Изобретение относится к области машиностроения и может найти применение в переналаживаемых автоматических линиях и в робототехнике, где требуются регулируемые остановки ведомого вала без разрыва кинематической цепи привода.
Известен способ регулирования остановок зубчато-рычажного механизма, заключающийся в том, что вращают ведущее звено механизма и в процессе этого вращения изменяют величину угловой скорости приводного двигателя, что приводит к изменению продолжительности выстоя [1]. Устройство для осуществления данного способа выполнено в виде совокупности рычажного и зубчатого механизмов с постоянными линейными размерами звеньев [1].
Недостатками данного способа являются:
1. Ограниченные кинематические возможности регулирования выстоя механизма в машинах с нерегулируемым по оборотам приводным электродвигателем.
2. Одновременно с изменением продолжительности выстоя изменяется частота остановок ведомого вала механизма (т.е. их число за единицу времени, например за одну минуту), что нарушает заданный технологический цикл.
Также известен способ регулирования угла выстоя зубчато-рычажного механизма, заключающийся в том, что ведущее звено механизма вращают с постоянной угловой скоростью и в процессе этого вращения изменяют длину кривошипа и длину стойки (основания) рычажного механизма [2]. Устройство для осуществления этого способа выполнено в виде совокупности кривошипно-коромыслового рычажного механизма с регулируемой длиной звеньев и передаточного зубчатого механизма [2].
Недостатками указанного способа являются ограниченные кинематические возможности механизма, так как диапазон изменения длины кривошипа и длины стойки очень ограничен из условия кинематической работоспособности рычажного механизма (кривошип не сможет поворачиваться на 360° [4, с.397] и из условия его силовой работоспособности (происходит увеличение углов давления в кинематических парах рычажного механизма и его полное заклинивание) [4, с.318 и 319, рис.18.3].
Наиболее близким по технической сущности и достигаемому эффекту к предлагаемому изобретению является способ регулировании угла выстоя зубчато-рычажного механизма, заключающийся в том, что ведущее звено зубчато-рычажного механизма вращают с постоянной угловой скоростью и в процессе углового поворота ведущего звена зубчато-рычажного механизма изменяют радиусы начальных окружностей входящих в зацепление пар некруглых зубчатых колес, передающих вращательное движение на ведомый вал, и при этом в пределах поворота каждого из секторов зубчатых колес соотношение радиусов начальных окружностей входящих в зацепление пар зубчатых некруглых колес остается постоянным; одно из некруглых зубчатых колес образует блок сателлитов с круглым зубчатым колесом планетарного механизма, а другое входящее с ним в зацепление некруглое зубчатое колесо образует неподвижное основание механизма [3].
Недостатками известного способа является:
1. Ограниченные кинематические возможности механизма вследствие нерегулируемости продолжительности остановки ведомого вала, что сужает область его применения в машинах-автоматах.
2. При переходе от зацепления зубчатого сектора с одним радиусом начальной окружности к зацеплению зубчатого сектора с другим радиусом начальной окружности происходят жесткие удары, которые снижают надежность работы и быстродействие механизма.
Также известно механическое устройство в виде регулируемого зубчато-рычажного механизма, представляющего совокупность кривошипно-ползунного и зубчатого механизмов для преобразования круглыми зубчатыми колесами постоянной угловой скорости вращения ведущего вала в переменную угловую скорость ведомого вала за счет изменения длины стойки (т.е. переменного расстояния между осями вращения ведущего и ведомого колес) [4].
Недостатками известного механизма является нерегулируемая мгновенная остановка ведомого вала [4, с.139, пример 7.10].
Наиболее близким по технической сущности и достигаемому эффекту к предлагаемому изобретению является устройствов виде регулируемого зубчато-рычажного механизма, представляющего совокупность рычажного кривошипно-коромыслового механизма, кривошип и коромысло которого шарнирно соединены с шатуном и основанием, и передаточного зубчатого механизма, содержащего пары круглых зубчатых колес с постоянными радиусами входящих в зацепление колес, передающих вращение от кривошипа на ведомый вал, расположенный соосно с шарниром, соединяющим коромысло с основанием; при этом кривошип выполнен регулируемой длины за счет изменения расстояния между его шарнирами посредством их раздвигания специальным приводом [5].
