Предлагаемое изобретение относится к области радиолокации и может быть реализовано в импульсных радиолокационных станциях (РЛС), использующих фазоманипулированные зондирующие сигналы с меняющимися кодами при каждом излучении, для защиты от упреждающих сигналоподобных помех.
Большие проблемы работе РЛС создают импульсные помехи, имитирующие цель, имеющие структуру, близкую к структуре зондирующего сигнала. Для постановщика помех импульсная помеха является наиболее энергетически выгодной. Частным случаем таких помех являются ответные импульсные помехи (ОИП) [1, с. 60], которые излучаются только после приема постановщиком ответной помехи зондирующего сигнала. На экранах РЛС ответные помехи порождают отметки, имитирующие несуществующие цели. Отметки могут быть впереди или сзади реальной цели. Для создания упреждающих отметок время задержки помеховых импульсов имеет порядок периода следования зондирующих импульсов. Задача выделения реальных целей, маскируемых ложными, при действии ОИП, является сложной, так как благодаря идентичности фазовой структуры помехи реальному сигналу отфильтровать ее практически невозможно.
Известен способ защиты РЛС от упреждающих ОИП, заключающийся в перестройке рабочей частоты РЛС от импульса к импульсу по псевдослучайному закону [2, с. 241] Как отмечено в [3], недостатком способа является отсутствие измерения несущей частоты ОИП, что может привести к совпадению несущей частоты помехи с выбранной несущей частотой РЛС. В этом случае ОИП не будет подавлена и окажет мешающее воздействие на обработку сигнала РЛС.
Известен способ защиты РЛС от упреждающих ОИП, заключающийся в вобуляции частоты повторения импульсов [2, с. 243]. Недостатком способа является ограниченность его применения, связанная с возникновением потерь при когерентном накоплении импульсов пачки при межпериодной обработке и сложностью устранения неоднозначности измерения дальности в импульсно-доплеровских РЛС.
Известен способ подавления сигналов, имитирующих цель, для РЛС, использующей сигналы большой длительности с внутриимпульсной модуляцией [4], заключающийся в сжатии сигнала в первом фильтре сжатия после ограничения принятого сигнала, в сравнении уровня сжатого сигнала с первым порогом, сжатии принятого сигнала во втором фильтре сжатия без ограничения принятого сигнала и сравнении уровня сжатого сигнала со вторым порогом, принятии решение об обнаружении цели, если превышены оба порога. Недостаток способа заключается в том, что он не позволяет подавлять сигналы ответной помехи, фазовая структура которых идентична структуре зондирующего сигнала.
Для РЛС с фазоманипулированными зондирующими сигналами известен способ борьбы с упреждающими ОИП, заключающийся в смене по случайному закону фазового кода сигнала при каждой импульсной посылке [5, с. 439]. При этом код помехи, определенный по первому импульсу, для последующих импульсов будет не пригоден, и помеха ослабляется перестраиваемым согласованным фильтром РЛС. В современных РЛС в качестве формирующих кодов фазоманипулированных сигналов (ФМнС) чаще всего используются М-последовательности. Пики взаимных корреляционных функций (ВКФ) М-последовательностей могут до 5 раз превышать уровни боковых пиков их автокорреляционных функций (АКФ) [6, с. 63], и как следствие, смена созданного на основе М-последовательностей фазового кода от посылки к посылке не приведет к желаемому результату. Степени ослабления мощной ОИП, созданной на основе копии зондирующего сигнала в предыдущем зондировании, может оказаться недостаточной для ее подавления перестраиваемым фильтром, согласованным с сигналом в текущем зондировании. В этом и заключается недостаток известного способа.
Наиболее близким к заявляемому (прототипом) является способ защиты радиолокационной станции от импульсных помех [3], заключающийся в двухканальной фильтровой обработке принимаемого сигнала, в основном канале согласованной с зондирующим сигналом, в дополнительном канале согласованной с помехой известной структуры, амплитудном детектировании (выделении огибающей) фильтрованного сигнала в обоих каналах, сравнении продетектированного по амплитуде сигнала в основном канале с порогом обнаружения, выставленным на основе заданного уровня ложной тревоги и результатов обработки в дополнительном канале по формуле

где q0 - величина порога обнаружения, соответствующего заданному уровню ложных тревог в отсутствие сигнала и помех;
k - коэффициент, характеризующий ослабление уровня импульсной помехи при ее фильтрации, согласованной с зондирующим сигналом, относительно уровня помехи UП при ее фильтрации, согласованной с импульсной помехой.
Недостатком способа является то, что он будет эффективно работать только при условии известной структуры помехи и низкой взаимной корреляции помехи с зондирующим сигналом РЛС, что не всегда можно выполнить в условиях воздействия на РЛС упреждающих сигналоподобных помех, фазовая структура которых близка к структуре зондирующего сигнала.
Техническим результатом настоящего изобретения является разработка способа защиты РЛС с фазоманипулированными зондирующими сигналами от упреждающих сигналоподобных помех, обеспечивающего увеличение защищенности РЛС от таких помех за счет сравнения между собой значений амплитуд сигналов, полученных после двухканальной фильтрации принятого сигнала в фильтрах, согласованных с излученными сигналом в текущем и предыдущем зондированиях, амплитудного детектирования и сравнения с порогом обнаружения в каждом канале.
Технический результат достигается тем, что в способе защиты радиолокационной станции с фазоманипулированными зондирующими сигналами от упреждающих сигналоподобных помех, заключающемся в двухканальной фильтровой обработке принимаемого сигнала в основном канале, согласованной с зондирующим сигналом, в дополнительном канале, согласованной с помехой известной структуры, амплитудном детектировании фильтрованного сигнала в обоих каналах, сравнении продетектированного по амплитуде сигнала в основном канале с порогом обнаружения, выставленным на основе заданного уровня ложной тревоги и результатов обработки в дополнительном канале, согласно изобретению используют в соседних зондированиях ФМнС с низким уровнем взаимной корреляции, согласуют фильтр основного канала с сигналом, излученным в текущем зондировании, фильтр дополнительного канала - с сигналом, излученным в предыдущем зондировании (помехой известной структуры), сравнивают продетектированные по амплитуде сигналы в обоих каналах с порогом обнаружения, выставленным по шуму и соответствующим заданному уровню ложной тревоги, сравнивают между собой максимальные значения амплитуд сигналов в основном и дополнительном каналах при превышении порога обнаружения хотя бы в одном канале, принимают решение об обнаружении цели, если амплитуда сигнала в основном канале выше чем в дополнительном, принимают решение о воздействии упреждающей сигналоподобной помехи, если амплитуда сигнала в дополнительном канале выше чем в основном, принимают решение об отсутствии цели и помехи при отсутствии превышения порога в обоих каналах.
Физическая суть предлагаемого способа заключается в следующем.
Для снижения влияния упреждающих сигналоподобных помех на РЛС с фазоманипулированными зондирующими сигналами, необходимо в каждой импульсной посылке использовать разные фазовые коды и менять их от зондирования к зондированию по случайному закону. Причем для исключения накопления созданной противником копии сигнала предыдущей посылки (упреждающей помехи) в фильтре, согласованном с зондирующим сигналом в текущем зондировании, нужна система ФМнС с низким уровнем взаимной корреляции. Систему таких сигналов можно создать, например, на основе фазовых кодов, полученных из ортогональных М-последовательностей, синтезированных на основе неприводимых характеристических многочленов [6, с. 57-59].
