Изобретение относится к сельскому хозяйству, в частности к устройствам управления мобильньми кормораздатчи- ками.
Цель изобретения - повышение точности дозирования и уменьшение потерь корма.
На фиг. 1 приведена структурная схема устройства управления мобиль- ным кормораздатчиком; на фиг. 2 - структурная схема блока управления; на фиг. 3 - задатчик временных интервалов; на фиг. 4 - входное согласующее устройство; на фиг. 5 - выход- мое согласующее устройство; на фиг.6- блок-схема фрагмента алгоритма.
Устройство управления содержит (фиг. 1) блок 1 управления с двумя группами входов-выходов 2 и 3, ре- гистр-защелку А с входом 5, постоянное запоминающее устройство (ПЗУ) 6, интерфейс 7 с первой 8 и второй 9 группами входов и группой 10 выходов, входное согласующее устройство 11с входом 12, путевой датчик 13, задатчик 14 временных интервалов, выходное согласующее устройство 15 с группой выходов 16 и исполнительный привод
17.
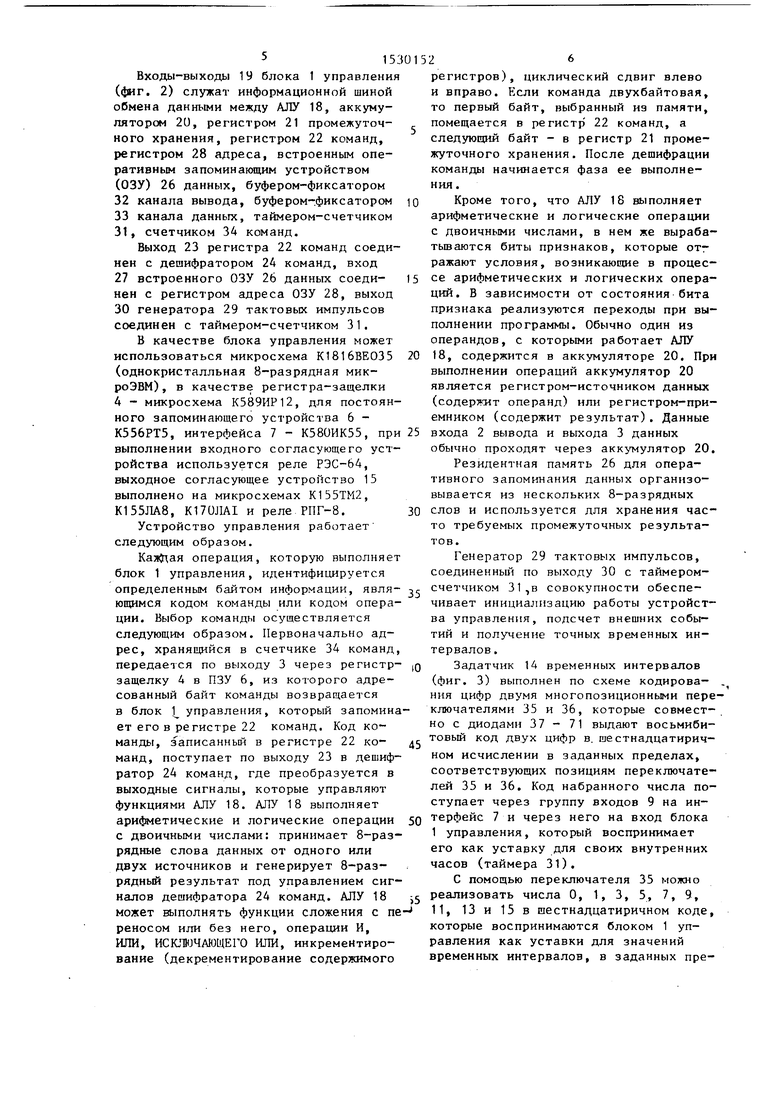
Блок управления (фиг. 2) содержит арифметико-логическое устройство (АЛУ 18 с группой 19 входов-выходов, аккумулятор 20, регистр 21 промежуточного хранения, регистр 22 команд с выходом 23, дешифратор 24 команд с выходом 25, встроенное запоминающее устройство 26 данных с входом 27, регистр 2В адреса, генератор 29 тактовых импульсов с выходом 30, таймер- счетчик 31, буфер-фиксатор 32 канала , буфер-фиксатор 33 канала данных, счетчик 34 команд.
