р - угол между осью стрелы и горизонтальной плоскостью; С - расстояние по горизонтали между осью вращения стрелы и осью симметрии копира.
Благодаря этому фрезбарабан перемещается в плоскости, перпендикулярной к горизонту, и производит отделение слоя корма с минимальной вновь образуемой поверхностью среза.
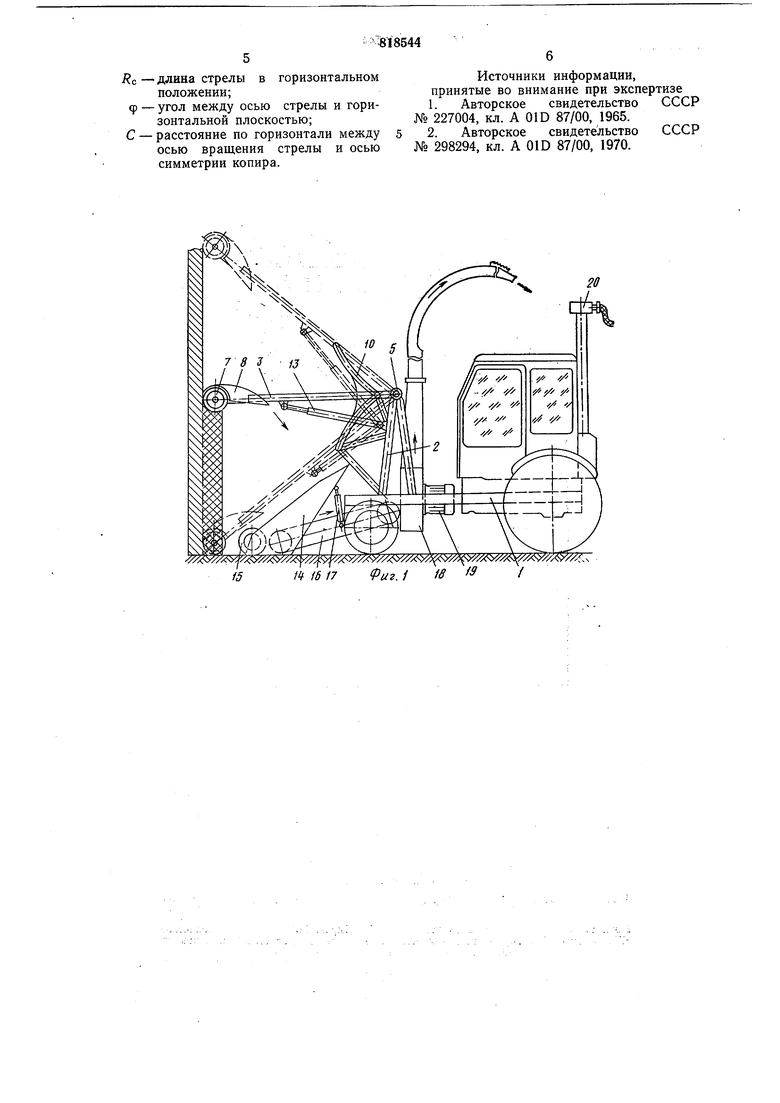
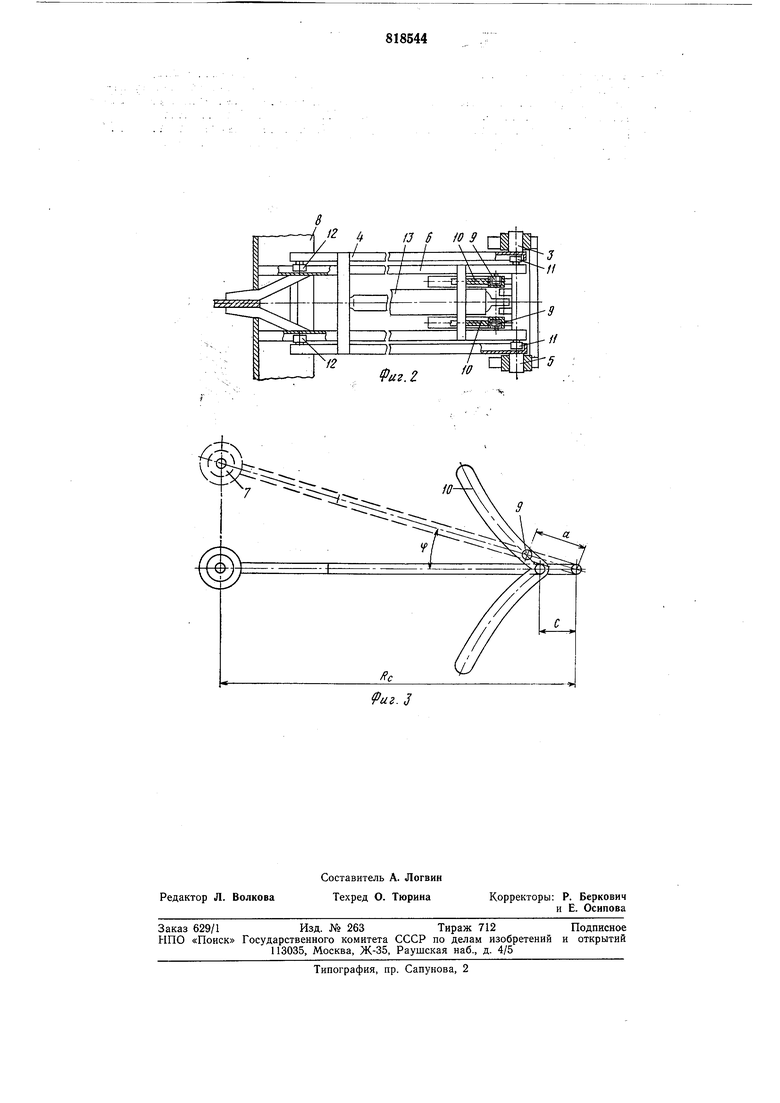
На фиг. 1 показан выгрузчик, общий вид; на фиг. 2 - разрез стрелы и схема ее крепления; на фиг. 3 - форма направляющего паза копира.
На раме 1 самоходной тележки смонтирована опора 2 стрелы 3, которая состоит из телескопически соединенных рамок: внещней 4, шарнирно закрепленной в подщипниках 5 опоры 2, и внутренней 6, расположенной в одной плоскости с внешней рамкой 4. На одном конце рамки 6 закреплен фрезбарабан 7 с направляющим кожухом 8, а на другом закреплены цапфы с роликами 9, входящими в фигурные пазы копира 10, который жестко закреплен на опоре 2. Внутренняя направляющая поверхность фигурного паза копира 10 изогнута по кривой, определяемой соотношением
A , V cos срУ
где А - точка внутренней поверхности фигурного паза; - длина стрелы в горизонтальном
положении;
Ф - угол между осью стрелы и горизонтальной плоскостью; С - расстояние по горизонтали между осью вращения стрелы и осью симметрии копира.
Пальцы с катками 11 жестко закреплены на рамке 6 и помещены в пазы рамки 4, а пальцы с катками 12 жестко закреплены на рамке 4 и помещены в пазы рамки 6. Внешняя рамка 4 соединена со штоком гидроцилиндра 13, шарнирно закрепленного на опоре 2. Спереди в нижней части выгрузчика расположено приемное устройство 14, состоящее из приемного шнека 15, транспортера 16 и гидроцилиндра 17. На раме 1 установлена швырялка 18 с приводом 19.
Питание электропривода рабочих органов выгрузчика выполнено от электросети хозяйства через кабельный ввод 20.
Выгрузчик кормов работает следующим образом.
