СП
со о ел
о
ел
Изобрелч ние относится к транспортному машиностроению, а конкретно к машинам для трелевки и транспортировки древесины.
Целью изобретения является повышение
производительности.
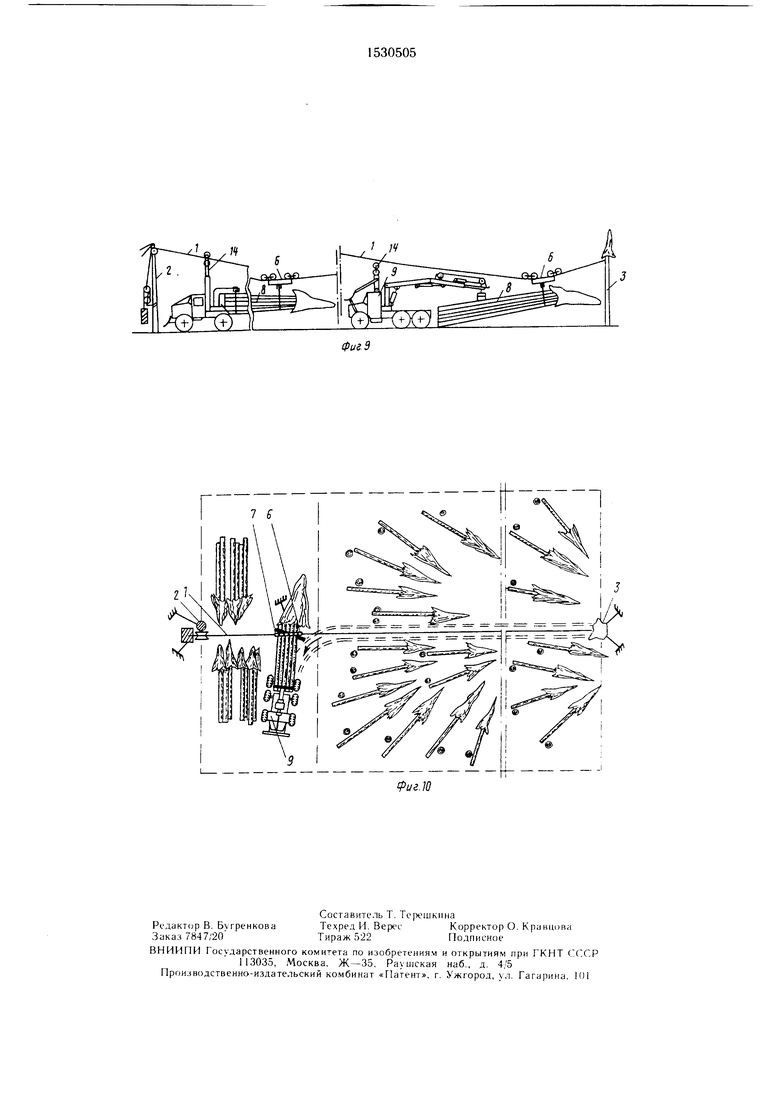
На фиг. 1 представлена общая схема установки при вертикальном размещении деревьев; на фиг. 2 - то же, при горизонтальном размещении деревьев; на фиг. 3 - конструкция блоков на стойке, вид сп(.-реди; на фиг. 4 - то же, вид сбоку; на фиг. 5 каретка с грузонесущим дугообразным элементом для вертикально размещенны.х деревьев, вид спереди; на фиг. 6 - каретка с дугооб разным элементом для вертикально разме- uieHHbix деревьев, вид сверху; на фи; . 7 - схема транспортировки пачки деревьев с использованием стойки; на фиг. 8 - то же, без использования стойки; на фиг. 9 схема совместно рабогы пакетирующей и тре,1е- вочной машин; на фиг. 10 схема разгрузки на погрузочном пункте.