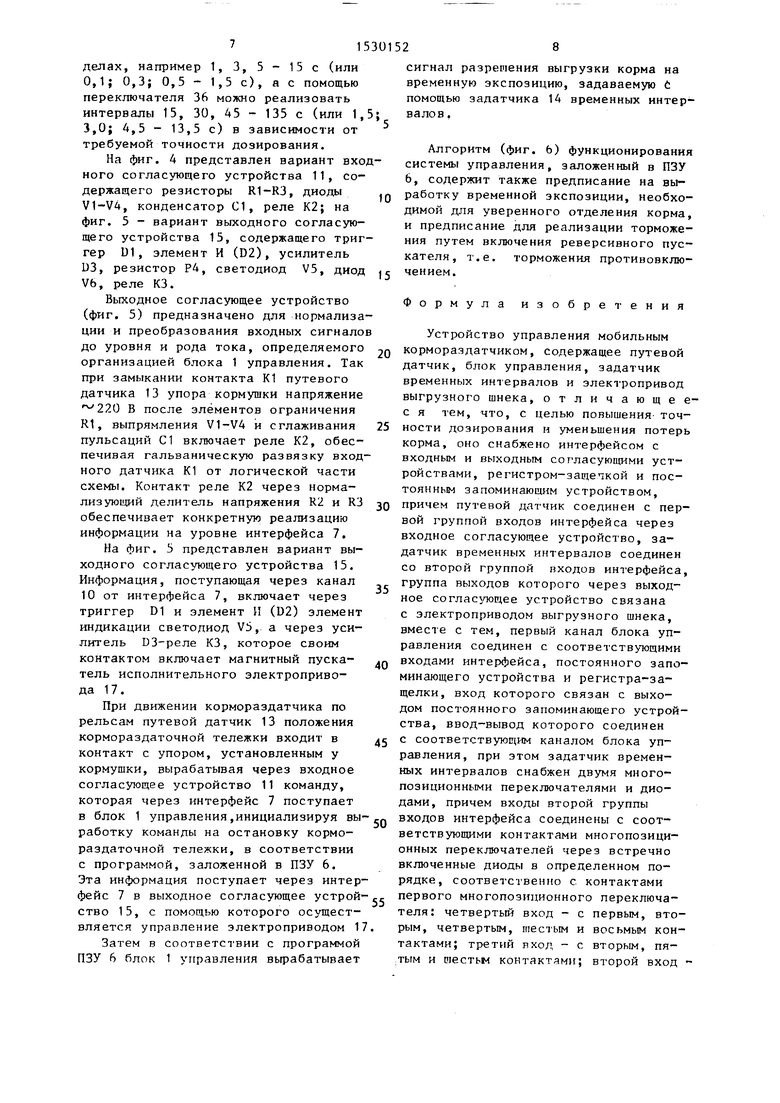
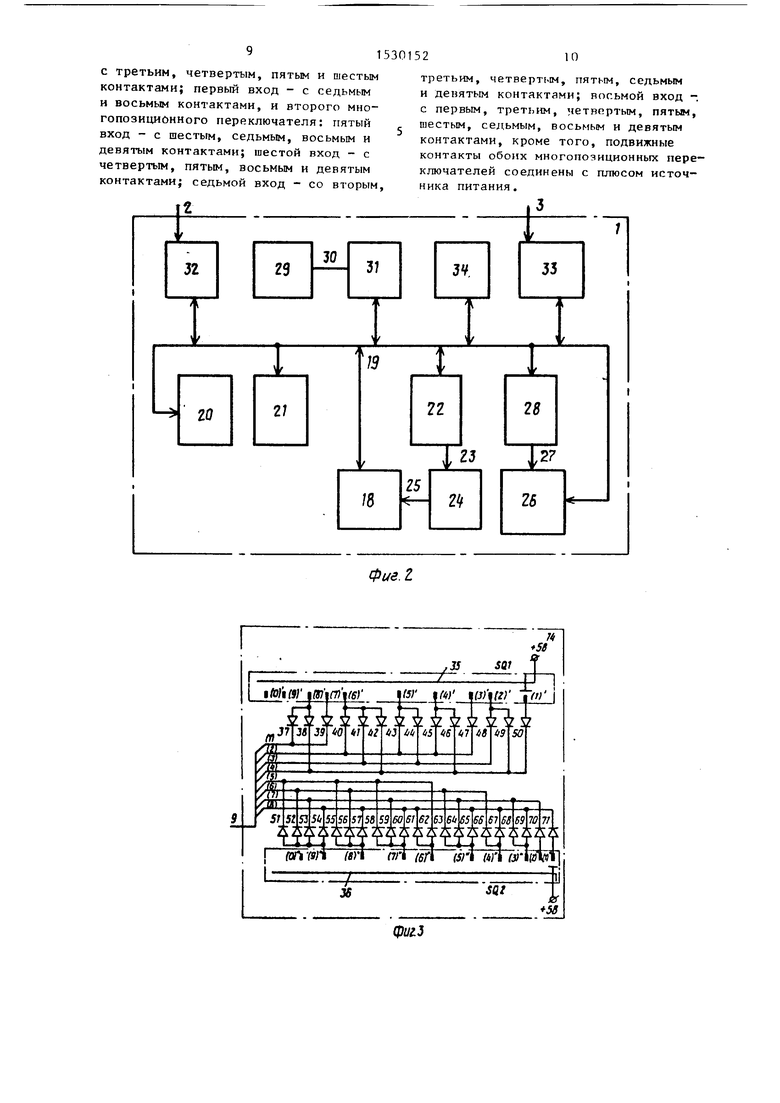
Задатчик 14 временных интервалов (фиг. 3) содержит многопозиционные пе переключатели 35 и 36 и диоды 37-71. Первый контакт первого многопозиционного переключателя 35 через диод 50 связан соответственно с четвертым входом третьего информационного ка- нала интерфейса 7, второй контакт через диоды 48 и 49 - с четвертым и третьим входами того же канала, третий контакт через диод 47 - с вторым входом канала интерфейса 7,, четвер- тый контакт через диоды 46 и 45 - с вторым и четвертым входами канала интерфейса 7, пятый контакт через диоды 43 и 44 - с вторым и третьим входами, шестой контакт через диоды 40 - 42 - с вторым, третьим и четвертым входами канала интерфейса 7, седьмой контакт через диод 39 - с первым входом интерфейсного канала, восьмой контакт - с первьм и четвертым входами интерфейсного канала. Первый контакт второго многопозиционного переключателя 36 соединен через диод 71 с восьмым входом канала интерфейса 7, второй контакт через -диод 70 - с седьмым входом канала интерфейса 7, третий контакт через диоды 69 и 68 - с восьмым входом интерфейса 7, четвертый контакт через диоды 67 и 66 - с восьмым и шестым входами интерфейса 7, пятый контакт через диоды 65, 64 и 63 - с восьмым, седьмым и шестым входами