Недостатками указанного механизма являются ограниченные кинематические возможности по регулированию угла выстоя, так как:
1. Увеличение длины кривошипа ограничено из условия кинематической работоспособности рычажного механизма (согласно известной в теории механизмов и машин теореме Грасгофа [4, с.397] кривошип большой длины не сможет вращаться на 360°).
2. Изменение длины кривошипа приводит к его динамической неуравновешенности относительно основания и вызывает вибрацию всего зубчато-рычажного механизма.
3. Изменение длины кривошипа также приводит к увеличению углов давления в рычажном механизме, т.е. ухудшается его силовая работоспособность (увеличение углов давления в кинематических парах приводит к повышенному трению и заклиниванию рычажного механизма).
4. Усложняется конструкция рычажного механизма в связи с необходимостью выполнения ведущего кривошипа из двух узлов, перемещаемых друг относительно друга посредством управляемого винтового устройства.
В основу изобретения положена техническая задача, заключающаяся в расширении кинематических возможностей зубчато-рычажного механизма за счет увеличения диапазона изменения угла выстоя без нарушения кинематической и силовой работоспособности рычажного механизма при сохранении минимальных углов давления (т.е. при минимальном трении в кинематических парах во всем диапазоне регулирования).
Это достигается за счет того, что в способе регулирования угла выстоя зубчато-рычажного механизма ведущее звено зубчато-рычажного механизма вращают с постоянной угловой скоростью и в процессе углового поворота ведущего звена зубчато-рычажного механизма изменяют радиусы начальных окружностей входящих в зацепление пар некруглых зубчатых колес, передающих вращательное движение на ведомый вал, при этом некруглые зубчатые колеса установлены с возможностью углового поворота с последующей фиксацией относительно звеньев рычажного механизма.
Получение технического результата достигается за счет того, что в механическом устройстве для регулирования угла выстоя по предлагаемому способу, выполненном в виде регулируемого зубчато-рычажного механизма, представляющего совокупность рычажного кривошипно-коромыслового механизма и передаточного зубчатого механизма, последний выполнен в виде зацепляющихся между собой некруглых, например эллиптических, зубчатых колес, попарно смонтированных на звеньях рычажного механизма с возможностью углового поворота и последующей фиксации. Оси вращения первой пары эллиптических зубчатых колес совмещены с шарнирами шатуна, соединяющими его с кривошипом и коромыслом, а оси вращения второй пары эллиптических зубчатых колес совмещены с шарнирами коромысла, соединяющими его с шатуном и основанием, при этом ведущее эллиптическое колесо первой пары закреплено на кривошипе с возможностью углового поворота и последующей фиксации на нем, ведущее эллиптическое колесо второй пары сблокировано с ведомым эллиптическим колесом первой пары с возможностью углового разворота между собой и последующей фиксации, а ведомое эллиптическое колесо второй пары закреплено на ведомом валу. Сблокированный с кривошипно-коромысловым механизмом передаточный зубчатый механизм может быть выполнен в виде последовательно расположенных в зацеплении пары некруглых зубчатых колес и пары круглых зубчатых колес, устанавливаемых на шатуне или коромысле, или в виде двух пар овальных зубчатых колес, или в виде последовательно расположенных и в шарнире установленных на шатуне и на коромысле пары эллиптических зубчатых колес, оси вращения которых совмещены с полюсом эллипса F1, и пары овальных зубчатых колес, оси вращения которых совмещены с центрами их симметрии. Уравновешивание эллиптических некруглых колес относительно фокуса эллипса F1, совмещаемого с шарниром рычажного механизма и соответственно с осью вращения некруглого колеса, достигается путем расположения отверстия на большой полуоси эллипса, например, в фокусе эллипса F2.
