W imiiLt .
ift
А.Г Л 1-IT
с Ф
(Л
| название | год | авторы | номер документа |
|---|---|---|---|
| Гидравлическая система металлорежущего станка | 1986 |
|
SU1360963A2 |
| ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ СЛЕДЯЩИЙ ПРИВОД | 2006 |
|
RU2311567C1 |
| ГИДРОУСИЛИТЕЛЬ | 2006 |
|
RU2307960C1 |
| ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ СЛЕДЯЩИЙ ПРИВОД | 1987 |
|
SU1512244A3 |
| РЕГУЛЯТОР РАСХОДА | 1994 |
|
RU2092888C1 |
| СИСТЕМА СИНХРОНИЗАЦИИ ГИДРОЦИЛИНДРОВ | 1996 |
|
RU2105907C1 |
| ОГРАНИЧИТЕЛЬ МОЩНОСТИ ЭЛЕКТРОГИДРАВЛИЧЕСКОГО СЛЕДЯЩЕГО ПРИВОДА | 2006 |
|
RU2309302C1 |
| Гидравлический следящий привод | 1988 |
|
SU1560836A1 |
| Гидравлический привод металлорежущего станка | 1984 |
|
SU1236205A1 |
| Гидравлический следящий привод | 1982 |
|
SU1019117A1 |
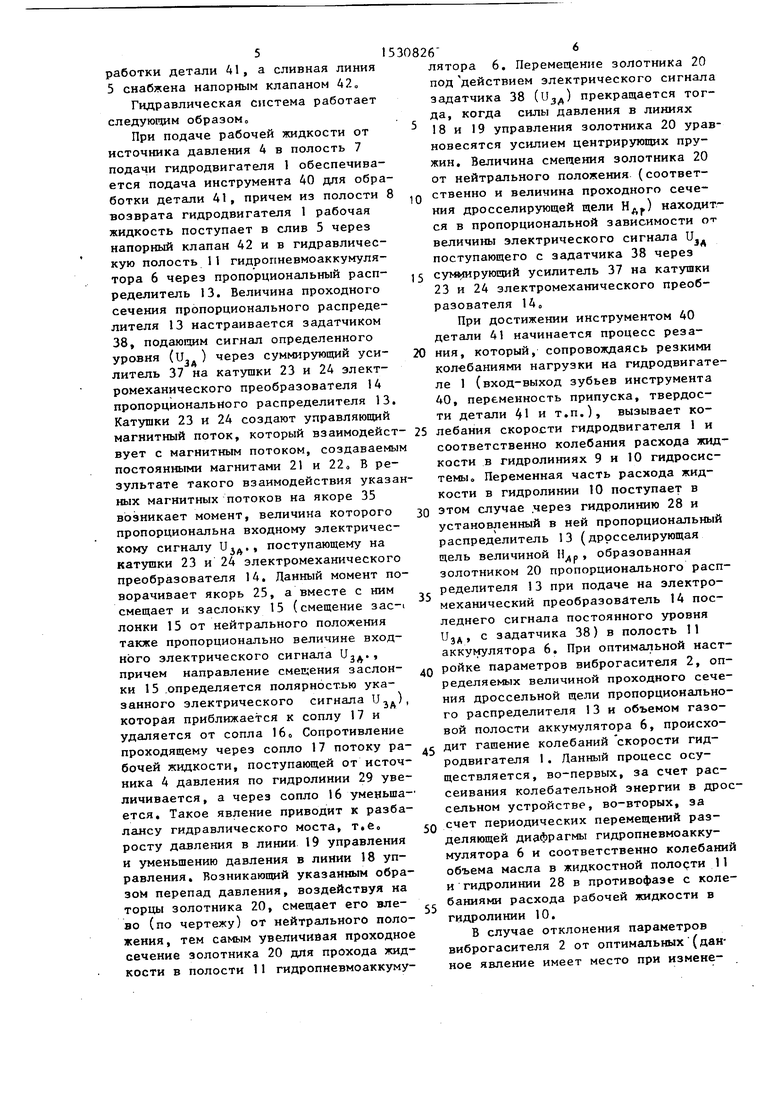
Изобретение относится к гидросистемам станков и может быть использовано в гидроприводах подачи металлорежущих станков. Цель изобретения - улучшение динамических свойств системы путем расширения частотного диапазона работы виброгасителя. Гидросистема станка содержит гидродвигатель 1 привода рабочего органа с полостями 7 и 8 подачи и возврата, реверсивный распределитель 3, источник давления 4, слив 5, виброгаситель 2, выполненный в виде гидропневмоаккумулятора 6, гидравлическая полость 11 которого подключена к полости 8 через регулирующее дроссельное устройство 12, выполненное в виде электроуправляемого пропорционального распределителя 13, система управления которого включает последовательно соединенные датчик 33 колебания скорости гидродвигателя 1, сравнивающее устройство 34 с задатчиком 35 ограничения уровня колебаний скорости, блок 36 дискретных уставок напряжения и суммирующий усилитель 37 с задатчиком 38 постоянного уровня сигнала, а выход 39 суммирующего усилителя 37 подключен к управляющим элементам распределителя 13. Процесс работы сопровождается колебаниями нагрузки и скорости гидродвигателя 1, а система управления дроссельного устройства 12 обеспечивает такое управление распределителем 13, какое создает необходимое дополнительное сопротивление выходу рабочей жидкости из полости 8 возврата гидродвигателя 1, что обеспечивает снижение уровня колебаний. 1 п.ф-лы, 5 ил.