Также для вскрытия воздействия упреждающей помехи на РЛС можно использовать специальную обработку в приемнике, основанную на различиях АКФ и ВКФ ортогональных ФМнС. Способ такой обработки изложен далее.
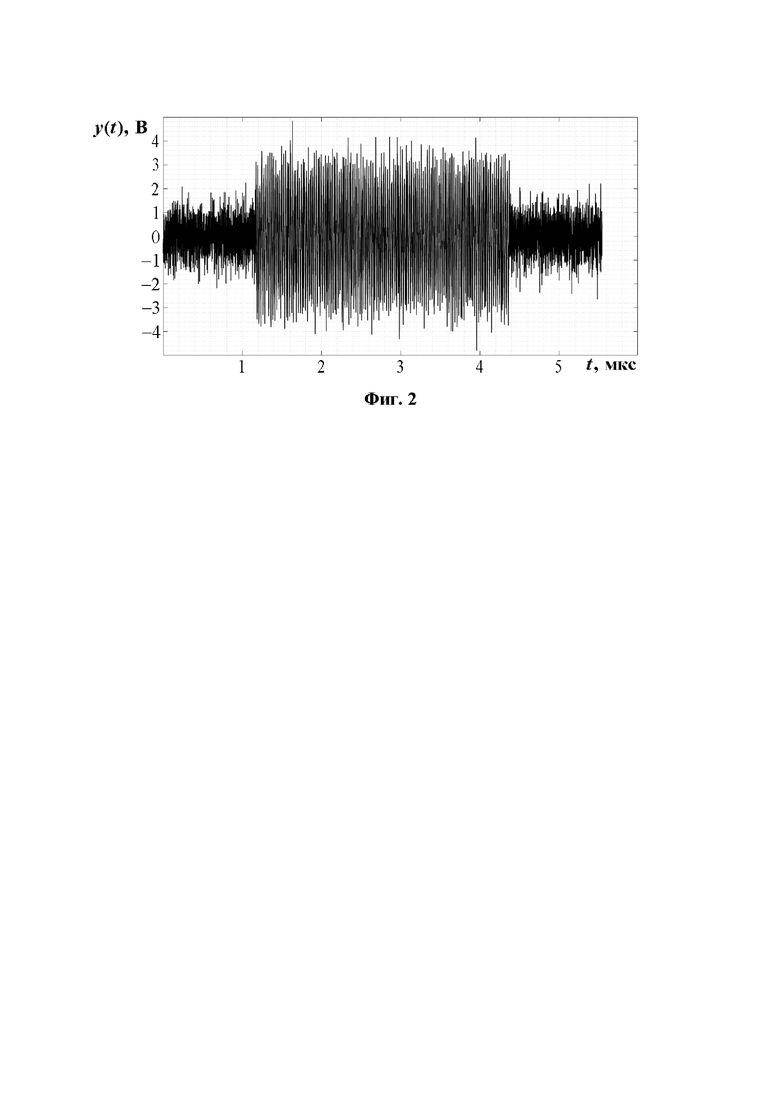
В приемнике РЛС осуществляется двухканальная фильтровая обработка принимаемого сигнала y(t), представляющего собой аддитивную смесь (фиг. 1) шума n(t) и сигнала xС(t), отраженного от цели в текущем зондировании, или (фиг. 2) шума n(t) и упреждающей сигналоподобной помехи xП(t), являющейся копией излученного РЛС сигнала в предыдущем зондировании.
Перестраиваемые фильтры в каналах имеют перестраиваемые импульсные характеристики (ИХ), причем для текущего зондирования ИХ h0(t) фильтра основного канала согласована с сигналом xС(t), а ИХ hд(t) фильтра дополнительного канала - с копией излученного сигнала в предыдущем зондировании xП(t). Фильтр дополнительного канала