации (пользователя). Например, при вызове экстренных служб по номеру сработавшего на УВ абонента датчика устанавливается вызываемая экстренная служба, а по координатам ПО - ее территориальное подразделение.
4. Статистические данные, позволяющие установить оптимальный порог селекции (см. п.3.4) и установить неисправные приемные устройства (см. п.3.2). Кроме того, на основании статистических данных определяется радиус зоны ответственности каждого приемного устройства. Указанная база ведется по каждому приемному устройству. Для каждой станции, приславшей отсчет, устанавливается, соответствует ли этот отсчет событию, произошедшему в зоне ее ответственности. Если это так, то величина невязки и относительная амплитуда сообщения (см п.3.4) заносится в соответствующий файл.
Метод определения координат, изложенный в п.3.2, легко может быть сведен к практически асинхронному решению множества задач, каждая из которых относится к отдельной точке пространства.
Действительно, рассмотрим систему координат XOY (все последующие рассуждения легко могут быть обобщены на трехмерный случай). Рассмотрим дискретное множество точек с координатами X = x0+iΔ,Y = y0+kΔ, i,k = 0...L. Далее указанное множество будем называть решеткой с периодом Δ , а каждое из точек множества узлом решетки. Будем предполагать, что известна грубая оценка координат ПО и решетка покрывает область возможного положения ПО, т.е. соответствующим образом заданы координаты узла (0,0) и период Δ. Для определения указанных параметров следует отсортировав отсчеты в порядке возрастания ti, определить координаты узла (0,0) таким образом, чтобы приемное устройство, соответствующее наименьшему tmin = ti, находилось в центре решетки, и выбрать Δ из условия L/2 × Δ > Rотв, где Rотв - радиус зоны ответственности (см. п. 3.4) приемного устройства с наименьшим ti. Величина Rотв для каждого приемного устройства первоначально может быть установлена с запасом, а затем уточняться в процессе работы системы (см. ниже). Из отсортированного массива следует исключить отсчеты, для которых ti - tmin>Rотв, что снизит вычислительные издержки и повысит достоверность определения координат (см. п.3.3). Если в результате оценок получено значение Δ , неприемлемое для определения координат с заданной точностью, задача может быть решена в два прохода по схеме грубо-точно.
Применительно к задачам, поставленным в п.1, z-координата ПО не представляет интереса. Если рельеф территории известен, то z-координата ПО может быть определена как функция x, y-координат ПО, поскольку обычно с достаточной для практики точностью известна высота расположения антенны над поверхностью земли h (например, для автомобиля h≈2 м). Соответственно, решение задачи следует искать на поверхности (x,y,ϕ(x,y)+h, где функция ϕ(x,y) описывает рельеф территории. Далее будем считать функцию ϕ известной в каждой точке решетки.
В предпочтительном варианте для решения задачи определения координат следует использовать специализированный вычислитель (СВ). Возможное техническое решение показано на фиг. 53.
На фиг. 53 показана матрица из (L + 1) х (L + 1) микропроцессоров (МП) 60. Каждый МП имеет ячейку памяти, содержащую "адрес" МП в матрице. Адрес представляет собой пару чисел i, k, i, k = 0...L. Каждый МП "отвечает" за узел решетки с координатами X = x0+iΔ,Y = y0+kΔ, где (x0, y0) координаты узла (0,0). Характерное значение L ≈100, Δ ≈ (3-10) м. Каждый имеет встроенную быстродействующую оперативную память (реально, необходимо не более 16 Кбайт). Все МП имеют общую шину данных 62, общую линию прерываний 63 и линию синхронизации 64. Загрузку программного обеспечения во все МП при включении питания, управление работой всех МП при решении задач определения координат, синхронизацию всех МП, обслуживание прерываний производит центральный процессор (ЦП) 61.
Для решения задачи определения координат во все МП загружаются одинаковые данные:
1. Координаты узла (0,0) решетки и ее период Δ;
2. Координаты всех станций, приславших отсчеты (xi, yi, zi) i = 1...N;
3. Времена поступления сигналов на все станции ti, i = 1...N;
4. Число "лишних" сигналов l (см. п.3.2, замечание 3).
5. Ожидаемое число прямых сигналов K + 1.
Т. е. в память всех МП загружается 4N + 5 числа (реально, N ≈ 15-30). Загрузка данных производится во все МП одновременно, т.е. ЦП помещает на шину данных очередное из вводимых чисел и инициирует прерывание всех МП. Программы всех МП одинаковы. Каждый МП считывает число с шины данных и записывает его в оперативную память. Поскольку величины времен поступления сигналов определены с точностью не лучше чем 10 нс, нецелесообразно вводить в МП величины координат приемных устройств с точностью выше, чем 1 нс. Соответственно, все вводимые данные могут быть представлены в формате целых чисел. Если размер зоны охвата не превышает 20 км, можно использовать числа длинной 16 бит.
В общем случае необходимо внести в память каждого МП также величину ϕ(x,y)+h для соответствующего данному МП узла решетки. Однако обычно ϕ представляет собой достаточно гладкую функцию и может быть апроксимирована незначительным числом плоских участков, например, четырехугольной формы. Каждый из этих участков полностью задается набором из 12 чисел. Мы можем последовательно вводить указанные наборы в память всех МП одновременно и каждый МП может определить собственную z-координату в автономном режиме.
После загрузки всех данных ЦП инициирует выполнение каждым МП программы вычисления функции правдоподобия в подконтрольной точке.
Алгоритм работы каждого МП выглядит следующим образом:
1. МП вычисляет координаты подконтрольной точки (x, y, z).
2. МП вычисляет N величин 
3. МП сортирует величины Φi в порядке возрастания.
4. МП вычисляет величину 
5. МП последовательно исключает из массива невязок не более чем l первых элементов, в случае, если для этих элементов величина 1-ой условной невязки меньше -1.5σ. При исключении каждого элемента производится перерасчет t0 согласно 4 (во всех формулах предполагается, что суммирование распространяется на первые K элементов массива, непосредственно следующих за исключенными).
6. МП вычисляет величину 
После того, как все МП выполнили указанный выше алгоритм, необходимо установить МП, вычисливший наименьшее значение Λ . В качестве оценки для координат ПО следует выбрать подотчетный указанному МП узел решетки, а в качестве оценки для t0 значение, вычисленное указанным МП. Простейшее решение состоит в последовательном опросе ЦП всех МП, однако в настоящее время известны гораздо более эффективные алгоритмы параллельной обработки информации. Например, можно использовать матрицу МП, организованную по принципу транспьютера. В этом случае МП обмениваются данными непосредственно друг с другом, не используя общую шину данных, за счет чего минимальный элемент может быть найден за небольшое число тактов.
Приведенный выше алгоритм не требует сложных вычислений и может быть выполнен за незначительное время. Нами был промоделирован указанный алгоритм на IBM PC/AT с процессором "PENTIUM" с тактовой частотой 120 МГц. Для оптимально написанной программы на ассемблере время вычисления для одной точки при N = 40 составляло 20 мкс. При этом был использован простейший ("пузырьковый") алгоритм сортировки и операции с плавающей точкой. Реально рассматриваемый алгоритм легко может быть реализован без использования операций с плавающей точкой, поскольку вычисление квадратного корня легко может быть сведено к табличным вычислениям. В целом оценки показывают, что при использовании эффективных МП с учетом вычислительных издержек, связанных с выделением отсчетов с одинаковым ИК, идентификацией абонента, тестированием и самоорганизацией системы время решения каждой задачи определении координат будет составлять не более 50 мкс. Соответственно, для решения в полном объеме всех поставленных в п.1 задач необходимо не более 10 СВ.
В ряде случаев (например, в случае, если в зону охвата данной ЦС попадает территория с малым числом абонентов) может оказаться целесообразным применение универсальных вычислительных средств. В этом случае целесообразно использовать иттерационные методы, изложенные в пп.3.2, 3.3.
После того, как установлена оценка для t0 и координат ПО для каждого приемного устройства (в том числе и для исключенных в п.5 алгоритма), может быть установлена величина невязки. Проведя сортировку отсчетов по невязкам в порядке возрастания, мы установим K + l приемных устройств, в чью зону ответственности попадает ПО (см.п.3.4). Для каждого из указанных приемных устройств легко может быть сделана оценка для ошибки определения времени δti:
δti= ti-t0-Li. (1)
Указанные ошибки заносятся в соответствующую базу данных. После достаточно длительной работы для каждого приемного устройства может быть получена гистрограмма распределения ошибок. Если для некоторого приемного устройства математическое ожидание ошибки значительно отлично от нуля, следует предположить, что указанное устройство либо неисправно, либо его координаты определены с ошибками, либо с ошибкой определена задержка времени распространения синхронизирующего сигнала.
В базу данных заносятся также расстояния между ПО и каждым приемным устройством, в зоне ответственности которого находится ПО. Указанные данные позволяют сделать статистическую оценку радиуса зоны ответственности каждого приемного устройства.
Помимо определения неисправных устройств, важной задачей ЦС является определение для каждого приемного устройства оптимального порога селекции или, что тоже, оптимального потока сообщений, передаваемого каждым приемным устройством (см. п. 3.4). Установка оптимального порога селекции позволяет повысить коэффициент готовности системы и снизить вычислительные издержки.
Для решения указанной задачи необходимо для каждого отсчета установить, поступил ли этот отсчет из зоны ответственности приемного устройства. Если это так, то в соответствующую базу данных вносится величина относительной амплитуды сигнала, т.е. порядковый номер сигнала в отсортированном по убыванию амплитуды массиве сигналов, принятых в течение временного такта приемного устройства. После длительной работы системы может быть получена гистрограмма относительной амплитуды сигналов, приходящих из зоны ответственности приемного устройства, которая позволит установить оптимальный порог селекции. Действительно, рассмотрим конкретный пример.
Пусть K = 10, K'= 12 (см. п.3.4) и некоторое приемное устройство принимает 300 сообщений • с-1. Из табл. 1 и 2 п.3.4 следует, что коэффициент готовности системы составляет 0.83. В процессе работы системы, после набора достаточной статистики, выяснено, что с вероятностью 0.99 относительная амплитуда сигнала, поступающего на данное приемное устройство от абонентов, находящихся в зоне его ответственности, не превышает 40. Пусть ЦС снизила "плановое задание" по приему сообщений до 50 с-1. Из табл. 1 и 2 видно, что, если даже для всех K' приемных устройств вероятность безошибочного приема сообщений будет снижена на 0.01 из-за "заниженного" "планового задания", из-за снижения вероятности конфликта при передаче сообщений указанная вероятность повысится и будет составлять 0.981•0.99≈0.97, т.е. коэффициент готовности системы повысится и составит 0.995.
4 ПЕРЕЧЕНЬ ФИГУР, ИЛЛЮСТРИРУЮЩИХ ИЗОБРЕТЕНИЕ
Фиг. 1 Схематический внешний вид городской многофункциональной системы радиосвязи абонента с центральной станцией с идентификацией абонента и определением его местоположения. Функциональная схема устройства показана на фиг. 2.
Каждый абонент системы 15,16 оснащен передатчиком для передачи радиосообщения на ЦС 11, причем каждое радиосообщение содержит уникальный идентификационный код абонента. ЦС устанавливает конечного получателя сообщения абонента - пользователя 12. Сообщения абонентов принимаются сетью приемных устройств 1 - многопозиционной радиолокационной станции (МПРЛС), причем приемными устройствами МПРЛС оборудуются все (или практически все) здания обслуживаемой территории. Способ размещения приемных устройств показан также на фиг. 8 и 9. При таком способе размещения из-за многолучевого характера распространения радиоволн в условиях города часть приемных устройств примут "прямой" сигнал абонента, а часть - сигнал абонента после его отражения от местных предметов.
Разработанный нами метод определения координат (см. п.3.2) позволяет в этих условиях определять координаты абонента с высокой точностью, причем даже в случае, если используются дешевые приемные устройства, имеющие низкую точность определения времени поступления фронта сигнала.
Важное свойство предлагаемой системы состоит в возможности обслуживания значительного потока сообщений абонентов в одном частотном диапазоне без передачи какой-либо информации, обеспечивающей многоканальность, от ЦС к абонентам, что возможно благодаря разработанному нами способу организации информационного обмена между абонентами и приемными устройствами (см п.3.4).
Несмотря на значительный поток сообщений в целом, число сообщений, передаваемых на ЦС каждым отдельным приемным устройством, не велико, и для связи приемных устройств с концентратором 9 используется выделенная телефонная линия 8. Выходом концентратора является оптоволоконная линия 10. Приемные устройства могут иметь разъемы 17 для подключения внешних устройств 18,19, при этом обеспечивается эффективная двусторонняя проводная связь между внешними устройствами и ЦС.
Для обеспечения синхронизации приемных устройств предназначен геостационарный искусственный спутник земли 14, оснащенный передатчиком.
Для определения координат приемных устройств после развертывания системы предназначен вертолет 13, оснащенный передатчиком.