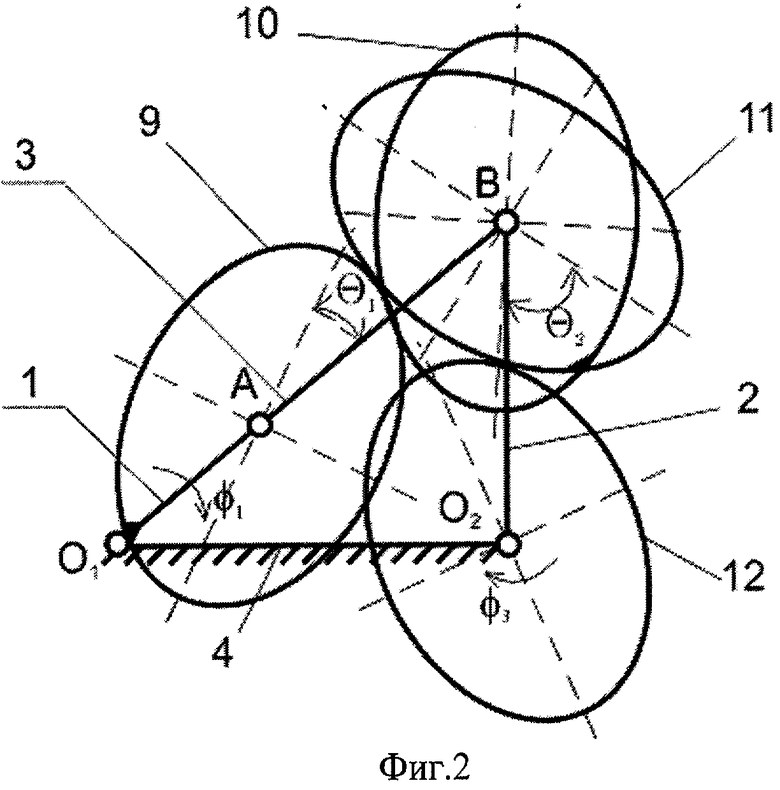
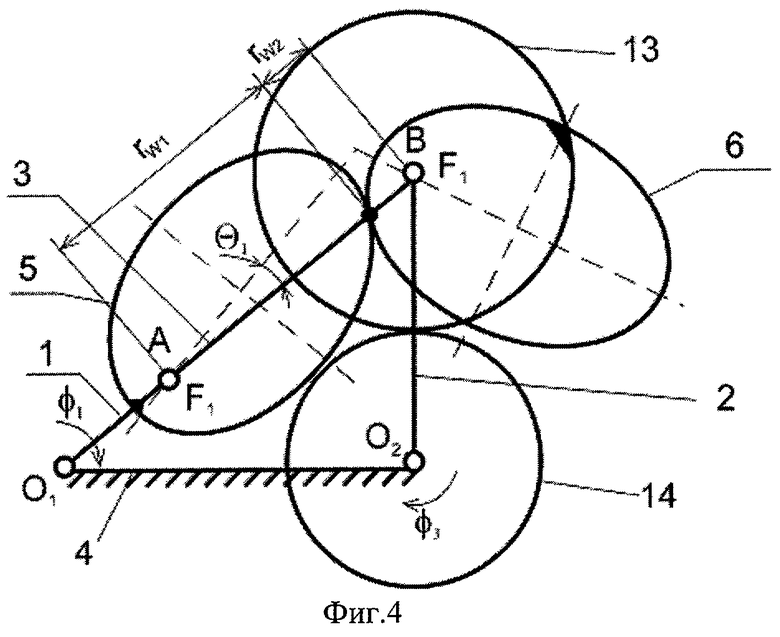
Сущность изобретения поясняется чертежами, где на фиг.1, 2, 3, 4 представлены кинематические схемы механического устройства, осуществляемого предлагаемый способ регулирования угла выстоя зубчато-рычажного механизма. На фиг.1 дана схема устройства в виде регулируемого зубчато-рычажного механизма, в котором передаточный зубчатый механизм выполнен в виде сочетания двух пар эллиптических зубчатых колес; на фиг.2 - то же, в виде овальных зубчатых колес; на фиг.3 - то же, в виде последовательно установленных одной пары эллиптических и одной пары овальных зубчатых колес; на фиг.4 - то же, в виде сочетания одной пары эллиптических и одной пары круглых зубчатых колес.
На фиг.1 через θ1 и θ2 обозначены углы установки некруглых зубчатых колес (регулируемое угловое смещение большой полуоси некруглых колес) относительно шатуна и коромысла рычажного механизма при расположении на одной прямой кривошипа и шатуна (фиг.1).
