4
Ј
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ ОБУЧЕНИЯ ВОДИТЕЛЕЙ ГУСЕНИЧНЫХ МАШИН | 1997 |
|
RU2113016C1 |
| БОРТОВОЙ ТРЕНАЖЕР ВОЖДЕНИЯ ГУСЕНИЧНОЙ МАШИНЫ | 2010 |
|
RU2433483C1 |
| УСТРОЙСТВО ДЛЯ ОЦЕНКИ ПЛАВНОСТИ ХОДА ГУСЕНИЧНЫХ МАШИН ПРИ ОБУЧЕНИИ ВОЖДЕНИЮ | 1997 |
|
RU2113015C1 |
| Устройство для оценки мастерства вождения транспортных средств | 1989 |
|
SU1622889A1 |
| Устройство для оценки работы операторов | 1988 |
|
SU1547018A1 |
| Тренажер операторов автоматизированных систем управления | 1981 |
|
SU991482A1 |
| Устройство для психофизиологических исследований оператора | 1990 |
|
SU1751794A1 |
| УСТРОЙСТВО ДЛЯ ОЦЕНКИ МАСТЕРСТВА ВОЖДЕНИЯ ОПЕРАТОРА БРОНИРОВАННОЙ ГУСЕНИЧНОЙ МАШИНЫ | 1997 |
|
RU2123724C1 |
| УСТРОЙСТВО ДЛЯ КОНТРОЛЯ И РЕГИСТРАЦИИ ЭКСПЛУАТАЦИОННЫХ ПОКАЗАТЕЛЕЙ АВТОТРАНСПОРТНОГО СРЕДСТВА | 2000 |
|
RU2178585C1 |
| ТРЕНАЖЕР ДЛЯ ОБУЧЕНИЯ МЕХАНИКА-ВОДИТЕЛЯ ГУСЕНИЧНОЙ МАШИНЫ | 2016 |
|
RU2661176C2 |
Изобретение относится к тренажерам транспортных средств и может быть использовано при обучении и контроле деятельности операторов-водителей. Цель изобретения - повышение точности оценки. Устройство содержит блок 1 задания маршрута, пульт 2 руководителя обучения, рабочее место 3 обучаемого, блок 4 динамики движения, блок 5 объективной оценки, блок и 6, 12 информации, задатчик и 7,8 параметров, блоки 9-11 регистрации параметров, блок 13 контроля текущей