Изобретение относится к области авиастроения и приборостроения и может быть использовано при управлении газотурбинными двигателями, у которых управляюших воздействий меньше числа управляемых координат.
Целью изобретения является повышение быстродействия.
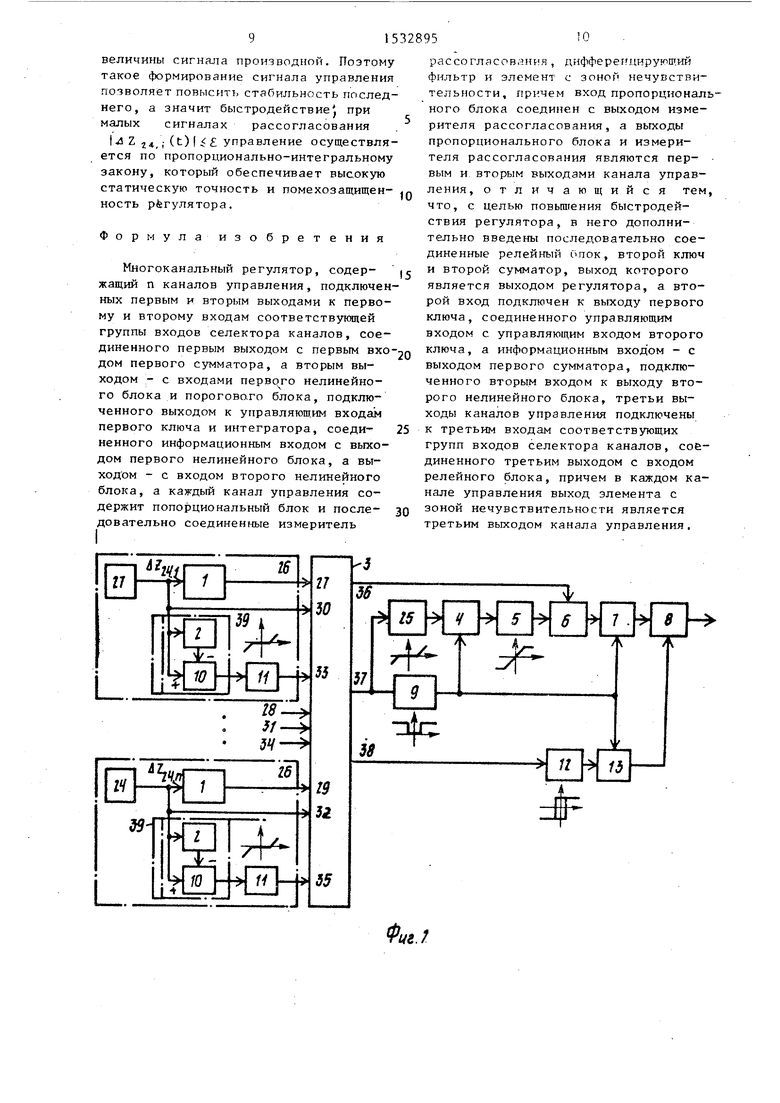
На фиг. 1 представлена функциональная схема регулятора, на фиг.2- функциональная схема пропорционалъного блока, на фиг. 3 - функциональная схема селектора.
Схема содержит пропорциональный блок 1, элемент 2 задержки, селектор 3, интегратор 4, второй нелинейный блок 5, первый сумматор 6, первый клгс-i 7, второй сумматор 8, пороговый блок 9, элемент 10 сравнения, элемент 1 с зоной нечувствительности релейный блок 12, второй ключ 13, фильтр 14 высоких част т„двухтактный
детектор 15, фильтр 16 низких частот, Пороговый элемент 17, усилитель 18, ключевой элемент 19, элементы 20- 2 сравнения, дешифратор 23, измеритель 24 рассогласования, первый не- #инейный блок 25, канал 26 управления, первый входы 27-29, вторые входы 30-32 и третьи входы 33-35 в группах уходов селектора 3, первый-третий выходы 36-38 селектора 3, дифференцирующий фильтр 39.
Каждый пропорциональны блок 1 см.фиг.2) содержит последовательно соединенные фильтр 14 высоких частот двухтактный детектор 15, фильтр 16 изких частот, пороговый элемент 17, причем вход фильтра 14 высоких частот соединен с информационным входом усилителя 18 и является входом пропорционального блока 1, выход поро- :-ового элемента 17 соединен с управляющим входом усилителя 18, выход которого является выходом пропорционального блока 1.
Пропорциональный блок 1 Каждого |.-го канала 26 управления формирует (выходной сигнал вида
ii 1
И, т
(О
де К,.. - переменный коэффициент усиления усилителя 18 1-го канала 26 управления Д274; - входной сигнал рассогласования 1-го канала 26 управления.