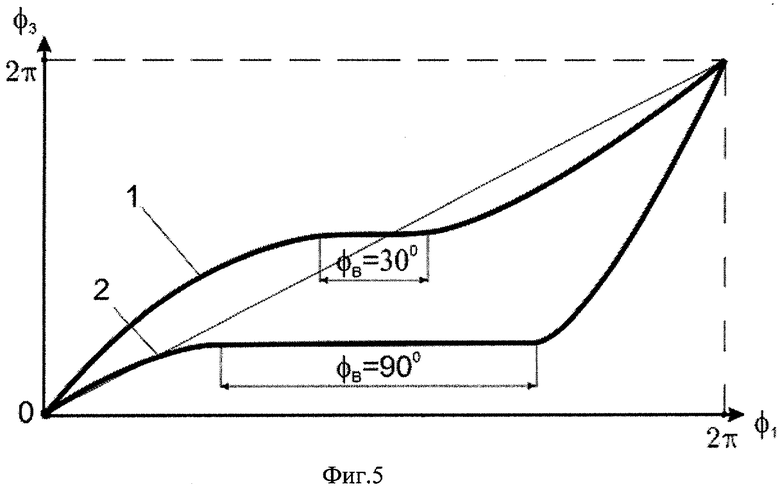
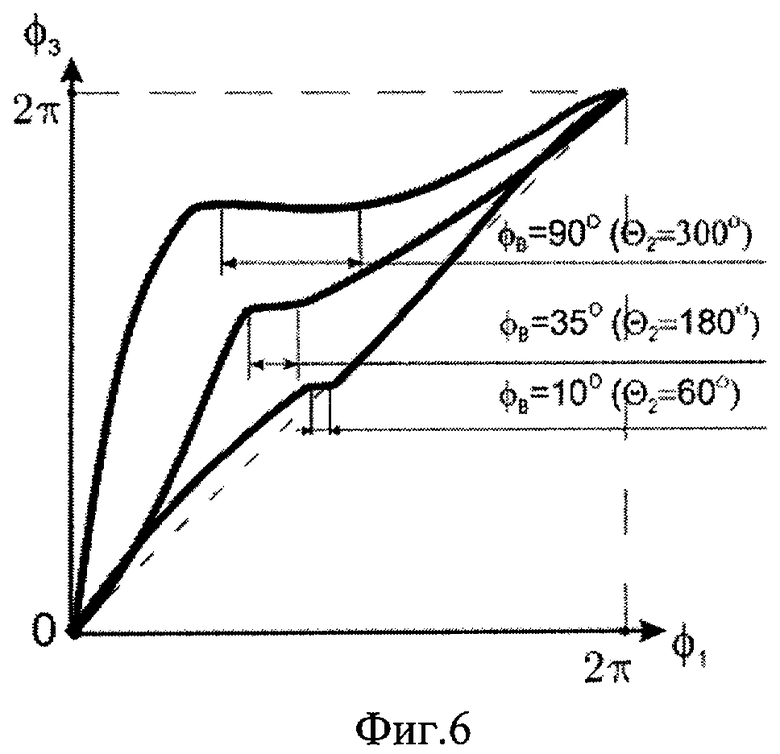
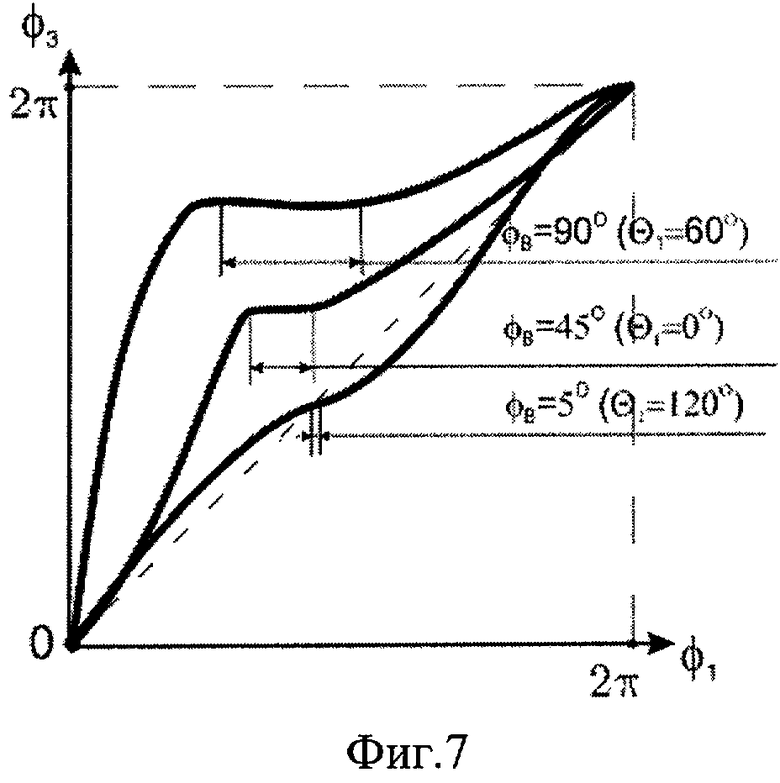
На фиг.5 показан график изменения угла выстоя ϕB в зубчато-рычажном механизме с круглыми колесами (ϕB=30° на кривой 1) и в зубчато-рычажном механизме с эллиптическими некруглыми зубчатыми колесами (ϕB=90° на кривой 2). На фиг.6 и 7 показаны графики регулирования угла выстоя в зубчато-рычажном механизме с эллиптическими некруглыми зубчатыми колесами за счет изменения углов установки θ1 и θ2 некруглых зубчатых колес относительно звеньев рычажного механизма. На графиках (фиг.5, 6, 7) обозначено: ϕ1 - угол поворота ведущего кривошипа; ϕ3 - угол поворота закрепленного на ведомом валу ведомого колеса второй пары 8.
Устройство в виде регулируемого зубчато-рычажного механизма представляет совокупность рычажного кривошипно-коромыслового механизма, содержащего ведущее звено - кривошип 1 и ведомое звено - коромысло 3, которые шарнирно соединены с шатуном 2 и основанием 4, и передаточного зубчатого механизма для передачи вращения от кривошипа 1 на ведомый вал (на фиг.1 не показан), расположенный соосно с шарниром O2, соединяющим коромысло 3 с основанием 4. Передаточный зубчатый механизм выполнен в виде зацепляющихся между собой некруглых зубчатых колес, попарно смонтированных на звеньях рычажного механизма с возможностью углового поворота и последующей фиксации под углами установки θ1 и θ2 в крайнем правом положении рычажного механизма (фиг.1).
