i (Л
п
ел
00
о
сл
ров упругого элемента и коэффициента Пуассона материала, а плоскость соединения силовводящей оболочки 9 с сило- преобразователем 3 смещена относительно нейтральной плоскости упругого элемента 2 на величину, определяемую математической формулой с учетом параметров предыдущей формулы и радиуса профиля вершины круговой призмы 12.
2 ил.
| название | год | авторы | номер документа |
|---|---|---|---|
| ТЕНЗОРЕЗИСТОРНЫЙ ДАТЧИК СИЛЫ | 2013 |
|
RU2533536C1 |
| ДАТЧИК СИЛЫ | 1992 |
|
RU2069326C1 |
| Тензорезисторный датчик силы | 1986 |
|
SU1383116A2 |
| УСТРОЙСТВО ДЛЯ ВЗВЕШИВАНИЯ ГРУЗОВ НА КРАНАХ | 1992 |
|
RU2069320C1 |
| Тензорезисторный датчик силы | 1983 |
|
SU1139980A1 |
| Тензорезисторный датчик силы | 1989 |
|
SU1631319A1 |
| Тензорезисторный датчик силы | 1984 |
|
SU1210073A1 |
| Силоизмерительное устройство | 1989 |
|
SU1723467A1 |
| Тензорезисторный датчик силы | 1986 |
|
SU1418583A1 |
| Тензорезисторный датчик силы | 1990 |
|
SU1756777A1 |
Изобретение относится к силоизмерительной технике и позволяет повысить точность датчика. При этом устраняются гистерезис и нелинейность, появляющиеся вследствие несогласованности деформаций упругого элемента 2 и вершины круговой призмы 12. Для этого плоскость опорного бурта 4 смещена относительно нейтральной плоскости упругого элемента 2 на величину, определяемую математической формулой с учетом геометрических параметров упругого элемента и коэффициента Пуанссона материала, а плоскость соединения силовводящей оболочки 9 с силопреобразователем 3 смещена относительно нейтральной плоскости упругого элемента 2 на величину, определяемую математической формулой с учетом параметров предыдущей формулы и радиуса профиля вершины круговой призмы 12. 2 ил.
Изобретение относится к измерительной технике и предназначено для измерения усилий.
Цель изобретения - повышение точ- нести.
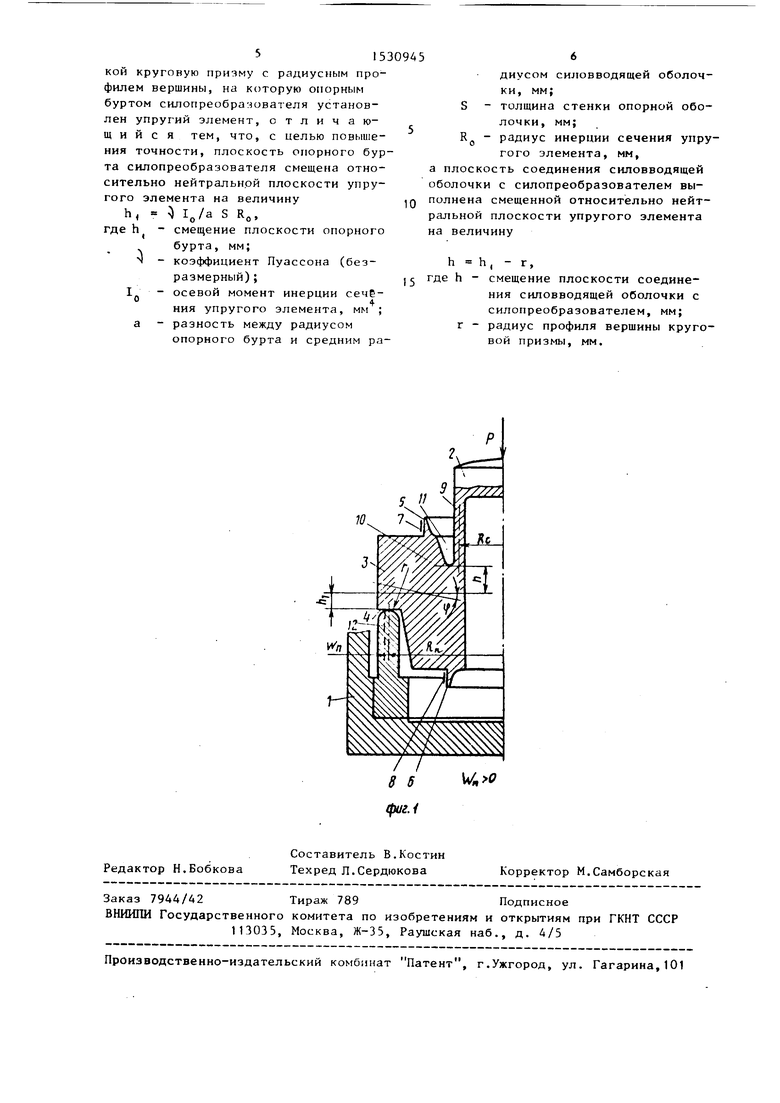
На фиг.1 показана схема датчика для измерения силы сжатия, левая половина сечения по плоскости симметрии; на фиг.2 - схема датчика для измере- ния силы растяжения, правая половина сечения по плоскости симметрии.