интерфейса 7, шестой контакт через диоды 62 и 61 - с восьмым и пятым входами канала интерфейса 7, седьмой контакт через диоды 60, 59 и 58 - с восьмым, седьмым и пятым входами канала интерфейса 7, восьмой контакт через диоды 57, 56 и 55 - с восьмым, шестым и пятым входами канала интерфейса, девятый контакт через /диоды 54, 53, 52 и 51 - с восьмьм, седьмым, шестым и пятым входами канала интерфейса 7.
В устройстве управления (фиг. 1) канал данных блока 1 управления соединен с каналом данных интерфейса 7 и с информационным каналом регистра- защелки 4, вход 5 которой соединен с группой младших адресов адресного канала ПЗУ 6. Старшие разряды адресного канала ПЗУ 6 соединены с младшими разрядами информационного канала с группой входов-выходов 2 блока 1 управления. Выход ПЗУ 6 соединен с каналом данных блока 1 управления.
Вход 12 является входом, воспринимающим сигналы от путевого датчика 13.
Входное согласующее устройство 1 1 служит для передачи сигналов от датчика 13 в информационный канал с первой группой входов 8 интерфейса 7. Второй информационный канал с второй группой входов 9 интерфейса 7 служит для связи с задатчиком временных интервалов 14. Выходной канал 10 интерфейса 7 соединен с выходным согласующим устройством 15, группа 16 выходов которого является входами исполнительного электропривода 17.