напряженности обучаемого, таймер 14 и блок 15 индикации оценки. При работе тренажера обеспечивается оценка точности управления транспортным средством, а также определения психофизиологических затрат водителя. 1 з.п. ф-лы, 8 ил.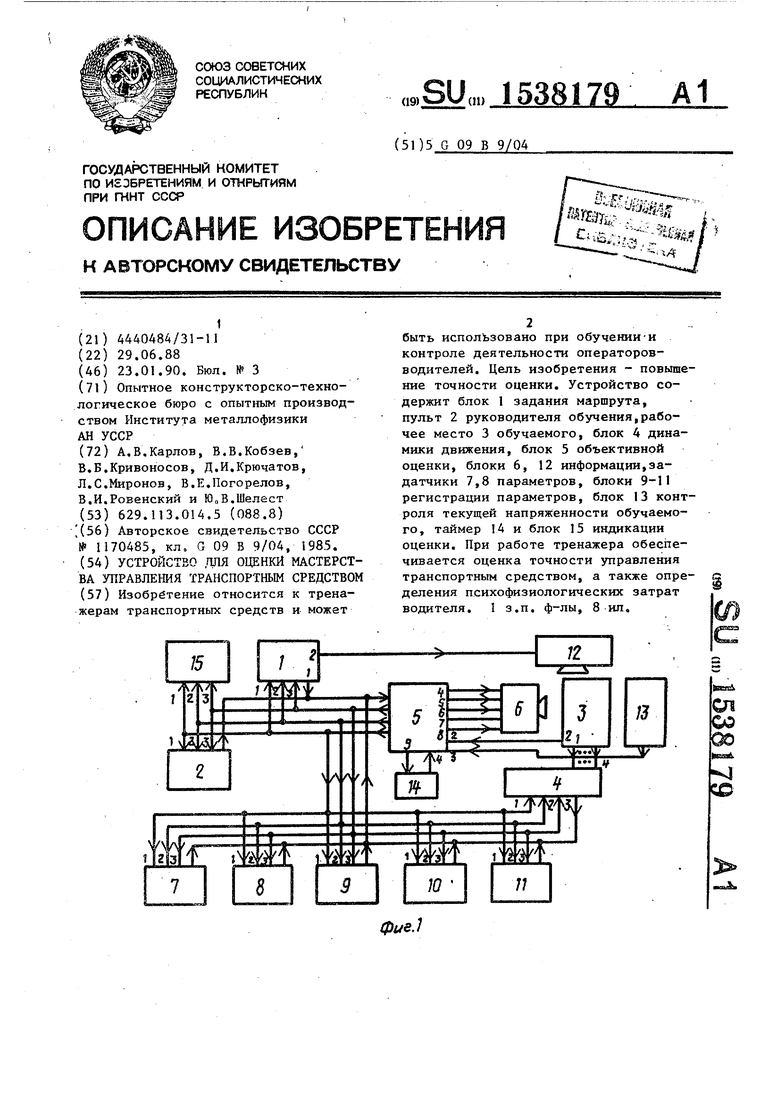
фие.1
Изобретение относится к области тренажеров транспортных средств и может быть использовано при обучении и контроле деятельности онерэ-- торов-водителей„
Целью изобретения ягляется повышение точности оценкиu
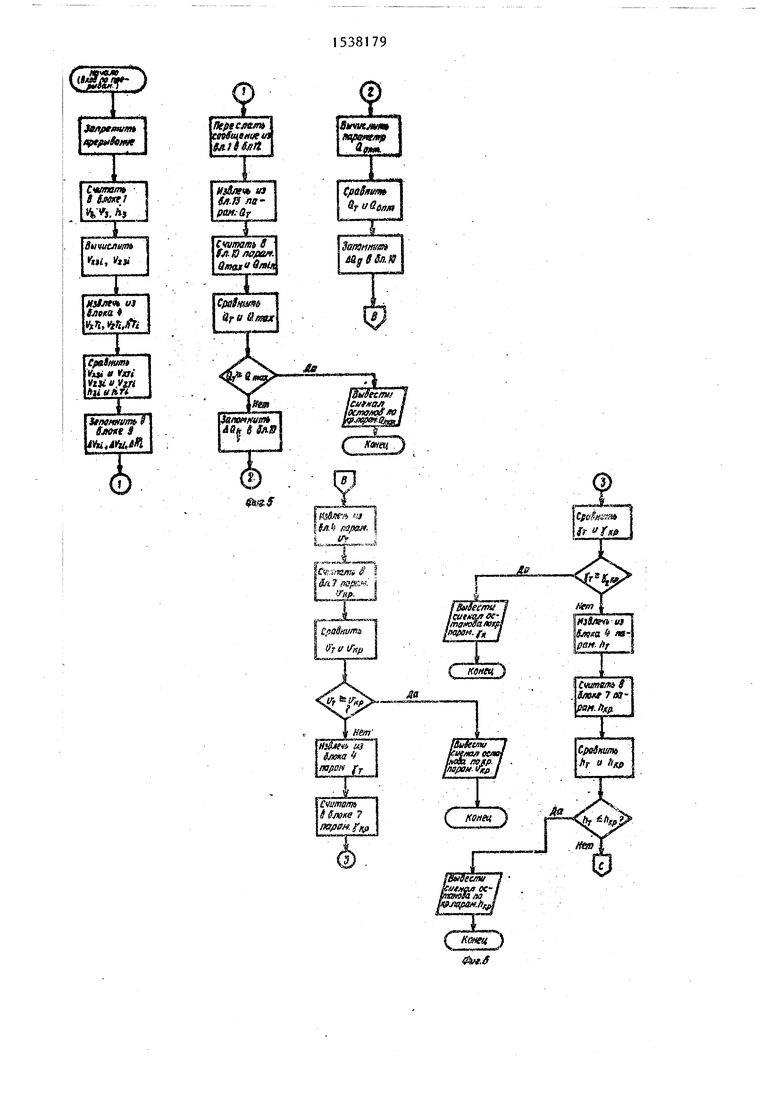
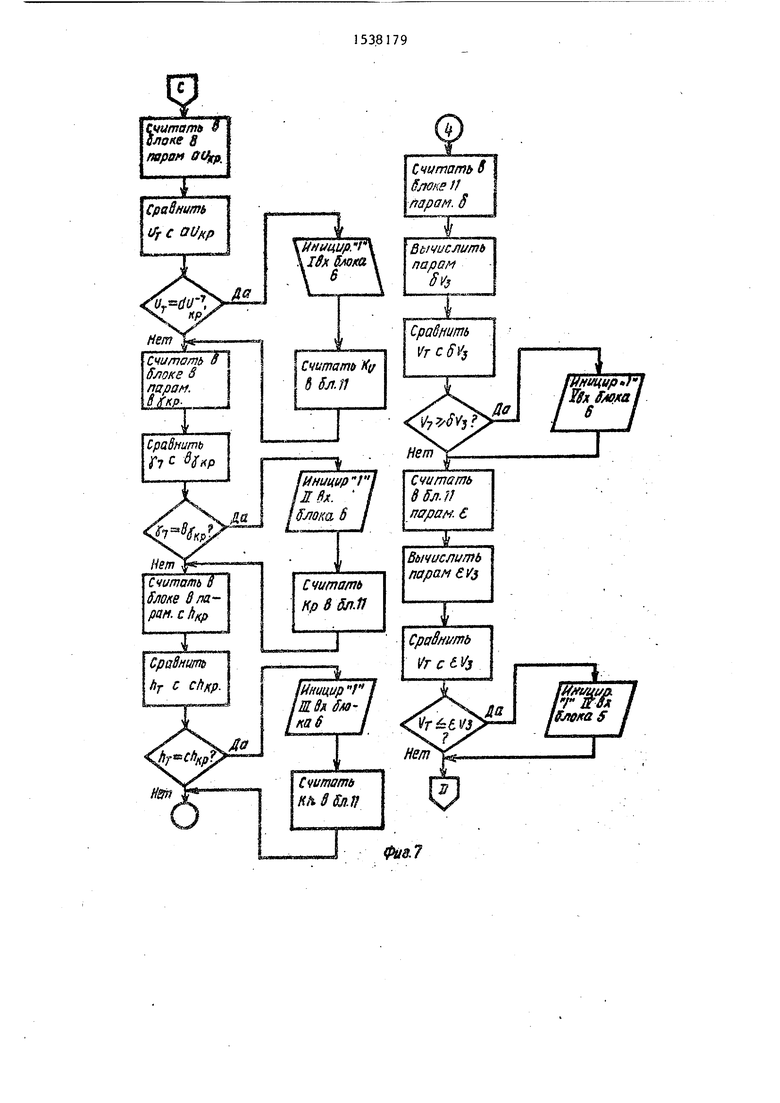
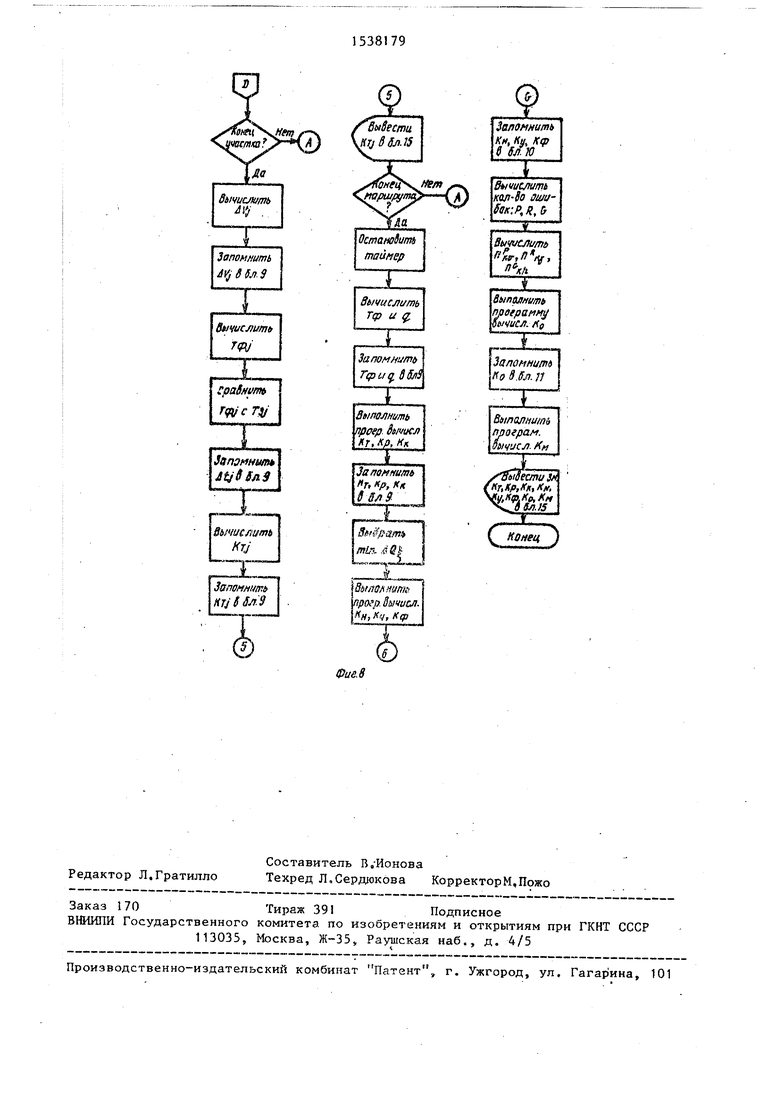
На фиг,1 представлена струстурно- функциональная схема ус тройстваj на фиг.2 - принципиальная электрическая схема блока задания маршрута; на фиг с 3 принципиальная электрическая cxeva блока контроля текущей напряженности обучаемого; иг фиг. 4 - алгоритм программы запуска устройства; на фиг„ 5 - фрагмент «лгоритиа формирования составляющих, оценки качества действий и оценки психофизиологи™ ческого состояния обучаемого; на фиг 6 - фрагмент алгоритма формирования сигналов останова выполнения задания по критическому параметру; на фиг. 7 фрагмент алгоритма формирования составляющих опенки ошибочных действий обучаемого и сигналов подсказки; на фиг, 8 - фрагмент алгоритма вычисления и вывоца частных оценок и общей оценки мастерства обулаемого„
УСТРОЙСТВО ДЛЯ OI М