Фильтр 16 высоких частот служит Для выделения из сигнала рассогласования 4Z 1-го канала 26 управления высокочастотной помехи Ц);, максимальная частота в спектре которой больше максимальной частоты в спектре полезного сигнала.
Двухтактный детектор 15 и фильтр 16 низких частот служат для выделеу. сигнала по
ния Среднего значения мехи.
Пороговый элемент 17 служит для формирования логического сигнала, синализирующего о првышении помехой предельно допустимого уровня. Если V- 7 и ( и заданный порог срабатывания), то на выходе порогового элемента 17 формируется сигнал 1, в противном случае Оь.
Усилитель 18 имеет коэффициент усиления К „, К П), если на его управляющий БХОД поступает , и коэффициент усиления К „, Кп , если на
0
5
0
5
0
45
,..
его управляющий вход поступае О. Причем К п К п . Таким образом, пропорциональный блок 1 обеспечивает регулирование с большим коэффициентом усиления К низком уровне помех и с меньшим коэффициентом усиления К1 при высоком уровне помех.
На функциональной схеме селектора З(см.фиг.З) для определенности число п каналов 26 управления равно 3.
Селектор содрежит ключевые элементы 19, элементы 20-22 сравнения и дешифратор 23. При этом первые входы всех групп входов 27-29 селектора 3 через соответствующие ключевые элементы 19 подсоединены к первому выходу 36 селектора 3, вторые входы 30-32 селектора 3 через соответствующие ключевые элементы 19 подсоединены к второму выходу 37 селектора 3, третьи входы 33-35 селектора 3 через соответствующие ключевые элементы 19 подсоединены к третьему выходу 38 селектора 3. Кроме того, вторые входы 30-32 селектора 3 подключены к соответствующим входам элементов 20-22 сравнения выходы которых подсоединены соответственно к первому-третьему входам дешифратора 23. Первый-третий выходы дешифратора 23 подсоединены к управляющим входам ключевых элементов 19. Ключевые элементы 19 открыты при подаче на их управляющие входы сигналов 1 и закрыты - при подаче О,
Элементы 20-22 сравнения служат для формирования на своих выходах сигналов |:1, если величины сигналов на их первых входах больше Чалгебра- ически), чем на вторых, и сигнала О в противном случае.
Дешифратор 23 предназначен для формирования сигнала 1 на одном из своих выходов в зависимости от комбинации логических сигналов на его входах.
Работа дешифратора 23 полностью определяется таблицей соответствий логических сигналов на его входах и выходах.
Значения логических сигналов на входах дешифратора 23
Значения логических сигналов на выходах дешифратора 23
15328956
равляющие входы сигнала ), а при подачае на их управляющие входы сигнала О первый ключ 7 открыт, я вто - рой ключ 13 закрыт .
Регулятор работает следующим образом.

| название | год | авторы | номер документа |
|---|---|---|---|
| Многоканальный регулятор | 1983 |
|
SU1161915A1 |
| Устройство автоматического согласования и контроля режимов многоступенчатых насосных и гидротранспортных установок | 1982 |
|
SU1079568A1 |
| Устройство для управления однофазным автономным инвертором | 1987 |
|
SU1615845A1 |
| Импульсный регулятор | 1984 |
|
SU1170426A1 |
| Устройство для контроля релейных регуляторов | 1981 |
|
SU962865A1 |
| Регулятор относительного обжатия прокатываемой полосы | 1981 |
|
SU944696A1 |
| Система автоматического управления периодическим процессом ферментации | 1983 |
|
SU1102813A1 |
| Регулятор напряжения для силовых трансформаторов | 1982 |
|
SU1140094A1 |
| Импульсный регулятор | 1984 |
|
SU1238025A1 |
| Электропривод с подчиненным регулированием параметров | 1983 |
|
SU1108593A2 |

Изобретение относится к области авиастроения и приборостроения и может быть использовано при управлении газотурбинными двигателями, в которых управляющих воздействий меньше, чем управляемых координат. Целью изобретения является повышение быстродействия. Поставленная цель достигается за счет того, что в каждом канале регулирования определяют сигнал рассогласования между текущим и заданным значениями контролируемых параметров. Преобразуют полученные сигналы рассогласования по пропорционально-дифференциальному закону. Сигналы рассогласования всех каналов регулирования анализируются по величине и в процессе регулирования в каждый момент времени используются только сигналы канала регулирования с максимальным (или минимальным) сигналом рассогласования. Затем анализируется величина сигнала рассогласования выбранного канала регулирования. Если эта величина больше некоторого порогового значения, то формируется управляющий сигнал, пропорциональный знаку производной сигнала рассогласования, а если меньше порогового значения, то сигнал рассогласования дополнительно интегрируют, полученный результат суммируют с пропорциональным сигналом и суммарный сигнал используют в качестве управляющего сигнала. 3 ил.