3
щ
/2. „
НХЙ
:I
/УУГ77 ; //
PaSovaa подача
ащ
/2. „
ел
00
О
00 ю
Фие. J
версивный распределитель 3, источник 4, слив 5, виброгаситель 2, выполненный в виде гидропневмоаккуму- лятора 6, гидравлическая полость 11 которого подключена к полости 8 через регулирующее дроссельное устройство 12, выполненное в виде электро- управляемого пропорционального распределителя 13, система управления которого включает последовательно со динен ные датчик 33 колебания скорости гидродвигателя I, сравнивающее
устройство 34 с задатчиком 35 ограничения уровня колеба1Л1Й скорости, блок J5 36 дискретных уставок напряжения и
Изобретение относится к гидросистемам станков и может быть использовано в гидроприводах подачи металлорежущих станков.
Цель изобретения - улучщение динамических свойств системы путем расширения частотного диапазона работы виброгасителя,
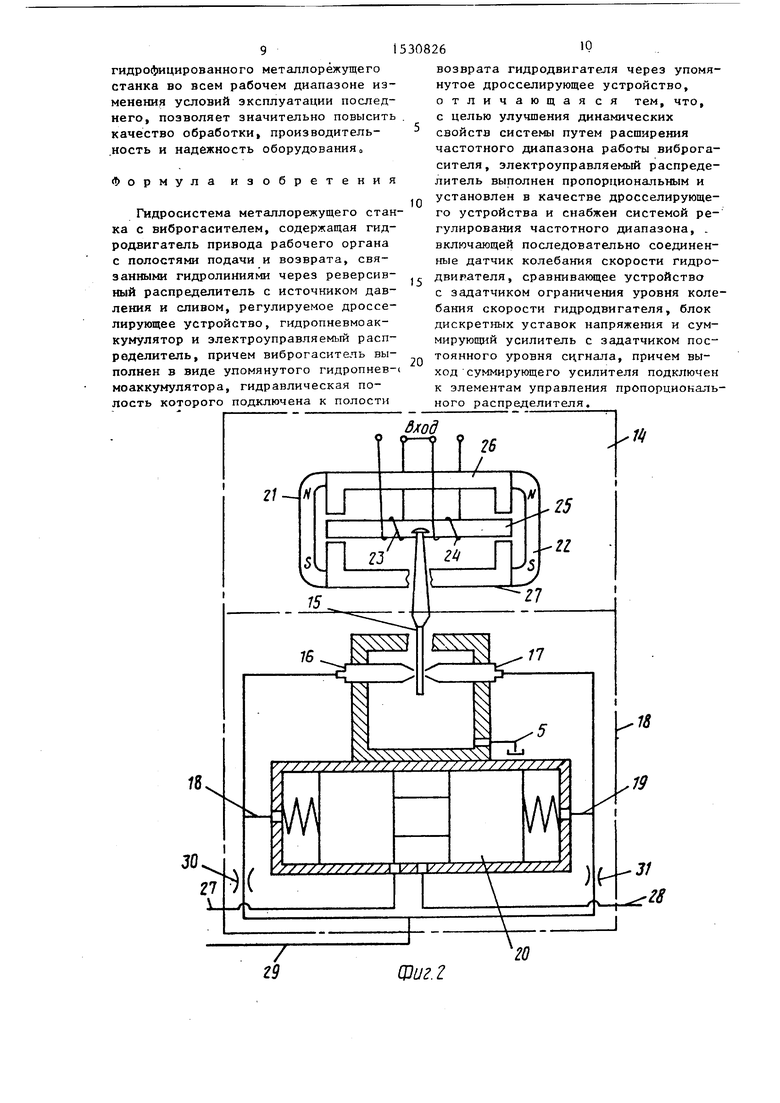
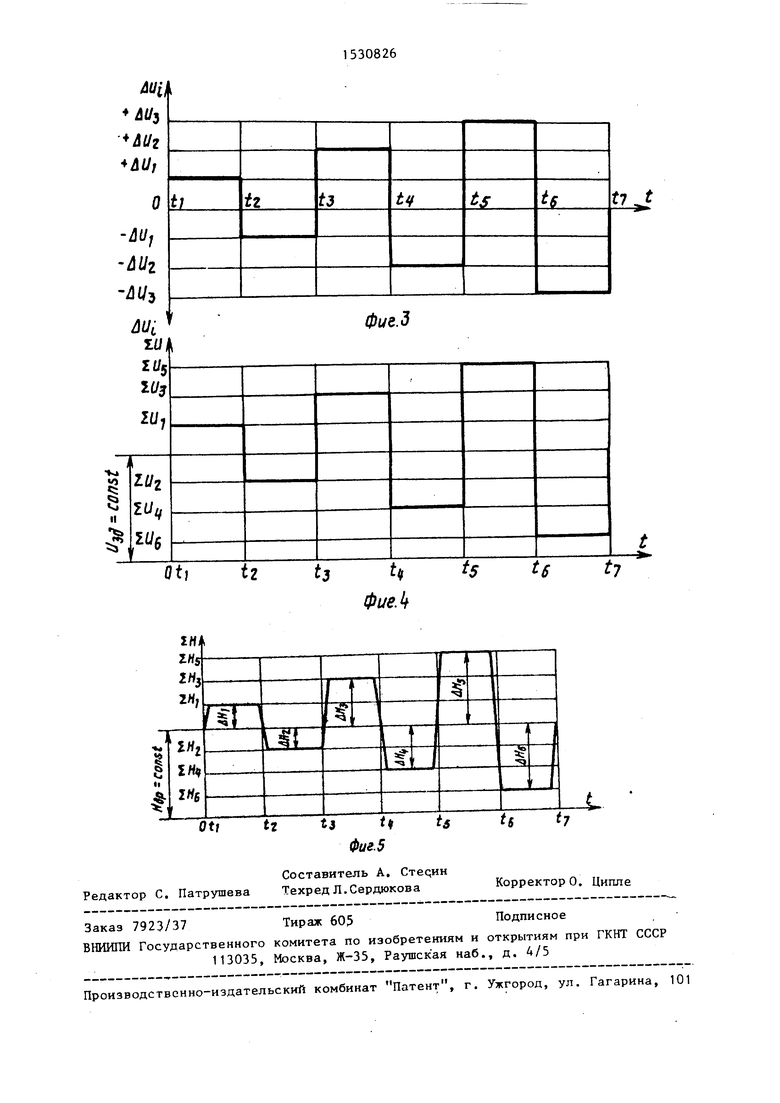
На фиг.1 приведена схема гидросистемы; на фиг.2 - электроуправля- емый пропорциональный распределитель; на фиг.З - диаграмма подачи напряжения блоком дискретных уставок на вход суммирующего усилителя; на фиг.4 - диаграмма подачи напряжения суммирующим усилителем на элементы управления пропорциональным усилителем; на фиг.5 - диаграмма изменения проходного сечения пропорционального распределителя
Гидросистема металлорежущего станка содержит гидродвигатель 1 привода рабочего органа, виброгаситель 2, реверсивный распределитель 3, источник 4 давления, слив 5, гидропнев- моаккумулятор 6.
Гидродвигатель 1 имеет полости 7 и 8 подачи и возврата, которые связаны гидролиниями 9 и 10 через реверсивный распределитель 3 с источником 4 давления и сливом 5.
