1
(21)4432304/25- 8
(22)30.05.88
(46) 15.01.90. Бюл. У 2
(71)Одесский технологическим институт пищевой промышленности
им. М.В.Ломоносова
(72)Р.В.Амбарцумянц и Л.п.Пигын
(53)621.827.(088.8)
(56)Авторское свидетельство ГТР V 1472731, кл. Г 16 il 21/42, 1ч87.
(54)КРИВОШИП РПГУЛНРУГМОЛ ДЛИН
(57)Изобретение относится к кривошипным механизмам с регулируемой дан ной кривошипа и мола г применяться i устройстве -с, грр требуется и.зч енение законов движения выходных звеньев без остановки механизма. Чель изоГ1 ретения - повышение на елностп мол низма за счет сохранения его CTPTI ческой и динамической уравновешенности независимо от длины крнвоиипа. В потоком положении диски 6, 7, 8 и
ткрепченный на диске 7 кривошипный на гогг 12 концентпнчны оси вращения вялов 1 и 3, которые вращаются синх- poi.iio. Крутящий момент от ведутчего вал i 1 на диск 7 перелается через ишравпяюпую 5. Для измененья длины крнг опипа регулировочном г валу 3 от пр гвода управпения ссобшают вращение относительно вала 1. При отом зубчатое i оаесо 4 через зубчатые рейки 9, 10 и 1 перемещает писки 6 и 7 в ОДНУ сторону, а диск 8 - в другую. Так как с ма масс дисков 6 и 7 рагна массе тиска 8, механизм сохраняет ст i- ГИЧССКУЮ и динамическую уровновешен- носчъ при любом положении дисков 6, 7 и 8. 2 ил.
i
(Л
| название | год | авторы | номер документа |
|---|---|---|---|
| Встряхиватель для пробирок | 2023 |
|
RU2821211C1 |
| ИМПУЛЬСНАЯ БЕССТУПЕНЧАТАЯ ПЕРЕДАЧА | 2002 |
|
RU2240456C2 |
| ИМПУЛЬСНАЯ БЕССТУПЕНЧАТАЯ ПЕРЕДАЧА | 2002 |
|
RU2240455C2 |
| СПОСОБ И УСТРОЙСТВО РЕГУЛИРОВАНИЯ УГЛА ВЫСТОЯ ЗУБЧАТО-РЫЧАЖНОГО МЕХАНИЗМА | 2005 |
|
RU2285168C1 |
| РЕГУЛИРУЕМОЕ УСТРОЙСТВО ДЛЯ ПРЕОБРАЗОВАНИЯ ВРАЩАТЕЛЬНОГО ДВИЖЕНИЯ В КОЛЕБАТЕЛЬНОЕ | 2005 |
|
RU2307271C1 |
| Манипулятор с возвратно-поступательным движением захватных устройств | 2023 |
|
RU2822909C1 |
| Лабораторный встряхиватель | 2023 |
|
RU2819973C1 |
| Механический вариатор скорости вращения | 1985 |
|
SU1414990A1 |
| Манипулятор для передачи изделий | 2023 |
|
RU2822908C1 |
| Устройство для захвата и подачи плоских изделий | 1986 |
|
SU1375548A1 |
Изобретение относится к кривошипным механизмам с регулируемой длиной кривошипа и может применяться в устройствах, где требуется изменение законов движения выходных звеньев без остановки механизма. Цель изобретения - повышение надежности механизма за счет сохранения его статической и динамической уравновешенности независимо от длины кривошипа. В исходном положении диски 6, 7, 8 и закрепленный на диске 7 кривошипный палец 12 концентричны оси вращения валов 1 и 3, которые вращаются синхронно. Крутящий момент от ведущего вала 1 на диск 7 передается через направляющую 5. Для изменения длины кривошипа регулировочному валу 3 от привода управления сообщают вращение относительно вала 1. При этом зубчатое колесо 4 через зубчатые рейки 9, 10 и 11 перемещает диски 6 и 7 в одну сторону, а диск 8 - в другую. Так как сумма масс дисков 6 и 7 равна массе диска 8, механизм сохраняет статическую и динамическую уравновешенность при любом положении дисков 6, 7 и 8. 2 ил.