ггравпет я ттэачслорт: ii с.р -нс УВОМ
(ЙИГ.ОСОДерЖ в МК 1 LIcbJcPHrW
маршрута, пульт 2 доао д.н епя эб чения (ПРО) э рабо ее е. то мого (PMO)S блоя i цилшгкх движения, блок 5 объективно 1 OH-,.,, и, тервъгй блок 6 информации, первый 7 критических iiapAMe i pon, агорой за датчик 8 параметров ошибочных действий, первый бгглс 9 pei исчг ации параметров качества действий обучаемого s второй блок iO регистрации метров психофизиологического состояния обучаемого, гретлй блок I регистрации параметров ошибочных действий, второй блок 2 информации,, блок J 3 контроля текущей напргканпОсти,таймер , блок 15 лнди.сгции, при первые, вторые ч третьи входы соответственно блока 1 ггдаяия мапшгу а, ПРО 2, олока 4 динамы. i движения,первого 9аца1чик: 7 параметров гторс о задатчика 8 параме рсь, псрпсго бло-- ка 9 регистрации пэргиетров, второго блока 10 регистрчци чараметроу третьего блокс 1I регистрации п«та метров9 блока 15 индикации соединены г -твегстзепьо с 1Гирвыи, вторым
0
0
5
0
5
О
5
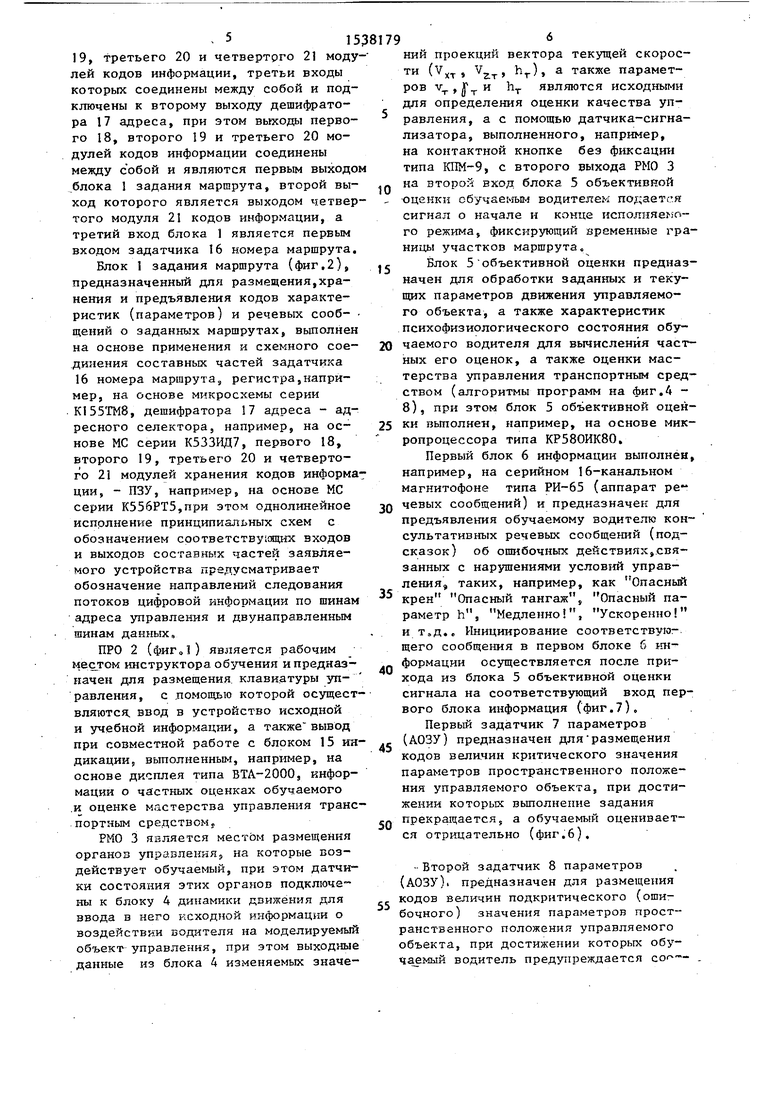
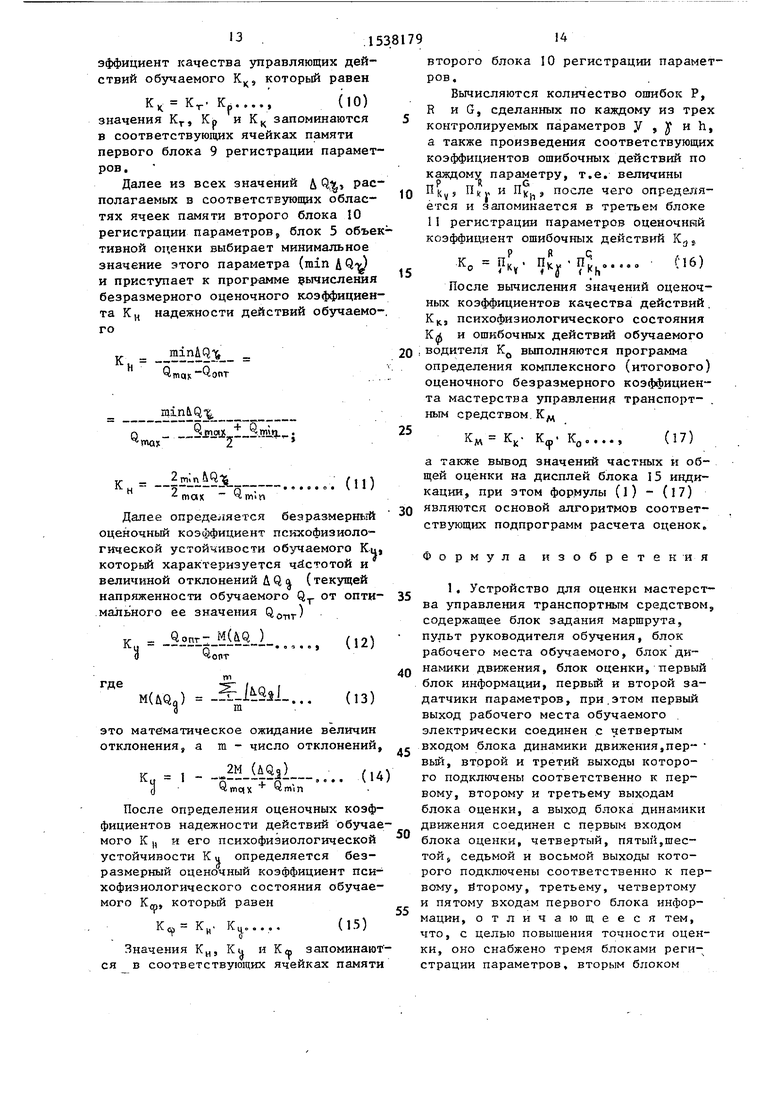
и третьим выходами блока 5 объективной оценки, первый вход которого подключен к выходам соответственно ПРО 2, блока 4 динамики движения,, первого задатчика 7 параметров,второго задатчика 8 параметров,первого блока 9 регистрации параметров,второго блока 10 регистрации параметров, третьего блока 11 регистрации параметров , а также