является, таким образом, согласованным с упреждающей сигналоподобной помехой, так как она, по определению, есть копия сигнала с предыдущего зондирования.
В обоих каналах принимаемый сигнал y(t) после фильтрации подвергается амплитудному детектированию (выделению огибающей) и подается на входы пороговых устройств соответствующих каналов, где сравнивается с порогом обнаружения Zпор в момент времени t=τс. В результате в основном канале реализуется алгоритм, описываемый выражением

а в дополнительном канале - выражением

где τс - длительность сигнала.
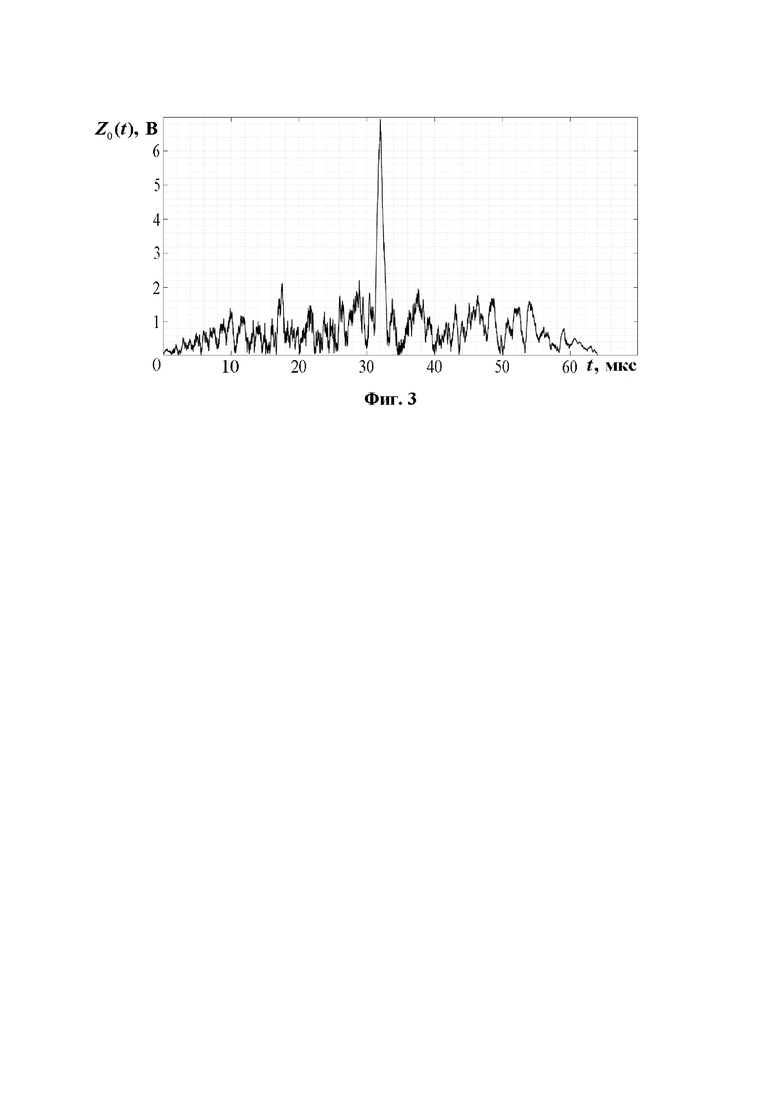
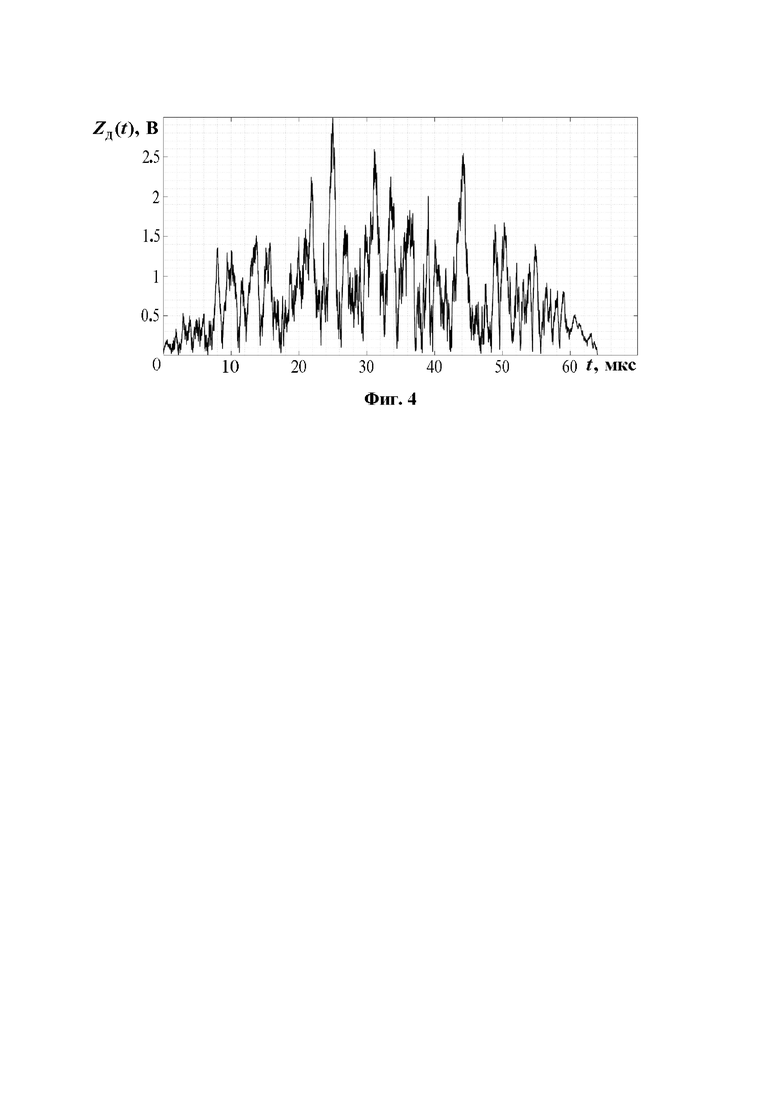
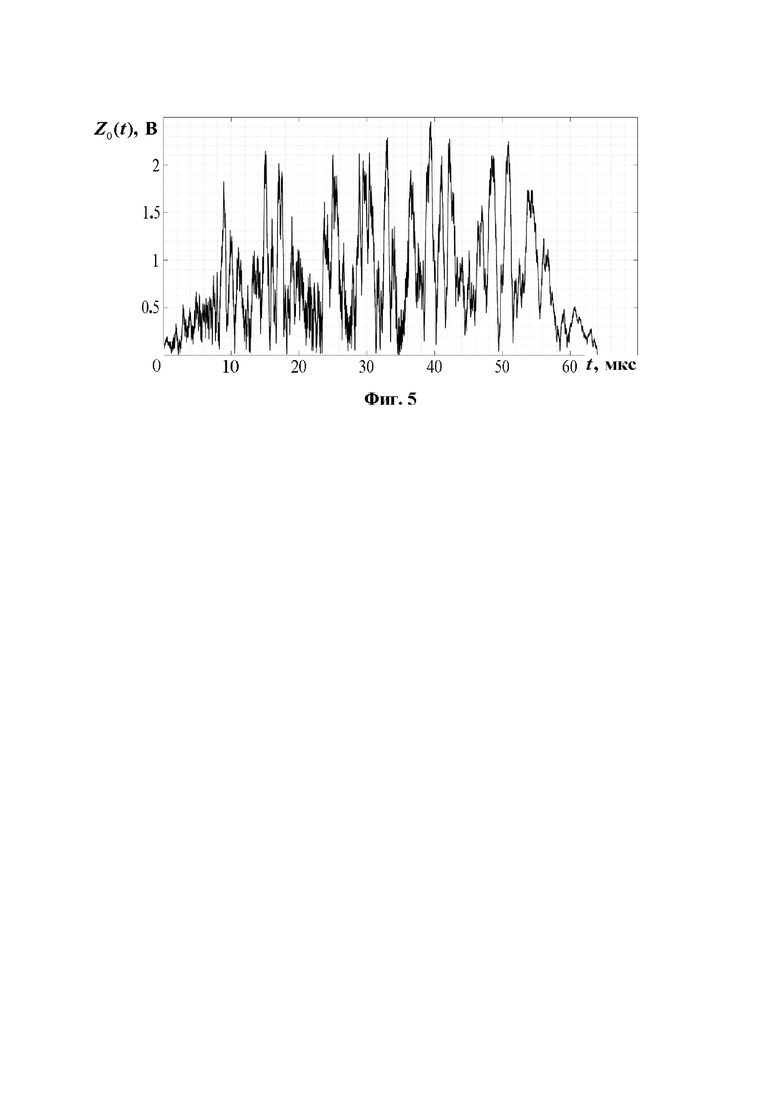
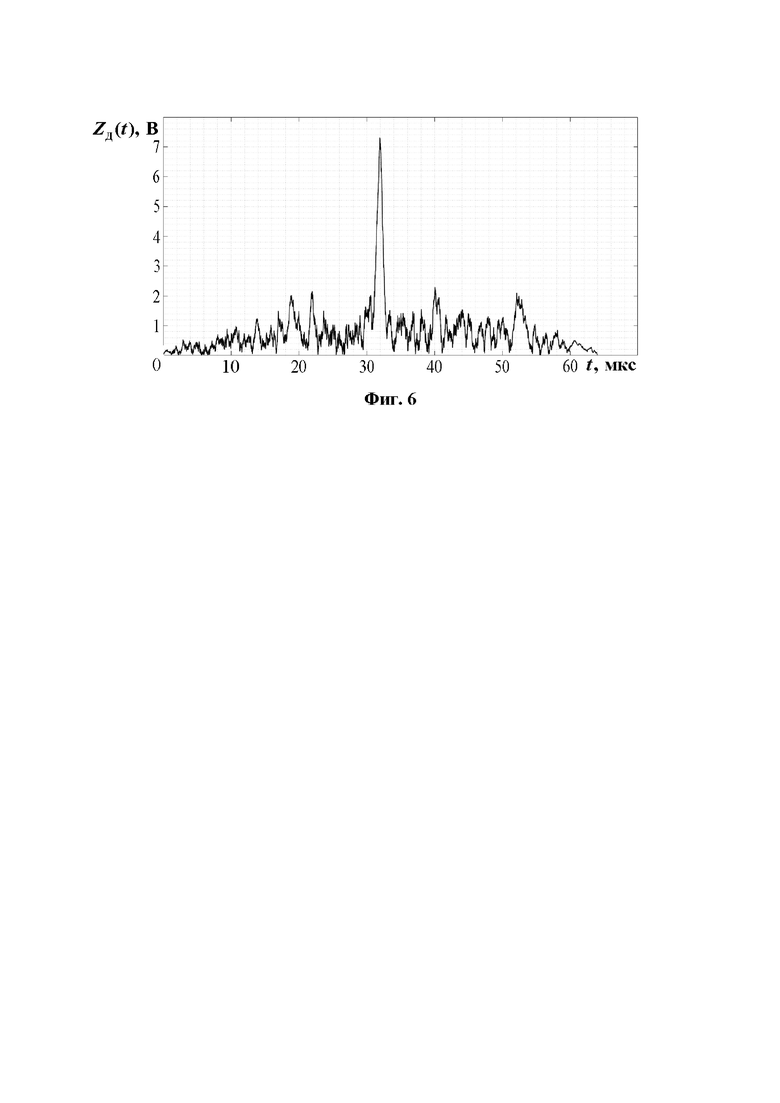
Напряжения Z0(t) и Zд(t) на входах пороговых устройств при наличии в принимаемом колебании y(t) полезного сигнала xС(t) показаны на фиг. 3 и 4, при наличии упреждающей помехи xП(t) - на фиг. 5 и 6.
