2. Электропривод по п. 1, о т пичающийся тем, что пороговый элемент содержит инвертирующий усилитель и элемент смещения, соединенный с управляющим входом порогового элемента и подключенный своим выходом к входу суммирующего усилителя, выход которого соединен с
двумя входами нелинейного элемента, с одним непосредственно, а с другим через инвертирующий усилитель, третий вход нелинейного элемента является входом порогового элемента, а его выход соединен с входом выпрямителя, выход которого служит выходом порогового элемента.
| название | год | авторы | номер документа |
|---|---|---|---|
| Электропривод с подчиненным регу-лиРОВАНиЕМ пАРАМЕТРОВ | 1978 |
|
SU813645A1 |
| Электропривод с подчиненным регулированием параметров | 1985 |
|
SU1307526A2 |
| Устройство для управления электроприводом постоянного тока | 1980 |
|
SU900392A1 |
| Устройство для управления электроприводом постоянного тока | 1981 |
|
SU1001405A1 |
| Электропривод с подчиненным регулированием параметров | 1983 |
|
SU1239819A1 |
| Устройство для управления электроприводом постоянного тока | 1981 |
|
SU1001404A2 |
| Задатчик интенсивности для быстродействующего электропривода | 1980 |
|
SU900389A1 |
| Устройство для управления процессом выбора зазоров механических передач в двухдвигательном электроприводе поворота экскаватора | 1983 |
|
SU1129301A1 |
| Электропривод с подчиненным регулированием параметров | 1981 |
|
SU997215A2 |
| Реверсивный вентильный электропривод | 1982 |
|
SU1138913A1 |
1. ЭЛЕКТРОПРИВОД С ПОДЧИНЕННЬМ РЕГУЛИРОВАНИЕМ ПАРАМЕТРОВ по авт. св. № 813645, отличающийся тем, что, с целью стабилизации динамических характеристик электропривода, в него введены последовательно соединенные дифференцирующее звено и сумматор, а порого- . вый элемент выполнен управляемым, при этом вход дифференцирующего звена подключен к датчику скорости, второй вход введенного сумматора соединен с датчиком тока, а выход сумматора связан с управляющим входом порогового элемента. (Л С 00 ел г
I
Изобретение относится к электротехнике, а именно к управлению автоматизированными электроприводами постоянного тока, и может быть использовано в электроприводах подач метал лорежущих станков.
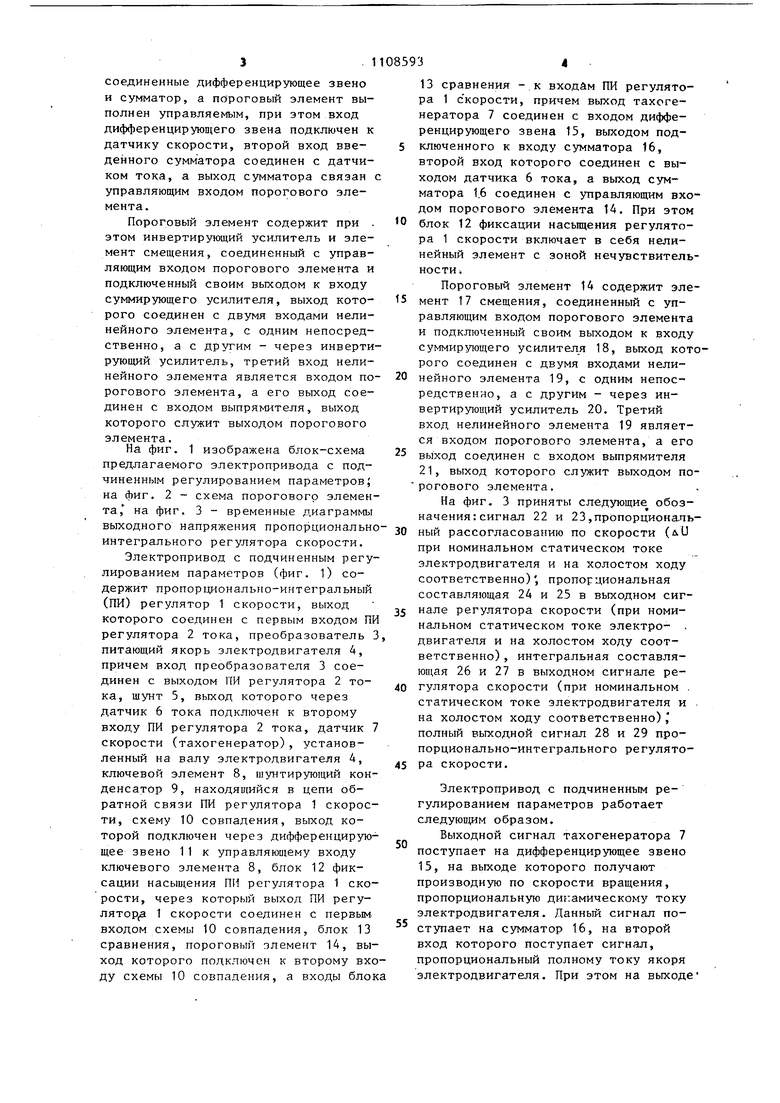
По основному авт. св. № 813645 известен электропривод с подчиненным регулированием параметров, содержащи преобразователь, питающий якорь элек тродвигателя, систему управления с последовательно включенными пропорционально-интегральными регуляторами скорости и тока, ключевой элемент включенный параллельно конденсатору репи обратной свяэи регулятора скорости, а также соединенньй с задатчиком и датчиком скорости блок сравнения, пороговый элемент, блок фиксации насьпцения регулятора скорости, схему совпадения и дифференцирующее звено, при этом выход блока сравнения через пороговый элемент соединен с одним из входов схемы совпадения, другой вход которой соединен с выходом блока фиксации насьщения регулятора скорости, подключенного к выходу регулятора, а выход схемы совпадения через дифференцирующее звено соединен с управляющим входом ключевого элемента 1.