На фиг.1 представлена схема выполнения регулируемого зубчато-рычажного механизма, где оси вращения первой пары эллиптических зубчатых колес 5 и 6 совмещены с их полюсом F1 и соответственно с шарнирами А и В шатуна 3, а оси вращения второй пары эллиптических зубчатых колес 7 и 8 совмещены с их полюсом F1 и соответственно с шарнирами В и О2 коромысла 3. При этом ведущее эллиптическое колесо 5 первой пары закреплено на кривошипе 1 с возможностью углового поворота и последующей фиксации на нем под углом установки θ1; ведущее эллиптическое колесо 8 второй пары сблокировано с ведомым колесом 6 с возможностью углового разворота между собой и последующей фиксации на нем под углом установки θ2. Ведомое эллиптическое колесо 8 второй пары закреплено на ведомом валу механизма (на фиг.1 не показан).
На фиг.2 представлена схема выполнения регулируемого зубчато-рычажного механизма, где оси вращения некруглых зубчатых колес 9, 10 и 11, 12 одновременно совмещены с центрами их симметрии и с шарнирами А, В и O2 рычажного механизма, а сами некруглые колеса 9, 10, 11 и 12 выполнены овальными.
На фиг.3 представлена схема выполнения регулируемого зубчато-рычажного механизма, где передаточный зубчатый механизм выполнен в виде последовательно установленных в зацеплении пары шарнирно установленных на шатуне 2 эллиптических колес 5 и 6, оси вращения которых совмещены с полюсом эллипса F1 и пары шарнирно установленных на коромысле 3 овальных зубчатых колес 11 и 12, оси вращения которых В и O2 совмещены с центрами их симметрии.
На фиг.4 представлена схема выполнения регулируемого зубчато-рычажного механизма, где передаточный зубчатый механизм выполнен в виде последовательно в зацеплении пары шарнирно установленных на шатуне некруглых зубчатых колес 5 и 6 и пары шарнирно установленных на коромысле 3 круглых зубчатых колес 13 и 14.