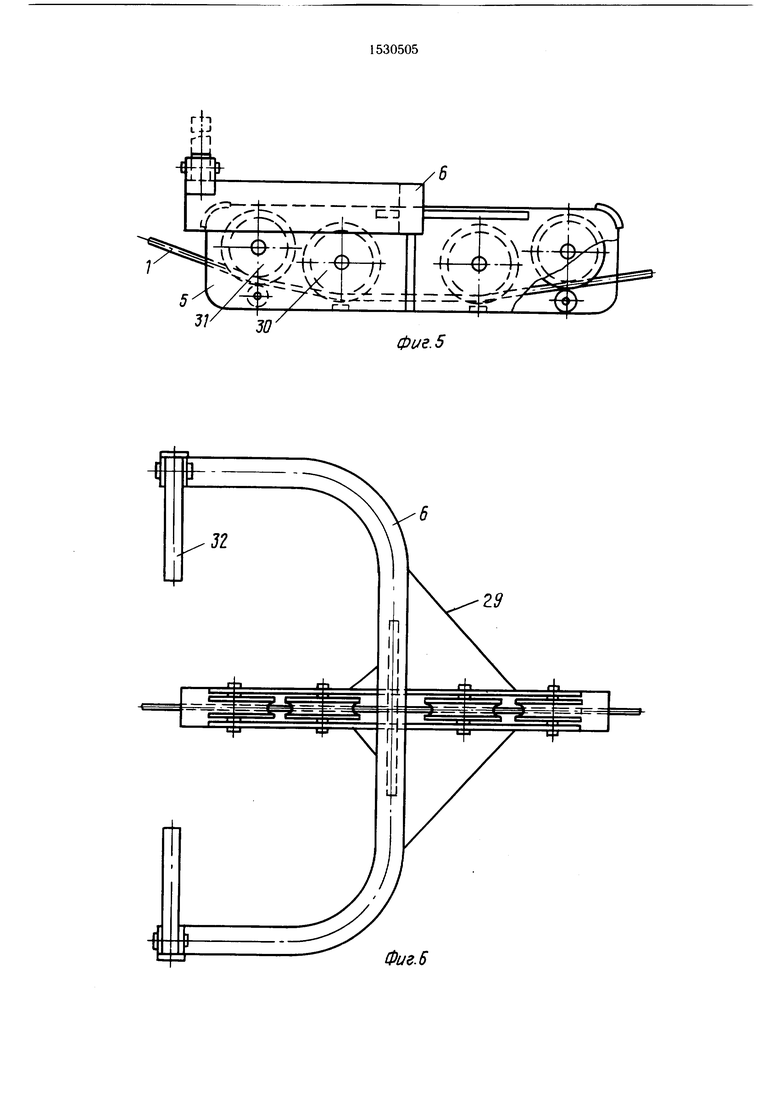
Канатная установка состоит |фи1 1) из Hecyniero каната, 1, натянутого между ста- пионарными опорами 2 и 3. Несущий канат натянут при, помощи полиспаста 4. В пролете между опорами находится каретка 5 с закрепленным на ней 1 рузонесущим дуго- образнЬ)|м э,1ементом 6, на которой наклонно, почти вертикально, опирается вершинная часть пакета 7 деревьев при верти- ка,пл1(м их размещении и ложатся на эле- М(М1Т (), при горизо){тальном размещении деревьев (фи1 . 1 и 2).
Вто)ой основной частью установки является валочно-пакетирующая и трелевочная самоходная масса 8, которая снабжена .. с- piiihibiM гидроманип , зятором 9 со срезающим механизмом К) при вертикальн(;м размещении Д1 рсмгпев 4, обор /дована самосва.и-. ным кучовом 11 с гидро11р 1водом Г1)авле ния (фиг, 1), вк,1ючающим гидп Пилип.1- piii 12. l(),i к чова 11 выпо. щен насечкой, во избежание скольжения ств(),1О1. по дну при ук,.