ел
со
05
Изобретение относится к машиностроению., л именно к кривошипным механизмам с регулируемой длиной кривошипа, и найдет применение в устройствах, где требуется изменение законов движения выходных звеньев без остановки механизма.
Цель изобретения - повышение надежности механизма за счет сохранения его статической и динамической урав- новев енности независимо от длины кривошипа.
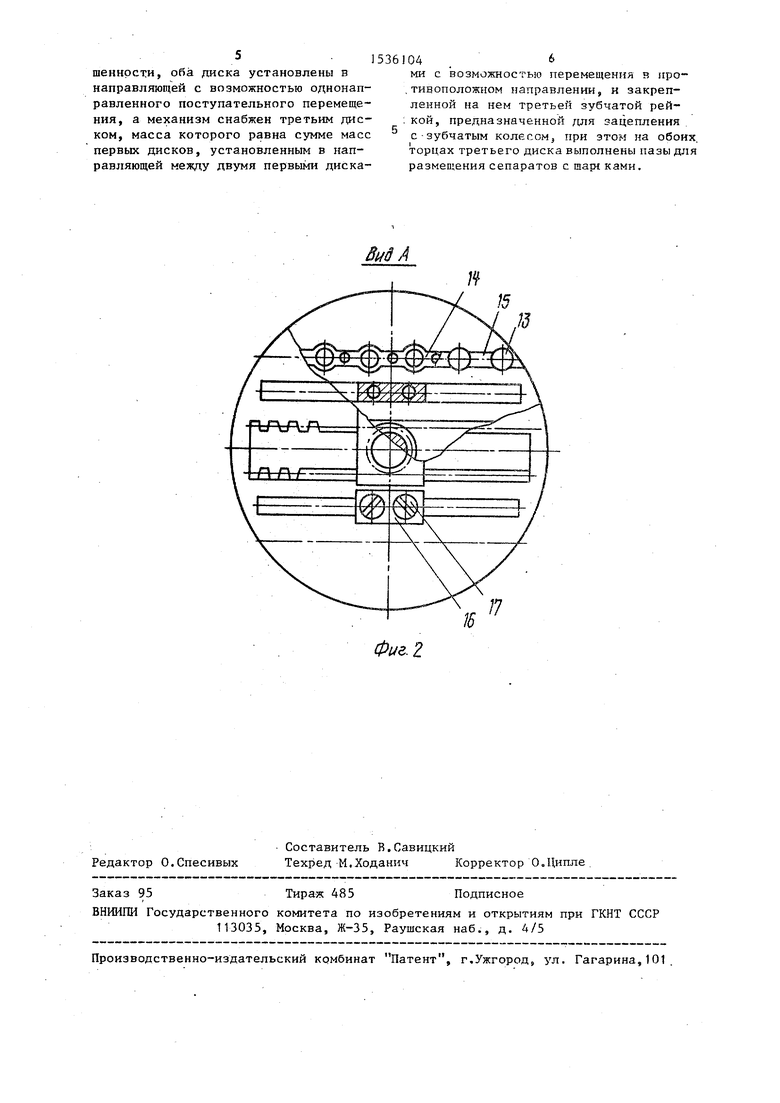
На фиг. 1 показана конструктивная схема механизма $ на фиг,, 2 - вид А на фиг. 1.