Фиг. 2. Функциональная схема городской многофункциональной системы радиосвязи абонента с центральной станцией с идентификацией абонента и определением его местоположения в предпочтительном варианте.
Каждое приемное устройство 1 связано выделенной телефонной линией 8 с одним из концентраторов 9. Связь между каждым приемным устройством и концентратором двунаправлена. В предпочтительном варианте концентратор устанавливается на подстанции городской телефонной сети. Например, в условиях г. Москвы имеется около 100 000 зданий и 400 подстанций городской телефонной сети. Если считать, что на каждой подстанции установлен один концентратор, то всего необходимо 400 концентраторов, каждый из которых обслуживает около 1000 приемных устройств. Выделенная телефонная линия используется также для электропитания приемных устройств и их защиты от несанкционированного доступа.
В предпочтительном варианте каждое приемное устройство имеет два радиочастотных канала - один для приема сообщений абонентов и второй для приема последовательности временных меток, обеспечивающих синхронизацию системы. Для передачи синхронизирующих сигналов предназначен генератор синхронизации (ГС) 14, который в предпочтительном варианте устанавливается на геостационарном искусственном спутнике земли. Каждое приемное устройство включает средства для измерения амплитуды сообщений, поступающих от абонентов, и проведения амплитудной селекции. Если сообщение абонента проходит порог селекции, то приемное устройство определяет время его поступления и передает сообщение абонента, время его поступления, оценку его амплитуды в некоторых условных единицах на одну или несколько центральных станций (ЦС) 11, в зону охвата которых попадает. Каждое приемное устройство в автономном режиме поддерживает порог селекции на таком уровне, что число сообщений абонентов, проходящих порог селекции в единицу времени, равно заданному, установленному для каждого приемного устройства командами ЦС (п.3.4).
Некоторое число ЦС связано друг с другом линиями связи 10. Каждый концентратор связан по крайней мере с одной ЦС. Связь между концентратором и ЦС двунаправлена. ЦС передает на приемные устройства команды, устанавливающие режим работы приемных устройств и концентраторов. Команды ЦС концентратору устанавливают зону охвата каждой ЦС, т.е. соответствие между номерами приемных устройств и номерами "заинтересованных" ЦС. Приемные устройства могут переводится по команде ЦС в штатный режим работы, режим определения координат приемных устройств после развертывания системы, режим определения координат постановщика помех. В штатном режиме работы команды ЦС устанавливают для каждого приемного устройства оптимальный поток сообщений абонентов, проходящих порог селекции. Благодаря предложенному нами способу размещения приемных устройств и способу амплитудной селекции не требуется передачи абонентам какой-либо информации, обеспечивающей многоканальность, и все абоненты системы могут работать в одном частотном канале и передавать сообщения в произвольные моменты времени, т.е. система является полностью стохастической.
ЦС производит идентификацию абонента, и в случае, если абонент - подвижный объект, определяет его координаты. ЦС также устанавливает конечного получателя сообщения абонента (пользователя 12) и передает в его распоряжение всю полученную информацию. Одновременно с определением координат ЦС производит тестирование приемных устройств и устанавливает для каждого приемного устройства минимальный поток сообщений, проходящих порог селекции, при котором коэффициент готовности системы находится на заданном уровне.
Приемные устройства системы могут иметь разъемы 17 для подключения различных внешних устройств, например светофора 18, устройства для обслуживания кредитных карточек 19. В этом случае обеспечивается двусторонняя проводная связь между внешним устройством и ЦС.
Фиг. 3. Определение координат гиперболическим методом.
ПО находится в точке с заранее неизвестными координатами  и в заранее неизвестный момент времени t0 излучает фронт сферической радиоволны. Имеется 4 приемных устройства, координаты антенн которых
и в заранее неизвестный момент времени t0 излучает фронт сферической радиоволны. Имеется 4 приемных устройства, координаты антенн которых 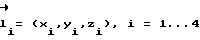 известны с высокой степенью точности. Каждое из этих устройств определяет время поступления фронта сферической радиоволны ПО на свою антенну в некоторой произвольной, но одинаковой для всех устройств временной шкале.
известны с высокой степенью точности. Каждое из этих устройств определяет время поступления фронта сферической радиоволны ПО на свою антенну в некоторой произвольной, но одинаковой для всех устройств временной шкале.
Li - расстояние между i-ым приемным устройством и ПО, 
Фиг. 4, 5. Распространение радиоволн при наличии отражающих поверхностей. Для волн дециметрового диапазона бетонные перекрытия, кирпичная кладка, конструкции из дерева и стекла, грунт, пресная и морская вода могут рассматриваться как идеальные диэлектрики.
При отражении радиоволн от местных предметов (стен зданий, мостовых, газонов и пр.) происходит как диффузное рассеяннее, так и направленное отражение. Диффузным рассеянием можно пренебречь, т.к. шероховатость отражающих поверхностей мала по сравнению с длинной волны. Характерное значение коэффициента отражения при нормальном падении луча в условиях города находится в пределах 0.6-0.9. Направленное отражение происходит в направлении, предписываемом геометрической оптикой. Если считать отражающие поверхности плоскими, то при наличии источника сигнала f полная картина электромагнитного поля может быть получена при учете мнимых изображений источника f', f'', f''', f(4), а также многочисленных изображений мнимых источников (для простоты на рисунке не показаны). Все изображения источников работают синхронно с f. Сигнал от каждого мнимого изображения распространяется в телесном угле, натянутом на отражающую поверхность. На рисунке показан телесный угол, в пределах которого распространяется сигнал источника f'' (фиг. 4 - вид сверху, фиг. 5 - вид сбоку в направлении стрелки A).
Фиг. 6. Пояснение к способу, позволяющему по мысли автора патента WO 93/04453 вычислить время поступления фронта импульса ПО, находящегося вне зоны прямой видимости со стороны антенны приемного устройства 1 в точке 2, которое имело бы место при отсутствии здания 20.
Пусть ПО переместился из точки 1 в точку 2. В этом случае произойдет увеличение длительности импульса из-за появления прямого луча. Мы заменили "кривой" сигнал на "прямой". Если приложить к указанной ситуации способ, предложенный в патенте, мы придем к выводу, что "кривой" сигнал заменен на еще более "кривой".
Фиг. 7. На электронной таблице представлены результаты решения задач определения координат гиперболическим методом (п.2.3).
Фиг. 8, 9. Способ размещения приемных антенн МПРЛС.
Условие хорошей видимости территории со стороны антенн МПРЛС полностью равносильно условию хорошей видимости антенн МПРЛС со стороны любой точки территории.
Антенны МПРЛС как бы обозначают габариты здания.
В предпочтительном варианте антенна прикрепляется непосредственно к корпусу приемного устройства. Корпус приемного устройства имеет кронштейн для крепления к крыше здания. Вылет антенны за пределы горизонтальных габаритов здания составляет (0.5-1) м. На рисунке показана горизонтально расположенная антенна для приема последовательности синхронизирующих импульсов с геостационарного искусственного спутника земли и вертикально расположенная антенна для приема сообщений абонентов.
Фиг. 10. Схематический план участка территории г. Москвы, прилегающий к ул. Усиевича на участке от д. 10а до д. 2.
Фиг. 11. На рисунке показан участок городской территории (вид сверху). Угловые точки зданий оборудованы приемными устройствами МПРЛС, для наглядности на рисунке показано только 7 таких устройств.
На рисунке показана картина распространения волновых фронтов, которая имела бы место в случае, если бы приемные устройства МПРЛС были бы заменены на передающие, а в распоряжении абонента имелся бы приемник, а не передатчик. Вследствие обратимости хода лучей рассматриваемая задача полностью равносильна исходной.
Рисунок представляет собой результат решения на ЭВМ задачи определения координат абонента способом, предложенным в настоящем патенте. Определение координат проводилось в предположении, что имеется не менее 5 прямых сигналов абонента, принятых МПРЛС, а СКО ошибки определения времени поступления фронтов прямых сигналов составляет 20 нс (6м).
Вычисленное местоположение абонента показано знаком "+". В этой точке сигнал 5 имеет отрицательную невязку, а остальные сигналы - положительную.
Фиг. 12. Для любой точки заштрихованной области невязки по всем сигналам положительны. Предполагается, что угловые точки зданий оборудованы приемными устройствами. Для простоты показаны только волновые фронты, соответствующие прямым лучам.
Фиг. 13. Координаты приемных устройств (см. фиг. 10) и пример исходных данных для расчета.
Фиг. 14-27. Результаты математического моделирования задач определения координат (к п.3.3).
Фиг. 28,29. Увеличение длительности импульса при его распространении в условиях города из-за многолучевого распространения.
Фиг. 30-33. Искажение сигнала из-за многолучевого характера распространения в условиях города и способ оценки амплитуды сигнала.
На рисунке приведены огибающие радиоимпульсов: фиг. 30 - исходного и фиг. 31 - 33 - принятых приемными устройствами, размещенных в различных точках территории города. Предполагается, что сигналы принимаются устройствами, имеющими широкую полосу пропускания. Кроме того, предполагается, что передатчик абонента имеет высокую скорость роста амплитуды выходного сигнала (см. фиг. 39).
На рисунке показан также некоторый порог селекции U-. Если в качестве оценки амплитуды импульса использовать ее максимальное значение UMAX (импульс в)), то возникает неточность в оценке амплитуды из-за наличия на входе приемного устройства множества сигналов, имеющих случайную амплитуду и фазу. В качестве оценки амплитуды сигнала разумно использовать максимальное значение производной огибающей по времени. В этом случае миниминизируются эффекты, связанные с многолучевым распространением.
Фиг. 34. Диаграмма направленности передающей антенны, установленной над поверхностью идеального диэлектрика.
Фиг. 35-38. Селекция и оценка амплитуды сигналов.
На рисунке показаны входные цепи приемного устройства.
Если к колебательному контору приложено напряжение U = U0•sinωt, то напряжение на конденсаторе контура растет по закону UC= U0•Q•(1-exp(-ωt/2Q))•sin(ωt+α). Стационарное значение амплитуды вынужденных колебаний при t _→ ∞ составляет U0•Q. Можно показать, что при использовании квадратичного детектора на выходе дифференцирующей цепи получим импульс, максимальная амплитуда которого пропорциональна U
Фиг. 39. Форма импульса на выходе передатчика в случае, если в качестве выходного каскада использован широкополосный усилитель мощности.
Фиг. 40. Форма импульса на выходе передатчика, неприемлемая для решения задач определения координат с высокой точностью.
Фиг. 41. Участок транспортной магистрали с предельно высокой интенсивностью движения.
Движение производится в 6 рядов в каждом направлении. На каждый автомобиль приходится 10 погонных метров ряда (линейная плотность 1200 км-1). Каждый автомобиль оснащен УВ и передает сообщение на ЦС один раз в десять секунд.
Приемные устройства расположены с интервалом 50 м с обеих сторон магистрали.
На рисунке показана зона ответственности приемного устройства 1 (двойная штриховка) и зона конфликта (ординарная штриховка). Зона ответственности содержит ≈ 360 автомобилей, зона конфликта ≈ 1000. Амплитуда сообщения абонента, находящегося на границе зоны конфликта (точка 3), по крайней мере втрое ниже амплитуды сообщения абонента, находящегося на границе зоны ответственности (точка 2). По этой причине, если порог селекции приемного устройства 1 установлен таким образом, что приемное устройство принимает каждую секунду 100 сообщений, в число принятых сообщений заведомо попадут сообщения от всех абонентов, находящихся в зоне ответственности.
Фиг. 42. Последовательность коротких прямоугольных импульсов без высокочастотного заполнения, которые могут быть использованы для передачи сообщений.
Фиг. 43. Кодирование сообщения в виде последовательности волновых цугов.
Фиг. 44. Функциональная схема УВ в простейшем варианте.
Фиг. 45. Функциональная схема УВ в предпочтительном варианте.
Фиг. 46. Последовательности синхронизирующих импульсов (временных меток).
Фиг. 47. Функциональная схема приемного устройства МПРЛС (станции).
Фиг. 48. Синхронизация генератора тактовых импульсов (ГТИ).
Фиг. 49. Внешний вид приемного устройства МПРЛС. Антенна 32 предназначена для приема сообщений абонентов, антенна 42 предназначена для приема синхронизирующих импульсов.
Фиг. 50. Определение координат приемных устройств радиолокационными методами при развертывании системы.
Для определения координат приемного устройства 1 вертолет 13 последовательно "зависает" в нескольких точках, координаты которых известны с высокой степенью точности. Вертолет оснащен приемником тактовых импульсов и передатчиком.
Фиг. 51. Функциональная схема концентратора.
Фиг. 52. Использование выделенной телефонной линии для питания приемных устройств и защита приемных устройств от несанкционированного доступа.