К.1еп, 1ение дугообразного элеме)1га ti к каретке 5 парнирное, на вертика.1ьной расположенной оси. допускаклпес поворот его в горичопта-льной п;1оскости на 90 в каждую стор(Щ, при ориз(яггальном ра;1Ме- щении деревьев. На самоходном шасси за ,1ен вто)ой дуюобразный элемеш К
11ри (ричон гальном pa3Menieiiiiii деревьев дуг(.ч)бразпый э, 1емент 13 размещен в ве|)- тикальной понеречной плоскости, па(К):11ель- пой П.10СКОСТИ 1)азмеп;ения дугиобра ;.чо; .) элемента fi (фиг. 2).
При вертика. ьном размеп1ении деревьев .1уг(.)образный элемент 13 разме це1 в roiui- зонтальной плоскости парал.и льнои n.ioi,- кости размещения дуг ообра iiic/ro э; ем.Ч1 та (i (фиг. 1 ).
Л.1Я ио.и аскивапия удаленньгх о ; Hecvnie-- I o каната I CTBO,IOB iia одной пл секпий гид5
0
5
0
0
5
0
Б
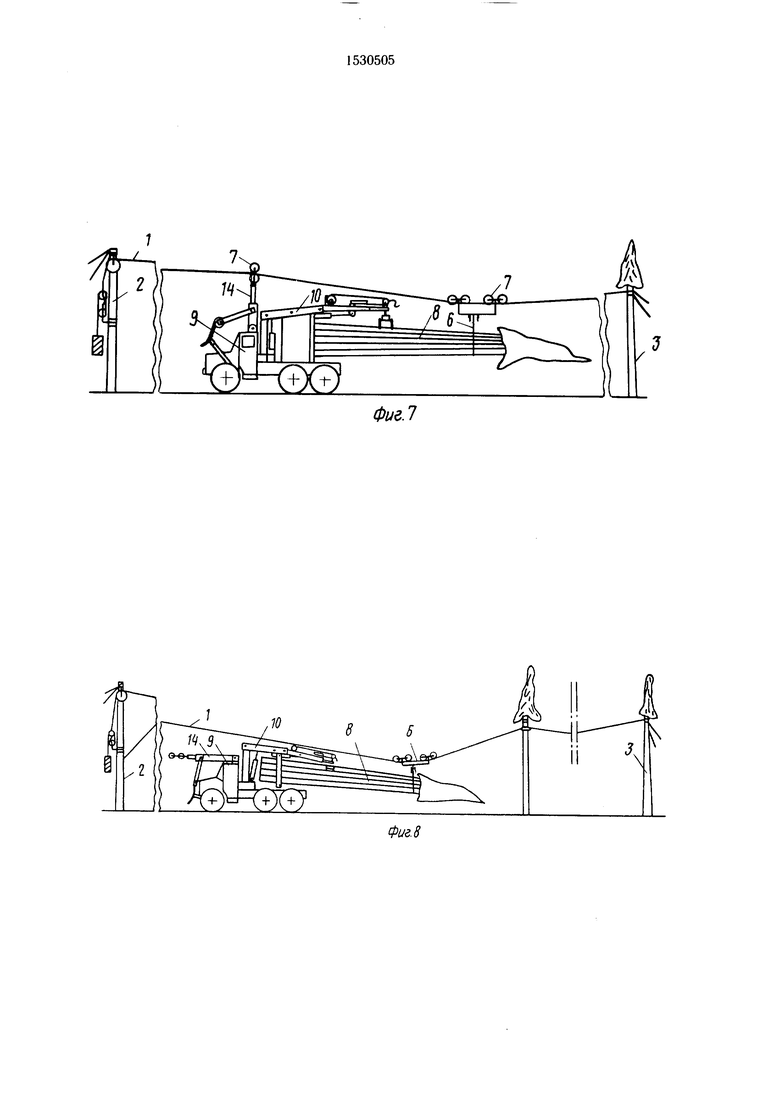
романипулятора У расположена гидравлическая лебедка, свободный конец каната которой пропущен через блок 14 и заканчивается чокером (фиг. 7).