Входы-выходы 19 блока 1 управления (фиг. 2) служат информационной шиной обмена данными между АЛУ 18, аккумулятором 20, регистром 21 промежуточного хранения, регистром 22 команд, регистром 28 адреса, встроенным оперативным запоминающим устройством (ОЗУ) 26 данных, буфером-фиксатором
32канала вывода, буфером-фиксатором
33канала данных, таймером-счетчиком 31, счетчиком 34 команд.
Выход 23 регистра 22 команд соединен с дешифратором 24 команд, вход 27 встроенного ОЗУ 26 данных соединен с регистром адреса ОЗУ 28, выход 30 генератора 29 тактовых импульсов соединен с таймером-счетчиком 31.
В качестве блока управления может использоваться микросхема К1816ВЕ035 (однокристалльная 8-разрядная мик- роЭВМ), в качестве регистра-защелки 4 - микросхема К589ИР12, для постоянного запоминающего устройства 6 регистров), циклический сдвиг влево и вправо. сли команда двухбайтовая, то первый байт, выбранный иэ памяти, помещается в регистр 22 команд, а следуюсцш байт - в регистр 21 промежуточного хранения. После дешифрации команды начинается фаза ее выполнения.
Кроме того, что АЛУ 18 выполняет арифметические и логические операции с двоичными числами, в нем же выраба- тьюаются биты признаков, которые отг ражают условия, возникающие в процессе арифметических и логических операций. В зависимости от состояния бита признака реализуются переходы при выполнении программы. Обычно один из операндов, с которыми работает АЛУ
18, содержится в аккумуляторе 20. При выполнении операций аккумулятор 20 является регистром-источником данных (содержит операнд) или регистром-приемником (содержит результат) . Данные
| название | год | авторы | номер документа |
|---|---|---|---|
| ИМИТАТОР ИСТОЧНИКОВ РАДИОСИГНАЛОВ | 1994 |
|
RU2094815C1 |
| Измерительная система с автоматическим контролем аналого-цифрового преобразования и блок задания нечувствительности | 1991 |
|
SU1837261A1 |
| МНОГОМЕРНЫЙ СТАТИСТИЧЕСКИЙ АНАЛИЗАТОР УСРЕДНЕННОЙ МОЩНОСТИ НЕСТАЦИОНАРНОЙ НАГРУЗКИ | 1992 |
|
RU2060542C1 |
| Устройство для отладки и контроля микропроцессорных систем | 1988 |
|
SU1647568A1 |
| Мажоритарно-резервированный интерфейс памяти | 1990 |
|
SU1751766A1 |
| Устройство для сопряжения микропроцессора с системной шиной | 1990 |
|
SU1837299A1 |
| Устройство для обмена информацией междуэлЕКТРОННОй ВычиСлиТЕльНОй МАшиНОй(эВМ) и уСТРОйСТВАМи ВВОдА и ВыВОдА | 1979 |
|
SU809140A1 |
| СЛЕДЯЩИЙ АНАЛОГО-ЦИФРОВОЙ ПРЕОБРАЗОВАТЕЛЬ | 1989 |
|
RU2028731C1 |
| АВТОМАТИЗИРОВАННАЯ РЕЗЕРВИРОВАННАЯ СИСТЕМА УПРАВЛЕНИЯ ЗАПРАВКОЙ КРИОГЕННОГО РАЗГОННОГО БЛОКА | 1995 |
|
RU2084011C1 |
| Устройство для управления вводом информации | 1983 |