Недостаток известного электропривода с подчиненным регулированием параметров - неудовлетворительные динамические характеристики электропривода при изменении в широких пределах момента статической нагрузки электродвигателя, а именно большое перерегулирование по скорости и большая, соответственно, длительность времени переходного процесса в электроприводе, объясняющиеся тем, что в динамических режимах при насыщении- пропорционально-интегрального регулятора скорости в моменты уменьшения рассогласования по скорости до &U(U ) происходит разряд потенциала конденсатора в цепи обратной связи регулятора скорости путем его закорачивания ключевым элементом. Однако при изменении величины момента статической нагрузки электродвигателя в известном электроприводе при насыщении регулятора скорости происходит не оптимальный выбор момента времени разряда потенциала конденсатора, находящегося в цепи обратной связи регулятора скорости (момент времени разряда конденсатора в известном электроприводе строго определяется величиной рассогласования по скорости л U, которая является величиной постоянной). Это приводит к тому, что пропорционально-интегральный регупятор скорости после разряда конденсатора в цепи обратной связи снова насыщается, и известный электропривод теряет свои преимущества перед обычной системой подчиненного регулирования при изменении в широких пределах момента статической нагрузки электродвигателя. Таким образом, известный электропривод с подчиненным регулированием параметров имеет неудовлетворительные динамические характеристики по управляющему воздействию при изменени момента статической нагрузки электродвигателя .
Цель изобретения - стабилизация динамических характеристик электропривода. .
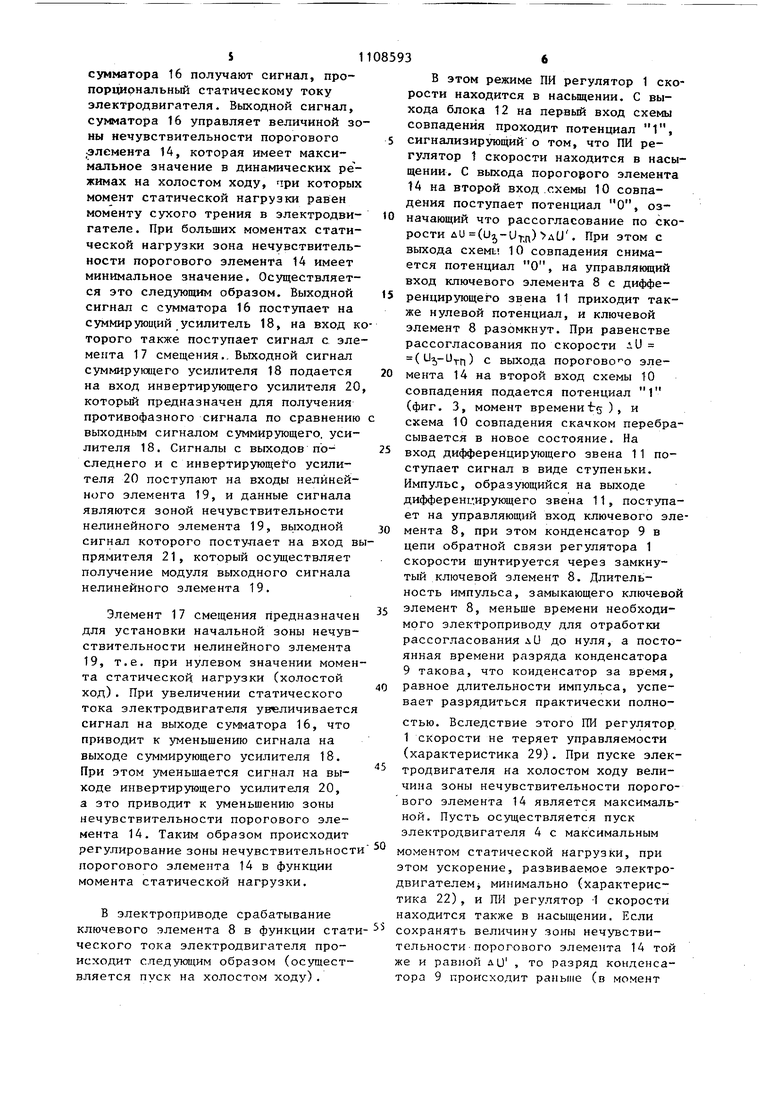
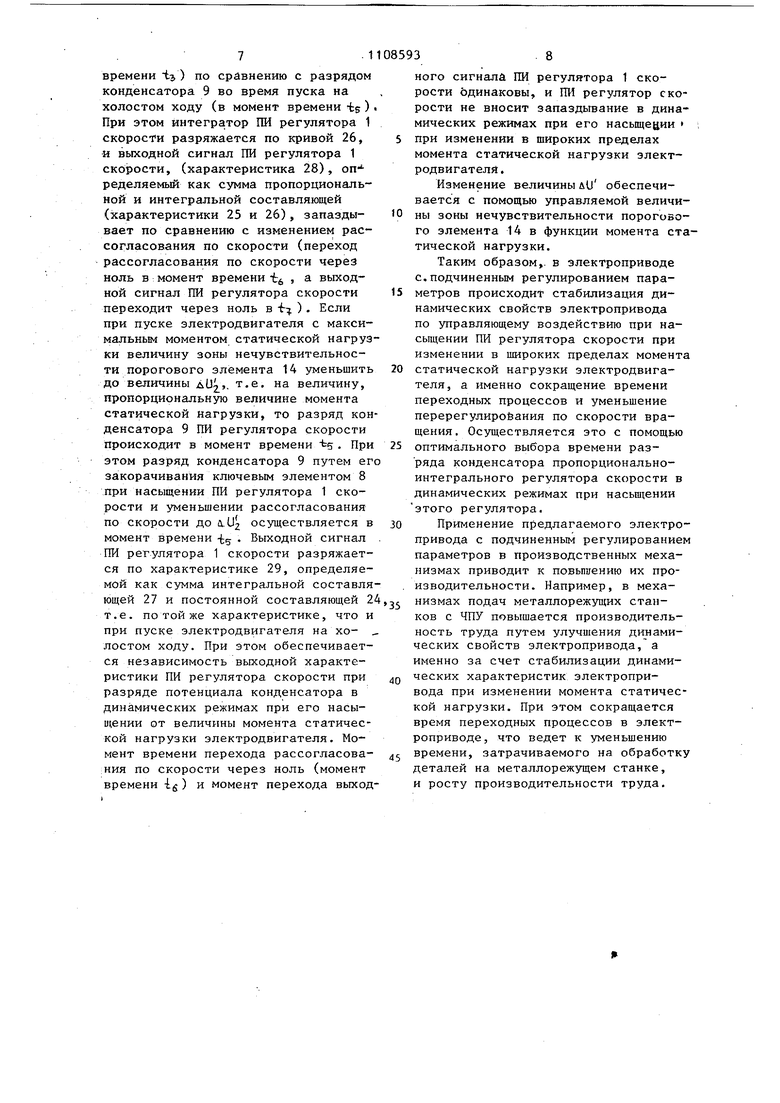
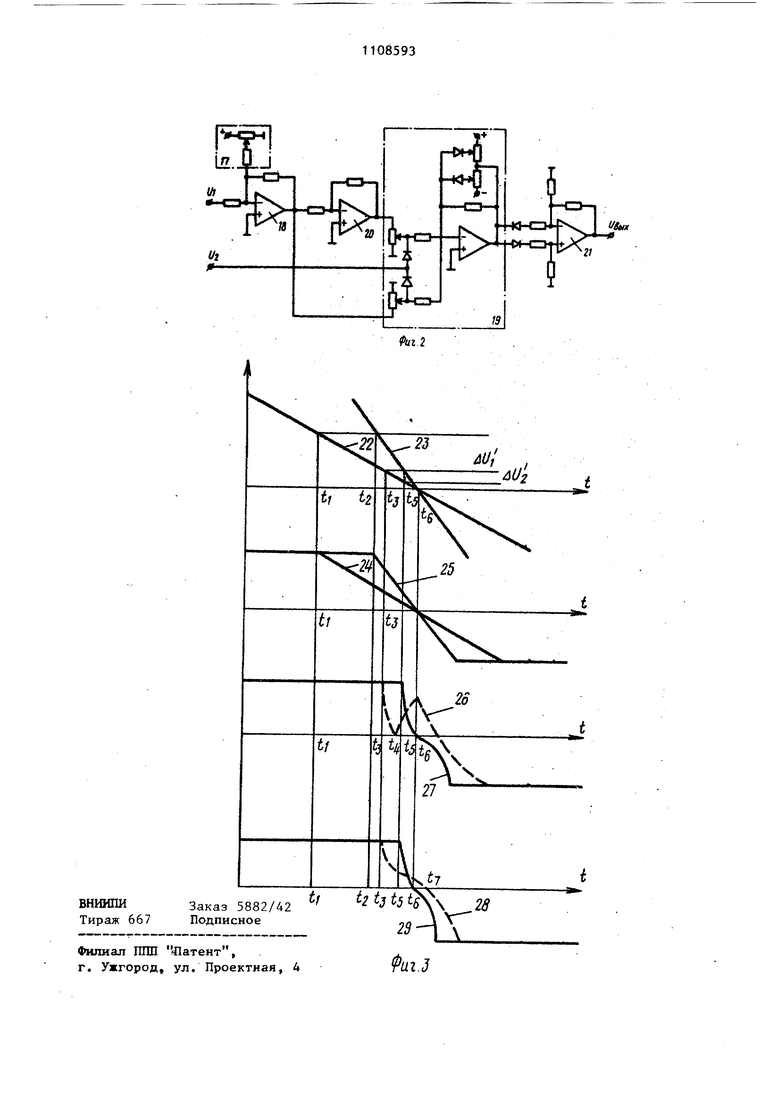
Цель достигается тем, что в электропривод введены последовательно 31 соединенные дифференцирующее звено и сумматор, а пороговый элемент выполнен управляемым, при этом вход дифференцирующего звена подключен к датчику скорости, второй вход введенного сумматора соединен с датчиком тока, а выход сумматора связан управляющим входом порогового элемента. Пороговый элемент содержит при . этом инвертирующий усилитель и элемент смещения, соединенный с управляющим входом порогового элемента