В обоих каналах выставляются одинаковые уровни Zпор порогов обнаружения по шуму, соответствующие заданному уровню ложной тревоги. Методика расчета значений порогов по заданному уровню ложной тревоги приведена в [7, с. 95-96], а методика экспериментальной оценки их значений в [8, с. 220-223].
Операция сравнения напряжений Z0(t) и Zд(t) с порогом Zпор в момент времени t=τс необходима для исключения из дальнейшей обработки шумов при отсутствии упреждающей помехи или сигнала, отраженного от цели. В случае превышения сигналом порога обнаружения хотя бы в одном канале обработка продолжается, в противном случае принимается решение об отсутствии цели и сигналоподобной помехи. Условие превышения порога хотя бы в одном канале для продолжения обработки выбрано из-за того, что в случае слабого сигнала, отраженного от цели (слабой сигналоподобной помехи) уровня амплитуды фильтрованного сигнала в несогласованном с ним фильтре может не хватить для превышения порога обнаружения в дополнительном (основном) канале обработки.
Дальнейшая обработка включает в себя оценку максимальных амплитуд напряжений Z0(t) и Zд(t) в каналах и сравнение полученных значений между собой в соответствии с выражением

По результату сравнения принимают решение об обнаружении цели, если разность Δ больше 0, или о воздействии упреждающей сигналоподобной помехи, если разность Δ меньше 0.
В предлагаемом способе в результате согласованной фильтрации и амплитудного детектирования сигнала у(t) в одном из каналов формируется АКФ сигнала, отраженного от цели (сигналоподобной помехи), а в результате несогласованной фильтрации и амплитудного детектирования в другом канале - ВКФ сигналоподобной помехи и сигнала, отраженного от цели. Поэтому принимаемое решение о наличии цели или помехи основывается на известном утверждении, что уровень пиков ВКФ сигналов, близких к ортогональным, всегда ниже пиков их АКФ. Причем мощность сигнала при его сравнении после согласованной и несогласованной с ним фильтрации не будет оказывать влияния на результат.
Таким образом достигается заявленный технический результат.
Заявленный способ поясняется графическими чертежами, на которых показаны:
фиг. 1 - принимаемый сигнал y(t), являющийся аддитивной смесью шума n(t) и сигнала xС(t), отраженного от цели;
фиг. 2 - принимаемый сигнал y(t), являющийся аддитивной смесью шума n(t) и упреждающей сигналоподобной помехи xП(t);
фиг. 3 - напряжение Z0(t) на входе порогового устройства основного канала обработки при наличии в принимаемом колебании y(t) полезного сигнала хС(t);
фиг. 4 - напряжение Zд(t) на входе порогового устройства дополнительного канала обработки при наличии в принимаемом колебании y(t) полезного сигнала xС(t);
фиг. 5 - напряжение Z0(t) на входе порогового устройства основного канала обработки при наличии в принимаемом колебании y(t) упреждающей помехи xП(t);
фиг. 6 - напряжение Zд(t) на входе порогового устройства дополнительного канала обработки при наличии в принимаемом колебании у(t) упреждающей помехи xП(t);