подключен к первому выходу блока 1 задания маршрута,второй выход которого соединен с входом второго блока 12 информации, а первый, второй и третий, четвертый и пятый входы первого блока б информации подключены соответственно к четвертому, пятомуs 1аестому5 седьмому к восьмому выходам опока 3 объективной оценки, и-юрий вход которого соединен с вторым 8,.ходсж РМО 3, первый выход которого по;, ключе - к четвертому входу блока 4 дина нки движения, а девятый выход Опока 5 объективной оценки соединен с BXODOM таймера 14, выход которого подключен к четвертому входу 5 объективной оцеь- кч, третич вход которого соединен с выходом блока 13 контроля текущей чгпряженности, а блок 1 марш- (фиг.2) содержит задатчик 16 чомера маршрута, дешифратор 17 адре- .if первый модуль 18 кодов информации с чадашгэпс скоростях выбранного маршрута э второр модуль 19 кодов информации о заданных курсовых углах выбранного маршрута, третий модуль 20 кодов информации о заданных скоростях вертикального перемещения на участках выбранного маршрута, четвертый модуль 21 кодов информации об инициировании во втором блоке 12 информации речевых сообщений, соответствующих изменениям характеристик выбранного марш- рута (скорости, курсового углаэскорости вертикального перемещения)э при этом первые входы соответственно первого 185 второго 19, третьего 20Э четвертого 21 модулей кодов информации соединены между собой и