и подключенный своим выходом к входу суммирующего усилителя, выход которого соединен с двумя входами нелинейного элемента, с одним непосредственно, а с другим - через инверти рующий усилитель, третий вход нелинейного элемента является входом по рогового элемента, а его выход соединен с входом выпрямителя, выход которого служит выходом порогового элемента. На фиг. 1 изображена блок-схема предлагаемого электропривода с подчиненным регулированием параметровJ на фиг. 2 - схема порогового элемен та , на фиг, 3 - временные диаграммы выходного напряжения пропорциональн интегрального регулятора скорости. Электропривод с подчиненным регу лированием параметров (фиг. 1) содержит пропорид онально-интегральный (пи) регулятор 1 скорости, выход которого соединен с первым входом П регулятора 2 тока, преобразователь питающий якорь электродвигателя 4, причем вход преобразователя 3 соединен с выходом ПИ регулятора 2 тока, шунт 5, выход которого через датчик 6 тока подключен к второму входу ПИ регулятора 2 тока, датчик скорости (тахогенератор), установленный на валу электродвигателя 4, ключевой элемент 8, шунтирующий кон денсатор 9, находящийся в цепи обратной связи ПИ регулятора 1 скорос ти, схему 10 совпадения, выход которой подключен через дифференцирую щее звено 11 к управляющему входу ключевого элемента 8, блок 12 фиксации насыщения ПИ регулятора 1 ско рости, через который выход ПИ регулятору 1 скорости соединен с первым входом схемы 10 совпадения, блок 13 сравнения, пороговый элемент 14, вы ход которого подключен к второму вх ду схемы 10 совпадения, а входы бло 3 13 сравнения - к входам ПИ регулятора 1 скорости, причем выход тахогенератора 7 соединен с входом дифференцирующего звена 15, выходом подключенного к входу сумматора 16, второй вход которого соединен с выходом датчика 6 тока, а выход сумматора 1.6 соединен с управляющим входом порогового элемента 14. При этом блок 12 фиксации насьпцения регулятора 1 скорости включает в себя нелинейный элемент с зоной нечувствительностиПороговый элемент 14 содержит элемент 17 смещения, соединенный с управляющим входом порогового элемента и подключенный своим выходом к входу суммирующего усилителя 18, выход которого соединен с двумя входами нелинейного элемента 19, с одним непосредственно, а с другим - через инвертирующий усилитель 20. Третий вход нелинейного элемента 19 является входом порогового элемента, а его выход соединен с входом выпрямителя 21, выход которого служит выходом порогового элемента. На фиг, 3 приняты следующие обозначения: сигнал 22 и 23,пропорционапьный рассогласованию по скорости (&U при номинальном статическом токе электродвигателя и на холостом ходу соответственно), пропорциональная составляющая 