|
SU1161949A1 |
Изобретение относится к сельскому хозяйству, в частности к устройствам управления мобильными кормораздатчиками. Цель изобретения - повышение точности дозирования и уменьшение потерь корма. Путевой датчик 13 выдает сигнал на блок 1 управления при совмещении выгрузного шнека с соответствующим кормоприемником. Блок 1 управления дает команду через интерфейс 7 с выходным согласующим устройством 15 на электропривод 17 выгрузного шнека. Доза корма определяется задатчиком 14 временных интервалов. Цель достигается за счет того, что временные интервалы кодируются посредством включенных в определенном порядке двух многопозиционных переключателей и диодов в шестнадцатиричный код. Код временного интервала воспринимается блоком 1 управления как уставка временной экспозиции выгрузки корма. 6 ил.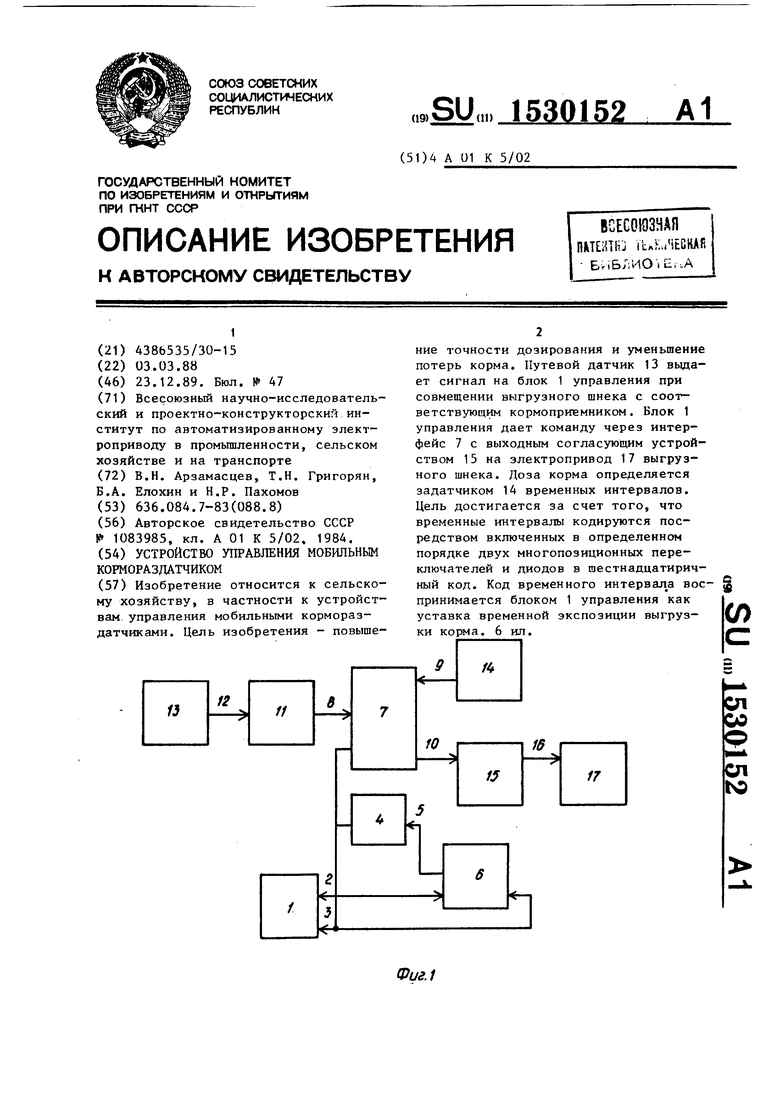
К556РТ5, интерфейса 7 - К580ИК55, при 25 входа 2 вывода и выхода 3 данных
выполнении входного согласующего устройства используется реле РЭС-64, выходное согласующее устройство 15 выполнено на микросхемах К155ТМ2, К155ЛА8, K170J1AI и реле РПГ-8.
Устройство управления работает следующим образом,
операция, которую выполняет блок 1 управления, идентифицируется
обычно проходят через аккумулятор 20
Резидентная память 26 для оперативного запоминания данных организовывается из нескольких 8-разрядных 30 слов и используется для хранения час то требуемых промежуточных результатов.
Генератор 29 тактовых импульсов, соединенный по выходу 30 с таймеромопределенным байтом информации, явля- счетчиком 31,в совокупности обеспеЮ
45
ющимся кодом команды или кодом операции. Выбор команды осуществляется следующим образом. Первоначально адрес, хранящийся в счетчике 34 команд, передается по выходу 3 через регистр- защелку 4 в ПЗУ 6, из которого адресованный байт команды возвращается в блок 1 управления, который запоминает его в регистре 22 команд. Код команды, записанный в регистре 22 команд, поступает по выходу 23 в дешифратор 24 команд, где преобразуется в выходные сигналы, которые управляют функциями АЛУ 18. АЛУ 18 выполняет арифметические и логические операции с двоичными числами: принимает 8-раз- рядные слова данных от одного или двух источников и генерирует 8-разрядный результат под управлением сигналов дешифратора 24 команд. АЛУ 18 5 может выполнять функции сложения с пе- реносом или без него, операции И, ИЛИ, ИСКЛЮЧАЮЩЕГО ИЛИ, инкремеНтиро- вание (декрементирование содержимого
чивает инициализацию работы устройст ва управления, подсчет внешних событий и получение точных временных интервалов .
