(Л
ел
оо
со
о
00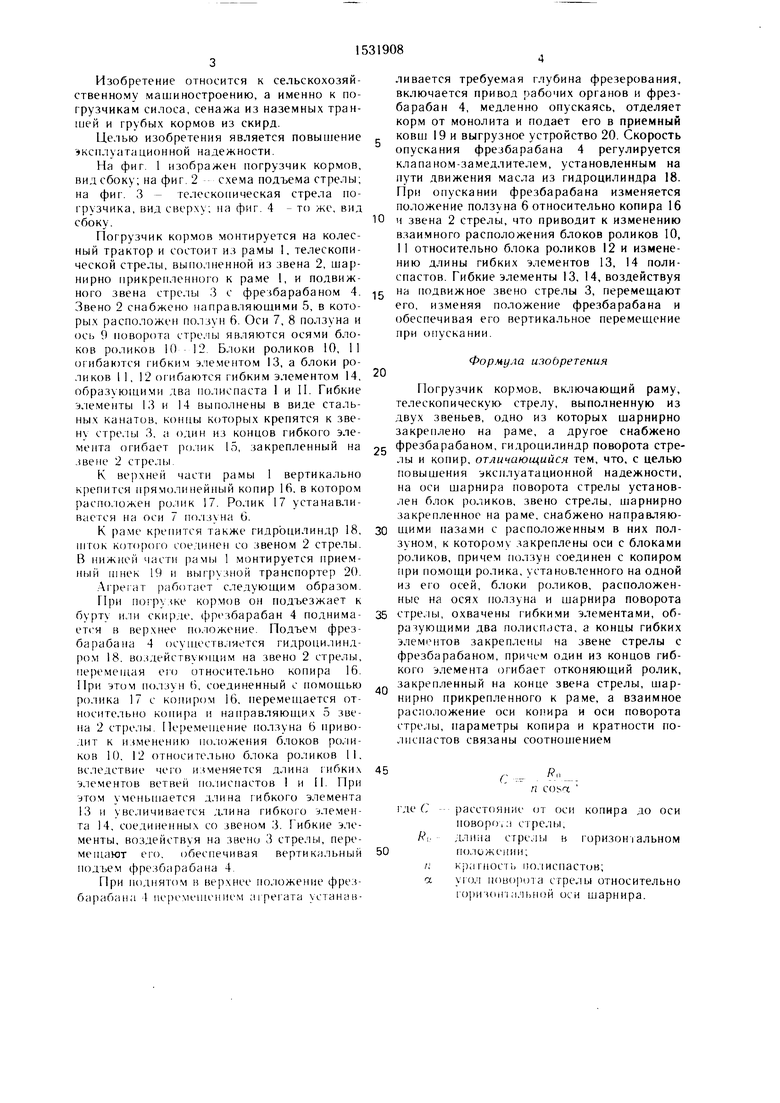
| название | год | авторы | номер документа |
|---|---|---|---|
| ПИТАТЕЛЬ К ПОГРУЗЧИКУ СЕНАЖА НЕПРЕРЫВНОГО ДЕЙСТВИЯ | 2009 |
|
RU2405302C1 |
| Погрузчик кормов | 1982 |
|
SU1020058A1 |
| Выгрузчик кормов | 1977 |
|
SU818544A1 |
| Погрузчик сенажа | 1981 |
|
SU1005715A1 |
| Погрузчик кормов | 1991 |
|
SU1806536A1 |
| АГРЕГАТ ПОГРУЗОЧНЫЙ МНОГОФУНКЦИОНАЛЬНЫЙ | 2008 |
|
RU2363139C1 |
| Погрузчик кормов | 1987 |
|
SU1419585A1 |
| ИЗМЕЛЬЧИТЕЛЬ-РАЗДАТЧИК ПРЕССОВАННЫХ КОРМОВ | 2010 |
|
RU2444184C1 |
| Агрегат для обработки почвы в садах | 1979 |
|
SU858593A1 |
| Одноковшовый автоматический погрузчик полужидкой массы | 1986 |
|
SU1337345A1 |
Изобретение относится к сельскохозяйственному машиностроению, в частности к погрузчикам кормов. Целью изобретения является повышение его эксплуатационной надежности. Погрузчик состоит из рамы 1, телескопической стрелы, выполненной из двух звеньев 2 и 3, первое из которых шарнирно закреплено на раме, второе оснащено фрез-барабаном 4 гидроцилиндра поворота стрелы, копира 16, гибкого элемента, ползуна 6, расположенного в пазах 5 звена 2 стрелы, блоков роликов 10, 11, 12. При подъеме или опускании стрелы за счет перемещения ползуна 6, взаимодействующего с копиром 16, образованные блоками роликов 10, 11, 12 и гибкими элементами полиспасты перемещают звено 3 стрелы таким образом, что обеспечивается вертикальное перемещение фрез-барабана 4. 4 ил.
w /X/ //А /// /// 777 777
19 20 I
Фаг. 7
Изобретение относится к сельскохозяйственному машиностроению, а именно к погрузчикам силоса, сенажа из наземных тран- 1ией и грубых кормов из скирд.