Самоходное шасси оборудовано телескопической стойкой 15, прикрепленной к его раме 1парнирно для перевода в транспортное положение гидроцилиндром, расположенным под рамой шасси 8, которое может быть оборудовано отвалом 16.
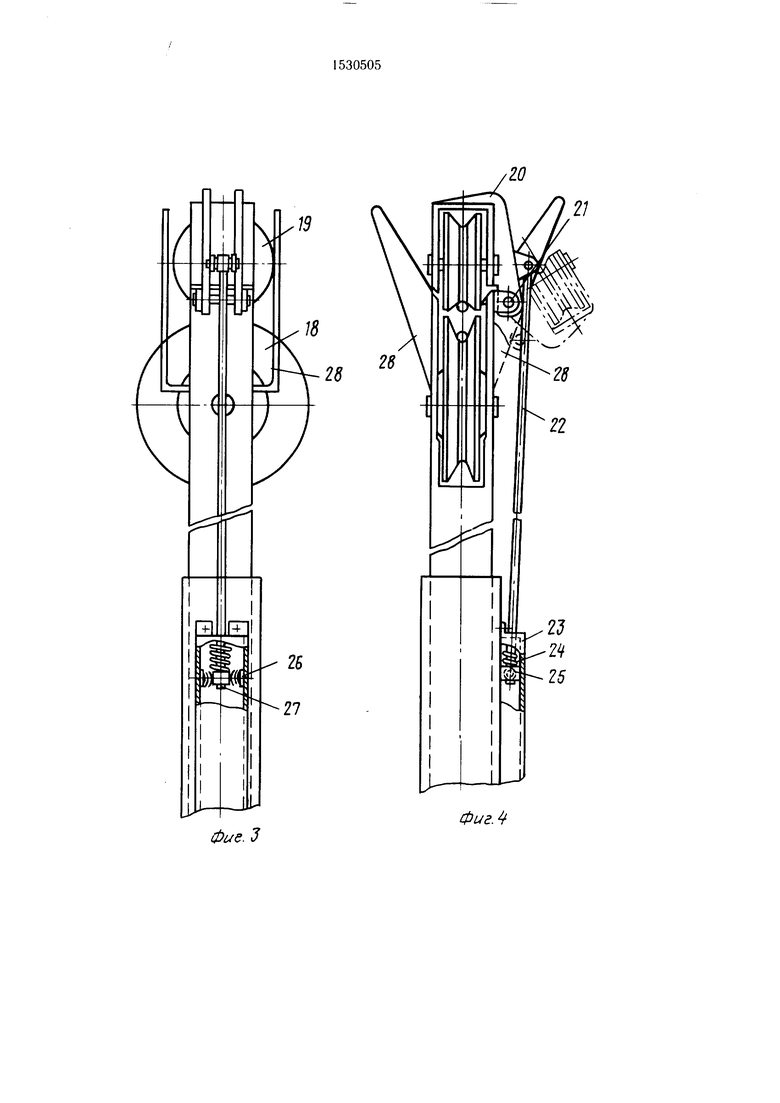
В верхней части стойки 15 расположено устройство 17, включающее несущие ролики, предназначенные для размещения между ними несущего каната 1, а также для соединения и отсоединения его от машины по команде оператора.
Это устройство (фиг. 2 и 3) состоит из опорного ролика 18 и открывающегося ролика 19, закрепленного с возможностью поворота в вертикальной поперечной плоскости, боковые щеки которого при помощи кpoнцJтeйнoв 20 установлены на щарнир 2L В свою очередь кронп1тейны 20 соединены при помощи тяги 22 с механизмом открытия-закрытия ролика 19, действующего от относительного смещения внутренней и наружной частей телескопической стойки 15. Этот механизм заключен в направляющую коробку 23 и включает насаженные на нижний конец тяги 22 витую пружину 24, наконечник 25, т; рельчатые пружины 26, плащ- ки 27, прижк ;аемые к боковым стенкам коробки тарельчатыми пружинами для создания определенной силы трения. Устройство снабжено ловителями каната в виде наклонных ребер 28, приваренных к верхней части стойки.