Х - невозможная комбинация.
Сигнал 1 с одного и выходов дешифратора 23 поступает на управляющие входы соответствующих ключевых элементов 19 и подключает к первому 36, второму 37 и третьему 38 выходам селектора 3 соответствующие выхрды того канала 26 управления, в котором сигнал рассогласования иZ минимальный, т.е. осуществляется селекция по минимуму.
Интегратор 4 формирует интегральную составляющую закона управления
Y4 - K,(t)dt r (2)
о
где Уг5- выходной сигнал второго нелинейного блока 25i К 4 - коэффициент передачи интегратора 4.
Первый ключ 7 закрыт, а второй ключ J 3 открыт при подаче на их упv,(t
dZ14.(t) - dZ14,; (t-aC), если |dZM . (t)- uZ(t-u)ff
о,
если |4Z14i(t)- & (t- лС)
где сГ - величина зоны нечувствительности элемента 11 с зоной нечувствительности. Выходной сигнал Y,;пропорционального блока 1, выходной сигнал 4Z14(t) измерителя 24 рассогласования и выходной сигнал X11t;(t) элемента II с зоной нечувствительности 1-го канала 26 управления, в котором сигнал с рассогласования 4Z14;(t) минимален по абсолютной величине, поступает на первый 36, второй 37 и третий 38 выход селектора 3, на которых формируются сигналы
e,(t) ) , (4) e(t) min dZ14 . (t); (5) es(t) X11i;(t) - (6)
Сигналы рассогласования 4Z2f.(t) с выходов измерителен 24 рассогласования поступают на вторые входы 30- 32 селектора 3, который осуществляет выбор того канала 26 управления, в котором рассогласование и 7 наибольшее в случае применения селектора 3 максимальных значений или наименьшее в случае применения селектора 3 минимальных значений. В дальнейшем для определенности будем рассматривать работу регулятора в случае селектора 3, осуществляющего выбор канала 26 управления по минимальному знаг- чению сигнала рассогласования & Z t(t)
На выходе элемента 10 сравнения формируется разностный сигнал 4Z24f,(t) -4Z44(t-af), где довременное запаздывание, вносимое элементом 2 задержки. Элемент 11 с зоной
нечувствительности пропускает на свой выход разностный сигнат, вычисляемый элементом 10 сравнения при превышении этим сигналом зоны нечувствительности J1 , т.е.
(3)
Рассмотрим работу регулятора при больших ошибках управления. Сигнал e(t) поступает на вход порогового блока 9. При большой ошибке управле- ния, т.е. если сигнал е ,j(t) по модулю превысит порог срабатывания рогового блока 9, т.е.
Ј note4(t)
(7)
на выходе порогового блока 9 формируется сигнал |: I , под действием которого- первый ключ 7 закроется и отклю- чит выход первого сумматора 6 от первого входа второго сумматора 8, а интегратор 4 перейдет в режим Хранения информации. Одновременно под действием выходного сигнала порогового блока 9 второй ключ I3 откроется
и подключит выход релейного блока12
к второму яходу второго гумматора8,
и управление будет осуществлятьсяпо релейному закону
U
(8)
то позволяет максимально использоваться ресурсы регулятора по быстродействию .
I Входной сигнал Y релейного блока 12 в текущий момент времени формиру- е,тся в виде
А, если е (t) У - А, если е 3(t)C- (9 -)
(t - Д) , если |e3(t)UЈ
11
А
уровень выходного сигнала релейного блок ч 12|20
п
(t-dD) - выходной сигнал релей- I наго блока J2 в лрадьщу- щий pa.cf гриваемому момент врем- HH j 25 - величина зо ш ьГечувстви- тельнос1 гистерезиса) релейного блока 12, причем величина t чала.
U Y, . + V ,
1,1 4- I
где
и Y - определяются выражениями (1) (2) соответственно.
При использовании селектора 3, ос ществляющего выбор канала 26 управле ния по максимальной величине сигнала рассогласования & (t) на его перВвиду наличия гистерезиса релейный зо вый.36, второй 37 и третий 38 выходы
фшк 12 обладает памятью, так как ее- j и сигнал e,(t) не г-ре во с ходит величины if s то на выходе релейного блока 2 сохраняется значение сигнала, рав- |юе значению сигнала в предыдущий
Y t-a-e
t- n 1) момент времени, т.е
Элементы i1 с зонами нечувствительности , на выходах которых формируются сигналы X ц (t), поступающие иа третьи входы селектора 3, уставов- Лены с целью обеспечения заданного уровня нечувствительности релейного (Блока 12 помехам, определяемого Величиной с/1 5 которая .