подключены к первому входу деиифратора 17 адреса, хоторЕЙ является первым входом блока задания маршрута, второй вход которого является вторым входом дешифратора 17 адреса, первый выход которого подключен к второму входу задатччка 16 номера мершрута, выход которого соединен с вторыми входами соответственно первого 18S второго
19, третьего 20 и четвертрго 21 моду лей кодов информации, третьи входы которых соединены между собой и подключены к второму выходу дешифратора 17 адреса, при этом выходы первого 18, второго 19 и третьего 20 модулей кодов информации соединены между собой и являются первым выходо „блока 1 задания маршрута, второй выход которого является выходом четвертого модуля 21 кодов информации, а третий вход блока 1 является первым входом задатчика 16 номера маршрута.
Блок 1 задания маршрута (фиг,2), предназначенный для размещения,хранения и предъявления кодов характеристик (параметров) и речевых сооб- щений о заданных маршрутах, выполнен на основе применения и схемного соединения составных частей задатчика 16 номера маршрута, регистра,например, на основе микросхемы серии К155ТМ8, дешифратора 17 адреса - адресного селектора, например, на основе МС серии К533ИД7, первого 18, второго 19, третьего 20 и четвертого 21 модулей хранения кодов информации, - ПЗУ, например, на основе МС серии К556РТ5,при этом однолинейное исполнение принципиальных схем с обозначением