27
18
14
ел
со 1чЭ
О
ю
Oi
17
Фuг.i
Изобретение стнохмпея к ,e.ur,iiiiieK()ii гехлике. а шкмИ .о к iipcu-vKiM I:;.AHM ко- neunocieii.
lU .ibH) и:4оГ)Н leiuui яи, ;яеи 1 еии/кение энергозатрат при XdjijTn- и иоиыпкмие антропоморфности IIONO.l.KH .
1 la фш 1 и ii;О а/KCiia нгкуеетнениая е она, iipo.io.ihHoe er.K4;,U ; lia фи| . 1. еече ние . Л на (jui; . I ; iia фш , i l ееченне 1 Ь И, (jiltl . 1 .
11ск -Ч гвениач егона i и., (.та. п,- ного каркаса 1 е o/inKoiiKoii нз i;iai - гячного нолнурстан;; 1Ьион 1ая -laeTi, ii кар- каеа 1 iniei i isMj. i ь ; ь.он. M)S iiiio, ерелпяя iibiiio. IiieiM и I .ii.n Мскм нны 4 и;; iipy/KHHiioH ei а. Ill Ь 1 подвешен к iiiapc- Rui i го ювке Г) I о. нмич ;о|ни)го iiia| iiii pa Ь. евязанно ео inr..io i 7 нск-ре/ ; i вом че- тыре зиенн()1Ч) шаршпию ii,i4a/i iioi о .- пнчма )S, вк.помакнне о /кеетк1г( ereii/KHii, крнвошин 9 н нкплн 10. iipyiHi- iNieia.i .к резиновые) Н1арннры И . н нружинх 14. iUy/iKa 15 )a II /1 еегко (акрен- uMia на ||ягочно11 чает ка|1каеа 1, а п1.1ка И) 1нарннра . |iaeio4Ke HO.I- 17, uaMMo.ieiieriiyKHHtM о с iiiioii 14 н на11рав. 1ЯК)ним1 1. закр1Ч. К ниой на inai. - гнне 4 каркаеа 1 в ноео пюн его чаетн I не ноказана). В iijioiu eee еборкн eroiu i
14
1)Ы
11 1:5, образующие рекчнерагор -Jiiepiiiii, ye i анан.шиают е нрелиар11те,1ьным натягом, обеецечш аюшнм iipii, ieraiiHe шаронон 1о,1оики 5 iunK(), ioi кн 7 к нрокеимальному еферичеекому ноднятнику 19.
Дне гал1)1Н)П1 ei| epH4eeKnii ноднятннк 20 елужит для опоры Н1аров(й олонки 5 в опорную лннження. еоме: рпчеекие центры О, О ефернчеекнх нодпягннков 10, Ji i раеположены по обе е юроны лнини центров Н1а|1ннров 11, Ь 1, 111ар1:Нр||(;-рыча/1 11Ы11 механизм 8 обладае двумя но,юукеннямн ет(л 1чпвого равишич ня, а именно н но.ю- жениях ucHT)a liiapoisoii i4),-ioBKii Г), определяемых коорднпатамн iieirrpoB (), О чеекпх нодпягннков 19 н 20 еоогвететвенно
(гопа. так/ке енабжена у н)ав, 1ЯЮ1Днм диучлечнм плчагом 21, е ган ч-ь имшым на прмом H|HMB;ip;i 1елMio н нре 22, 11 мм . 1,1 ji емы м
Концы K|)HiieiiiiHHa О i; та : рамп 12 еоедннены е поперечной I o. ieiioe oiMioi о 1н;,рн ; ра Г .
( /гона р::бо i г. le i г.ннмм
1) фл И :i , i)e;ioea б iai ;да| 1Я ен, I уп гос 1 II 11р л ГД) 1 4 и 1 1аарп11р|;о-рыч;./л Д:,;;1 мглани -. конфнг раци1о, нока «а iHiyio ria нее eToii4HBoe нололчсчни iia иноглч-и я I, нле-1нн | pi) еио,-,: д.кд ал i.ri.iM )нпoм ч |1рижа1 к нод ммИ , 2(| каркаеа 1 н ани- ма.ет иеходиос ч .лмчше Ь ,ae,ii H eoiij). i-|lili:.C:i llnlKH 27 e lil./ , rMloplldii 11(1
fepXHue 3 pr-л п,:, : .4Mb iiih pe;ii lЛlи
М|Л|,;,1 0,1ellH J 4 ,i uilOplilH; (4 Tl
liJHii ni Hiap- ii ipo l 2) I a HI 11 lap HII- o,) 2
0
0
5
0
Д1) начинает нзменягьея KOHi)Hry|5ai; ая наринрпо-рычажного механизма 8 за ечет допо, нн re. ibiioro закручивания упругих niap- ниров 11 Г5 н ;1е4н)рмацни нружины 14.