24 и 25 в выходном сигнале регулятора скорости (при номинальном статическом токе электродвигателя и на холостом ходу соответственно) , интегральная составляющая 26 и 27 в выходном сигнале регулятора скорости (при номинальном . статическом токе электродвигателя и . на холостом ходу соответственно)j полный выходной сигнал 28 и 29 пропорционально-интегрального регулятора скорости. Электропривод с подчиненным регулированием параметров работает следуюищм образом. Выходной сигнал тахогенератора 7 поступает на дифференцирующее звено 15, на выходе которого получают производную по скорости вращения, пропорциональную динамическому току электродвигателя. Данный сигнал поступает на сумматор 16, на второй вход которого поступает сигнал, пропорциональный полному току якоря электродвигателя. При этом на выходе S сумматора 16 получают сигнал, пропорциональный статическому току электродвигателя. Выходной сигнал, сумматора 16 управляет величиной зо ны нечувствительности порогового ,-элемента 14, которая имеет максимальное значение в динамических ре жимах на холостом ходу, чри которых момент статической нагрузки равен моменту сухого трения в электродвигателе . При больших моментах статической нагрузки зона нечувствительности порогового элемента 14 имеет минимальное значение. Осуществляется это следующим образом. Выходной сигнал с сумматора 16 поступает на суммирующий усилитель 18, на вход к торого также поступает сигнал с эле мента 17 смещения.. Выходной сигнал суммируюи1его усилителя 18 подается на вход инвертирующего усилителя 20 который предназначен для получения противофазного сигнала по сравнению выходным сигналом суммирующего, усилителя 18. Сигналы с выходов последнего и с инвертирующего усилителя 20 поступают на входы нелинейного элемента 19, и данные сигнала являются зоной нечувствительности нелинейного элемента 19, выходной сигнал которого поступает на вход в прямителя 21, который осуществляет получение модуля выходного сигнала нелинейного элемента 19. Элемент 17 смещения предназначен для установки начальной зоны нечувствительности нелинейного элемента 19, т.е. при нулевом значении момен та статической нагрузки (холостой ход). При увеличении статического тока электродвигателя увеличивается сигнал на выходе сумматора 16, что приводит к уменьшению сигнала на выходе суммирующего усилителя 18. При этом уменьшается сигнал на выходе инвертирующего усилителя 20, а это приводит к уменьшению зоны нечувствительности порогового элемента 14. Таким образом происходит регулирование зоны нечувствительност порогового элемента 14 в функции момента статической нагрузки. В электроприводе срабатывание ключевого элемента 8 в функции стат ческого тока электродвигателя происходит следующим образом (осуществляется пуск на холостом ходу). 