Виброгаситель 2 выполнен в виде гидропневмоаккумулятора 6, гидравлическая полость 11 которого подключен через регулируемое дроссельное устройство 12, выполненное в виде элект роуправляемого пропорционального рас ределителя 13, к гидролинии 10. ПроJ5
0826 4
суммирующий усилитель 37 с задатчиком 38 постоянного уровня сигнала, а выход 39 суммирующего усилителя 37 подключен к управляющим элементами распределителя 13. Процесс работы сопровождается колебаниями нагрузки и скорости гидродвигателя 1, а система управления дроссельного устройства 12 обеспечивает такое управление распределителем 13, какое создает необходимое дополнительное сопротивление выходу рабочей жидкости из полости 8 возврата гидродвигателя 1, что обеспечивает снижение уровня колебаний 1 Поф-лы, 5-ил.
10
0
5
порциональный распределитель 13 снабжен электромеханическим преобразователем 14 (фиг,2), который управляет по- 5 ложением заслонки 15, размещенной между соплами 16 и 17, которые обеспечивают изменение давления в линиях управления 18 и 19 золотника 20,
Электромеханический преобразователь 14 содержит постоянные магниты 21 и 22, две катушки 23 и 24 и якорь 25, установленный внутри магнитопро- водов 26 и 27, причем якорь 25 связан с заслонкой 15, гидропневмоак- кумулятор 6 - с гииролинией 10 гидролинией 28,
Линии 18 и 19 управления золотника 20 соединены с источнике давления 4 гидролинией 29 через дроссели 30 и 31, а со сливом 5 - через сопла 16 и 17.,
Пропорциональный распределитель 13 снабжен системой 32 регулирования частотного диапазона работы виброгасителя 2, содержащей последовательно соединенные датчик 33 колебания скорости гидродвигателя 1, сравнивающее устройство 34, снабженное задатчиком 35 ограничения уровня колебания скорости гидродвигателя 1, блок 36 дискретных уставок напряжения и суммирующий усилитель 37, содержащий задат- чик 38 постоянного уровня. Выход 39 суммирующего усилителя 37 подключен к катущкам 30 и 31 электромеханичес- 5 кого преобразователя 14,
I
Гидродвигатель 1 обеспечивает подачу рабочего инструмента 40 для об0
5
0
работки детали 41, а сливная линия 5 снабжена напорным клапаном 42„
Гидравлическая система работает следугопщм образом.
При подаче рабочей жидкости от источника давления 4 в полость 7 подачи гидродвигателя 1 обеспечивается подача инструмента 40 дпя обработки детали 41, причем из полости возврата гидродвигателя 1 рабочая жидкость поступает в слив 5 через напорный клапан 42 и в гидравлическую полость 11 гидропневмоаккумуля- тора 6 через пропорциональный распределитель 13. Величина проходного сечения пропорционального распределителя 13 настраивается задатчиком 38, подающим сигнал определенного уровня () через суммирующий усилитель 37 на катушки 23 и 24 электромеханического преобразователя 14 пропорционального распределителя 13 Катушки 23 и 24 создают управляющий
магнитный поток, который взаимодейст- 25 лебания скорости гидродвигателя 1 и
вует с магнитным потоком, создаваемым постоянными магнитами 21 и 22, В результате такого взаимодействия указанных магнитных потоков на якоре 35 возникает момент, величина которого пропорциональна входному электрическому сигналу ., поступающему на катушки 23 и 24 электромеханического преобразователя 14. Данный момент поворачивает якорь 25, а вместе с ним смещает и заслонку 15 (смещение зас-i лонки 15 от нейтрального положения также пропорционально величине входного электрического сигнала U.., причем направление смещения заслонки 15 определяется полярностью указанного электрического которая приближается к удаляется от сопла 16о
30
35
40
U.Jсигналасоплу 17 и Сопротивление
проходящему через сопло 17 потоку ра- дит гащение колебаний скорости гид- бочей жидкости, поступающей от источ- родвигателя 1. Данный процесс осу29
соответственно колебания расхода жи кости в гидролиниях 9 и 10 гидросис темы Переменная часть расхода жидкости в гидролинии 10 поступает в этом случае .через гидролинию 28 и установленный в ней пропорциональны распределитель 13 (дросселирующая щель величиной Пд-, образованная золотником 20 пропорционального рас ределителя 13 при подаче на электро механический преобразователь 14 пос леднего сигнала постоянного уровня Uj, с задатчика 38) в полость 11 аккумулятора 6. При оптимальной нас ройке параметров виброгаситепя 2, о ределяемых величиной проходного сеч ния дроссельной щели пропорциональн го распределителя 13 и объемом газо вой полости аккумулятора 6, происхоника 4 давления по гидролинии 2У увеличивается, а через сопло 16 уменьшается. Такое явление приводит к разбалансу гидравлического моста, т.е росту давления в линии 19 управления и уменьшению давления в линии 18 управления. Возникающий указанным образом перепад давления, воздействуя на торцы золотника 20, смещает его влево (по чертежу) от нейтрального положения , тем самым увеличивая проходное сечение золотника 20 для прохода жидкости в полости 11 гидропневмоаккуму50
55
ществляется, во-первых, за счет рассеивания колебательной энергии в дро сельном устройстве, во-вторых, за счет периодических перемещений разделяющей диафрагмы гидропневмоакку- мулятора 6 и соответственно колебани объема масла в жидкостной полости 1 и гидролинии 28 в противофазе с коле баниями расхода рабочей жидкости в гидролинии IО.