Задатчик 14 временных интервалов (фиг. 3) выполнен по схеме кодирова- ния цифр двумя многопозиционными пер ключателями 35 и 36, которые совмест но с диодами 37-71 выдают восьмиби товый код двух цифр в. шестнадцатирич ном исчислении в заданных пределах, соответствующих позициям переключате лей 35 и 36. Код набранного числа по ступает через группу входов 9 на ин- 50 терфейс 7 и через него на вход блока 1 управления, который воспринимает его как уставку для своих внутренних часов (таймера 31).
С помощью переключателя 35 можно реализовать числа О, 1, 3, 5, 7, 9, 11, 13 и 15 в шестнадцатиричном коде которые воспринимаются блоком 1 управления как уставки для значений временных интервалов, в заданных пре
обычно проходят через аккумулятор 20.
Резидентная память 26 для оперативного запоминания данных организовывается из нескольких 8-разрядных слов и используется для хранения часто требуемых промежуточных результатов.
Генератор 29 тактовых импульсов, соединенный по выходу 30 с таймеромсчетчиком 31,в совокупности обеспе
чивает инициализацию работы устройства управления, подсчет внешних событий и получение точных временных интервалов .
Задатчик 14 временных интервалов (фиг. 3) выполнен по схеме кодирова- , ния цифр двумя многопозиционными переключателями 35 и 36, которые совместно с диодами 37-71 выдают восьмибитовый код двух цифр в. шестнадцатиричном исчислении в заданных пределах, соответствующих позициям переключателей 35 и 36. Код набранного числа поступает через группу входов 9 на ин- терфейс 7 и через него на вход блока 1 управления, который воспринимает его как уставку для своих внутренних часов (таймера 31).
С помощью переключателя 35 можно реализовать числа О, 1, 3, 5, 7, 9, 11, 13 и 15 в шестнадцатиричном коде, которые воспринимаются блоком 1 управления как уставки для значений временных интервалов, в заданных пределах, например 1, 3, 5 - 15 с (или 0,1; 0,3; 0,5 - 1,5 с), а с помощью переключателя 36 можно реализовать интервалы 15, 30, 45 - 135 с (или 1,5 3,0; 4,5 - 13,5 с) в зависимости от требуемой точности дозирования.