3 В этом режиме ПИ регулятор 1 скорости находится в насыщении. С выхода блока 12 на первый вход схемы совпадения проходит потенциал 1, сигнализирующий о том, что ПИ регулятор 1 скорости находится в насыщении. С выхода порогорого элемента 14 на второй вход .схемы 10 совпадения поступает потенциал О, означающий что рассогласование по скорости ди (u,-U7-,n) A(J . При этом с выхода схемы 10 совпадения снимается потенциал О, на управляющий вход ключевого элемента 8 с дифференцирующего звена 11 приходит также нулевой потенциал, и ключевой элемент 8 разомкнут. При равенстве рассогласования по скорости лУ ( Ua)-L).rri) с выхода порогово о элемента 14 на второй вход схемы 10 совпадения подается потенциал 1 (фиг. 3, момент времениt), и схема 10 совпадения скачком перебрасывается в новое состояние. На вход дифференцирующего звена 11 поступает сигнал в виде ступеньки. Импульс, образующийся на выходе дифференцирующего звена 11, поступает на управляющий вход ключевого элемента 8, при этом конденсатор 9 в цепи обратной связи регулятора 1 скорости шунтируется через замкнутый ключевой элемент 8. Длительность импульса, замыкающего ключевой элемент 8, меньше времени необходимого электроприводу для отработки рассогласования лУ до нуля, а постоянная времени разряда конденсатора 9 такоэа, что конденсатор за время, равное длительности импульса, успевает разрядиться практически полностью. Вследствие этого ПИ регулятор. 1 скорости не теряет управляемости (характеристика 29). При пуске электродвигателя на холостом ходу величина зоны нечувствительности порогового элемента 14 является максимальной. Пусть осуществляется пуск электродвигателя 4 с максимальным оментом статической нагрузки, при том ускорение, развиваемое электровигателем j минимально (характерисика 22) , и ПИ регулятор -1 скорости аходится также в насыщении. Если охранять величину зоны нечувствиельности порогового элеме)1та 14 той е и равной дО , то разряд конденсаора 9 происходит раньше (в момент 7.1 времени tj ) по сравнению с разрядом конденсатора 9 во время пуска на холостом ходу (в момент времени -tg ) При этом интегратор ПИ регулятора 1 скорости разряжается по кривой 26, и выходной сигнал ПИ регулятора 1 скорости, (характеристика 28), оп ределяемый как сумма пропорциональной и интегральной составляющей (характеристики 25 и 26), запаздывает по сравнению с изменением рассогласования по скорости (переход рассогласования по скорости через ноль в момент времени -t , а выходной сигнал ПИ регулятора скорости переходит через ноль в . ) . Если при пуске электродвигателя с максимальным моментом статической нагруз ки величину зоны нечувствительности порогового элемента 14 уменьшить до величины AU2,. т.