Целью изобретения является повышение эксплуатационной надежности.
На фиг. 1 изображен погрузчик кормов, вид сбоку; на фиг. 2 схема подъема стрелы; на фиг. 3 - телескопическая стрела погрузчика, вид сверху; па фиг. 4 - то же, вид сбоку.
Погрузчик кормов монтируется на колесный трактор и состоит из рамы I, телескопической стрелы, выполненной из звена 2, шар- нирно прикрепленного к раме 1, и подвижного звена стрелы 3 с фрезбарабаном 4. Звено 2 снабжено направляющими 5, в кото- ры.х расположен ползун 6. Оси 7, 8 ползуна и ось 9 поворота стрелы являются осями блоков роликов К) 12 Блоки роликов 10, 11 огибаются гибким .ментом 13, а блоки роликов 11,12 огибаются гибким элементом 14, образуюп1ими два полиспаста I и II. Гибкие элементы 13 и 14 выполнены в виде стальных канатов, концы которых крепятся к звену стре.1ы 3, а один из концов гибкого элемента огибает К),- 15, закрепленный на звене 2 стрель г
К верхней части рамы 1 вертикально крепится прямолинейный копир 16. в котором расположен ролик 17. Ролик 17 устанавливается на оси 7 по. кпна 6.
К раме крепится также гидроцилиндр 18, iHToK KoTopoi o сое.чинен со звеном 2 стрелы. В нижней части рамы 1 монтируется приемный 1пнек 19 и выгрузной транспортер 20.
.Xi peiiiT работает следующим образом.
При погру.(ке кормов он подъезжает к бурту или скирде, ({)резбарабан 4 поднимается в верхнее положение. Подъем фрез- барабана 4 осуществляется гидроцилиндром 18. воздействующим на звено 2 стрелы, перемеп1ая его относительно копира 16. При этом ползун ti, соединенный с помощью ролика 17 с копиром 16, перемещается относительно копира и направляющих 5 звена 2 стрелы. Перемещение ползуна 6 приводит к изменению положения блоков po. ni- ков И), 12 относительно блока роликов II, вследствие чего изменяется длина гибких элементов ветвей полиспастов 1 и II. При этом уменыпается длина гибкого элемента 13 и уве;1ичивается длина гибкого элемен-
та 14, соединенных со звеном ,3. Гибкие элементы, воздействуя на звено 3 стрелы, пере- метают его, обеспечивая вертикальный подъем фрезбарабана 4.
При поднятом и верхнее положение фрезбарабана 4 11е)емепкч|ием arpei aTa устанав
ливается требуемая глубина фрезерования, включается привод рабочих органов и фрез- барабаи 4, медленно опускаясь, отделяет корм от монолита и подает его в приемный ковщ 19 и выгрузное устройство 20. Скорость опускания фрезбарабана 4 регулируется клапаном-замедлителем, установленным на пути движения масла из гидроцилиндра 18. При опускании фрезбарабана изменяется положение ползуна 6 относительно копира 16 и звена 2 стрелы, что приводит к изменению взаимного расположения блоков роликов 10, 11 относительно блока роликов 12 и изменению длины гибких элементов 13, 14 полиспастов. Гибкие элементы 13, 14, воздействуя на подвижное звено стрелы 3, перемещают его, изменяя положение фрезбарабана и обеспечивая его вертикальное перемещение при опускании.
Формула изобретения
где С.
Погрузчик кормов, включающий раму, телескопическую- стрелу, выполненную из двух звеньев, одно из которых щарнирно закреплено на раме, а другое снабжено фрезбарабаном, гидроцилиндр поворота стрелы и копир, отличающийся тем, что, с целью повышения эксплуатационной надежности, на оси шарнира поворота стрелы установлен блок роликов, звено стрелы, шарнирно закрепленное на раме, снабжено направляющими пазами с расположенным в них ползуном, к которому закреплены оси с блоками роликов, причем ползун соединен с копиром при помощи ролика, установленного на одной из его осей, блоки роликов, расположенные на осях ползуна и шарнира поворота стрелы, охвачены гибкими элементами, образующими два полиспаста, а концы гибких элементов закреплены на звене стрелы с фрезбарабаном, причем один из концов гибкого элемента огибает отконяющий ролик, закрепленный на конце звена стрелы, шарнирно прикрепленного к раме, а взаимное расположение оси копира и оси поворота стре..1ы, параметры копира и кратности полиспастов связаны соотношением
п cosa
расстояние (п оси
поворо, :i стрелЬ),
длина стрелы в
положении;
к{)а гность ио.чиспастов;
укхч поворота стрелы относительно
rojuruiin ;|. 11)П(й оси щарнира.
копира до оси горизонтальном
15
Физ./
| Выгрузчик кормов | 1977 |
|
SU818544A1 |
| кл | |||
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