11р(И еходи ягкая амс р н.ишня передне о то,|мка н накопленне энергии в рекунера- Topt Iliv . ie окончания (}ia.-ibi переднего то,тч- ка шаровая i (, 1овка , , 1откн 7 входит в контакт ео еферичеекнм 1и)днятннком 20, н |1Ычаж11ЬН1 механизм 8 .запираете;;, так как
(.1 11о,1ОЖ( yiipyioii еиетемы eroinii яв- .1яеи;я уег(. П рн этом ги,, п.-м (), 1ени 28 ео HI ико, lo i Koti 7 приобреган) епоеоб- ноеть евободно ново 1ач11ват1)ея от11оеите, |ьно lUMiipa О |)леноетопн1)го 1па|)нира 1, находя|цегое 1 1аке1 ма,-1Ы1о б,1нзко к oiKjpnoii по- iK pxHocTH, в iiaiipar,, U HHii дви/кення iiiiiia- ,1ида И ), 1ьтате оеу 1неетв,1ЯК)Тея eiioCoa- Н1, перекат с мппнма 1,нымн ипрагами эне ргин и адаптации OTonbi к н(,-р(1вноетям дороги в нан1и1Н,1ен11и дв11жел1ия,
.Л.кппация етошл в опорную фазу .твиж ния при черовноегях onopiioi i нопе1 хн(ч i п li поне 1ечно 1 напра в.1епии pea. 1И ( егея за, ече 1 нчиорота гнль. дл го,1с-ни 28 отпо eiire.ibiio ii(4iTpa i o, ieiioeTOiiiioro Hia)HHj);i d и
5 )Том н; Л|равле пни и ма,п.1х де(})ормапи1 Л1- ругих шарниров II, 12 в рад11а,.1Ы10м на- нравленнн
11оне)ечная уетойчивосгь обеенечинаетея MoMeniaMH ен, 1 )ети в HiapiiH|)a И, 12, ве,личины ко юрьгх е д1ич твгн11() возраетают е роегом (адиаль 1ых децюрмаци и.х вту- ,10к 1Г, 29,
11акон,1(.Т1ная в |1еку||ераторе :1не()гия от- .чаек Я в ()азе заднего то,:1чка. Момент Bjje- меш вк,мочения peKyHt-pai opa sHe|iriiH lery- ,1ируегея в завиеимоетн oi индивидх а, 1ьпых оеобенноетей инва,чнда е помошьк еоот- ветс вуюшей уетановки регу,|ируемого упора но выеоте шнко, 1огки 7,
Вк,1Юче11ие рекуператора энергии иро иеходиг е.чедуюишм образом, Прн повороте
0 ги,1взы го,1ени 28 унор 23 воздейетвует на двун,1ечн11 pi.mar 21, который, новорачи- ваяеь отноеите, 1ьно оен 30 1нарни|)а 22, He|ie- iiojuri 1на|)НИ|1Но-рычаж11ьц1 механизм 8 li но- ,1оженне неуетойчнвого ()вееия. Пр(, два- риге,1Ы1о 11а)ниры 11 13 и
5 ежагая пружина 14 отдак энергию, кого- 1ая реа,-1нзуетея в виде активной |о, 1чко- Boii реакции еюны. По Mefie неремен|ення П1арнирно-рьн1ажного чехани..ма 8 в нрокен- ма, ||о,|оженнс i, | ийчив(лч1 |К1вновееия (О) о 1 К|1ывае11, я зазор: между дву11,1ечим рычагом 21 и рггу,111 pyevtiiiM упором 23, и двуп,1еч)п 1 рычаг 21 пово и1чиваетея в иеход- ное но,1ижение,
1 рименение опиеа иного мечаншма е1 онь; е )екуперагором эне(11пн в eoe iaBe нроте - за (чдт1 е ко, |енным и хани.шом, реа- , ;нзу к)ни1 м (|)ул1кцпональное укорочение протезированной конечное-|И в ()а е iit -peH(.)ea, например е четырех 1венн1лм ко,:1енным мехаиинмом, oneeiK MMiuier высокое качество xo.ii)- Г)Ы с tiKiMBiioii lo.iMKoHOH функцией н мини- ма. 11)И1)1ми .гпрагами neiirnn.