Датчик состоит из корпуса 1, в котором размещен осимметричный упругий элемент 2, состоящий из кольцевого силопреобразователя 3 с опорным буртом А по его наружному диаметру, под- резисторных колец 5 и 6 с расположенными на них тензорезисторами 7 и 8 и силовводящей оболочки 9, плоскость Ю соединения которой с силопреобразова- телем 3 совмещена с плоскостью основания кольцевого канала 1I между силовводящей оболочкой 9 и смежным под- резисторным кольцом 5. Упругий эле- мент 2 опорным буртом 4 силопреобра- зователя 3 опирается rfa круговую призму 12, верщина которой имеет радиус окружности R и радиус профиля г.
Датчик работает следующим образом
Под действием измеряемого усилия Р сечение упругого элемента поворачивается на угол (| , а вершина призмы получает радиальное перемещение W. Для устранения гис ерезиса датчика из-за взаимного скольжения упругого элемента и вершины призмы опорный бурт 4 смещен относительно нейтральной плоскости упругого элемента на расстояние h, . На фиг. и 2 значение h положительно в обоих случаях, поэтому смещение выполнено в направлении измеряемого усилия.
При повороте сечения упругого элемента, из-за перекатывания бурта 4 по вершине призмы, изменяется радиус опорной реакции R, а из-за упругой деформации изменяется радиус R(, рас
пределенной измеряемой нагрузки. Для устранения возникающей при этом нелинейности датчика плоскость 10 смещена относительно нейтральной плоскости упругого элемента на расстояние h. На фиг.1 h принято отрицательным, поэтому смещение выполнено против направления измеряемого усилия. На фиг.2 h принято положительным, поэтому смещение выполнено в направлении измеряемого усилия.
При этом расстояние С, от торца силопреобразователя 3 до нейтральной плоскости определяется соотношением
5 о 0
5 п
( dF.z f dF 0 J r j r
5
FF
где F - площадь сечения силопреобразователя ;
dF,z,r - соответственно элементарная площадка сечения, ее координаты относительно торца силопреобразователя и продольной оси упругого элемента. Указанные соотнощения размеров и деформаций упругого элемента обеспечивают оптимальное с точки зрения погрешности от гистерезиса и нелинейности взаимодействие деформирующихся деталей - опорного бурта 4 и круговой призмы 12, что повыщает точность датчика.
Формула изобретения
Тензорезисторный датчик силы-, содержащий корпус, осесимметричный упругий элемент, состоящий из кольцевого силопреобразователя с опорным буртом по его наружному диаметру, подрезисторных колец с расположенными на них тензорезисторами и силовводящей оболочки, плоскость соединения которой с силопреобразователем совмещена с плоскостью основания кольцевого канала между силовводящей оболочкой и смежным подрезисторныМ кольцом, а также соединенную с опорной оболоч5153
кой круговую призму с радиусным профилем вершины, на которую опорным буртом силопреобрачователя установлен упругий элемент, отличающийся тем, что, с целью повышения точности, плоскость опорного бурта силопреобразователя смещена относительно нейтральной плоскости упругого элемента на величину
h
смещение плоскости опорного бурта, мм;
коэффициент Пуассона (безразмерный);
где h - а
осевой момент инерции сечб4-КИЯ упругого элемента, мм ;
разность между радиусом опорного бурта и средним радиусом силовводящей оболочки, мм;
S - толщина стенки опорной оболочки, мм;
Rg - радиус инерции сечения упругого элемента, мм,
а плоскость соединения силовводящей оболочки с силопреобразователем выполнена смещенной относительно нейтральной плоскости упругого элемента на величину
h h, - г,
где h - смещение плоскости соединения силовводящей оболочки с силопреобразователем, мм; г - радиус профиля верщины круговой призмы, мм.
| Бояршинов С.В | |||
| Основы строительной механики | |||
| - М.: Машиностроение, 1973, с | |||
| Очаг для массовой варки пищи, выпечки хлеба и кипячения воды | 1921 |
|
SU4A1 |
| 1971 |
|
SU412400A1 | |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