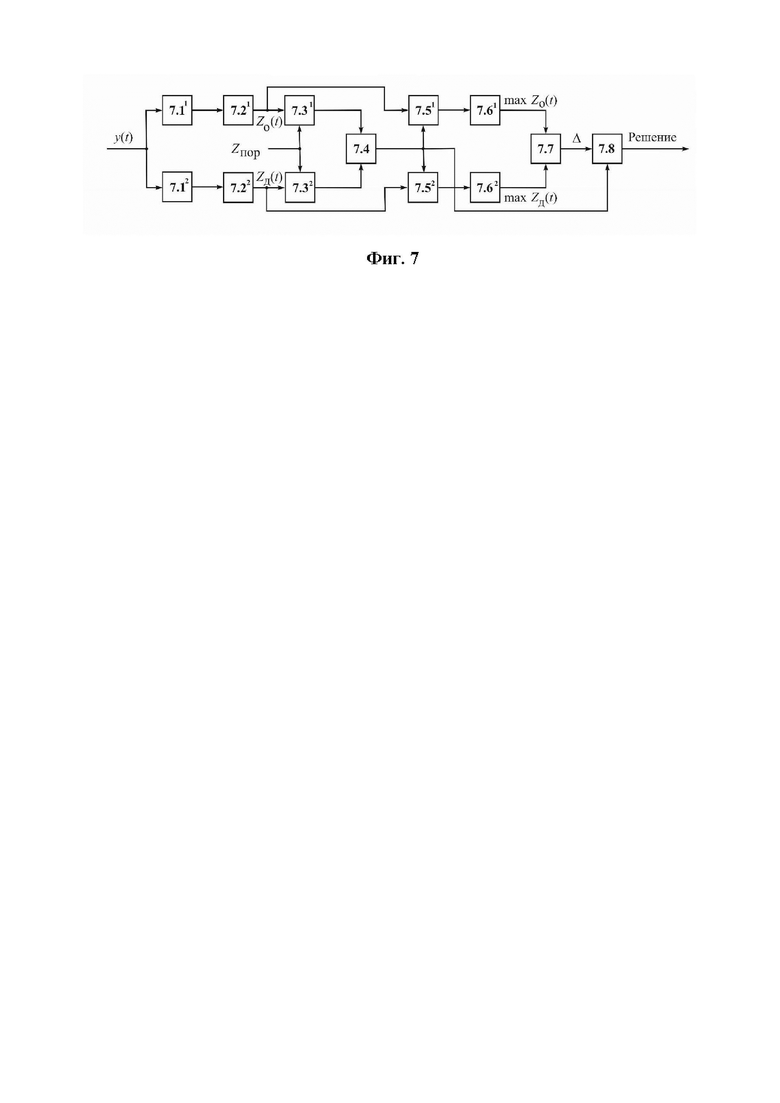
фиг. 7 - блок-схема устройства защиты РЛС с фазоманипулированными зондирующими сигналами от упреждающих сигналоподобных помех. На фиг. 7 приняты следующие обозначения:
7.11 - перестраиваемый фильтр, согласованный с сигналом, излученным в текущем зондировании;
7.12 - перестраиваемый фильтр, согласованный с сигналом, излученным в предыдущем зондировании;
7.21, 7.22 - детекторы огибающей;
7.31, 7.32 - блоки сравнения с порогом обнаружения (пороговые устройства);
7.4 - логический элемент «ИЛИ»;
7.51, 7.52 - ключевые схемы;
7.61, 7.62 - блоки оценки максимума;
7.7 - вычитающее устройство;
7.8 - блок принятия решения;
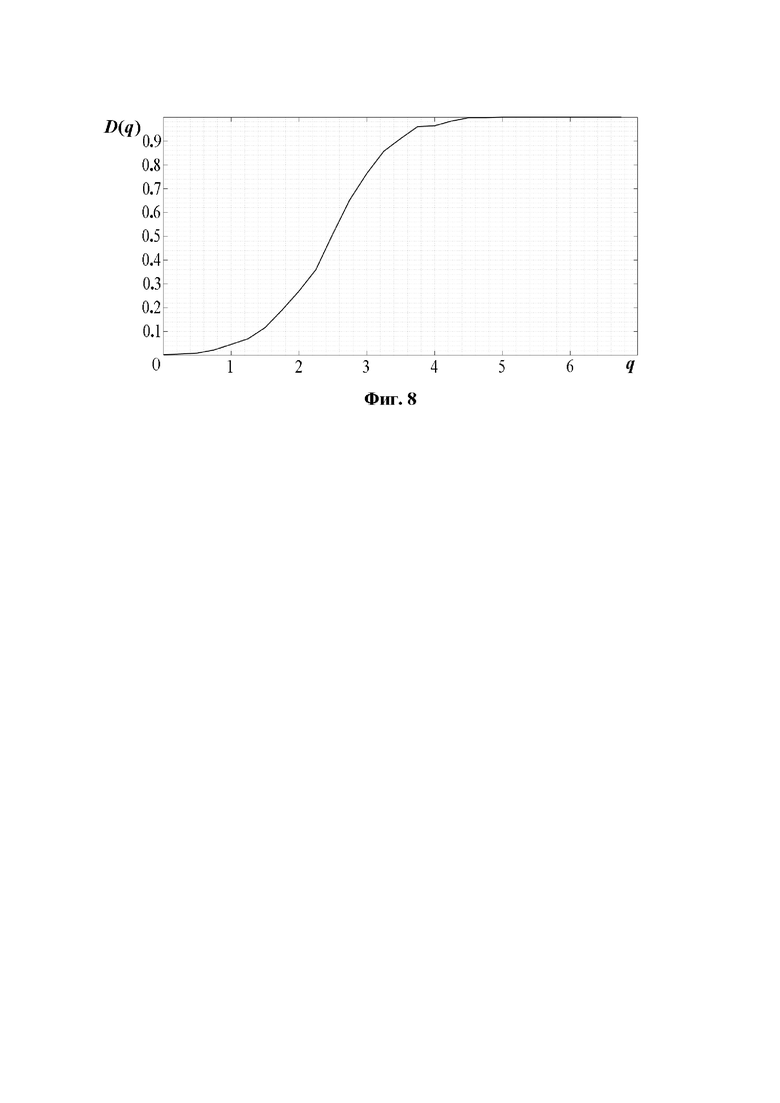
фиг. 8 - Зависимость от отношения сигнал/шум вероятности принятия правильного решения об обнаружении цели D(q) при обработке сигнала, отраженного от цели;
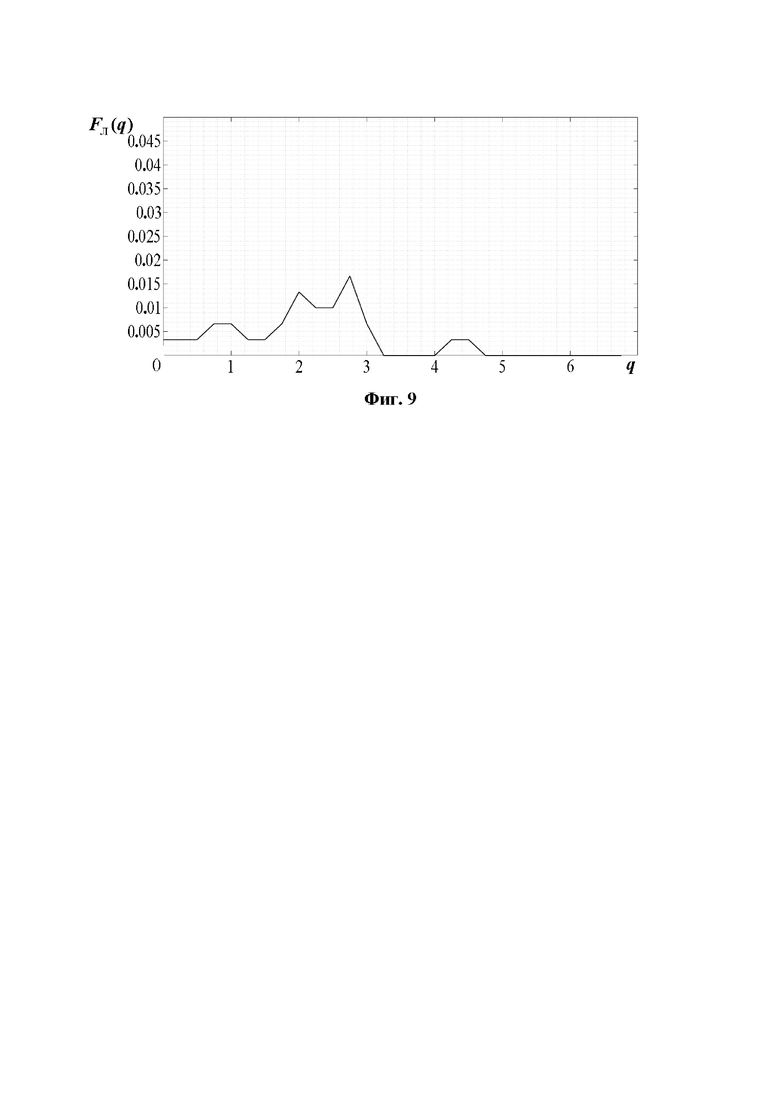
фиг. 9 - Зависимость от отношения сигнал/шум вероятности принятия ложного решения об обнаружении цели FЛ(q) при обработке упреждающей сигналоподобной помехи;
фиг. 10 - Зависимость от отношения сигнал/шум вероятности принятия правильного решения о воздействии упреждающей помехи D(q) при обработке упреждающей сигналоподобной помехи;
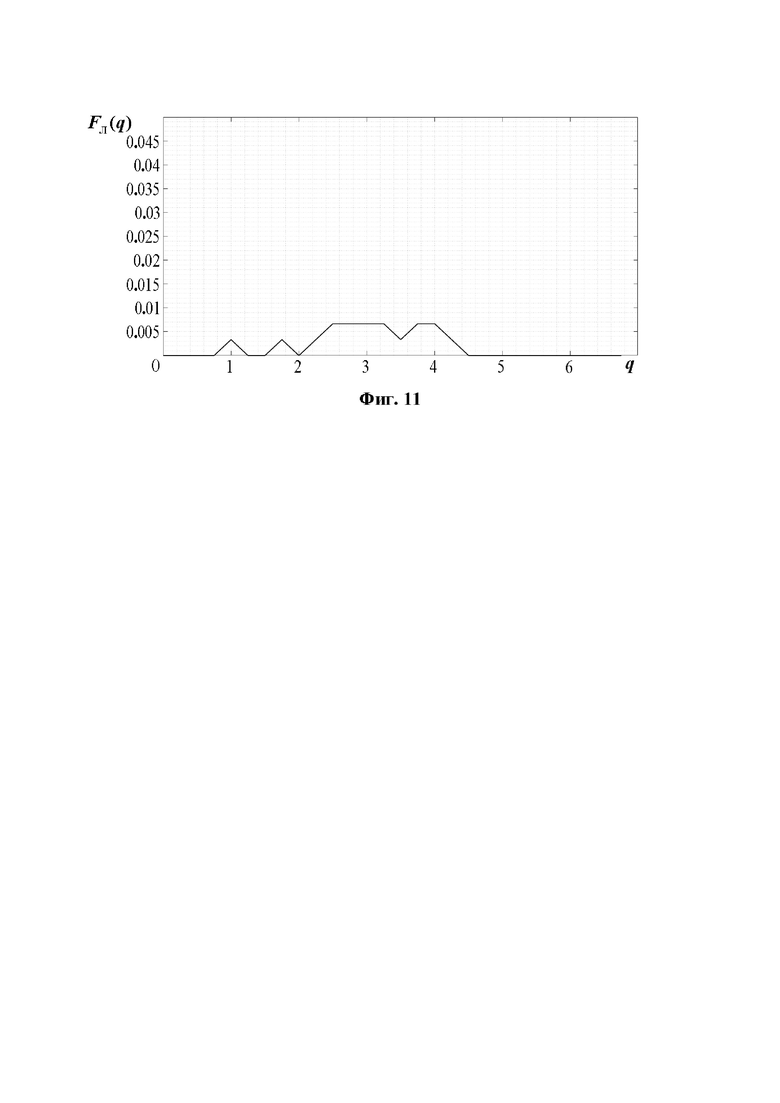
фиг. 11 - Зависимость от отношения сигнал/шум вероятности принятия ложного решения о воздействии упреждающей помехи FЛ(q) при обработке сигнала, отраженного от цели.
Реализовать предлагаемый способ можно с помощью блок-схемы устройства, представленной на фиг. 7.
Устройство защиты РЛС с фазоманипулированными зондирующими сигналами от упреждающих сигналоподобных помех (фиг. 7) содержит последовательно соединенные перестраиваемый фильтр 7.11, согласованный с сигналом, излученным в текущем зондировании, и детектор огибающей 7.21, а также последовательно соединенные перестраиваемый фильтр, согласованный с 7.12, согласованный с сигналом, излученным в предыдущем зондировании, и второй детектор огибающей 7.22, при этом соединенные между собой входы фильтров 7.11 и 7.12 образуют вход устройства защиты РЛС от упреждающих сигналоподобных помех, выход детектора огибающей 7.21 соединен параллельно со входом блока сравнения с порогом обнаружения 7.31 и коммутируемым входом ключевой схемы 7.51, а выход детектора огибающей 7.22 соединен параллельно со входом второго блока сравнения с порогом обнаружения 7.32 и коммутируемым входом второй ключевой схемы 7.52, управляющие входы блоков сравнения с порогом обнаружения 7.31 и 7.32 соединены между собой и на них подается напряжение, соответствующее уровню порога, выходы блоков сравнения с порогом обнаружения 7.31 и 7.32 соединены со входами логического элемента «ИЛИ» 7.4, выход которого соединен с управляющим входом блока принятия решения 7.8 и управляющими входами ключевых схем 7.51 и 7.52, выход ключевой схемы 7.51 соединен со входом блока оценки максимума 7.61, а выход второй ключевой схемы 7.52 соединен со входом второго блока оценки максимума 7.62, выходы блоков оценки максимума 7.61 и 7.62 соединены со входами вычитающего устройства 7.7, выход которого соединен со входом блока принятия решения 7.8, выход блока принятия решения 7.8 является выходом устройства защиты упреждающих сигналоподобных помех.