)л(1/. Ш и:1()6реп Н11.ч
1. Искусственная стопа, содержаН1ая каркас с поданной и пяточной частью, эластич- HyKj об.тицовку, r cvieHocToiiHbiii ina)Hnpc но- перечиой ()ськ) и 1пик(1игку, связанную с подпружиненным четыре.х.шепным nia)Hiip- но-рь чажнь м механизмом, ocHaiuenHijiM le- куператором и |)азмсп1е 1ным в каркасе, огличиющияс.ч тем, что, с ) снижения эиерготрат при ходьбе и повышения антропоморфности походки, в ней внчтри каркаса ycTanou. ieiibi напранляюшан с нолзупом, in - плечий рыч. ч и кинема 1ически связанные с го.ченос чонным Н1арнн|)ом днста,1ьиый и
0
5
П1)оксимальный сфе)ические подпятники, а ч е г ы ре X 3 ве н н ы и н i а р н и р но- р ы ч а ж н ы и ме а - ннзм выполнен в виде кривошипа и шатуча, одними концами соединенных соотве г ч BeiiHc с пяточной частью каркаса и ползуном а д) iHMH - с поперечной осью ro,-ienocrk(H 1101 ( шарнира, которая посредством лих цлечеш рычага кинематически со
П1.ИКОЛОТКОЙ.
2, Оспа по п, 1, отличающаяся тем, ч ю геометрические центры дистального и нрок- симал1 ного сферических подпятников рас- ||(;,к)кены но обе стороны от обшей (к и KpnB(j;HHiia и шатуна при их выпрямленном ио.юженин, а шарниры четырехзвеннсм о шарнир но-рыча ж него механизма выполнены |;р г11ми в радиальном и окружном наирав,1(41,1ЯХ.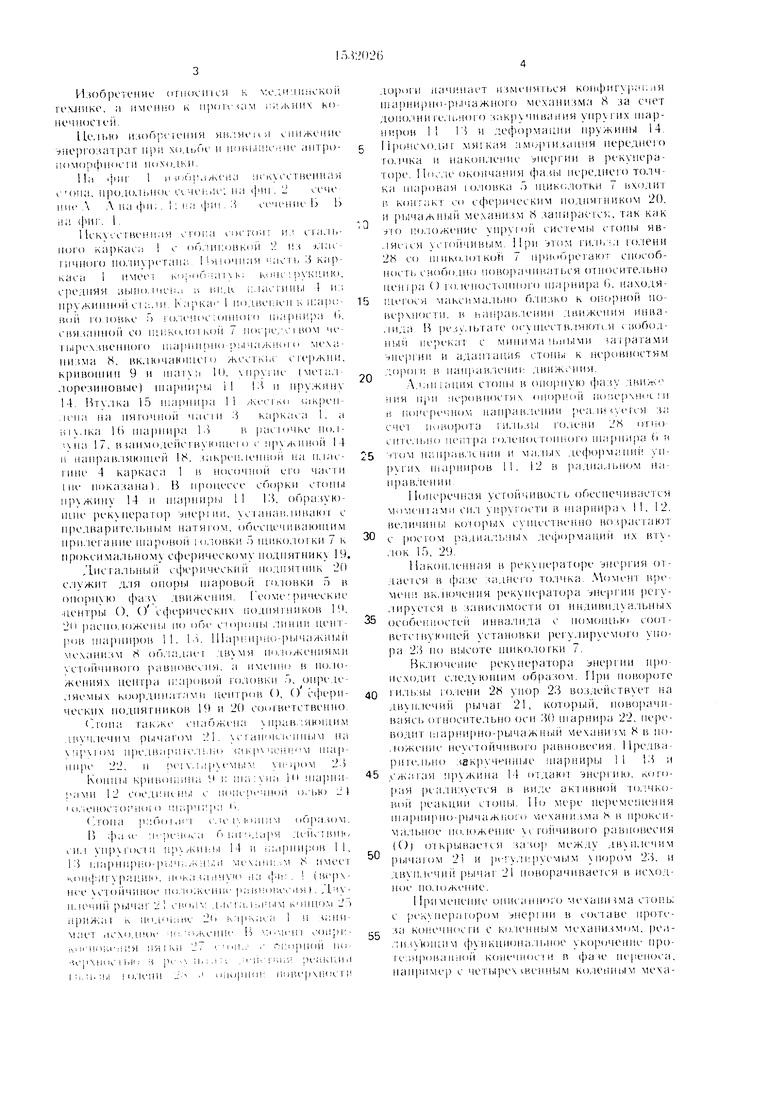

| название | год | авторы | номер документа |
|---|---|---|---|
| ГОЛЕНОСТОПНЫЙ УЗЕЛ ПРОТЕЗА | 1998 |
|
RU2132665C1 |
| ПРОТЕЗ ГОЛЕНОСТОПНОЙ ЧАСТИ НОГИ | 1999 |
|
RU2153308C1 |
| Устройство для нанесения покрытий на гибкие пластины | 1988 |