Предлагаемое устройство, осуществляющее способ регулирования угла выстоя зубчато-рычажного механизма, работает следующим образом.
При вращении ведущего звена механизма - кривошипа 1 с закрепленным на нем зубчатым колесом 5 угловая скорость ведомого колеса 8 передаточного зубчатого механизма (и соответственно закрепленного на колесе 8 ведомого вала) будет определяться суммированием на ведомом валу переносной скорости вращения ведомого колеса 8 (вместе с коромыслом 3) и относительной скорости вращения ведомого колеса 8 (относительно коромысла 3). Выполнение передаточного зубчатого механизма с некруглыми зубчатыми колесами обеспечивает (за счет изменения в процессе углового поворота ведущего кривошипа 1 радиусов начальных окружностей пар зацепляющихся колес rw1 и ww2, а также за счет изменения углов их установки θ1 и θ2 на звеньях рычажного механизма) регулирование составляющей скорости вращения ведомого колеса 8 относительно коромысла 3, что создает дополнительные кинематические возможности регулирования и увеличения угла выстоя зубчато-рычажного механизма (фиг.5, 6 и 7).
Достигаемый в предлагаемом способе и осуществляющем его механизме положительный эффект заключается в следующем:
1. Расширяются кинематические возможности способа и регулируемого зубчато-рычажного механизма за счет дополнительного изменения и увеличения угла выстоя за счет использования дополнительных регулирующих параметров в виде переменных при повороте ведущего кривошипа радиусов начальных окружностей пар зубчатых колес и изменяемых углов установки некруглых зубчатых колес относительно звеньев рычажного механизма. Отметим, что отсутствие указанных регулирующих параметров (rw1, rw2, θ1, θ2) в известных зубчато-рычажных механизмах и обуславливает недостатки их регулирования.
2. Регулирование угла выстоя за счет указанных регулирующих параметров:
а) не приводит к изменению частоты остановок ведомого вала и потому сохраняется заданный технологический цикл работы зубчато-рычажного механизма;
б) упрощается конструкция зубчато-рычажного механизма за счет выполнения цельными всех звеньев рычажного механизма (кривошип, шатун, коромысло, стойка);
в) в процессе регулирования за счет изменения углов установки θ1 и θ2 сохраняется динамическая уравновешенность рычажного механизма (в отличие от способа регулирования длины кривошипа);
г) изменение параметров некруглых зубчатых колес при неизмененных длинах звеньев рычажного механизма позволяет сохранить в процессе регулирования угла выстоя как кинематическую, так и оптимальную силовую работоспособность и передавать мощность на ведомый вал при минимальных углах давления без опасности заклинивания рычажного механизма.
Источники информации
1. Озол О.Г. Теория механизмов и машин. - М.: Изд-во «Наука», 1984. - С.138, рис.7.16. - аналог способа.
2. SU 894277, F 16 H 21/14, 1981 - аналог способа.
3. SU 1566134, F 16 H 27/04, 1990 - прототип способа.
4. Озол О.Г. Теория механизмов и машин. - М.: Изд-во «Наука», 1984. - С.139, рис.7.17. - аналог устройства.