Таккм образом, выходной сигнал ре-.ц го управления.
лейного блока 2 формируется в зависимости от знака выходного сшнала Kft.(t) нелинейного элемента П с зоной нечувствительности.
Рассмотрим работу регулятора при малых ошибках управления. В зтск случае выполняется усповие
|e,(t)| ,Ј
(1C)
и пороговый блок 9 формирует на своем .- выходе сигнал О ,под действием которого первый ключ 7 откроется и подключит выход первого сумматора 6 к первому входу второго сумматора 8, а
0
5
0
интегратор ч перейдет в pexvi г л тегрированис , Переый - епинеКНмГг блок 25 с зоной нечувствительное У Г, предназначен для предотвращения автоколебаний выходной координаты в малом (около положения статики), т.е. он пропускает на вход интегратора 4 сигнал рассогласования только при превышении этим сигналом зоны нечувствительности Ј .
Одновременно под действием выходного сигнала порогового блока 9 второй ключ 13 закроется и отключит выход релейного блока 12 от второго зхода сумматора 8. В этом случае управление будет осуществлять по пропорционально-интегральному закону, обеспечивающему высокую статическую очностъ и помехозащищенность.
U Y, . + V ,
1,1 4- I
где
и Y - определяются выражениями (1) (2) соответственно.
При использовании селектора 3, осуществляющего выбор канала 26 управления по максимальной величине сигнала рассогласования & (t) на его первый.36, второй 37 и третий 38 выходы
5
Q
поступают соответственно выходкой сигнал Y.Cfc) пропорционального блока 15 сигнал рассогласования (t) и выходной сигнал Хп (с) элемента 11 с зоной нечувствительности 1-го канала 26 управления, в котором сигнал рассогласования л,4(с) максимален. В остальном работа регуляюра аналогична описанной.
Значения коэффициентов К,3;,, К,, К , а также величин и, -, С , Ј,, А, и С выбираются в, зависимости от свойств объекта управления и требований, предъявляемых к системе антоматйческо0
-
Таким образом при больших сигналах рассогласования &2(.t)i управление осуществляется по релейпому закону, что позволяет пол/чить высокое быстродействие за счет максимального использования рзсурсов регулятора по быстродействию.
При этом закор управления формируется в зависимости о знака прира- цения (т.е. ПРОИЗВОДНОЙ) сигнала рассогласования. Fcr-ользование знака приращения сигнала рассогласования в условиях действия гтомех является более досговерным, чем использование
величины сигнала производной. Поэтому такое формирование сигнала управления позволяет повысить стабильность последнего, а значит быстродействие , при сигналах рассогласования (О | Ј управление осуществляется по пропорционально-интегральному закону, который обеспечивает высокую статическую точность и помехозащищен- ность регулятора.
Формула изобретения
малых UZ 24,
Многоканальный регулятор, содер- жащий п каналов управления, подключенных первым и вторым выходами к первому и второму входам соответствующей группы входов селектора каналов, соединенного первым выходом с первым вхо дом первого сумматора, а вторым выходом - с входами первого нелинейного блока и порогового блока, подключенного выходом к управляющим входам первого ключа и интегратора, соединенного информационным входом с выходом первого нелинейного блока, а выходом - с входом второго нелинейного блока, а каждый канал управления содержит попорциональный блок и последовательно соединенные измеритель
«Q
( д2895 О
рассогласования, дифференцирующий фильтр и элемент с зоной нечувствительности, причем вход пропорционального блока соединен с выходом измерителя рассогласования, а выходы пропорционального блока и измерителя рассогласования являются пер- вым и вторым выходами канала управления, отличающийся тем, что, с целью повышения быстродействия регулятора, в него дополнительно введены последовательно соединенные релейный опок, второй ключ и второй сумматор, выход которого является выходом регулятора, а второй вход подключен к выходу первого ключа, соединенного управляющим входом с управляющим входом второго ключа, а информационным входом - с выходом первого сумматора, подключенного вторым входом к выходу второго нелинейного блока, третьи выходы каналов управления подключены к третьим входам соответствующих групп входов селектора каналов, соединенного третьим выходом с входом релейного блока, причем в каждом канале управления выход элемента с зоной нечувствительности является третьим выходом канала управления.
25
30
Фм.
| Боднер В.А | |||
| и др | |||
| Системы автоматического управления двигателей летательных аппаратов | |||
| М.: Машиностроение, 1973, с | |||
| Пуговица | 0 |
|
SU83A1 |
| Интегральные системы автоматического управления силовыми установками самолетов | |||
| Под ред | |||
| А.А.Шевякова | |||
| М.: Машиностроение, 1983, с | |||
| Нагревательный прибор для центрального отопления | 1920 |
|
SU244A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