Фиг. 53. Функциональная схема специализированного вычислителя (СВ) центральной станции.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ определения плановых координат воздушной цели с помощью многопозиционной радиолокационной системы, встроенной в пространственно-распределенную систему радиопомех | 2023 |
|
RU2810525C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ МОБИЛЬНОГО АБОНЕНТА | 1999 |
|
RU2157548C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ ИСТОЧНИКА РАДИОИЗЛУЧЕНИЯ | 2010 |
|
RU2442184C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ МОБИЛЬНОГО АБОНЕНТА | 2000 |
|
RU2183021C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ ПЕРЕДАТЧИКА МОБИЛЬНЫМ ПЕЛЕНГАТОРОМ | 2006 |
|
RU2316784C1 |
| СПОСОБ И УСТРОЙСТВО ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ ОБЪЕКТОВ ПО ТРЕВОЖНЫМ РАДИОСИГНАЛАМ | 2002 |
|
RU2263323C2 |
| Способ определения координат воздушных целей в многопозиционной радиолокационной системе в условиях малого значения отношения сигнал/шум | 2019 |
|
RU2722209C1 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ РАБОТАЮЩЕЙ РАДИОЛОКАЦИОННОЙ СТАНЦИИ | 2010 |
|
RU2457505C2 |
| СПОСОБ ИДЕНТИФИКАЦИИ И ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ ПОДВИЖНЫХ ОБЪЕКТОВ | 2005 |
|
RU2292056C2 |
| СПОСОБ МНОГОПОЗИЦИОННОГО ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ ДКМВ ПЕРЕДАТЧИКОВ | 2004 |
|
RU2285935C2 |
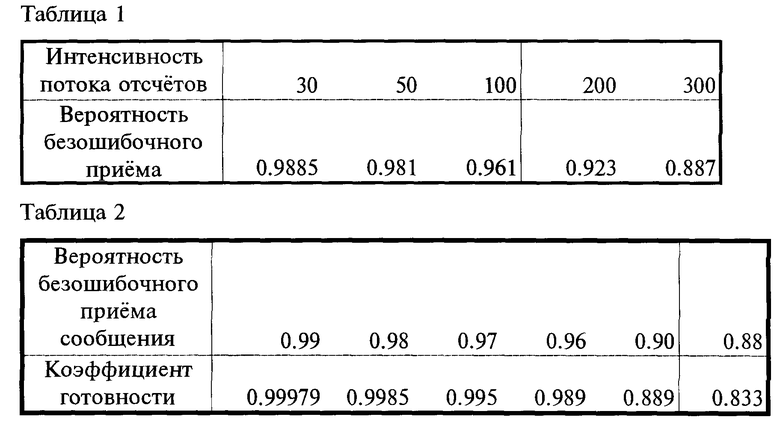
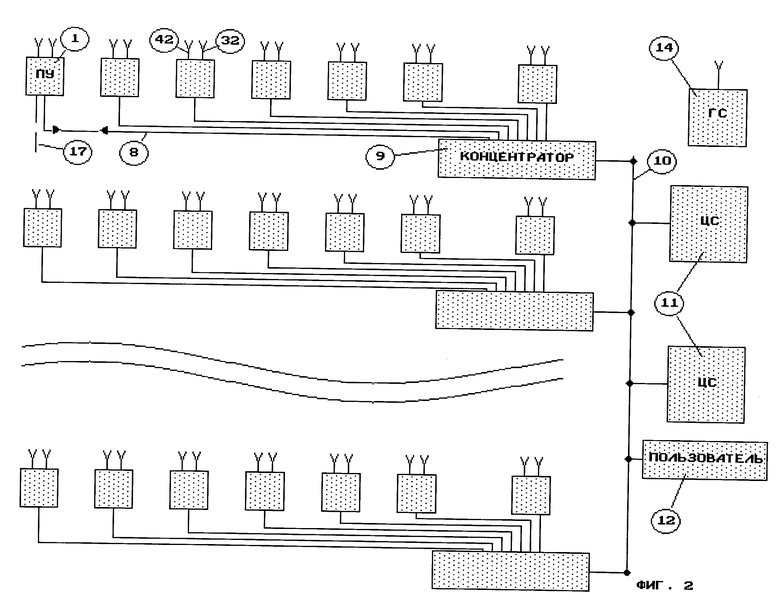
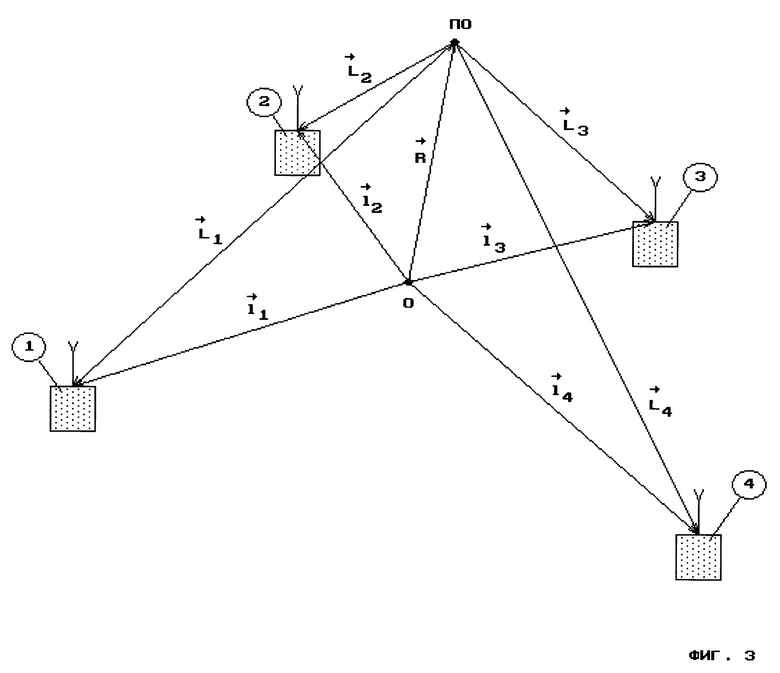
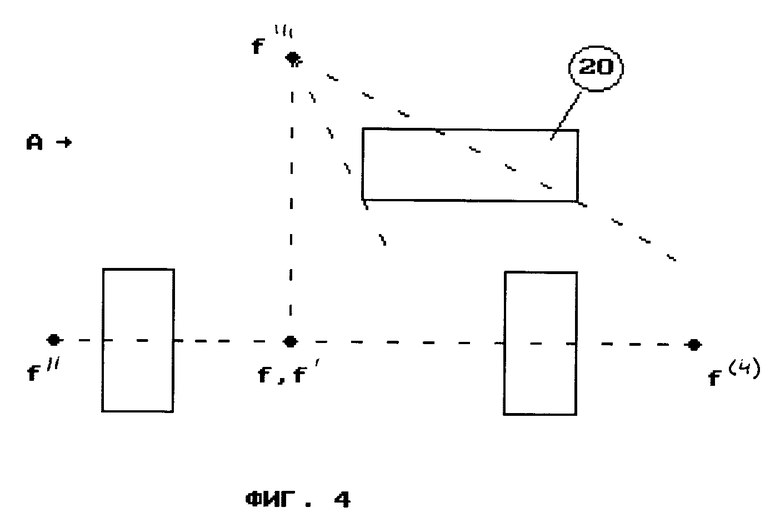
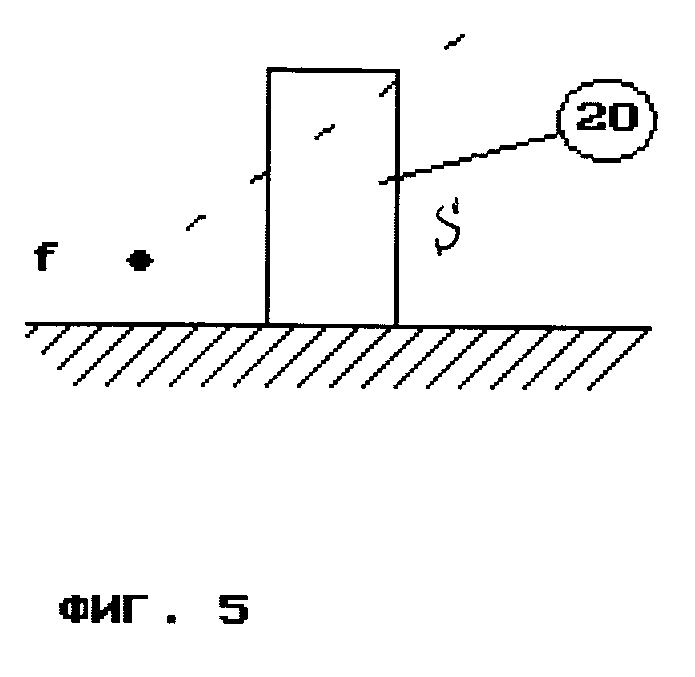

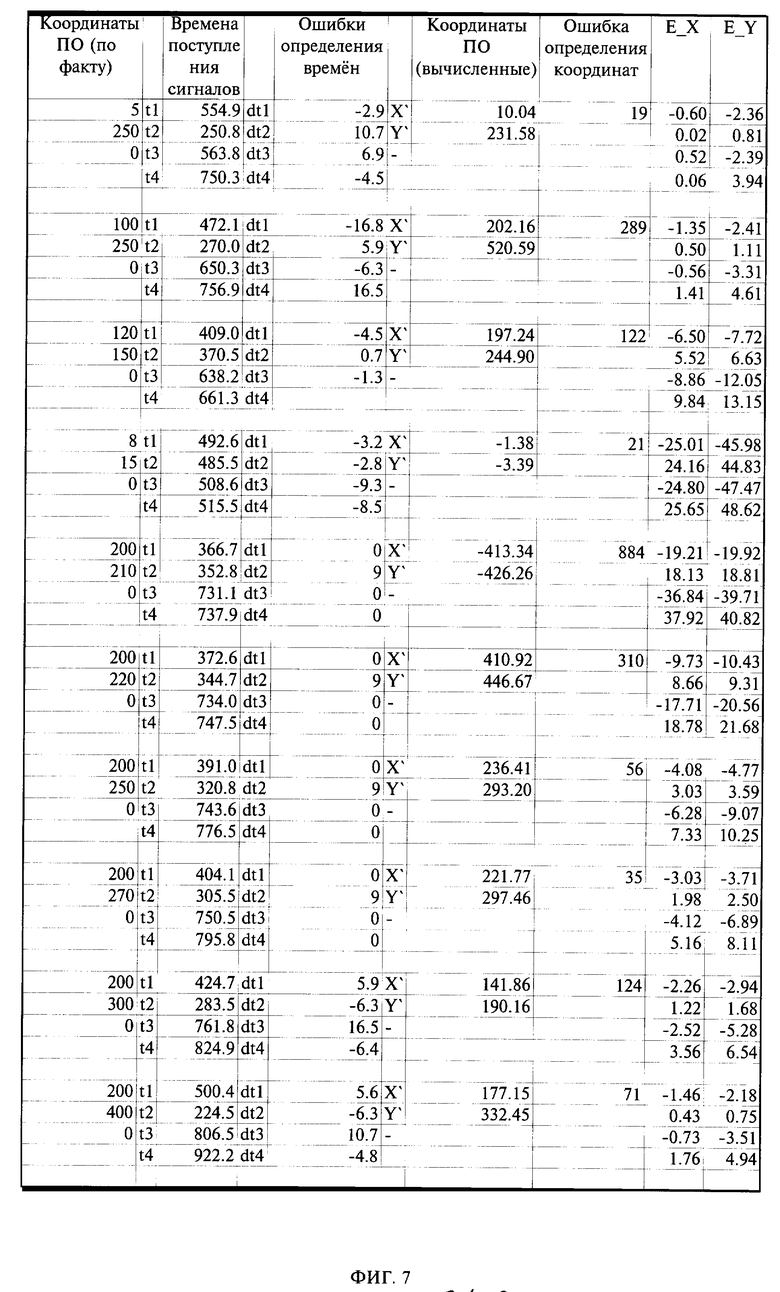
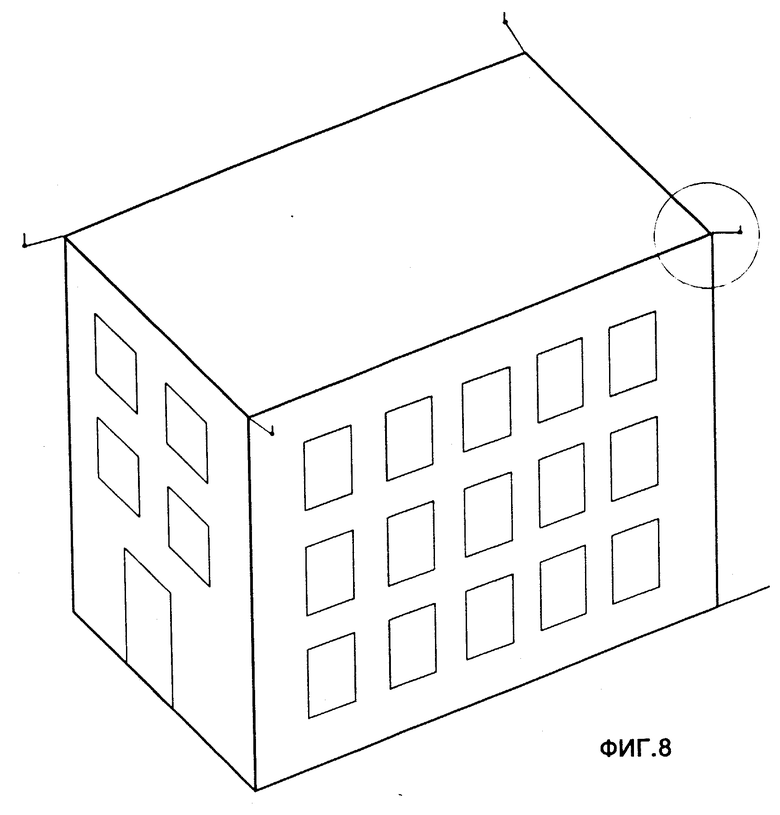
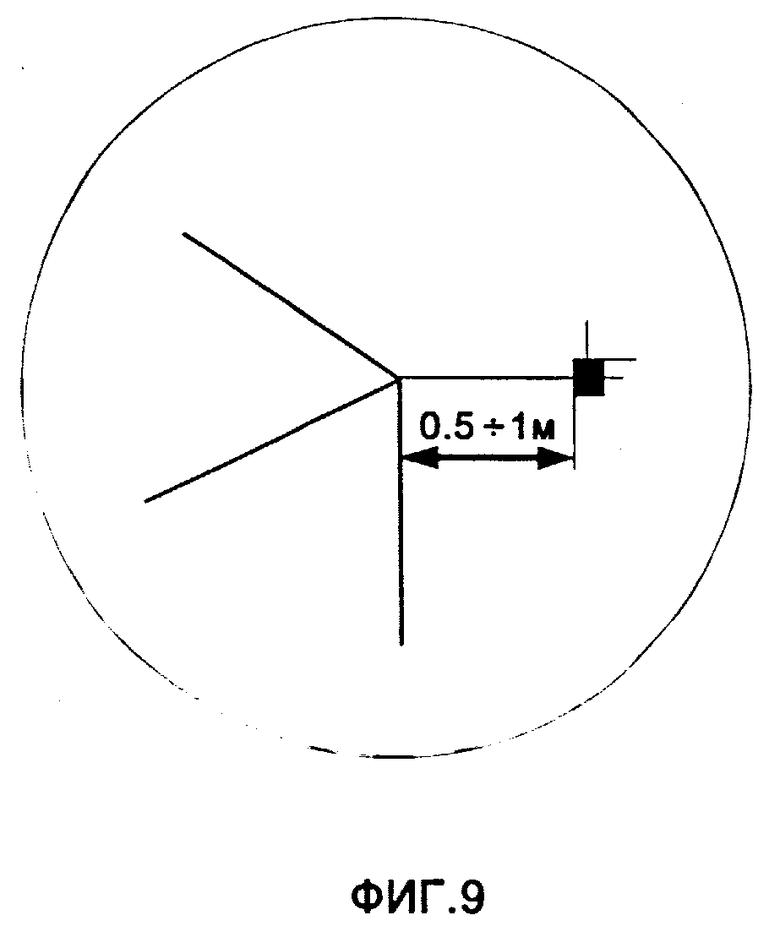
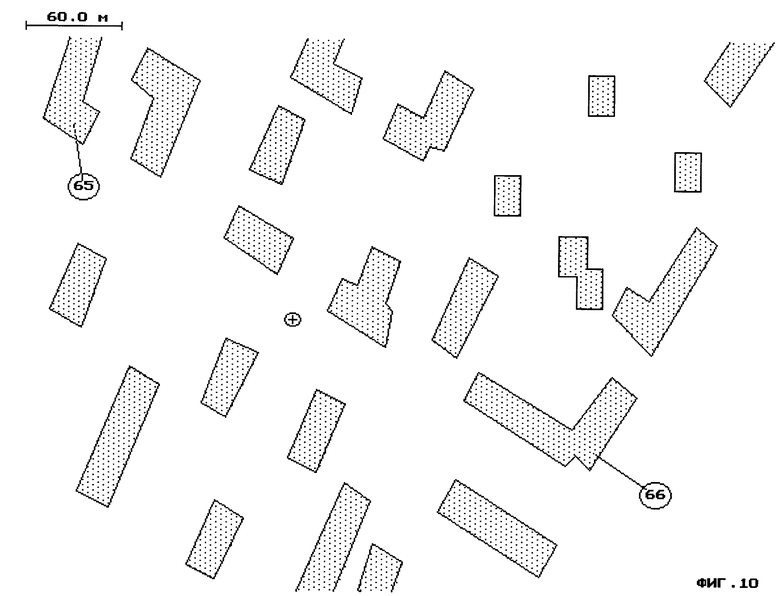
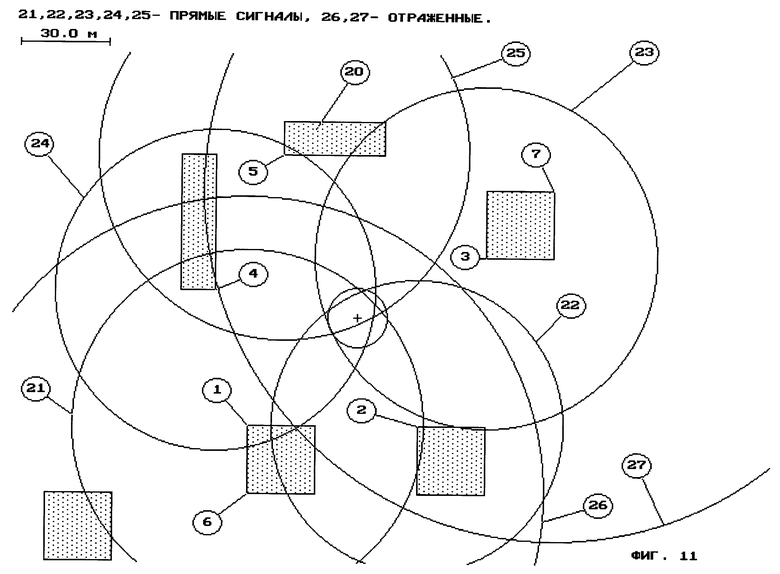
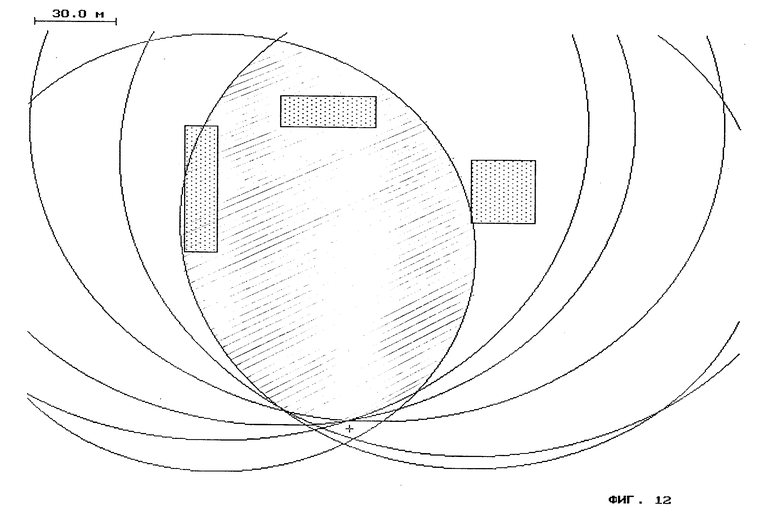
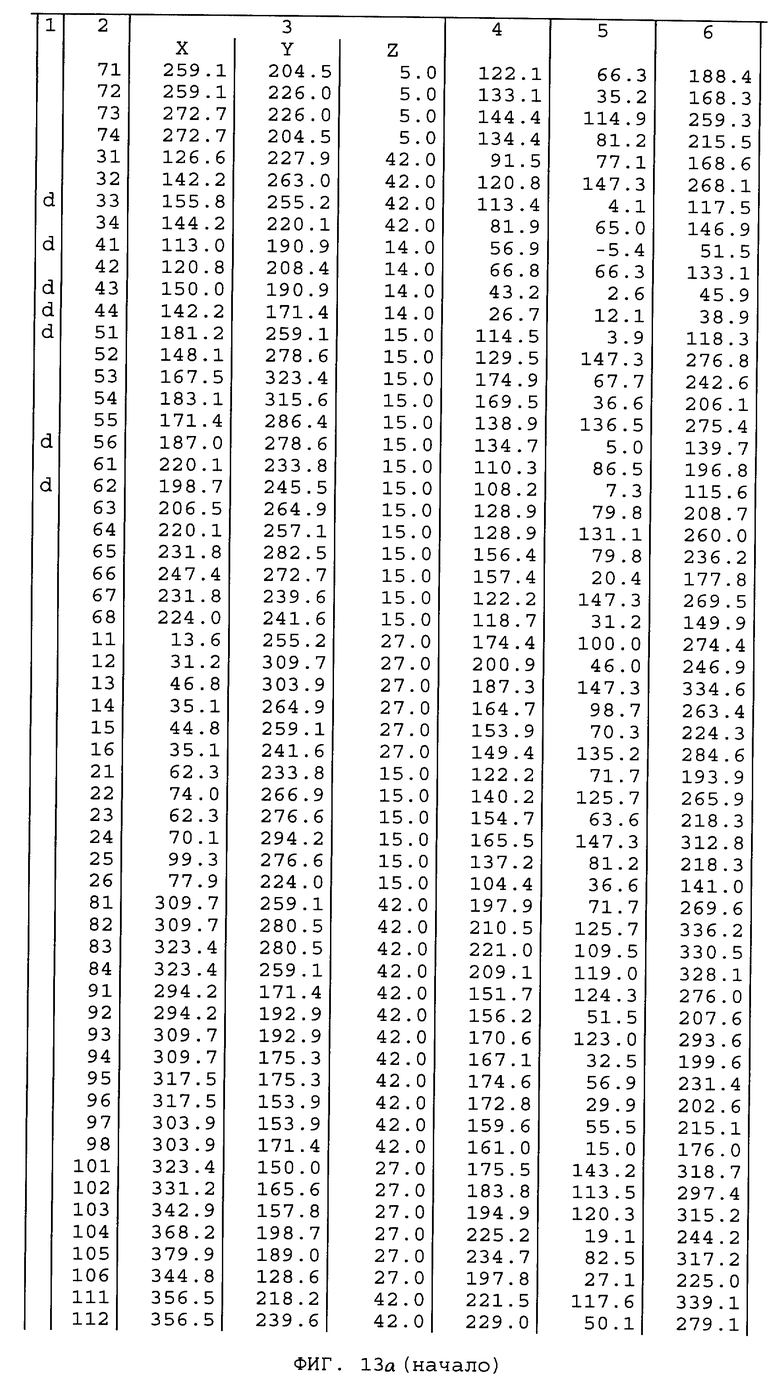
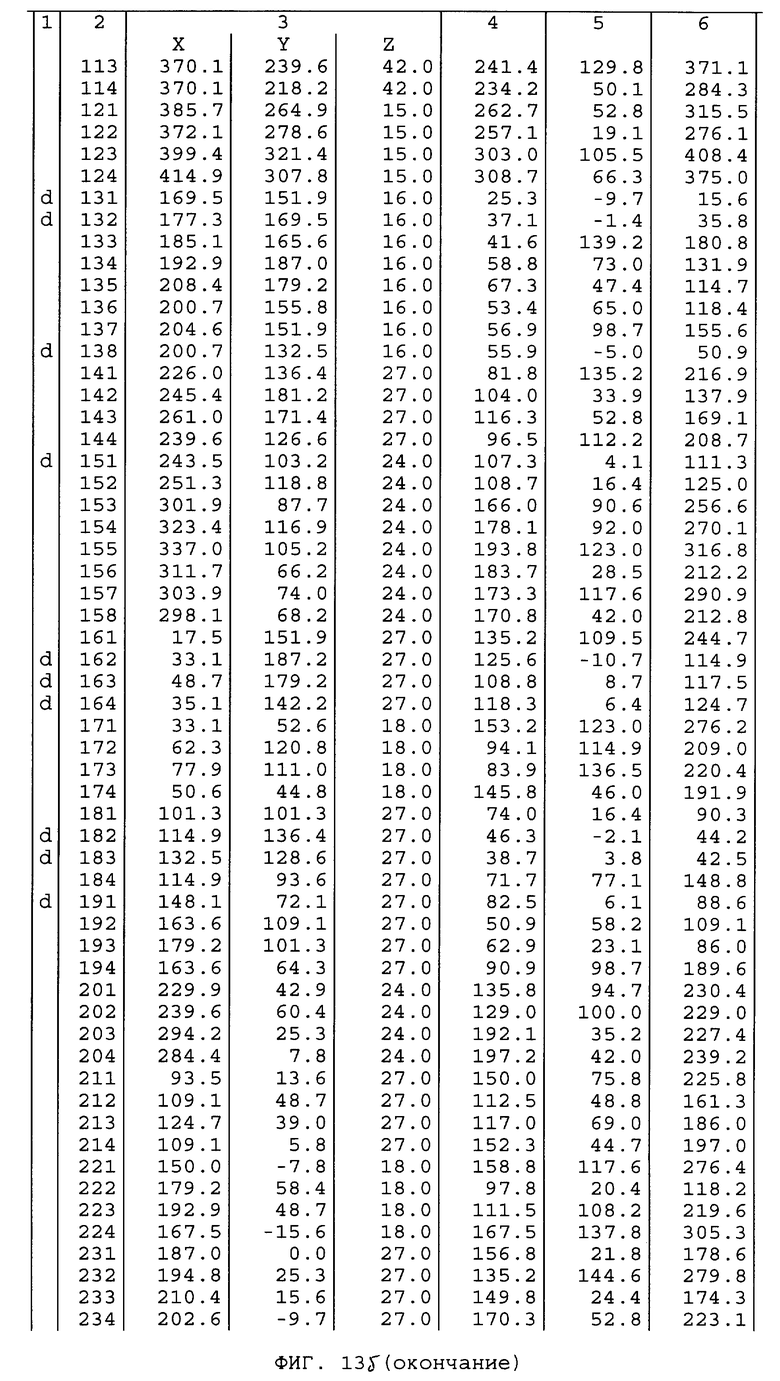
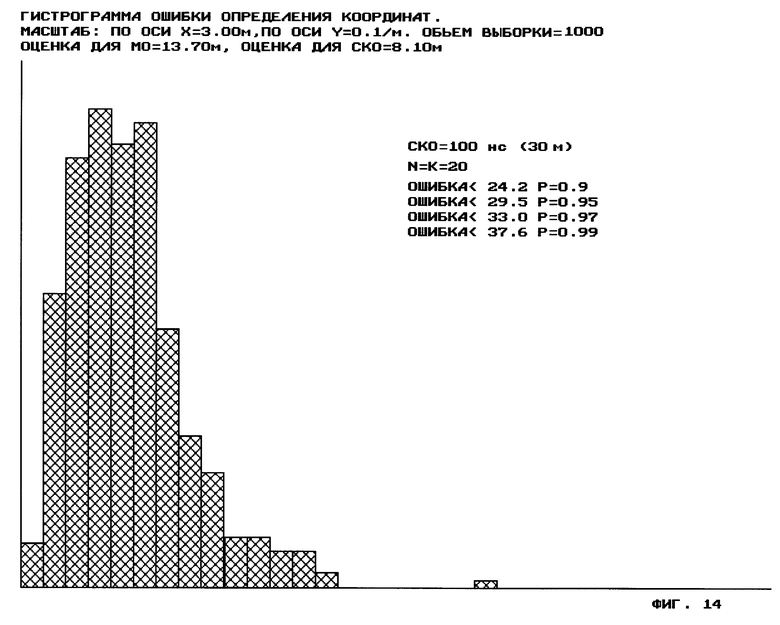
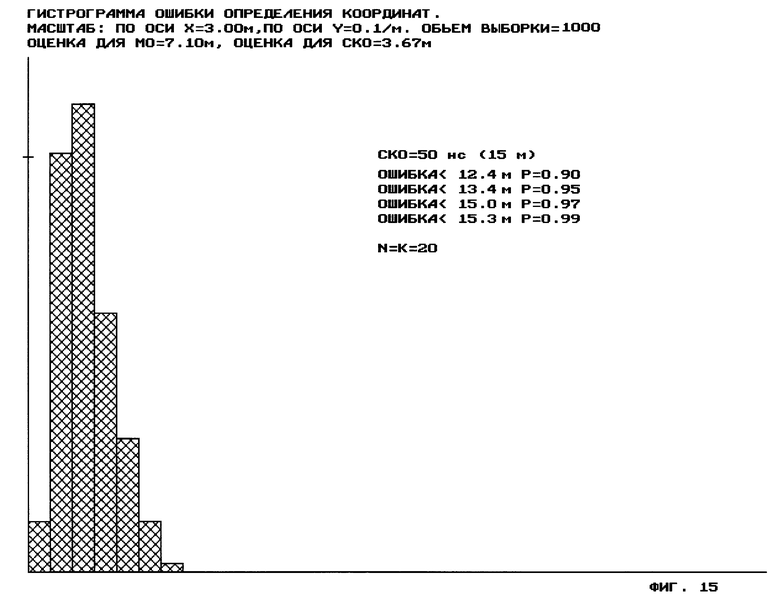
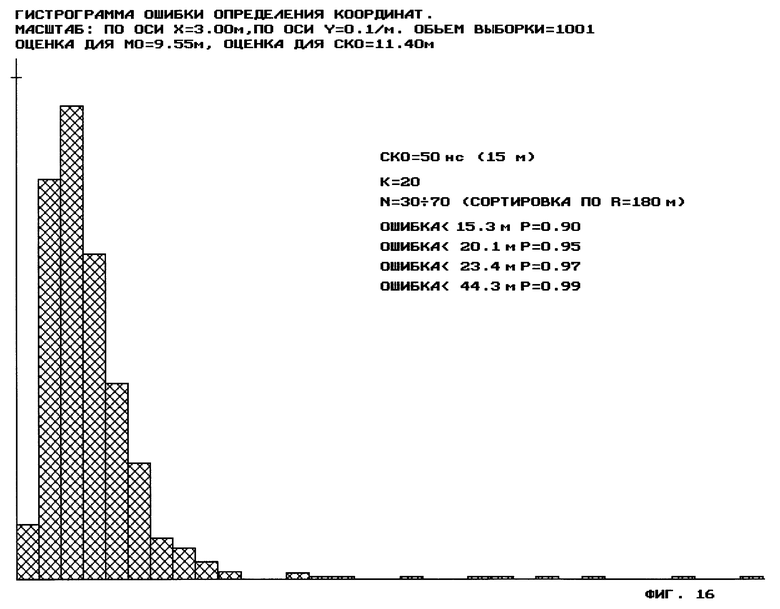
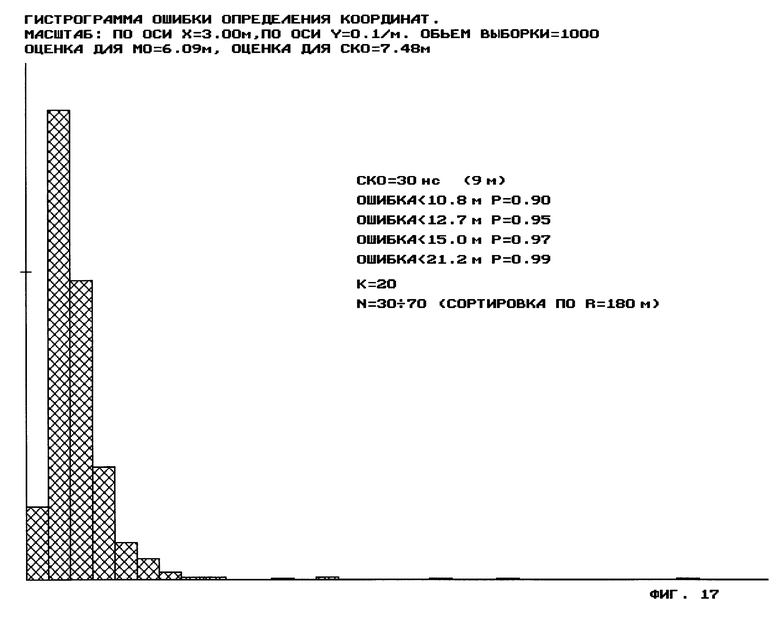

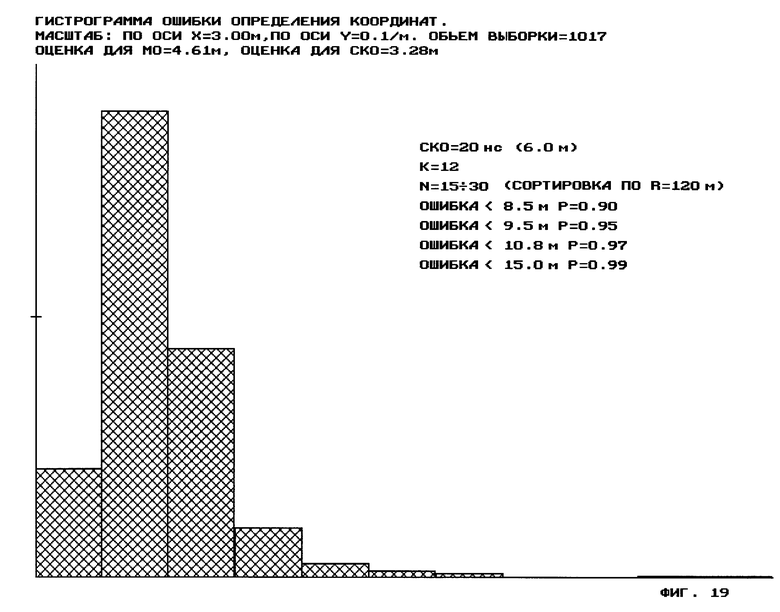