В случае отклонения параметров виброгасителя 2 от оптимальных (данное явление имеет место при измене1530826
лятора 6. Перемещение золотника 20 под действием электрического сигнала задатчика 38 (U) прекращается тогда, когда силы давления в линиях 18 и 19 управления золотника 20 уравновесятся усилием центрирующих пружин. Величина смещения золотника 20 от нейтрального положения (соответственно и величина проходного сечения дросселирующей щели Нд) находится в пропорциональной зависимости от величины электрического сигнала Uj поступающего с задатчика 38 через
суммирующий усилитель 37 на катушки 23 и 24 электромеханического преобразователя 14о
При достижении инструментом 40 детали 41 начинается процесс резания, который, сопровождаясь резкими колебаниями нагрузки на гидродвигателе 1 (вход-выход зубьев инструмента 40, переменность припуска, твердости детали 41 и т.п.), вызывает комнi 30
35
40
соответственно колебания расхода жидкости в гидролиниях 9 и 10 гидросистемы Переменная часть расхода жидкости в гидролинии 10 поступает в этом случае .через гидролинию 28 и установленный в ней пропорциональный распределитель 13 (дросселирующая щель величиной Пд-, образованная золотником 20 пропорционального распределителя 13 при подаче на электромеханический преобразователь 14 последнего сигнала постоянного уровня Uj, с задатчика 38) в полость 11 аккумулятора 6. При оптимальной настройке параметров виброгаситепя 2, определяемых величиной проходного сечения дроссельной щели пропорционального распределителя 13 и объемом газовой полости аккумулятора 6, происхо0
5
ществляется, во-первых, за счет рассеивания колебательной энергии в дроссельном устройстве, во-вторых, за счет периодических перемещений разделяющей диафрагмы гидропневмоакку- мулятора 6 и соответственно колебаний объема масла в жидкостной полости 11 и гидролинии 28 в противофазе с колебаниями расхода рабочей жидкости в гидролинии IО.
В случае отклонения параметров виброгасителя 2 от оптимальных (данное явление имеет место при измене
НИИ режимов и условий резания, типа обрабатываемой детали , нагреве масла в гидросистеме, утечках газа из газовой полости аккумулятора 6, изменении объемов жидкости в гидролиниях 9 и 10 при перемещении поршня гидродвигателя 1 и т.п.) эффективность работы последнего снижается, а колебания скорости гидродвигателя 1 в свою очередь увеличиваются. Датчик 33 колебаний скорости гидродвигателя 1, регистрируя данное увеличение, вьщает соответствуюпшй сигнаа на вход сравнивающего устройства 34, где указанный сигнал датчика 33 преобразовывается и сравнивается с сигналом задатчика 35 ограничения уровня колебаний скорости (задатчик 35 предварительно настроен на сигнач, определяющий максимально допустимый уровень колебаний скорости гидродвигателя I для конкретного случая обработки на конкретном станке. При превышении величины сигнала датчика 33 сигнала задатчика 35 на выходе сравнивающего устройства 34 появляется электрический сигнал, вводящий в работу блок 36 дискретных установок напряжения. Последний выдает На вход суммирующего усилителя 37 в момент времени t, сигнал величиной + . Ц (фиг.З). Данный сигнал, алгебраически суммируясь в усилителе 37 с сиг- напом задатчика 38 (2U, U + 4U, фиг.4), поступает на катушки 23 и 24 электромеханического преобразователя 14. Под действием суммарного сигнала S и, золотник 20 пропорционального распределителя 13 сместится (не- ханизм перемещения золотника 20 под действием входного электрического сигнала U,, а также под действием входного электрического сигнала ДРУ того значения аналогичен описанному выше). Величина с- ещения золотника 20 от нейтрального положения всегда пропорциональна величине входного электрического сигнала, поступающего на катушки 23,24 электромеханического преобразователя 14 от предварительно настроенного задатчиком 38 положения в сторону увеличения проходного сечения дроссельной щели ( Z Н др + ДН.,фиг.5). Если снижения колебаний скорости гидродвигателя 1 при новой настройке виброгасителя 2 не наступает, Тое. сигнал датчика 33 все еще превышает сигнал задатчика 35,
