А - А
(Л
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для одновременного снятия початков и надевания патронов на веретена кольцепрядильных и крутильных машин | 1958 |
|
SU119819A1 |
| Веретено двойного кручения | 1948 |
|
SU81159A1 |
| ТЕЛЕСКОП | 2002 |
|
RU2227925C2 |
| УСТРОЙСТВО ДЛЯ НАРЕЗАНИЯ РЕЗЬБЫ НА КОНЦАХ ТРУБ | 2005 |
|
RU2297306C1 |
| Прибор для измерения радиальных зазоров шариков или роликов в собранном подшипнике | 1958 |
|
SU120013A1 |
| УСТРОЙСТВО ДЛЯ ИЗГОТОВЛЕНИЯ ИЗ КОНСТАНТАНОВОЙ ПРОВОЛОКИ СКОБОК И ВСТАВКИ ИХ В АСБЕСТОВЫЕ КОРОБКИ ТЕРМОБЛОКОВ | 1956 |
|
SU108681A1 |
| ЗАМОК ДЛЯ СОЕДИНЕНИЯ БОРТОВ ФОРМЫ | 1991 |
|
RU2020062C1 |
| МАЛОГАБАРИТНАЯ ХЛОПКОПРЯДИЛЬНАЯ МАШИНА ДЛЯ ВЫРАБОТКИ ПРЯЖИ ИЗ ЛЕНТЫ | 1952 |
|
SU98484A1 |
| Строповочный замок | 1980 |
|
SU933603A1 |
| Устройство для тренировки пловцов | 1988 |
|
SU1567228A1 |
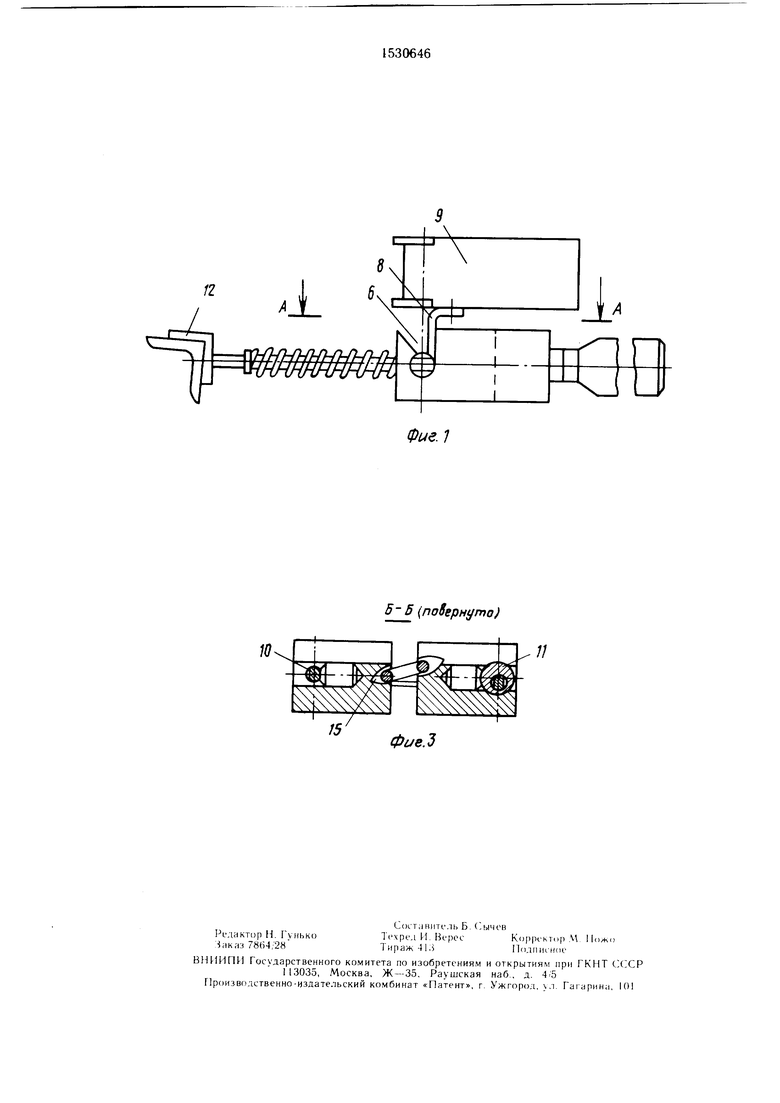
Изобретение относится к креплению измерительных датчиков на кольцепрядильных машинах и позволяет снизить трудоемкость эксплуатации, уменьшить габариты и материалоемкость держателя датчика. Держатель датчика включает механизм наклона, выполненный в виде двух Г-образных кронштейнов с цилиндрическими подпятниками 7, расположенными в отверстиях основания 1, и два подпружиненных штока 3 с Г-образными упорами. Угол наклона датчика фиксируют вращением зажимной рукоятки 2 и воздействием эксцентрика 11 на торцовую поверхность одного из цилиндрических подпятников 7 Г-образных кронштейнов. Держатель датчика устанавливается на планке 16 кольцепрядильной машины при помощи прижатия подпружиненных штоков 3 к планке 16 и фиксации нитепроводника 17 в выточках 15 центрального отверстия 13. 3 ил.
сд
со О О5
С5
Изоорогеиис относится к креплению из- ме1)ито.1ьны датчиков на кольцеирядильных машинах.
lU .ibKi и «)бр1 генин является снижение т)доемкости jKt ikiуагации, уменьн1ение га- ()1 н материалоемкости.