е. на величину, пропорциональную величине момента статической нагрузки, то разряд кон денсатора 9 ПИ регулятора скорости происходит в момент времени Ь . При этом разряд конденсатора 9 путем ег закорачивания ключевым элементом 8 при насыщении ПИ регулятора 1 скорости и уменьшении рассогласования по скорости до U.U2 осуществляется в момент времени -t . Выходной сигнал ПИ регулятора 1 скорости разряжается по характеристике 29, определяемой как сумма интегральной составля ющей 27 и постоянной составляющей 2 т.е. по той же характеристике, что и при пуске электродвигателя на холостом ходу. При этом обеспечивается независимость вькодной характеристики ПИ регулятора скорости при разряде потенциала конденсатора в динамических режимах при его насыщении от величины момента статической нагрузки электродвигателя. Момент времени перехода рассогласования по скорости через ноль (момент времени 4. ) и момент перехода вьгход 3 ного сигнала ПИ регулятора 1 скорости одинаковы, и ПИ регулятор скорости не вносит запаздывание в динамических режимах при его насьщеции при изменении в широких пределах момента статической нагрузки электродвигателя. Изменение величины AU обеспечивается с помощью управляемой величины зоны нечувствительности порогового элемента 14 в функции момента статической нагрузки. Таким образом,, в электроприводе с.подчиненным регулированием параметров происходит стабилизация динамических свойств электропривода по управляющему воздействию при насьпцении ПИ регулятора скорости при изменении в широких пределах момента статической нагрузки электродвигателя, а именно сокращение времени переходных процессов и уменьшение перерегулироёания по скорости вращения. Осуществляется это с помощью оптимального выбора времени разряда конденсатора пропорциональноинтегрального регулятора скорости в динамических режимах при насьш1ении этого регулятора. Применение предлагаемого электропривода с подчиненным регулированием параметров в производственных механизмах приводит к повьпиению их производительности. Например, в механизмах подач металлорежущих станКОВ с ЧПУ повышается производительность труда путем улучшения динамических свойств электропривода, а именно за счет стабилизации динамических характеристик электропривода при изменении момента статической нагрузки. При этом сокращается время переходных процессов в электроприводе, что ведет к уменьшению времени, затрачиваемого на обработку деталей на металлорежущем станке, и росту производительности труда.
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Электропривод с подчиненным регу-лиРОВАНиЕМ пАРАМЕТРОВ | 1978 |
|
SU813645A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