Устройство защиты РЛС с фазоманипулированными зондирующими сигналами от упреждающих сигналоподобных помех, работает следующим образом. Принимаемый сигнал y(t) (аддитивная смесь (фиг. 1) шума n(t) и сигнала xС(t), отраженного от цели в текущем зондировании, или (фиг. 2) шума n(t) и упреждающей сигналоподобной помехи xП(t)) поступает на входы перестраиваемых фильтров 7.11 и 7.12. Импульсная характеристика фильтра 7.11 согласована с сигналом, излученным в текущем зондировании, а фильтра 7.12 - с сигналом, излученным в предыдущем зондировании. С помощью детекторов огибающей 7.21 и 7.22 выделяются огибающие выходных сигналов соответствующих им фильтров. Огибающая Z0(t), выделенная детектором 7.21, подается на вход блока сравнения с порогом обнаружения 7.31 и коммутируемый вход ключевой схемы 7.51, а огибающая Zд(t), выделенная детектором 7.22, - на вход блока сравнения с порогом обнаружения 7.32 и коммутируемый вход ключевой схемы 7.52. На соединенные между собой управляющие входы блоков сравнения с порогом 7.31 и 7.32 подается заранее вычисленное значение порога обнаружения, соответствующее заданному уровню ложной тревоги. В случае превышения огибающей фильтрованного сигнала в момент времени t=τс порога обнаружения на выходе блока сравнения с порогом обнаружения формируется сигнал логической 1, в противном случае выходной сигнал блока равен логическому 0. Так как выходы блоков сравнения с порогом 7.31 и 7.32 подключены ко входам логического элемента «ИЛИ» 7.4, то в соответствии с логикой его работы выходной сигнал элемента будет равен логической 1, если выходной сигнал детектора 7.21 превысит порог обнаружения в блоке сравнения с порогом обнаружения 7.31, или выходной сигнал детектора 7.22 превысит порог обнаружения в блоке сравнения с порогом обнаружения 7.32. На выходе элемента «ИЛИ» 7.4 также сформируется логическая 1 при одновременном превышении порогов обнаружения входными сигналами блоков сравнения с порогом обнаружения 7.31 и 7.32. Выходной сигнал логического элемента «ИЛИ» 7.4 управляет блоком принятия решения 7.8 и ключевыми схемами 7.51 и 7.52. При появлении на выходе логического элемента 7.4 логической 1 замыкаются ключи 7.51 и 7.52, и выходной сигнал детектора огибающей 7.21 подается на вход блока оценки максимума 7.61, а выходной сигнал детектора огибающей 7.22 - на вход блока оценки максимума 7.62. При наличии на входе перестраиваемых фильтров только шумов порог обнаружения не будет превышен ни в одном из блоков сравнения с порогом обнаружения, следовательно, на выходе логического элемента «ИЛИ» будет логический 0, и коммутации ключевых схем 7.51 и 7.52 не произойдет. В блоках оценки максимумов 7.61 и 7.62 вычисляются значения max (Z0(t)) и max (Zд(t)) и подаются на входы вычитающего устройства 7.7.