Каретка 15 с грузонесущим дугообразным элементом 6 состоит при вертикальном |1азмещении деревьев из каркаса 29, ходовых колес, из которых два внутренних коле- а. ЯО раепо,то; кены несколько ниже наружных колец 31 и грузонесущего дугообраз- жи о э.пемента 6, выполненного в форме :;обы с открывающимися только внутрь сюйками 32, предназначенными для предотвращении сползания деревьев с элемента 6, когда при транспортировке пакет находится в горизонт ально.м положении. Расположение х(1довь;х колес в каретке 5 выбрано из с i. i.if;; .:)кс11и(, равномерной их загрузки при движении с i|)y:iOM.
Устройство ;;1аботает следующим обра . М.
Р азрабо г..а ведется вдоль несупимо г.аиага i либо секторами без перестановки | оловно; опоры 2 И С перестановкой ко|1цев(.-й, либо полосами с перестановками как головной, так и тыловой опор 2 и 3. 111 и .и на полосы определяется радиусом дей- сть1-,я гид)ома,ипулятора с учетом под- IacKi iBaния , 1ебедкой. Ширина полосы может бьггь супич твенно увеличена за счет ско.Ч) |1Ц(-й астя.чк::, при помощи которой
канат отклоняется от прямолинейного направления в сторону. Установка таких временных растяжек производится впереди места работы. Вырубка леса на полосе или в секторе может производиться двояко: либо сразу на всей длине полосы до монтажа несущего каната 1, либо вначале монтируется несущий канат 1 в массиве леса и после этого производится постепенная валка леса впереди трелевочно-пакетирующей мащины (фронтальный метод работы). При работе по второму методу касание несущего каната о деревья не имеет значения, так как в канатной системе установки нет подвижных канатов, а следовательно, практически нет и износа каната от трения о стволы деревьев.
При работе устройства с вертикальным размещением деревьев (фиг. 1) несущий канат 1 пропущен через направляющие блоки 18 и 19, расположенные на стойке 15, что необходимо для обеспечения поперечной устойчивости ВПТМ. Срезанные валочным аппарато.м деревья укладываются гидроманипулятором 9, с небольщим наклоном назад (примерно 15°), одновременно в кузов II на грузонесущий дугообразный элемент 6 каретки 5. При этом деревья торцами комлей врезаются в насечку дна кузова 11, сохраняя свое положение после погрузки. Погруженный пакет комли сжимают клещевым дугообразным элементом 13, после чего он транспортируется из лесного массива.
Сбор и пакетирование пачки леса при горизонтальном размещении деревьев (фиг. 1) осуществляется треловоч но-пакетирующей мащиной при помощи гидроманипулятора 9. Деревья (хлысты) пощтучно укладываются верщинами на дугообразный элемент 6 каретки 5, а комлями в дугообразный элемент 13. Удаленные от мащины стволы и стволы неудобные для захвата гидроманипулятором 9 предварительно подтаскиваются при помощи лебедки, после чего погружаются гидроманипулятором 9. Пакетирование леса производится при поднятой стойке 15 и опирании несущего каната 1 при помощи устройства 17. Это необходимо для удержания каретки 5 на необходимой высоте, а также для лучщего обеспечения поперечной устойчивости мащины. После сжатия комлевой части пачки в элементе 13 и перевода гидроманипулятора 9 в транспортное положение производится транспортировка леса к головной опоре. Транспортировка производится под несущим канатом с поднятой стойкой 15 и с опиранием на нее несущего каната 1 (фиг. 4). При выходе на открытое пространство при транспортировке в вертикальном положении деревьев, если это диктуется обеспечением большей устойчивостью мащины или при отсоединении от несущего каната I, пакет 7 переводится из вертикального в горизонтальное положение путем наклона
0
назад кузова 11 при помощи гидроцилиндров 12. При этом так же несколько опускается стойка 15. От давления вершин деревьев стойки 32 на элементе 6 поднимутся в 5 вертикальное положение и будут препятствовать сползанию деревьев с захвата.