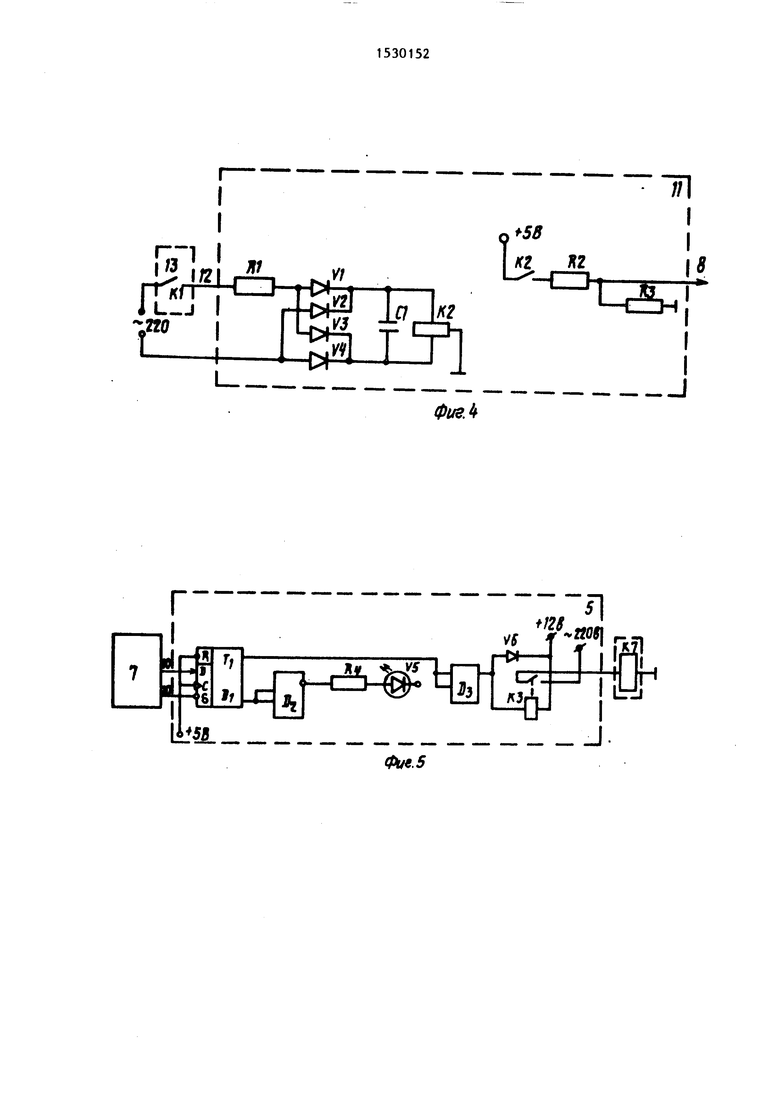
На фиг, 4 представлен вариант входного согласующего устройства 11, содержащего резисторы R1-R3, диоды V1-V4, конденсатор С1, реле К2; на фиг. 5 - вариант выходного согласующего устройства 15, содержащего триггер D1, элемент И (D2), усилитель из, резистор Р4, светодиод V5, диод V6, реле КЗ.
Выходное согласующее устройство (фиг. 5) предназначено для нормализации и преобразования входных сигналов до уровня и рода тока, определяемого организацией блока 1 управления. Так при замыкании контакта К1 путевого датчика 13 упора кормушки напряжение В после элементов ограничения R1, выпрямления V1-V4 и сглаживания пульсаций С1 включает реле К2, обеспечивая гальваническую развязку входного датчика К1 от логической части схемы. Контакт реле К2 через нормализующий делитель напряжения R2 и R3 обеспечивает конкретную реализацию информации на уровне интерфейса 7.
На фиг. 5 представлен вариант выходного согласующего устройства 15. Информация, поступающая через канал 10 от интерфейса 7, включает через триггер D1 и элемент И (D2) элемент индикации светодиод V5, а через усилитель ВЗ-реле КЗ, которое своим контактом включает магнитный пуска- тель исполнительного электропривода 17.
При движении кормораздатчика по рельсам путевой датчик 13 положения кормораздаточной тележки входит в контакт с упором, установленным у кормушки, вырабатывая через входное согласующее устройство 11 команду, которая через интерфейс 7 поступает в блок 1 управления,инициализируя выработку команды на остановку кормораздаточной тележки, в соответствии с программой, заложенной в ПЗУ 6. Эта информация поступает через интерфейс 7 в выходное согласующее устройство 15, с помощью которого осуществляется управление электроприводом 17
Затем в соответствии с программой ПЗУ 6 блок 1 управления вьфабатывает
сигнал разрешения выгрузки корма на временную экспозицию, задаваемую t помощью задатчика 14 временных интервалов.