На выходе вычитающего устройства формируется положительный сигнал Δ при превышении выходным сигналом блока оценки максимума 7.61 выходного сигнала блока оценки максимума 7.62 и отрицательный сигнал Δ в противном случае. Сигнал Δ с выхода вычитающего устройства 7.7 подается на вход блока принятия решения 7.8, на управляющем входе которого в данный момент присутствует логическая 1, сформированная логическим элементом «ИЛИ» 7.4. На выходе блока принятия решения 7.8 формируются сигналы, соответствующие решениям: «обнаружение цели» в случае положительного сигнала на входе блока 7.8 и логической 1 на его управляющем входе, «воздействие упреждающей помехи» в случае отрицательного сигнала на входе блока 7.8 и логической 1 на его управляющем входе, «отсутствие цели и помехи» при присутствии логического 0 на его управляющем входе.
Заявленный технический результат подтвержден результатами, полученными методом имитационного моделирования в пакете прикладных программ (ППП) MATLAB.
В качестве исходных псевдослучайных последовательностей для моделирования ФМнС с полностью известными параметрами в текущем и предыдущем зондированиях использовались две 32 элементные М-последовательности [00001011010100011101111100100110] и [00001101010010001011111011001110], полученные по методике, изложенной в [6, с. 57-59], длительность дискрета сигнала составляла 1 мкс, обработка проводилась на промежуточной частоте ƒ0=4 МГц на фоне гауссовских шумов приемника с нулевым математическим ожиданием и единичной дисперсией, фильтр основного канала был согласован с сигналом текущего зондирования, а дополнительного - с сигналом с предыдущего зондирования, сигнал предыдущего зондирования играл роль упреждающей сигналоподобной помехи.
Для подтверждения работоспособности метода был проведен статистический эксперимент по оценке вероятности принятия правильного решения D об обнаружении цели (воздействии упреждающей помехи) при различных отношениях q сигнал/шум (помеха/шум). Величина порога в блоках сравнения с порогом обнаружения 7.31, 7.32 была выставлена по шуму и соответствовала вероятности ложной тревоги F=10-3. Также были оценены вероятности принятия ложных решений FЛ об обнаружении цели при воздействии упреждающей помехи и наоборот для этих же значений q. Зависимости D(q) и FЛ(q) при наличии на входе схемы сигнала, отраженного от цели приведены на фиг. 8 и 9, а при воздействии упреждающей сигналоподобной помехи - на фиг. 10 и 11. Анализ полученных зависимостей показывает, что при q=6 (для сигнала с полностью известными параметрами при F=10-3) вероятность принятия правильного решения по полезному сигналу (по упреждающей помехе) равна 1, что совпадает с результатами, полученными в [9, рис. 3.7 с. 140], и подтверждает работоспособность метода.
Таким образом, использование зондирующих сигналов с низким уровнем ВКФ и обработка, основанная на сравнении уровня АКФ сигнала текущего зондирования с уровнем его ВКФ с сигналом с предыдущего зондирования и наоборот, а также исключение из результатов сравнения решений, принимаемых только по шуму (за счет пороговых устройств), позволяет выявить воздействие упреждающей сигналоподобной помехи, чем и достигается заявленный технический результат.
Список литературы
1. Защита от радиопомех. Под ред. М.В. Максимова. М.: Сов. радио, 1976, 496 с. с ил. - Текст: непосредственный.
2. Леонов А.И., Фомичев К.И. Моноимпульсная радиолокация. - 2-е изд., перераб. и доп.- М.: Радио и связь, 1984. - 312 с, ил. - Текст: непосредственный.
3. Патент №2494412 Российская Федерация, МПК G01S 7/36 (2006.01). Способ защиты радиолокационной станции от импульсных помех и устройство для его реализации: 2012101100/07: заявл. 11.01.2012: опубл. 27.09.2013 / Лужных С.Н., Кисляков В.И., Прудников С.Я.; заявитель Открытое акционерное общество «НИИ измерительных приборов - Новосибирский завод имени Коминтерна» (ОАО «НПО НИИИП - НЗиК») - 9 с: ил. - Текст: непосредственный.
4. Патент №2502084 Российская Федерация, МПК G01S 13/00 (2006.01). Способ стабилизации вероятности ложной тревоги и устройство для его реализации: 2011146990/07: заявл. 18.11.2011: опубл. 20.12.2013 / Беляев Б.Г., Жибинов В.А., Прудников С.Я.; заявитель Открытое акционерное общество «НИИ измерительных приборов - Новосибирский завод имени Коминтерна» (ОАО «НПО НИИИП - НЗиК») - 8 с.: ил. - Текст: непосредственный.
5. Свистов В.М. Радиолокационные сигналы и их обработка. М., «Сов. радио», 1977, 448 с. - Текст: непосредственный.
6. Варакин Л.Е. Системы связи с шумоподобными сигналами / Л.Е. Варакин. - М.: Радио и связь, 1985, 384 с. - Текст: непосредственный.
7. Перов А.И. Статистическая теория радиотехнических систем. Учебное пособие для вузов / А.И. Перов. - М.: Радиотехника, 2003, 400 с. - Текст: непосредственный.
8. Сосулин Ю.Г. Теория обнаружения и оценивания стохастических сигналов / Ю.Г. Сосулин. - М.: Сов. радио, 1978, 320 с. - Текст: непосредственный.