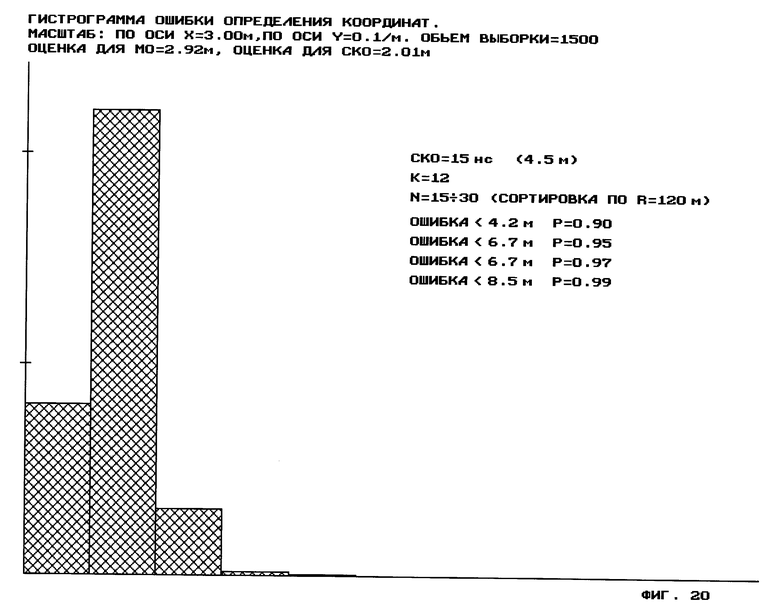
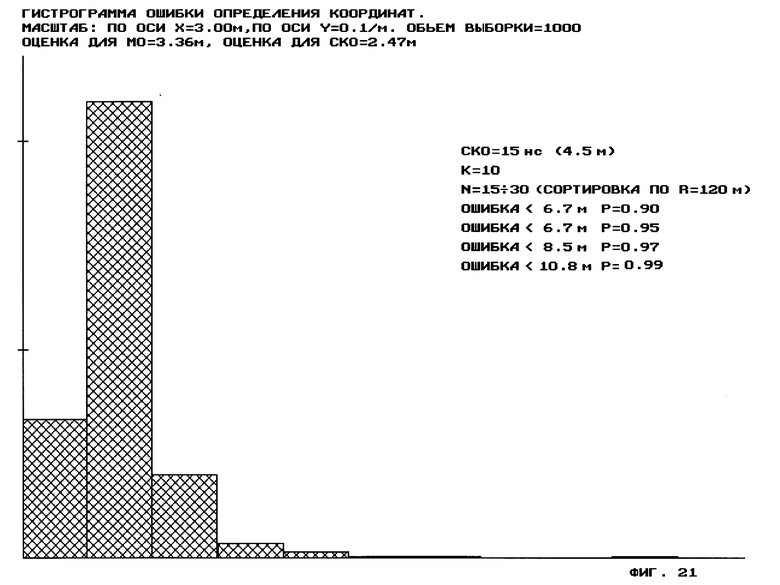
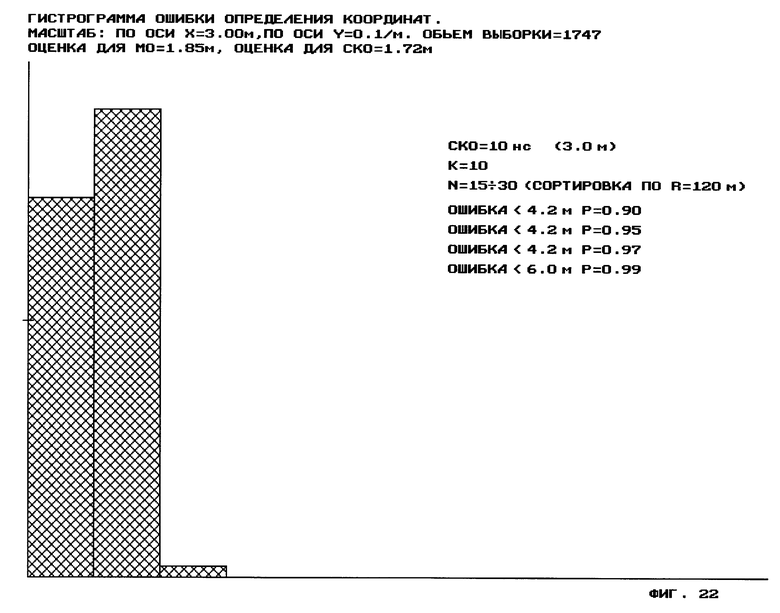
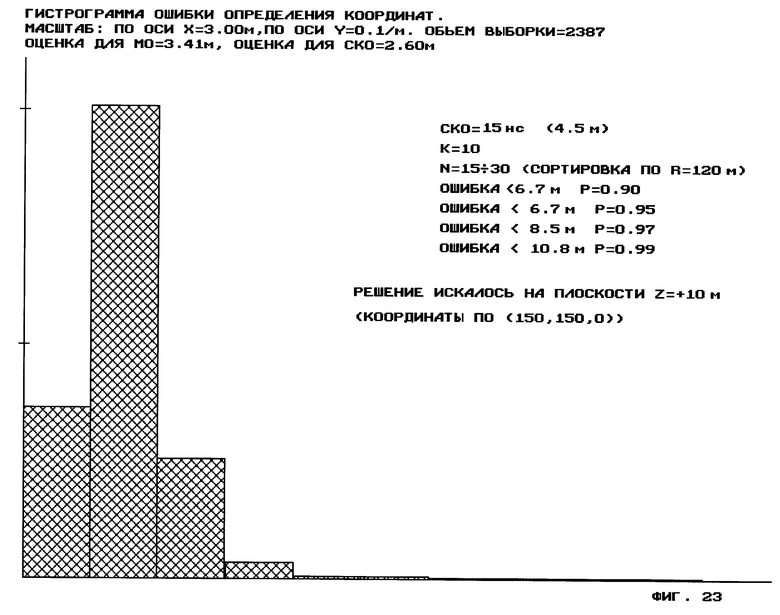
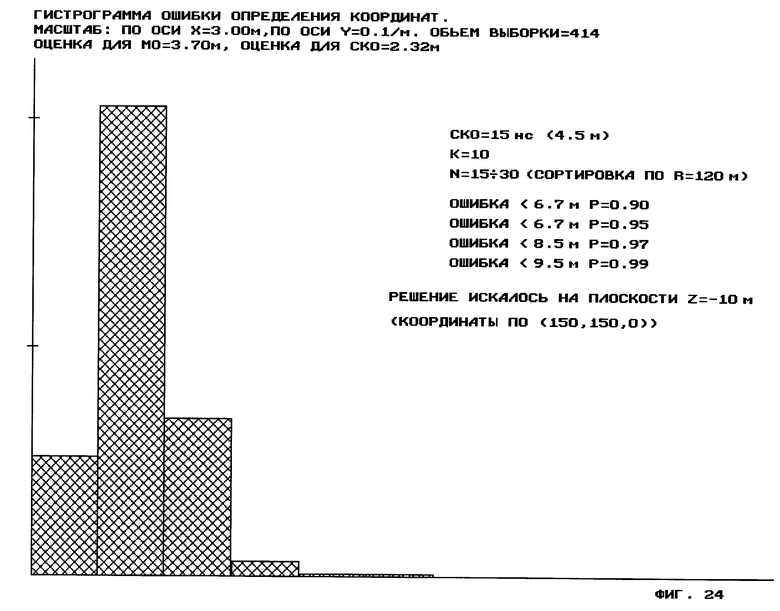
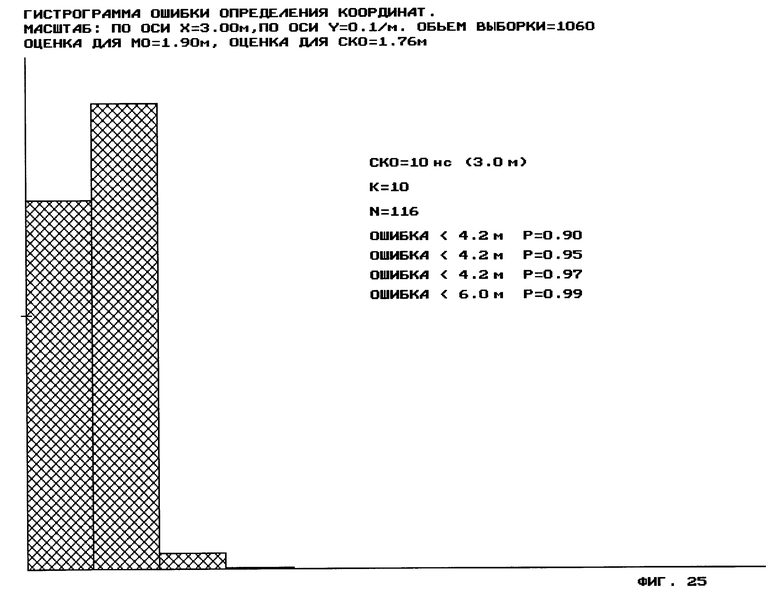
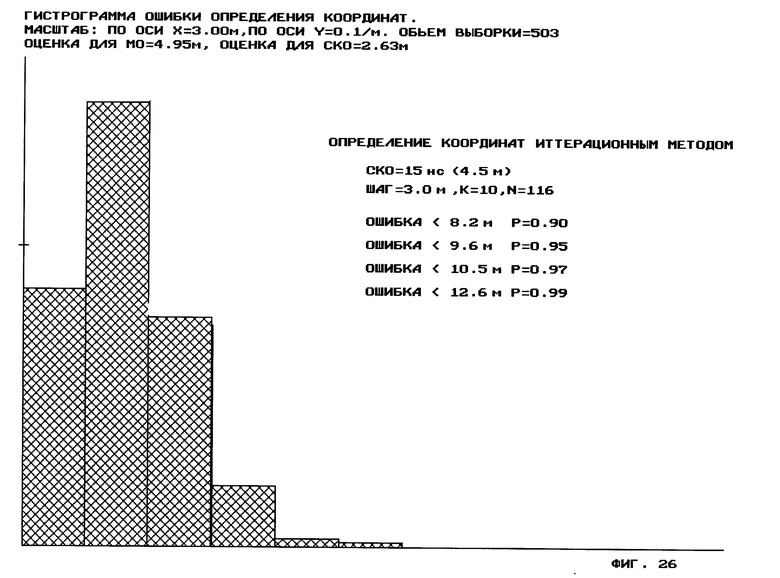

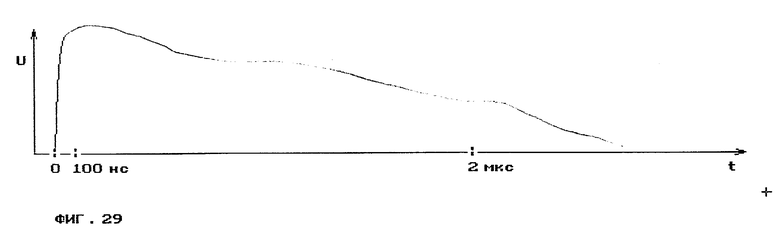
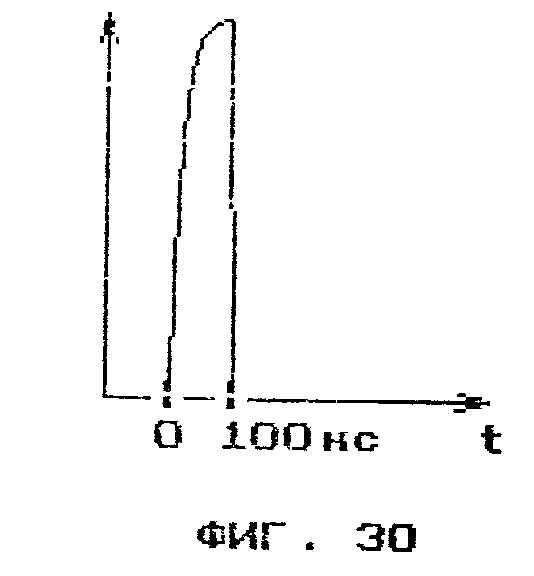
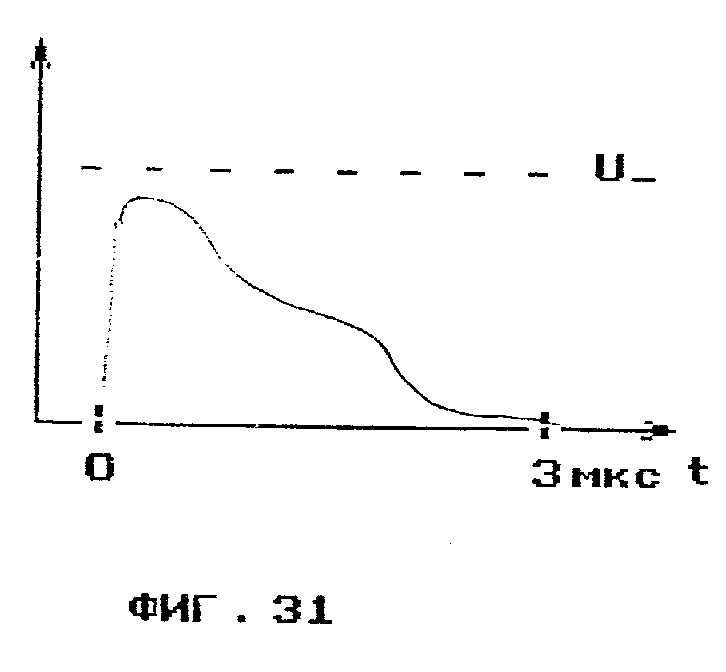
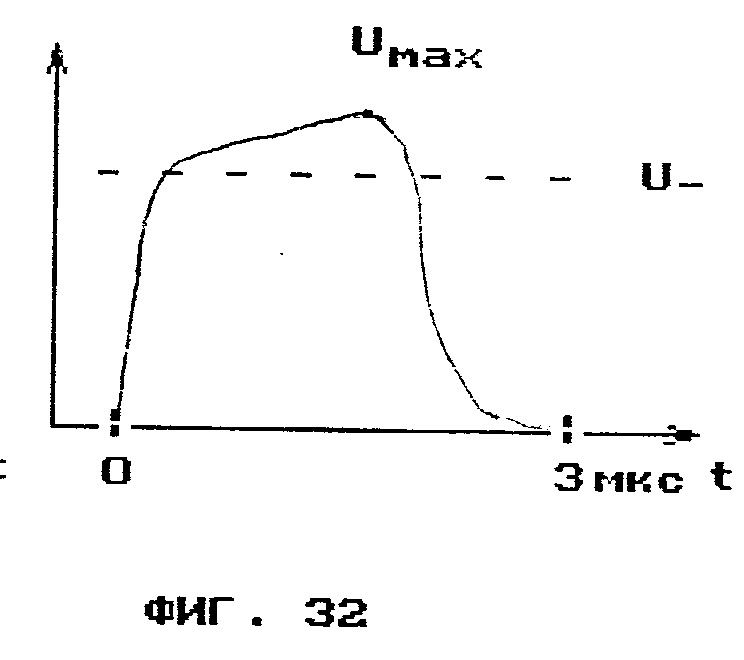
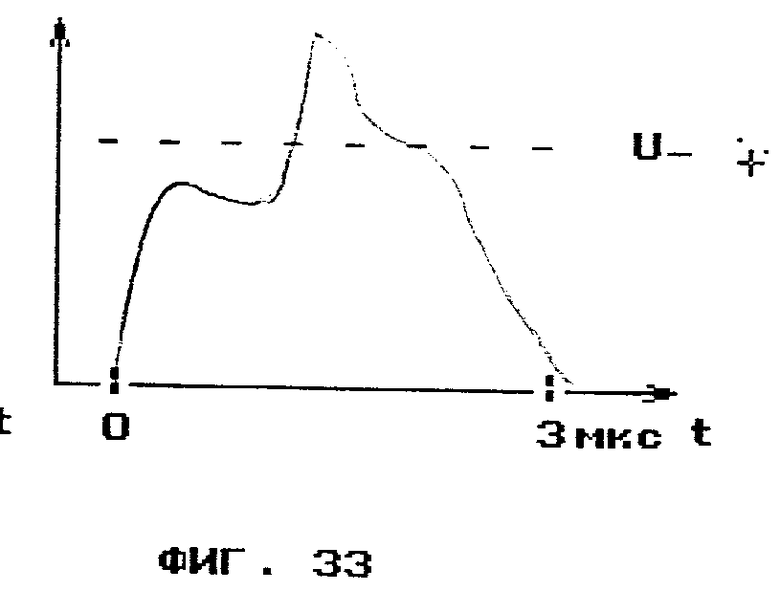
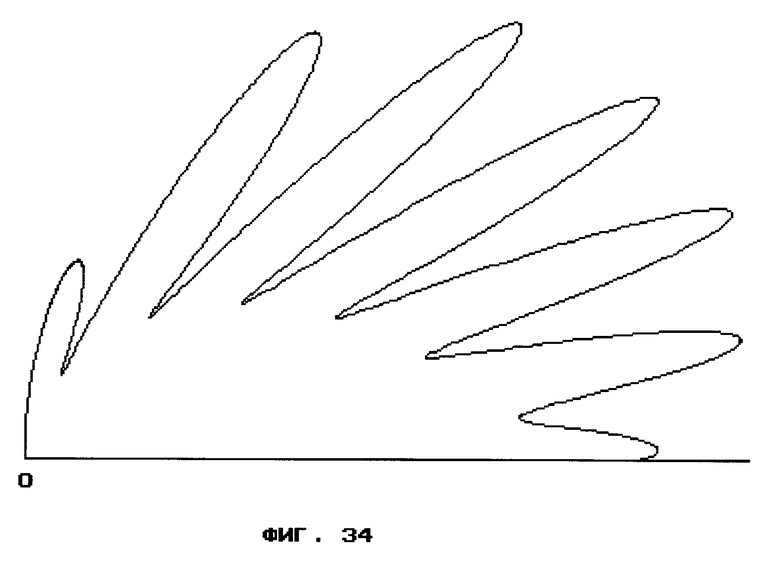
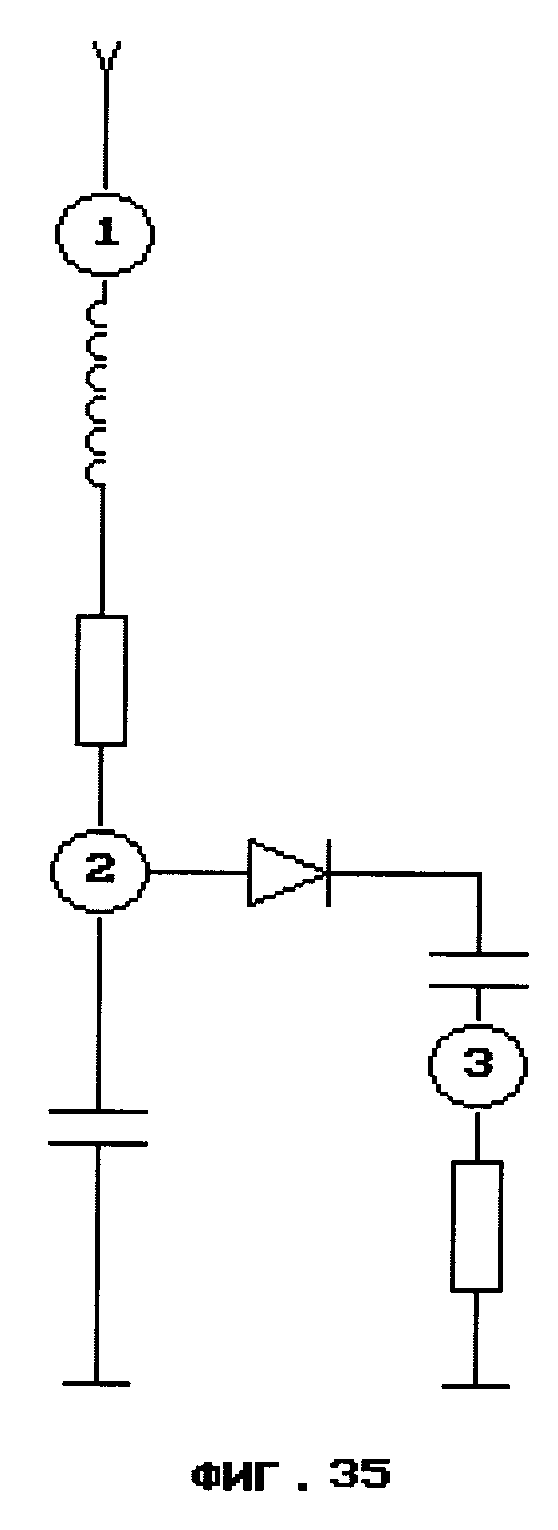
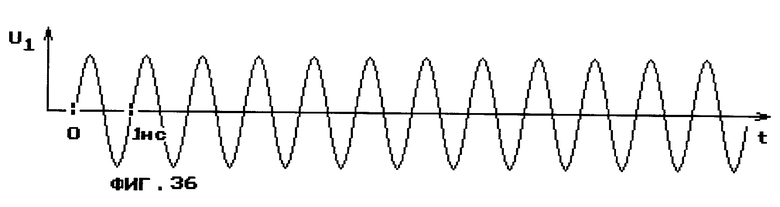
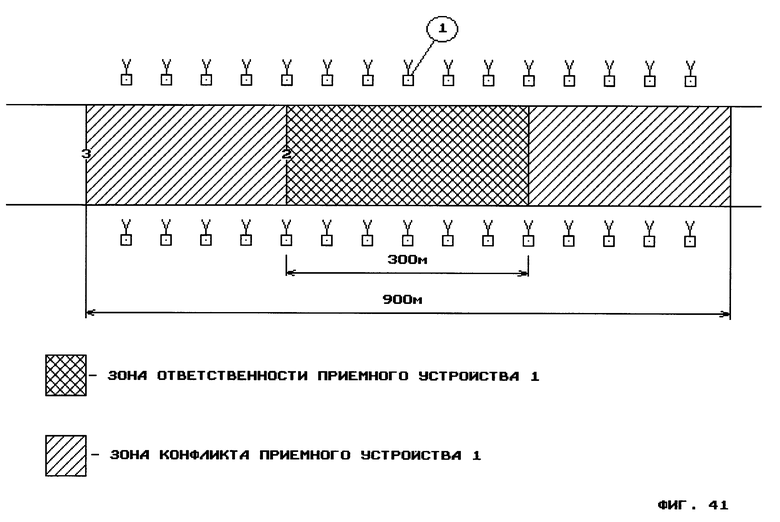

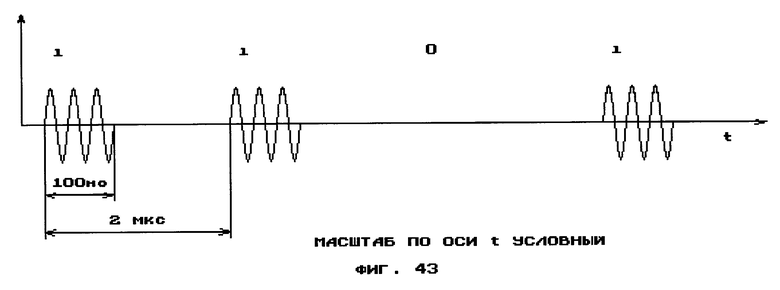
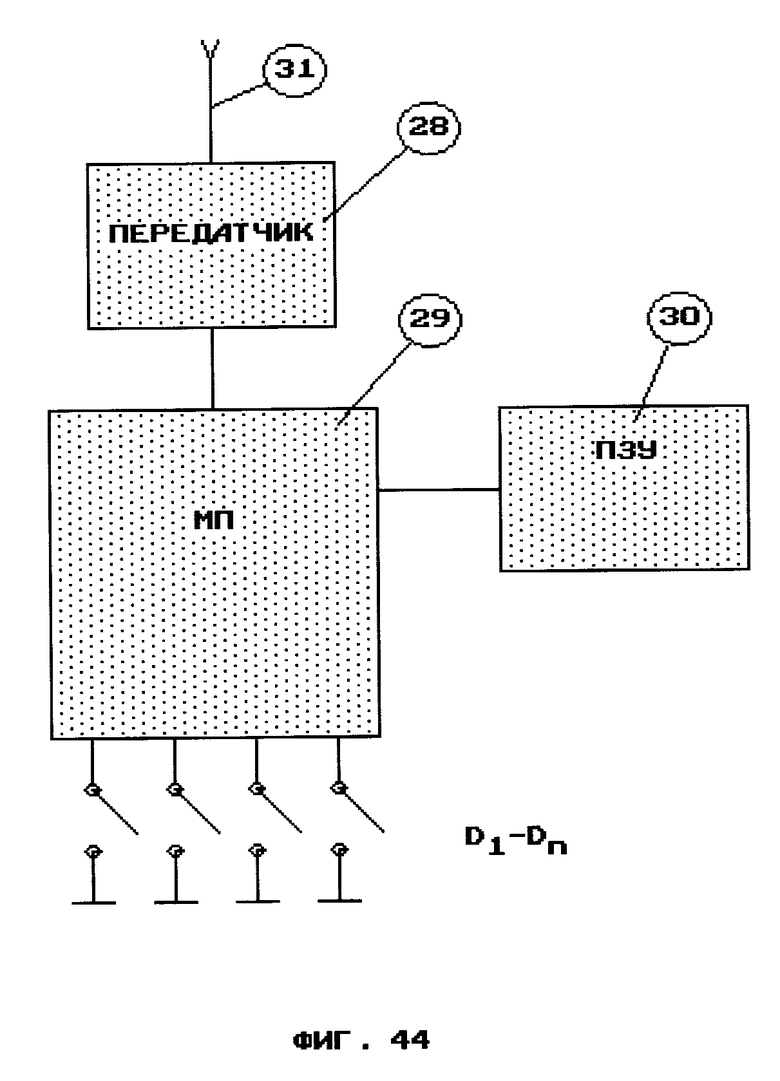

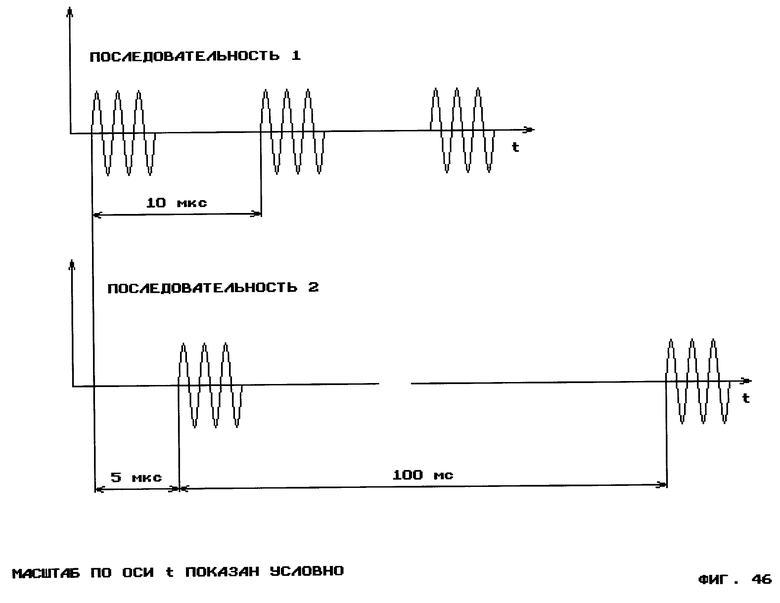
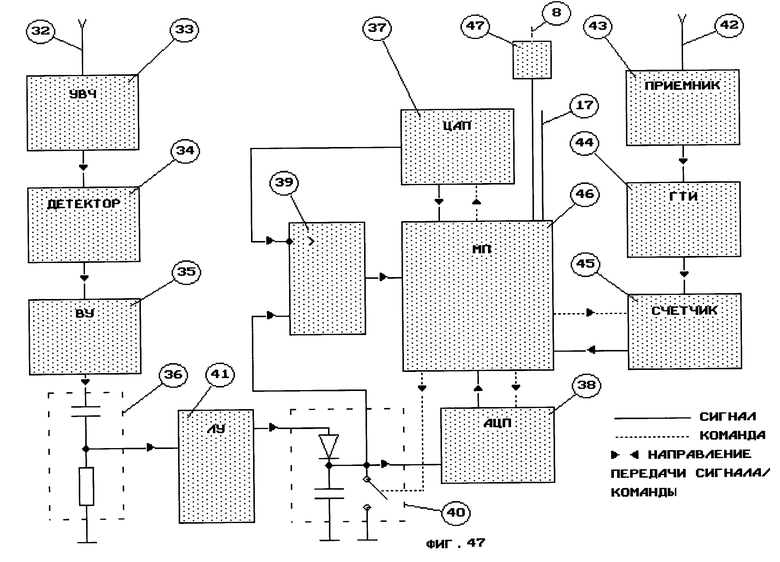
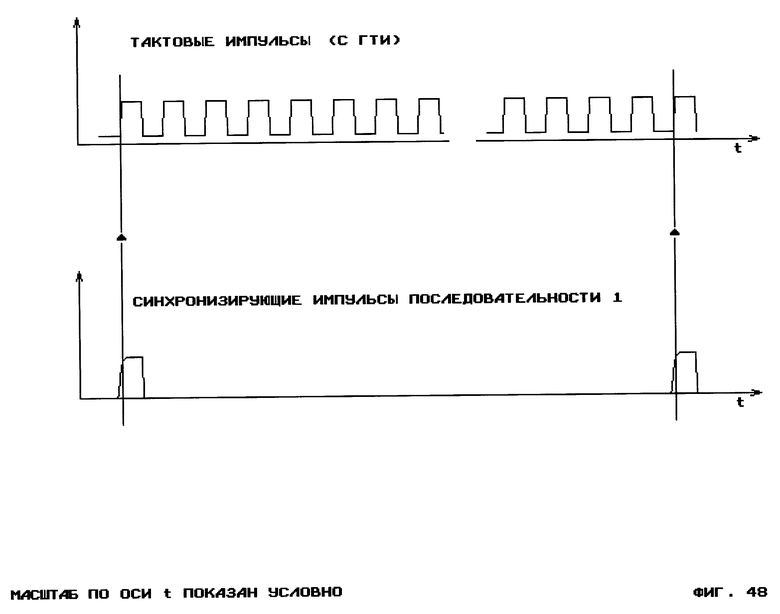

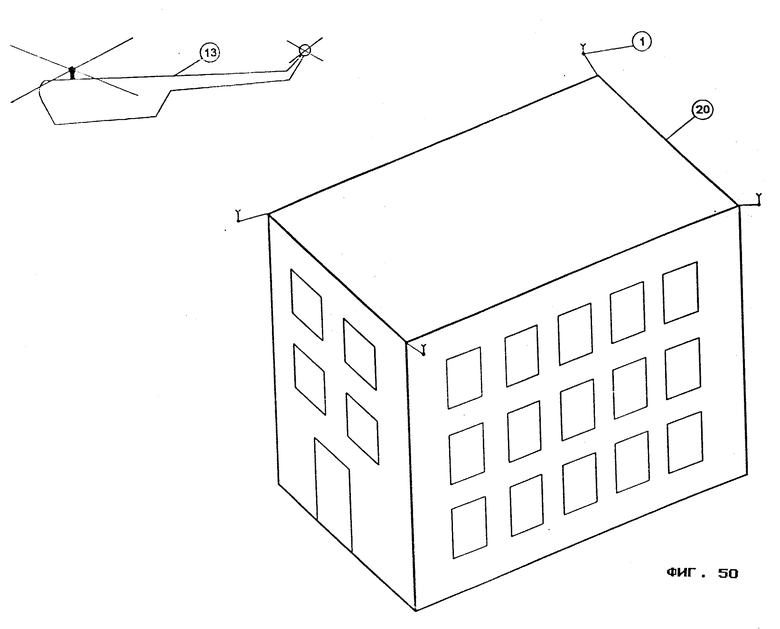
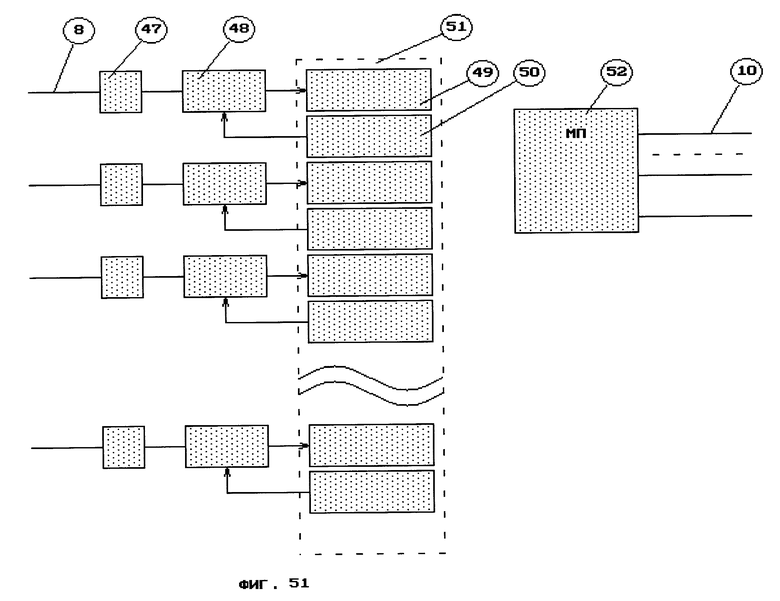
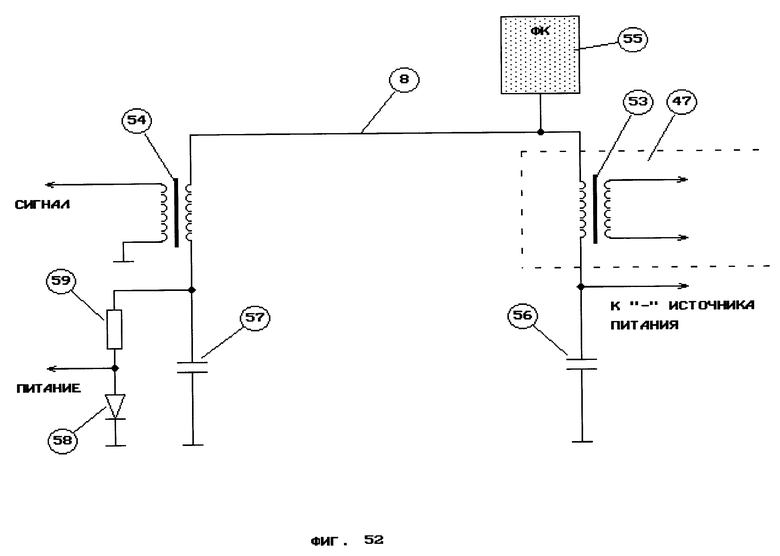
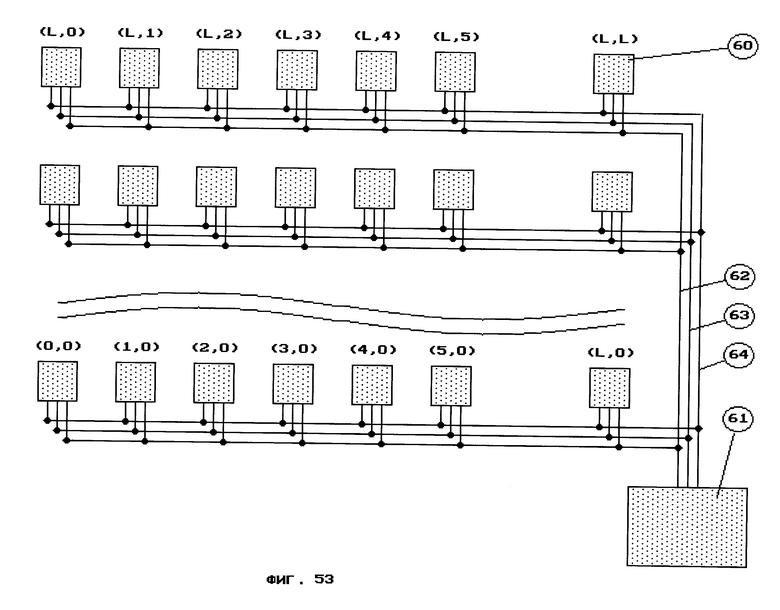