Механизм содержит полый ведущий вал 1 , в полости которого на подшипнике 2 скольжения с возможностью относительного вращения установлен уп- равняющий вал 3 с- закрепленным на нем зубчатым колесом 4. На ведущем валу 1 закреплена прямолинейная направляющая 5, продольная ось которой перпендикулярна оси вращения валов 1 и 3 и пересечена с нею. В направляющей 5 установлены три диска 6-8. Крайние диски 6 и 7 имеют равные массы, и на них закреплены зубчатые рейки 9 и 10, которые входят в зацепление с зубчатым колесом 4. Средний диск 8 имеет массу, равную сумме масс дисков 6 и 7, а закрепленная на нем зубчатая рейка 11, также входящая л зацепление с зубчатым колесом 4, расположена диамртрачьно противоположно зубчатым рейкам 9 и 10 дисков 6 и 7. Благодаря этому диски 6 и 7 имеют однонаправленное перемещение по направляющей 5, а диск 8 движется в обратном направлении. В центре диска 7 закреплен кривошипный палец 12. Для снижения сил трения между торцами дисков 6-8 при их относительном перемещении между ними установлены шари- ки 13, заключенные в сепараторы 14 и перекатывающиеся по пазам 15 в,обращенных друг к другу торцах дисков 6-8. Пазы 15 параллельны направляющей 5 и равноудалены от оси вращения валов 1 и 3. Диски 6-8 зафиксированы на направляющей 5 от продольного смещения с одной стороны торцом вапа 1, а с другой стороны ограничителями 16 прикрепленными к направляющей 5 винтами 17. Ведущий вал 1 устанечлеч в корпусе 18.
Механизм работает следующим образом .
0 5 0 5
0
5
0
5
В исходном положении диски установлены концентрично, а ось кривошипного пачьца 12 совмещена с осью вращения валов 1 и 3. Валы 1 и 3 получают сихронное вращение, а выходное звено, соединенное с кривошипным пальцем 12 (не показано), остается неподвижным. Крутящий момент на диски 6-8 передается через направляющую 5, Для изменения JUIHHL; кривошипа управляющему валу 3 от привода управления (не показан) сообщают дополнительное вращение относительно вала 1. При этом зубчатое колесо 4 через зубчатые рейки 9-11 перемещает по направляющей 5 диски 6 и 7 в одну сто- сторону, а диск 8 - в другую. Вместе . с диском 7 перемещается и кривошипный палеи 12, от которого начинает получать еооГВР н-твукщее движение выходное звено механизма.
При смещении кривошипного пальца 12 на требуемую величину привод управления откчючают, и валы 1, 3 продолжают синхронное вращение. Благодаря симметричному расположению дисков 6 и 7 относительно диска 8 и равенств4,, суммы их масс МЧССР диска
8 кривошипчыч механизм сохраняет статическую и динамическую уравновешенность не-зависнмо от взаимного расположения дисков 6-8.
Ф о р м у и я изобретения
Кривошип регулируемой длины, содержании; иолыи нг-лущий вал с жестко закрепленной на нем прямо-швейной направляющей, продопьная ось которой перпендикулярна оси «ращения вала и пересечена с нею, установленный с возможностью врар(ения в полости ведущего вала управляющий вап с закрепленным на нем зубчатым колесом, установленные в чзпранляюаен концентрично ,ему Ba iv два шска равной массы, в обращенных друг к другу торцах которых выполнены по крайней мере по два паза, параллельные направляющей и раннп лдаценные от оси пра- щзння валов, усгановтенные в пазах сепараторы с шариками и две зубчатые , закреп тнпые по пуной на каждом диске и вход- иче зацепление с зубчачым коле с ом, Р т л и ч а ю - щ и и с ч тем, ч г 1, с целью п -выше- яич надежности статический и Hi -чним им урапнове51536
шенности, оба диска установлены в направляющей с возможностью однонаправленного поступательного перемещения, а механизм снабжен третьим диском, масса которого равна сумме масс J первых дисков, установленным в направляющей между двумя первыми днска04 .
ми с возможностью перемещения в противоположном направлении, н закрепленной на нем третьей зубчатой рейкой, предназначенной для зацепления с зубчатым колесом, при этом на обоих. торцах третьего диска выполнены пазы для размещения сепаратов с шарт ками.
Вид А
15
Ю
17
Фие.2