0
0 5О .Q
блок 36 дискретных уставок напряжения выдает в момент времени t (промежуток времени dt t, - t, где n 1,2,,., предварительно настраивается с учетом динамических свойств конкретного станка, а также реального быстродействия системы регулирования 32) сигнал величиной - /jU, (фиг, З), который алгебраически суммируясь в усилителе 37 с сигналом задатчика
. 38 ( SUj Uj - ли, фиг,4), вызывает смещение золотника 20 пропорционального распределителя 13 в СТОРОНУ уменьшения проходного сечения дрос- сельной щели ( dHj фиг.5)в Если и при данной настройке
:виброгасителя 2 снижения колебаний скорости гидродвигателя 1 не происходит в достаточной мере, с выхода блока 36 дискретных уставок напряжения в момент времени t поступает сигнал + ul (фиг,3). На выходе суммирующего усилителя 37 появляется сигнал 1и, ли-2 (фиг.4), проходное сечение дроссельной щели увеличивается до величины 51П Н др + /IHj (фиг,5), и виброгаситель 2 работает уже при данной настройке. Указанный процесс настройки продо.ггжается до тех пор, пока не будет найдена та оптимальная величина проходного сечения дроссельной щели пропорционального распределителя 13, при которой виброгаситель 2 обеспечит достаточно эффективное гашение колебаний скорости гидродвигателя 1 и сигнал датчика 33 станет меньше сигнала задатчика 35„ В этом случае последующая подача дискретных уставок напряжения на суммирующий усилитель 37 с блока 36 прекращается, а виброгаситель 2 работает при настроенных указанным образом параметрах.
Если оптимальное соотношение параметров гидросистемы и виброгасиуеля 2 опять исчезнет, процесс настройки проходного сечения дроссельной щели пропорционального распределителя 13 начнется с последнего настроенного положения и будет продолжаться до тех пор, пока необходимые параметры виброгасителя 2 не будут найдены и настроены,
Таким образом, гидросистема с автоматическим поиском и настройкой оптимальных параметров виброгасителя, обеспечивая безвибрационную работу
гидрофицированного металлорежущего станка во всем рабочем диапазоне изменения условий эксплуатации последнего, позволяет значительно повысить качество обработки, производитель- .ность и надежность оборудования с,
Формула изобретения
Гидросистема металлорежущего станка с внброгасителем, содержащая гидродвигатель привода рабочего органа с полостями подачи и возврата, связанными гидролиниями через реверсивный распределитель с источником давления и сливом, регулируемое дросселирующее устройство, гидропневмоаккумулятор и электроуправляемый распределитель, причем виброгаситель выполнен в виде упомянутого гидропневмоаккумулятора, гидравлическая полость которого подключена к полости
0
5
0
возврата гидродвигателя через упомянутое дросселирующее устройство, отличающая ся тем, что, с целью улучщения динамических свойств системы путем расширения частотного диапазона работы виброгасителя, электроуправляемый распределитель выполнен пропорциональным и установлен в качестве дросселирующего устройства и снабжен системой регулирования частотного диапазона, включающей последовательно соединенные датчик колебания скорости гидро- двирателя, сравнивающее устройство с задатчиком ограничения уровня колебания скорости гидродвигателя, блок дискретных уставок напряжения и суммирующий усилитель с задатчиком постоянного уровня сигнала, причем выход суммирующего усилителя подключен к элементам управления пропорционального распределителя.
SNA
| Свешников В.К,, Усов А.А | |||
| Станочные гидроприводы | |||
| Справочник М.: Машиностроение, 1982, с | |||
| Устройство для биологического очищения сточных вод | 1924 |
|
SU419A1 |
| Прибор для промывания газов | 1922 |
|
SU20A1 |