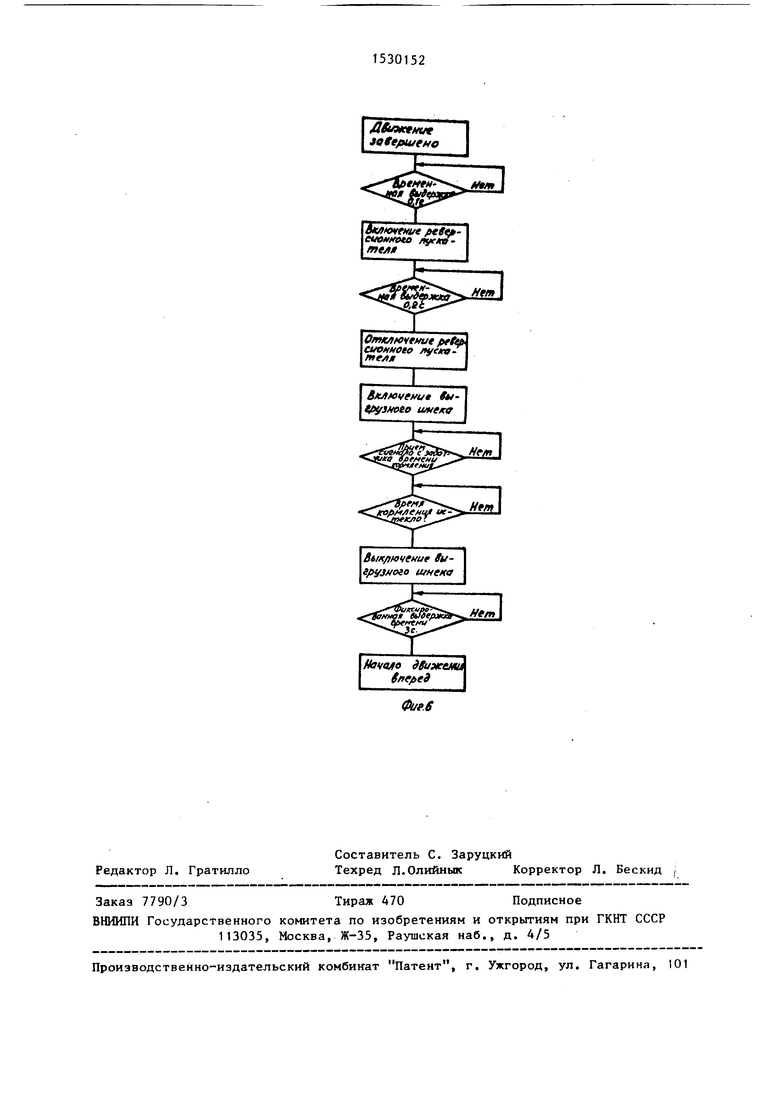
Алгоритм (фиг. 6) функционирования системы управления, заложенный в ПЗУ 6, содержит также предписание на выработку временной экспозиции, необходимой для уверенного отделения корма и предписание для реализации торможения путем включения реверсивного пускателя, т.е. торможения противовклю- чением.
Формула изобретения
Устройство управления мобильным кормораздатчиком, содержащее путевой датчик, блок управления, задатчик временных интервалов и электропривод выгрузного шнека, отличающее с я тем, что, с целью повышения- точности дозирования и уменьшения потерь корма, оно снабжено интерфейсом с входным и выходным согласующими устройствами, регистром-защелкой и постоянным запоминающим устройством, причем путевой датчик соединен с первой группой входов интерфейса через входное согласующее устройство, задатчик временных интервалов соединен со второй группой входов интерфейса, группа выходов которого через выходное соглас пощее устройство связана с электроприводом выгрузного шнека, вместе с тем, первый канал блока управления соединен с соответствующими входами интерфейса, постоянного запоминающего устройства и регистра-защелки, вход которого связан с выходом постоянного запоминающего устройства, ввод-вывод которого соединен с соответствующим каналом блока управления, при этом задатчик временных интервалов снабжен двумя многопозиционными переключателями и диодами, причем входы второй группы входов интерфейса соединены с соответствующими контактами многопозиционных переключателей через встречно включенные диоды в определенном порядке, соответственно с контактами первого многопозиционного переключателя: четвертый вход - с первым, вторым, четвертым, шестым и восьмым контактами; третий вход - с вторым, пя- TbtM и шестьм контактами; второй вход
с третьим, четвертым, пятым и шестым контактами; первый вход - с седьмым и восьмым контактами, и второго многопозиционного переключателя: пятый вход - с шестым, седьмым, восьмым и девятым контактами; шестой вход - с четвертым, пятым, восьмьм и девятым контактами; седьмой вход - со вторым.
третьим, четверт1.1М, пятим, седьмым и девятым контактами; восьмой вход - с первым, третьим, четвертым, пятым, шестым, седьмым, восьмым и девятым контактами, кроме того, подвижные контакты обоих многопозиционных переключателей соединены с плюсом источника питания.
Фиг.1
И/
I
ФиеЛ
Ф.5
1П
Ь«
яг
а к2
&
Л
Ш
I J.
liyj
ХТАОИПРАКЛГ
foffflUff e
омючени
нуепГтеля
O/mutfcytHut oete сиенноео /tyeioffffAM
BMfovfffue Л/- sttoto шнеку
BttKflfovfHue ви- ef yjnoio UfHCKO
Начало вижеми fnffted
| Устройство управления к кормораздатчику | 1982 |
|
SU1083985A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