5. SU 1599606, F 16 H 21/14, 1990 - прототип устройства.
| название | год | авторы | номер документа |
|---|---|---|---|
| РЕГУЛИРУЕМЫЙ ЗУБЧАТО-РЫЧАЖНЫЙ ПРИВОД ПЕРИОДИЧЕСКОГО ДВИЖЕНИЯ | 2010 |
|
RU2440526C1 |
| РЫЧАЖНЫЙ МЕХАНИЗМ В.И. ПОЖБЕЛКО С ТОЧНЫМ ДЛИТЕЛЬНЫМ ВЫСТОЕМ | 2023 |
|
RU2836248C1 |
| КРИВОШИПНЫЙ МЕХАНИЗМ В.И. ПОЖБЕЛКО С ТОЧНЫМИ ОСТАНОВКАМИ | 2005 |
|
RU2283446C1 |
| ТРАНСФОРМАТОР ВРАЩАЮЩЕГО МОМЕНТА ШАШКИНА | 1992 |
|
RU2073804C1 |
| СПОСОБ И МЕХАНИЗМ В.И. ПОЖБЕЛКО ДЛЯ ВОСПРОИЗВЕДЕНИЯ ВРАЩЕНИЯ С ОСТАНОВКАМИ | 2003 |
|
RU2249133C1 |
| Зубчато-рычажное устройство | 1982 |
|
SU1087723A1 |
| Манипулятор для передачи изделий | 2023 |
|
RU2822908C1 |
| ШАРНИРНЫЙ ВИБРОУДАРНЫЙ МЕХАНИЗМ | 2022 |
|
RU2783900C1 |
| Двухвалковое устройство для дробления | 1979 |
|
SU856544A1 |
| Кулачково-зубчато-рычажный механизм | 1982 |
|
SU1046556A1 |

Изобретение относится к области машиностроения и может найти применение в переналаживаемых автоматических линиях и в робототехнике, где требуются регулируемые остановки ведомого вала без разрыва кинематической цепи привода. Способ заключается в том, что в процессе углового поворота ведущего звена зубчато-рычажного механизма изменяют радиусы начальных окружностей входящих в зацепление пар некруглых зубчатых колес, передающих вращательное движение на ведомый вал, а также изменяют угол установки зубчатых колес относительно звеньев рычажного механизма. Устройство, реализующее способ регулирования угла выстоя зубчато-рычажного механизма, выполнено в виде зубчато-рычажного механизма, включающего совокупность кривошипно-коромыслового и зубчатого передаточного механизмов. Последний выполнен в виде зацепляющихся между собой некруглых, например эллиптических, зубчатых колес, попарно смонтированных на звеньях рычажного кривошипно-коромыслового механизма с возможностью углового поворота и последующей фиксации. Технический результат заключается в расширении кинематических возможностей способа и зубчато-рычажного механизма за счет дополнительного регулирования и увеличения угла выстоя при сохранении динамической уравновешенности зубчато-рычажного механизма в процессе регулирования и минимальных углов давления, а также упрощении его конструкции. 2 н. и 7 з.п. ф-лы, 7 ил.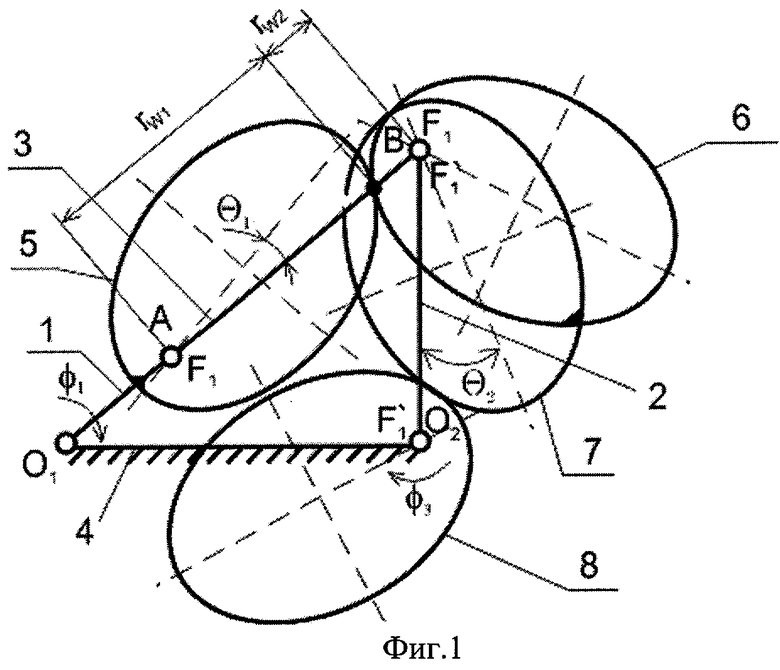
| Планетарная передача с выстоем | 1988 |
|
SU1566134A1 |
| АРТОБОЛЕВСКИЙ И.И | |||
| Механизмы в современной технике, т.3 | |||
| - М.: Наука, 1973, с.203 | |||
| Регулируемый зубчато-рычажный механизм | 1980 |
|
SU894277A1 |
| Зубчато-рычажный механизм с остановками | 1987 |
|
SU1599606A1 |
| Система автоматического управления периодическим процессом культивирования микроорганизмов | 1984 |
|
SU1227664A1 |