Разгрузка пакета на землю в этом случае выполняется следующим образом. Опусканием стойки 15 и опрокидыванием кузо- ,, ва 11, каретка 5 с элементом 6 и вершиной частью пакета 7 опускается на землю. Далее, nakeT стаскивается с элемента 6, предварительно зафиксированного соединением с анкерной опорой (пнем) на земле. После этого несущий канат I освобождается из устрой5 ства 17 путем раздвижения стойки 15. При этом ролик 19 откроется, вращаясь относительно щарнира 21 при помощи тяги 22, на которую передается усилие от аппарата трения, заключенного в коробке 23 и состоящего из деталей 25-27. Пружина 24 срабатывает только при предельном раздвижении стойки, от деформации ее передастся сигнал оператору электрическим путем, одной из известных конструкций. После этого производится дальнейщая транспортировка пакета
5 его разворотом к месту щтабелевки. После чего освобождается дугообразный элемент 6 и пачка полностью опускается на землю. При транспортировке в горизонтальном положении деревьев практически вся нагрузка от пачки леса передается на самоходное liiac0 си 8 и ее ходовую часть. При транспортировке без опирания несущего каната I на стойку 15 последняя опускается или складывается в транспортное положение (фиг. 8) В этом случае Сопротивление движению мащины с грузом определяется сопротивле5 нием движению машины с ко.млевой частью пачки 7 и сопротивлением движению каретки 5 по несущему канату 1. Однако этот случай транспортировки возможен при небольших пролетах несущего каната 1 (короткие
0 лесосеки или при работе с промежуточными опорами). В случае (фиг. 6) при помощи пакетирующей мащины формируются пачки с укладкой верщин деревьев (хлыстов) на каретку 5, а комлей на землю под углом к волоку. Стойка 15 применяется в случаях необ5 ходимости удержания каретки 5 в воздухе и для лучщего обеспечения устойчивости машины. Трелевочная машина, снабженная стойкой 15, предназначена для укладки комлей в дугообразный элемент 13 и для транспортировки леса на погрузочную площадку.
0 Усилие для движения каретки 5 во всех случаях передается через стволы деревьев,- которые удерживаются на дугообразном элементе 6 силой трения. Перед разгрузкой несущий канат 1 освобождается. Освобождение несущего каната осуществляется путем поднятия верхней части стойки 15 механизмом телескопа по команде оператора. При этом от аппарата трения, заключенного в
коробке 23, усилие передается через тягу 22 на кронштейны 20. В результате ролик 19 откроется, вращаясь относительно шарнира 21. В коробке 23 сила трения создается прижатием плашек 27, насаженных на наконечник 25, к стенкам коробки при помощи тарельчатых пружин. В верхней части коробки предусмотрена установка предохранительной пружины 24, деформация которой сигнализирует по электрической цепи о предельном выдвижении телескопа, во избежании поломки узла открывания. Сила трения выбрана с таким расчетом, чтобы ролик 19 не открывался от случайных колебаний несущего каната 1.
Открытие ролика 19 может произойти автоматически при подходе к опоре 2, если она выше стойки 14 и несущий канат 1 на ролике 19 получит обратный перегиб. Открытие произойдет от давления несущего каната 1, когда оно достигнет установленной величины.