соответствующих входов и выходов составных частей заявляемого устройства предусматривает обозначение направлений следования потоков цифровой информации по шинам адреса управления и двунаправленным шинам данных,
ПРО 2 (фиг) является рабочим местом инструктора обучения и предназначен для размещения клавиатуры управления, с домощыо которой осуществляются ввод в устройство исходной и учебной информации, а также вывод при совместной работе с блоком 15 индикации, выполненным, например, на основе дисплея типа ВТА-2000, информации о частных оценках обучаемого .и оценке мастерства управления транспортным средством,
РМО 3 является местом размещения органов управленияs на которые воздействует обучаемый, при этом датчики состояния этих органов подключе™ вы к блоку 4 динамики движения для ввода в него исходной информации о воздействии водителя на моделируемый объект управления, при этом выходные данные из блока 4 изменяемых значе-
0
5
0
5
0
5
0
5
0
5
ний проекций вектора текущей скорости (VXT, VZT, hr), а также параметров vT,rTH hT являются исходными для определения оценки качества управления, а с помощью датчика-сигнализатора, выполненного, например, на контактной кнопке без фиксации типа КПМ-9, с второго выхода РМО 3 на второй вход блока 5 объективной оценки обучаемым водителем подается сигнал о начале и конце исполняемого режима, фиксирующий временные границы участков маршрута.