Па ipMi. 1 и «)Г))аже11 держатель датчика. оби1ий вид; на ifm - - -- разрез Л-А на фиг. 1; на |()иг. . разрез Б- Б на фиг. 2
Лержак Л, дагчика вк.чючаег (кчювание 1 чажимнчк) рукоятку 2 и параллельные HITO- ки . i, нод||ружиненнь1е нружинами 4. Основание 1 имеет ()гверс1ия 5 с прорезями Н. В от- л рстия Г) помещены с возможностью вра- :11ения цилиндрнческие подпятники 7 Г-об- )азны. KpoHiHTeiiHoB 8, к верхней части ко- Жестко п)ИК)еп;|ен дагчик 9. Штоки 3 |)а (MiMHcHi, паралле.тьно, нричем их оси пер- пендикулярпы осям вращения Г-образных к|)()И S. Шгоки i5 имеют лыски 10 и усгановлены с возможностью поступательного пе Ч кмпсния отпосительно основания 1. 11рп :)Г()м на одном из Н1ТОКОВ 3 с возможное II,H) lipaineiiiiH и контакта с торном нод- пятника 7 ОДНО о из Г-образных кр() tioB 8 установ. К И эксцентрик 11, жестко диненн1 и1 с зажимHoii рукояткой 2. К кон- с(1,|ьным краям пггоков 3 ненодвижно нри- соедннены -об)а/1Ные 12. Основанне 1 счте})жит 11ентра. 1Ы1ое отверстие 13 с на- (|)1 14. 1 lei i |)а.Ы1ое отверстие 13 имеет на lifiy Ipeiineii noHcpxKoc in выточки 15, lacno- .|ожеп П,1е но обеим ст())онам паза 14.
Лс )/ка re. ib да|Чика работает с ледук п1им оГ))азом.
Держа 1 ел|, да I чика монтируется на ii. iaH- ке М) в непос|1едственном контакте с ните- проводинком 17. Л, 1я () -образные уно- pi.i 12 HI ГОКОВ 3 упирают в 1ланку 16 п п)о- .1.олы11,1м дав.1сч1И1 м руки сжимают пружины 1 п одп()вре чм1но заводят нитепроводник 17 и выточки I.) центра. 1ьног() отверс ия 13. При юм пожка 18 нн гепроводника 17 входит в паз 14 11е1ггралы1ог() отверстия 13 основания 1. Гакам нрои;(1 одится фиксация держаге. 1я да1чика на ii;ianKe 16 кольне- |||П1Д1Г1Ы101 ма1пииы (не ноказана)
П)оводя1 подстройку и фиксацию угла наклона датч1 ка 9. Для утого датчик 9 на- к,loпякJT на угол, при котором нряжа (не показана) проходит но отнс)1нению к датчику 9 в cooTBCTciBnn с Т1)ебова 1ия.ми, обус-товлен- пымп обязапностями его конструкции. Пзме
0
5
0
5
0
5
0
нение угла наклона Г-образных кронштейнов 8 ограничивается размерами прорезей 6. После этого, вращением зажимной рукоятки 2 фиксируют угол наклона датчика 9 посредством воздействия эксцентрика 11 на торцевую поверхность одного из цилиндрических подпятников 7 Г-образных кронгптейнов 8, помещенных в отверстиях 5.
Лыски 10 на штоках 3 препятствуют их вращению и обеспечивают возможность их поступательного перемещения. Для съема держателя датчика с планки 16 кольцепря- ди;1ьной машины все перечисленные опера ции выполняются в обратной последователь- }1ости: вначале нажимной рукояткой 2 ослабляют давление эксцентрика 1I на подпятник 7 и переводят датчик 9 в горизон- та.т1,ное положение. Затем, сжимая пружины 4, выводят нитенроводник 17 из центральною отверстия Г5.
Формула изобретения
/1ержа1е.ь да-|чика для кольценрядиль- ных MaiHHH, вк:1ючаю1ций механизм наклона дагчика с зажимной рукояткой с элементами усгановки. отличающийся тем, что, с целью снижения трудоемкости эксплуатации уменьшения i абаритов и материалоемкости, механизм наклона датчика выполнен в виде двух Г-образных кронштейнов, снабженных цилиндрическими подпятниками, установленными с возможностью поворота вокруг CBoeii оси по обе стороны от центральнЪго отверстия в основа1ти, причем оси вращения Г-образных кронштейнов совпадают, а один из подпятников Г-образных кронштейнов смонти)ован с возможностью контакта своим то)цом с эксцентриком зажимной рукоятки, к)оме ТО1Ч), отверстия, в которых помещены подпятники, имеют прорези, цент- )a,iijHoe огверстие имеет паз, расположенный между элементами установки, выполненными в виде двух подпружиненных относительно основания штоков, установленных с в()зм(жностью ноступательного перемещения, на консольных концах которых жестко укреплены Г-образные упоры, при этом оси штоков параллельны между собой и перпендикулярны осям вращения Г-образных кронштейнов, кроме того, центральное отверстие основания имеет на внутренней поверхности выточки по форме нитепроводника, расположенные по обе стороны паза.
/Z
1
ФиеЛ
5-6 (повернуто)
фие.
| Jet-прибор для определения неровности массы пряжи и полуфабрикатов, укомплектованный интегратором | |||
| Проспект фирмы Metrimpex, Венгрия. |