Изобретение относится к радиолокации и радиосвязи с подвижными объектами. Достигаемый технический результат - определение местоположения подвижного объекта (ПО) и передача на него команд по системе связи. Сущность предлагаемого способа определения координат ПО заключается в развертывании сети приемных устройств в необходимом количестве, приеме сигналов ПО и определении их координат. Способ идентификации абонентов и определение их местоположения предусматривает связь ПО с базовыми станциями, определение на центральной станции (ЦС), из какой зоны поступило сообщение при заданной вероятности безошибочного приема. Указанные способы реализуются системой радиосвязи ПО с ЦС, причем предусмотрено размещение приемных устройств на верхних участках зданий обслуживаемой территории при выполнении радиочастотной линии связи между абонентами и базовыми станциями односторонней. 3 с. и 1 з. п. ф-лы, 53 ил., 2 табл.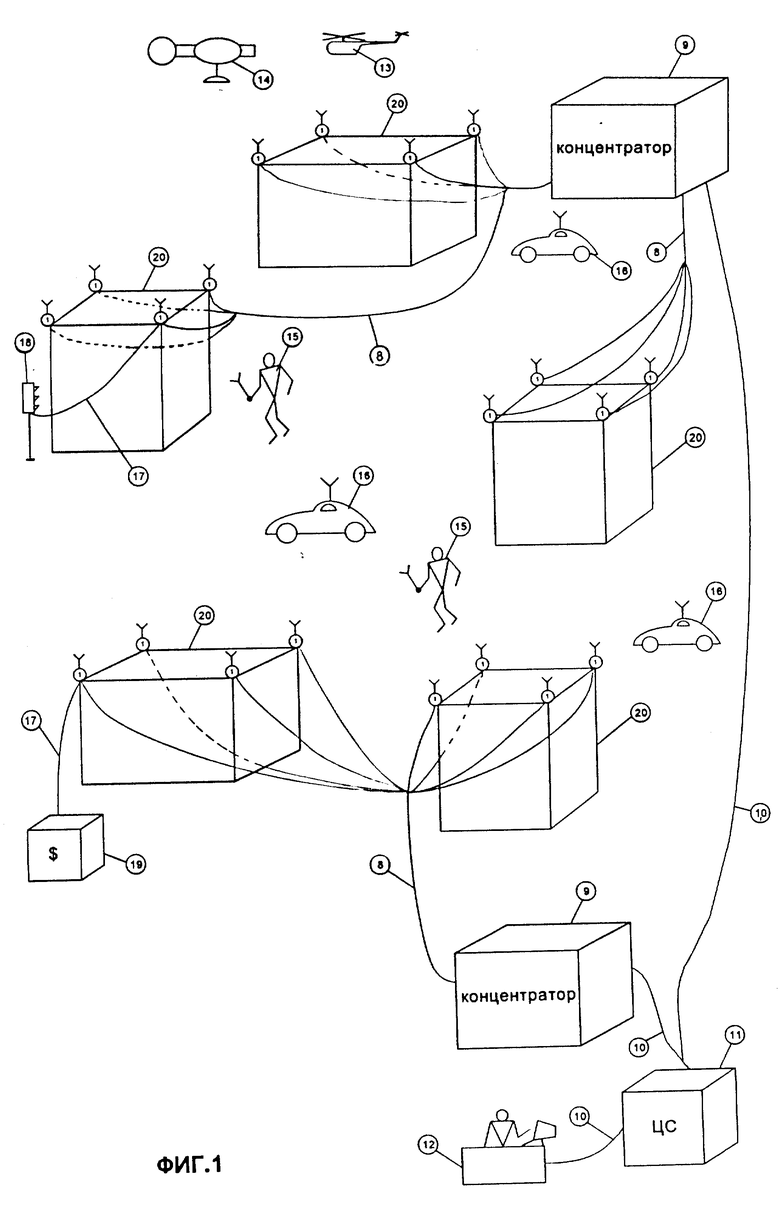