Далее трелевочно-пакетирующая машина (фиг. 10) разворачивается перпендикулярно к несущему канату 1. При этом про- ис.ходит поворот на 90° дугообразного элемента 6 относительно каркаса каретки 5, который после этого крепится за анкер, находящийся на земле. Повернутый таким образом пакет 7 стаскивается с дугообразного элемента 6 при дальнейшем движении машины и затем опускается на землю при открытии дугообразного элемента 13. Разгрузка пакета 7 может производиться на обе стороны от несущего каната 1. Древесина, доставленная на погрузочную площадку, расположена удобно для последующей погрузки в транспортные средства. После завершения разгрузки трелевочно-пакетирующая машина возвращается к месту нового формирования пачки на лесосеке. Все операции выполняются в обратном порядке, а именно, происходит разворот машины, присоединение к сцепному прибору машины каретки 5 при помощи отрезка каната и движение машины на лесосеку под несущим канатом 1. По достижении места, где провес несущего каната достигает уровня стойки 15, осуществляется захват несущего каната 1 устройством 17. После попадания каната I в пространство между ребрами 28 ловителя и укладку на ролик 18, стойка 15 опускается и ролик 19 закрывается.
10
Формула изобретения
0
1.Устройство для транспортировки деревьев, содержащее протянутый между стационарными опорами несущий канат, самоходное щасси с закрепленной на нем изме5 няемой по высоте стойкой, смонтированные на ней направляющие ролики для размещения между ними несущего каиата, один из которых закреплен на стойке с возможностью поворота в вертикальной поперечной плоскости, и приспособление для подтаскивания деревьев, отличающееся тем, что, с целью повыщения производительности, оно снабжено двумя дугообразными элементами для охвата комлей и верщин деревьев, первый из которых закреплен на щас5 си, а второй - на каретке, которая установлена подвижно на несущем канате, при этом приспособление для подтаскивания представляет собой манипулятор.
2.Устройство по п. 1, отличающееся тем, что дугообразные элементы размещены в
0 вертикальных поперечных плоскостях.
3.Устройство по п. 2, отличающееся тем, что второй дугообразный элемент закреплен на каретке с возможностью поворота в горизонтальной плоскости на щарнире с вертикально расположенной осью.