При помощи самоходной тележки, на раме 1 которой смонтированы узлы выгрузчика, и с поднятой гидроцилиндром 13 на высоту бурта стрелой 3 выгрузчик устанавливается на заданную глубину фрезерования. Включается привод 19 швырялки 18, приводы транспортера 16, приемного шнека 15 и фрезбарабана 7, а затем переключается гидроцилиндр 13 на опускание стрелы 3. При этом внутренняя рамка 6 перемещается на катках И и 12 вдоль внешней рамки 4, а цапфы с роликами 9, перемещаясь по внутренней направляющей поверхности фигурного паза копира 10, ориентирует рамку 6 с закрепленным на ней фрезбарабаном 7 так, что проекция стрелы 3 на горизонтальную плоскость остается постоянной и равной Re при любом угле ф. В результате фрезбарабан 7 перемещается в плоскости, перпендикулярной к горизонту, и, вращаясь, срезает от монолита вертикальный слой корма, оставляя при этом минимальную открытую поверхность среза, контактирующую с воздухом.
Срезанный корм отбрасывается по направляющему кожуху 8 в приемное устройство 14, откуда приемным шнеком 15 и транспортером 16 подается в швырялку 18 для погрузки в транспортное средство.
Для перестановки выгрузчика на новое место выемки приемное устройство 14 поднимается гидроцилиндром 17 в транспортное положение и стопорится.
Предлагаемый выгрузчик кормов дает возможность уменьшить потери корма от вторичной ферментации и обрушения верхних слоев путем сокращения вновь образуемой фрезбарабаном поверхности среза и исключения образования козырька бурта. Кроме того, повышается жесткость крепления фрезбарабана и уменьшается неравномерность нагрузки по высоте бурта. Это облегчает условия автоматизации процесса отделения корма и повышение производительности выгрузчика.
Формула изобретения
Выгрузчик кормов, включающий стрелу, выполненную в виде двух звеньев, одно из которых шарнирно закреплено на раме, а другое снабжено фрезбарабаном, и гидроцилиндр поворота стрелы, отличающийся тем, что, с целью уменьшения потерь кормов при выгрузке путем перемещения фрезбарабана в плоскости, перпендикулярной к горизонту, выгрузчик снабжен закрепленным на раме копиром с фигурным пазом, а звенья стрелы выполнены в виде телескопически соединенных рамок, причем внещняя рамка соединена со штоком гидроцилиндра, а внутренняя рамка имеет ролики, размешенные в фигурном пазе, внутренняя направляющая поверхность которого изогнута по кривой, определяемой соотношением
,f-Jl +C,
V cos 9У
где А - точка внутренней поверхности фигурного паза; Re - Ф - С - 56 длина стрелы в горизонтальномИсточники информации, положении;принятые во внимание при экспертизе угол между осью стрелы и гори-1. Авторское свидетельство СССР зонтальной плоскостью;№ 227004, кл. А 01D 87/00, 1965. расстояние по горизонтали между5 2. Авторское свидетельство СССР осью вращения стрелы и осью№ 298294, кл. А 01D 87/00, 1970. симметрии копира. - 818544

| название | год | авторы | номер документа |
|---|---|---|---|
| ПИТАТЕЛЬ К ПОГРУЗЧИКУ СЕНАЖА НЕПРЕРЫВНОГО ДЕЙСТВИЯ | 2009 |
|
RU2405302C1 |
| АГРЕГАТ ПОГРУЗОЧНЫЙ МНОГОФУНКЦИОНАЛЬНЫЙ | 2008 |
|
RU2363139C1 |
| Выгрузчик кормов | 1989 |
|
SU1692359A1 |
| Погрузчик кормов | 1988 |
|
SU1531908A1 |
| ИЗМЕЛЬЧИТЕЛЬ-РАЗДАТЧИК ПРЕССОВАННЫХ КОРМОВ | 2010 |
|
RU2444184C1 |
| Погрузчик кормов | 1982 |
|
SU1020058A1 |
| Рабочий орган выгрузчика кормов | 1977 |
|
SU622442A1 |
| Погрузчик кормов | 1987 |
|
SU1419585A1 |
| Агрегат для приготовления силоса в траншеях | 1981 |
|
SU990132A1 |
| Погрузчик кормов | 1991 |
|
SU1806536A1 |
15/« 16 17 Фиг. 1 18 f3/
20