 от точки множества до каждого из приемных устройств, где (xi, yi, zi) - координаты i-го приемного устройства, а (x, y, z) - координаты точки множества, производят сортировку величин ti - Li в порядке их возрастания, определяют приемные устройства, для которых величины ti - Li занимают первые K мест в отсортированном массиве величин ti - Li, а остальные приемные устройства исключают из дальнейшего рассмотрения и вычисляют величину Λ(x,y,z), равную Σ(ti-Li-(1/K)Σ(ti-Li))2, где суммирование производится по номерам приемных устройств, не исключенным из рассмотрения, и для оценки координат ПО выбирают точку дискретного множества, для которой величина Λ(x,y,z) минимальна.
от точки множества до каждого из приемных устройств, где (xi, yi, zi) - координаты i-го приемного устройства, а (x, y, z) - координаты точки множества, производят сортировку величин ti - Li в порядке их возрастания, определяют приемные устройства, для которых величины ti - Li занимают первые K мест в отсортированном массиве величин ti - Li, а остальные приемные устройства исключают из дальнейшего рассмотрения и вычисляют величину Λ(x,y,z), равную Σ(ti-Li-(1/K)Σ(ti-Li))2, где суммирование производится по номерам приемных устройств, не исключенным из рассмотрения, и для оценки координат ПО выбирают точку дискретного множества, для которой величина Λ(x,y,z) минимальна.
| Черняк В.С | |||
| Многопозиционная радиолокация | |||
| - М.: Радио и связь, 1993 | |||
| Связь с подвижными объектами в диапазоне СВЧ | |||
| / Под ред.Джейкса У.К | |||
| - М.: Связь, 1979, с.71 - 101, 455 - 486 | |||
| Домовый номерной фонарь, служащий одновременно для указания названия улицы и номера дома и для освещения прилежащего участка улицы | 1917 |
|
SU93A1 |
| Прибор для очистки паром от сажи дымогарных трубок в паровозных котлах | 1913 |
|
SU95A1 |
| Экономайзер | 0 |
|
SU94A1 |
| 1971 |
|
SU410251A1 | |
| Устройство для чтения плоскопечатного текста слабовидящими | 1973 |
|
SU448015A1 |
| Способ радиосвязи с подвижными объектами в системе связи сотовой структуры | 1989 |
|
SU1626412A1 |
| Система подвижной радиосвязи | 1987 |
|
SU1474860A1 |
| DE 4417779 C1, 07.12.95 | |||
| DE 4411119 C1, 17.08.95 | |||
| US 4292637 A, 29.09.81. | |||