|
SU1519901A1 |
| Голеностопный узел протеза нижней конечности | 1987 |
|
SU1498490A1 |
| Установка для досушивания сена в скирдах | 1985 |
|
SU1311661A1 |
| Искусственная стопа для протезов бедра | 1988 |
|
SU1623644A1 |
| Искусственная стопа | 1976 |
|
SU738618A1 |
| ГОЛЕНОСТОПНЫЙ УЗЕЛ ПРОТЕЗА | 1993 |
|
RU2012285C1 |
| ГОЛЕНОСТОПНЫЙ УЗЕЛ ПРОТЕЗА | 2001 |
|
RU2219876C2 |
| Способ изготовления протеза | 1984 |
|
SU1277961A1 |
Искусственная стопа относится к медицинской технике, а именно к протезам нижних конечностей. Цель изобретения - снижение энергозатрат при ходьбе и повышение антропоморфности походки. Искусственная стопа содержит каркас 1, облицовку 2, щиколотку 7, голеностопный шарнир 6, четырехзвенный шарнирно-рычажный механизм в виде кривошипа 9 и шатуна 10 с ползуном 17, соединенных упругими шарнирами 11 и 13 с каркасом 1, а упругими шарнирами - с поперечной осью 24 голеностопного шарнира 6, кинематически связанного с дистальным 20 и проксимальным 19 сферическими подпятниками. Кроме того, стопа снабжена двуплечим рычагом 21, кинематически связывающим поперечную ось голеностопного шарнира 6 со щиколоткой 7 и гильзой голени 28. Геометрические центры дистального и проксимального 19 сферических подпятников расположены по обе стороны относительно общей геометрической оси кривошипа 9 и шатуна 10 при их выпрямленном положении. Шарниры 11, 12, 13 выполнены упругими в радиальном и окружном направлениях и вместе с пружиной 14 образуют рекуператор. 3 ил.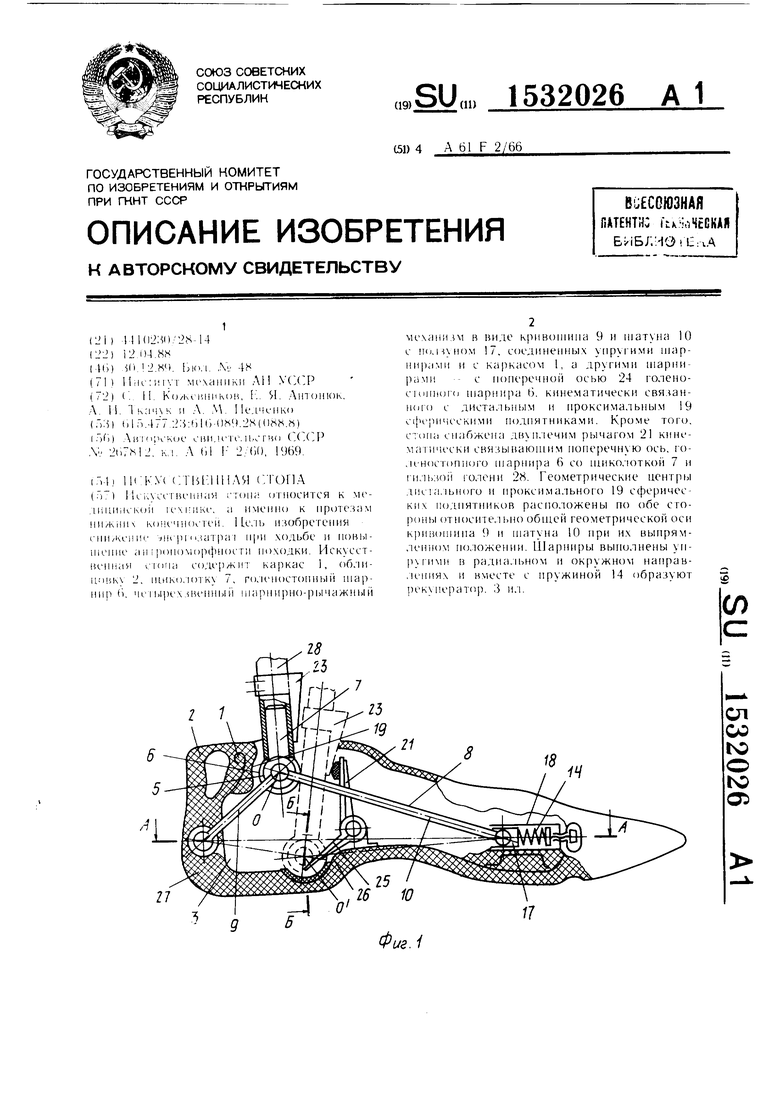
24
15
20
Фиг.