5 4. Устройство по п. 1, отличающееся тем, что дугообразные элементы размещены в горизонтальных плоскостях.
5. Устройство по пп. 1 и 4, отличающееся тем, что на шасси закреплен самосвальный
д кузов для размещения в нем комлей деревьев.
«NJ
X
19
ие. J
2/
Фиг.
J...1
/
:
х
Г.
sTV
VL//
5К
J
/
d-D
Г
ф:
а.
фиг. 5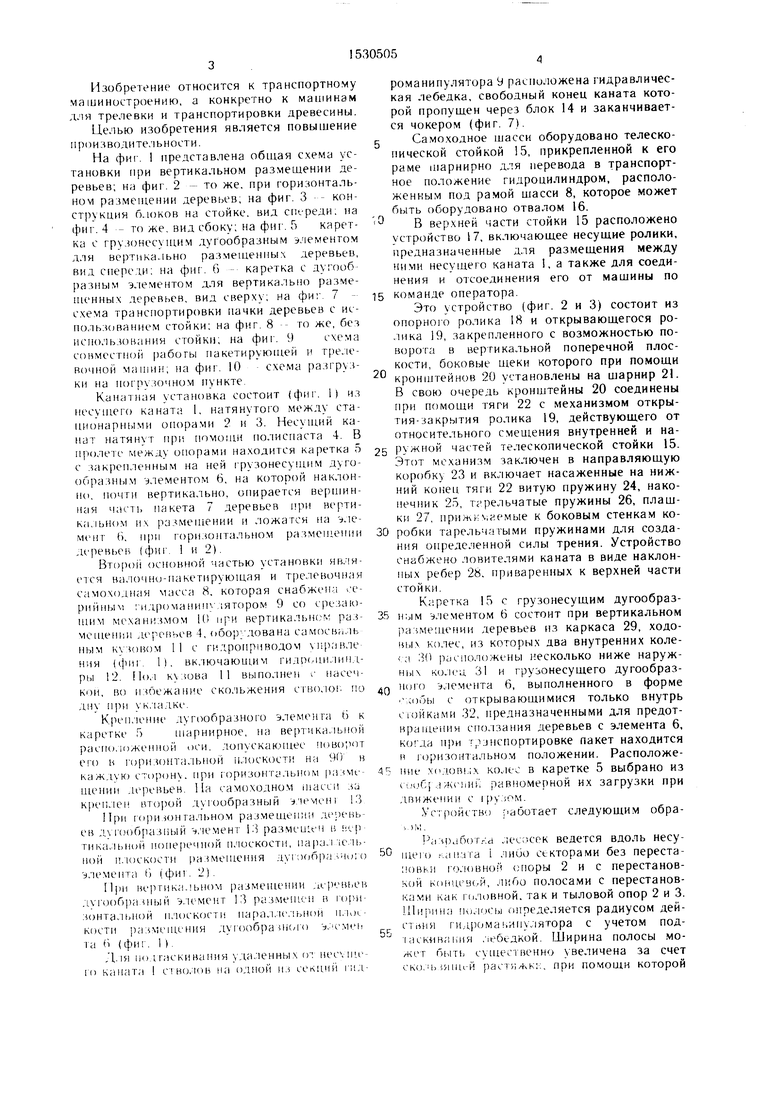
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ заготовки древесины на горных склонах и устройство для его осуществления | 1990 |
|
SU1793856A3 |
| ЛЕСОЗАГОТОВИТЕЛЬНАЯ МАШИНА | 1992 |
|
RU2068634C1 |
| Лесозаготовительная машина | 1982 |
|
SU1080791A1 |
| Способ разработки лесосеки | 1982 |
|
SU1126246A1 |
| Лесозаготовительная машина | 1984 |
|
SU1199618A1 |
| Машина для трелевки хлыстов или деревьев | 1983 |
|
SU1150122A1 |
| МАШИНА ВАЛОЧНО-ПАКЕТИРУЮЩАЯ | 2007 |
|
RU2341955C1 |
| МАШИНА ДЛЯ БЕСЧОКЕРНОй ТРЕЛЕВКИ ДЕРЕВЬЕВ | 1973 |
|
SU405504A1 |
| ЛЕСОЗАГОТОВИТЕЛЬНАЯ МАШИНА | 1998 |
|
RU2130249C1 |
| СПОСОБ И МАШИНА ДЛЯ ФОРМИРОВАНИЯ ПАЧЕК ДЕРЕВЬЕВ | 2007 |
|
RU2355161C2 |
Изобретение относится к устройствам для транспортировки деревьев. Целью изобретения является повышение производительности. Устройство содержит несущий канат 1, протянутый между стационарными опорами 2 и 3, самоходное шасси 8 с гидроманипулятором 9, имеющим срезающее устройство 10. На несущем канате 1 закреплена каретка 5 с дугообразным элементом 6 для вершин деревьев пакета 7. На самоходном шасси 8 закреплен дугообразный элемент 13 для комлей деревьев и телескопическая стойка 15 с устройством 17 под несущий канат 1. Устройство 17 содержит направляющие ролики, один из которых закреплен с возможностью поворота в вертикальной поперечной плоскости. Дугообразные элементы 6 и 13 размещены в параллельных плоскостях. На шасси 8 закреплен самосвальный кузов 11 для размещения комлей деревьев, связанный с гидроцилиндром 12 его поворота. 4 з.п. ф-лы, 10 ил.
Фиг. 6
ФигЛ
| 1973 |
|
SU435969A1 | |
| Устройство для сортировки каменного угля | 1921 |
|
SU61A1 |
| Патент США № 4005779, кл | |||
| Приспособление для записи звуковых колебаний | 1921 |
|
SU212A1 |
| Патент США № 3850304, кл | |||
| Приспособление для записи звуковых колебаний | 1921 |
|
SU212A1 |