9. Информационные технологии в радиотехнических системах: учеб. пособие / под ред. И.Б. Федорова. - Изд. 3-е перераб. и доп. - М.: Изд-во МГТУ им. Н.Е. Баумана, 2011. - 846, [2] с.: ил. - (Информатика в техническом университете). - Текст: непосредственный.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ЗАЩИТЫ РАДИОЛОКАЦИОННОЙ СТАНЦИИ С МОНОИМПУЛЬСНОЙ ПЕЛЕНГАЦИЕЙ ОТ МНОГОКРАТНЫХ ОТВЕТНО-ИМПУЛЬСНЫХ ПОМЕХ | 2023 |
|
RU2815879C1 |
| СПОСОБ РАДИОЛОКАЦИИ | 2023 |
|
RU2804395C1 |
| ПРИЕМНИК ИМПУЛЬСНОГО СИГНАЛА | 2012 |
|
RU2528081C2 |
| Способ обнаружения маневрирующих малоразмерных воздушных объектов с использованием параметрических преобразований и устройство для его реализации | 2023 |
|
RU2806448C1 |
| СПОСОБ ПЕРВИЧНОЙ ДАЛЬНОМЕТРИИ ЦЕЛЕЙ ИМПУЛЬСНО-ДОПЛЕРОВСКОЙ РЛС С МАЛОЙ СКВАЖНОСТЬЮ ЗОНДИРУЮЩИХ ПОСЫЛОК | 2020 |
|
RU2742461C1 |
| СПОСОБ ОБНАРУЖЕНИЯ МАЛОРАЗМЕРНЫХ ДВИЖУЩИХСЯ ЦЕЛЕЙ НА ФОНЕ НЕПОДВИЖНЫХ ОБЪЕКТОВ С ПОМОЩЬЮ ШУМОВОГО СИГНАЛА И ШУМОВАЯ РАДИОЛОКАЦИОННАЯ СТАНЦИЯ, РЕАЛИЗУЮЩАЯ ДАННЫЙ СПОСОБ | 2024 |
|
RU2831136C1 |
| СИСТЕМА ПЕРЕДАЧИ ИНФОРМАЦИИ | 2019 |
|
RU2719545C1 |
| СПОСОБ ЗАЩИТЫ РАДИОЛОКАЦИОННОЙ СТАНЦИИ ОТ ИМПУЛЬСНЫХ ПОМЕХ И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2012 |
|
RU2494412C2 |
| СПОСОБ ОБНАРУЖЕНИЯ ИСКАЖЕННЫХ ИМПУЛЬСНЫХ СИГНАЛОВ | 2009 |
|
RU2425394C2 |
| Способ двойного спектрального анализа и взвешенной обработки квазинепрерывных сигналов при отсутствии априорных сведений об их параметрах | 2024 |
|
RU2838368C1 |


Изобретение относится к области радиолокации и может быть использовано в радиолокационных станциях (РЛС) с фазоманипулированными зондирующими сигналами для защиты от упреждающих сигналоподобных помех. Технический результат заключается в увеличении защищенности РЛС от упреждающих сигналоподобных помех. В заявленном способе осуществляют двухканальную фильтровую обработку принимаемого сигнала, в основном канале согласованную с зондирующим сигналом, в дополнительном канале, согласованную с помехой известной структуры, амплитудное детектирование фильтрованного сигнала в обоих каналах, сравнение продетектированного по амплитуде сигнала в основном канале с порогом обнаружения, выставленном на основе заданного уровня ложной тревоги и результатов обработки в дополнительном канале. При этом в соседних зондированиях используют фазоманипулированные сигналы с низким уровнем взаимной корреляции. Фильтр основного канала согласуют с сигналом, излученным в текущем зондировании, фильтр дополнительного канала - с сигналом, излученным в предыдущем зондировании - помехой известной структуры. Сравнивают продетектированные по амплитуде сигналы в обоих каналах с порогом обнаружения, выставленным по шуму и соответствующим заданному уровню ложной тревоги, сравнивают между собой максимальные значения амплитуд сигналов в основном и дополнительном каналах при превышении порога обнаружения хотя бы в одном канале. Принимают решение об обнаружении цели, если амплитуда сигнала в основном канале выше, чем в дополнительном, решение о воздействии упреждающей сигналоподобной помехи - если амплитуда сигнала в дополнительном канале выше чем в основном, решение об отсутствии цели и помехи - при отсутствии превышения порога в обоих каналах. 11 ил.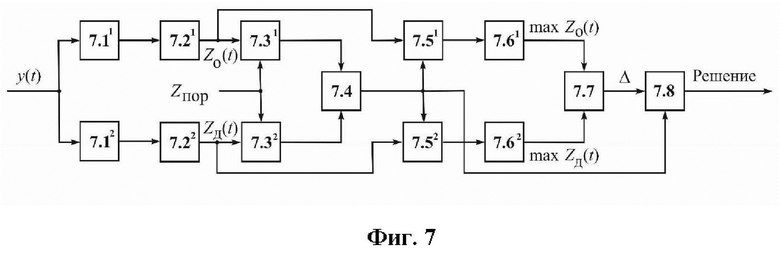
Способ защиты радиолокационной станции с фазоманипулированными зондирующими сигналами от упреждающих сигналоподобных помех, заключающийся в том, что осуществляют двухканальную фильтровую обработку принимаемого сигнала, при этом фильтр основного канала согласуют с зондирующим сигналом, а фильтр дополнительного канала с помехой известной структуры, выполняют амплитудное детектирование фильтрованных сигналов в обоих каналах, сравнивают продетектированный по амплитуде сигнал в основном канале с порогом обнаружения, который выставляют на основе заданного уровня ложной тревоги и результатов обработки в дополнительном канале, отличающийся тем, что в соседних зондированиях используют фазоманипулированные сигналы, фазовые коды которых получают на основе ортогональных М-последовательностей, согласуют фильтр основного канала с сигналом, излученным в текущем зондировании, а фильтр дополнительного канала с сигналом, излученным в предыдущем зондировании – помехой известной структуры, сравнивают продетектированные по амплитуде сигналы в обоих каналах с порогом обнаружения, который выставляют по шуму, в соответствии с заданным уровнем ложной тревоги, при превышении порога обнаружения хотя бы в одном канале сравнивают между собой максимальные значения амплитуд сигналов в основном и дополнительном каналах, принимают решение об обнаружении цели, если амплитуда сигнала в основном канале выше, чем в дополнительном, принимают решение о воздействии упреждающей сигналоподобной помехи, если амплитуда сигнала в дополнительном канале выше, чем в основном, принимают решение об отсутствии цели и помехи при отсутствии превышения порога в обоих каналах.
| СПОСОБ СТАБИЛИЗАЦИИ ВЕРОЯТНОСТИ ЛОЖНОЙ ТРЕВОГИ И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2011 |
|
RU2502084C2 |
| Устройство компенсации импульсных помех | 2019 |
|
RU2714491C1 |
| СПОСОБ ЗАЩИТЫ РАДИОЛОКАЦИОННОЙ СТАНЦИИ ОТ ИМПУЛЬСНЫХ ПОМЕХ И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2012 |
|
RU2494412C2 |
| СПОСОБ ПОДАВЛЕНИЯ РАДИОЛОКАЦИОННЫХ СИГНАЛОВ, ИМИТИРУЮЩИХ ЦЕЛЬ, И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2014 |
|
RU2578505C1 |
| СПОСОБ ДВУХКАНАЛЬНОГО ОБНАРУЖЕНИЯ РАДИОЛОКАЦИОННЫХ СИГНАЛОВ СО СТАБИЛИЗАЦИЕЙ ВЕРОЯТНОСТИ ЛОЖНОЙ ТРЕВОГИ | 2015 |
|
RU2585257C1 |
| Способ радиоэлектронной защиты наземной РЛС кругового обзора и устройство для его реализации | 2023 |
|
RU2812727C1 |
| Карманов Ю.Т., Непомнящий Г.А | |||
| Способ защиты РЛС со сложным сигналом от имитирующей помехи // Вестник Южно-Уральского государственного университета | |||
| Серия: Компьютерные технологии, | |||