Блок 5 объективной оценки предназначен для обработки заданных и текущих параметров движения управляемого объекта, а также характеристик психофизиологического состояния обучаемого водителя для вычисления частных его оценок, а также оценки мастерства управления транспортным средством (алгоритмы программ на фиг.4 - 8), при этом блок 5 объективной оценки выполнен, например, на основе микропроцессора типа КР580ИК80.
Первый блок 6 информации выполнен, например, на серийном 16-канальном магнитофоне типа РИ-65 (аппарат ре чевых сообщений) и предназначен для предъявления обучаемому водителю консультативных речевых сообщений (подсказок) об ошибочных действиях,связанных с нарушениями условий управления, таких, например, как Опасный крен Опасный тангаж, Опасный параметр h, Медленно, Ускоренно и ТзД.. Инициирование соответствующего сообщения в первом блоке б информации осуществляется после прихода из блока 5 объективной оценки сигнала на соответствующий вход первого блока информация (фиг.7)0
Первый задатчик 7 параметров (АОЗУ) предназначен для размещения кодов величин критического значения параметров пространственного положения управляемого объекта, при достижении которых выполнение задания прекращается, а обучаемый оценивается отрицательно (фиг.б),
- Второй задатчик 8 параметров (АОЗУ). предназначен для размещения кодов величин подкритического (ошибочного) значения параметров пространственного положения управляемого объекта, при достижении которых обучаемый водитель предупреждается со .
11538
ветствующим речевым сообщением (фиг.7).
Первый блок 9 регистрации параметров (АОЗУ) предназначен для оперативного размещения харакгеристиь и частных оценок качества дайствчй обучаемого водителя„
Второй блок 10 регистрации параметров (АОЗУ) предназначен дли one- рат.ччного размещения характеристик психофизиологического состояния обучаемого водителя, и. гакже граничных значении зоны его оптчмллышй напряженности (Qmc(Jt и Qft);r1), при дости- жении максимального значения которой (Q ma ) выполнение задания прекращается, а обучаемый оценивается отрицательно (фиг,5),
Третий блок } регистрации пара- метров (АОЗУ) предназначен для размещения кодов величин составляющих ко- эффцнента ошибочных действий (Кх,9Куэ КЧЛ , Ј ,njv, пЦр ГТ), а такжеJ сформированного из них коэффициента ошибочных действий К 0« Первый 7 и второй 8 зэдатчяки параметре:,, первый 9, второй 10 и третий 11 блоки регистрации параметров выполнены чо сспо- ве- аккумулятор.ого оперативного . i поминающего остройс сз- ЛОЗУ для обеспечение дзунг-праъ-г:Ј. ,1-ч информацией и усп опчивост ; п параметров ар к гсратковраме к г. отключении питающей эдр -стросетт . мененкч к МС, например сг;рки TO37Pirj.
Второй блок 12 птр-пмаиш- матический штуомаг. предназначь для обеспечения обучаемого зодигплг речевой информацией о харакгаое зп- данного маршг-ута, при этом указанная информация инициируется синхронно с изменением параметров заданного марш рута по сигналу, поступающему с выхода четвертого ходуля 2 ;:одов икфор- ма; ик, через второй вь ход блока 1 задания маошру « зта ВУОД второго блока 12 информации; второй блок иншор- ма-иги по примеру 1пфо|:мацион1П,1х устройств,, применяе -5ых us городское транспорте,- мол2т бытъ выпоггтген на основе серийного диктсфонг, напки- мер, марки ДОН,
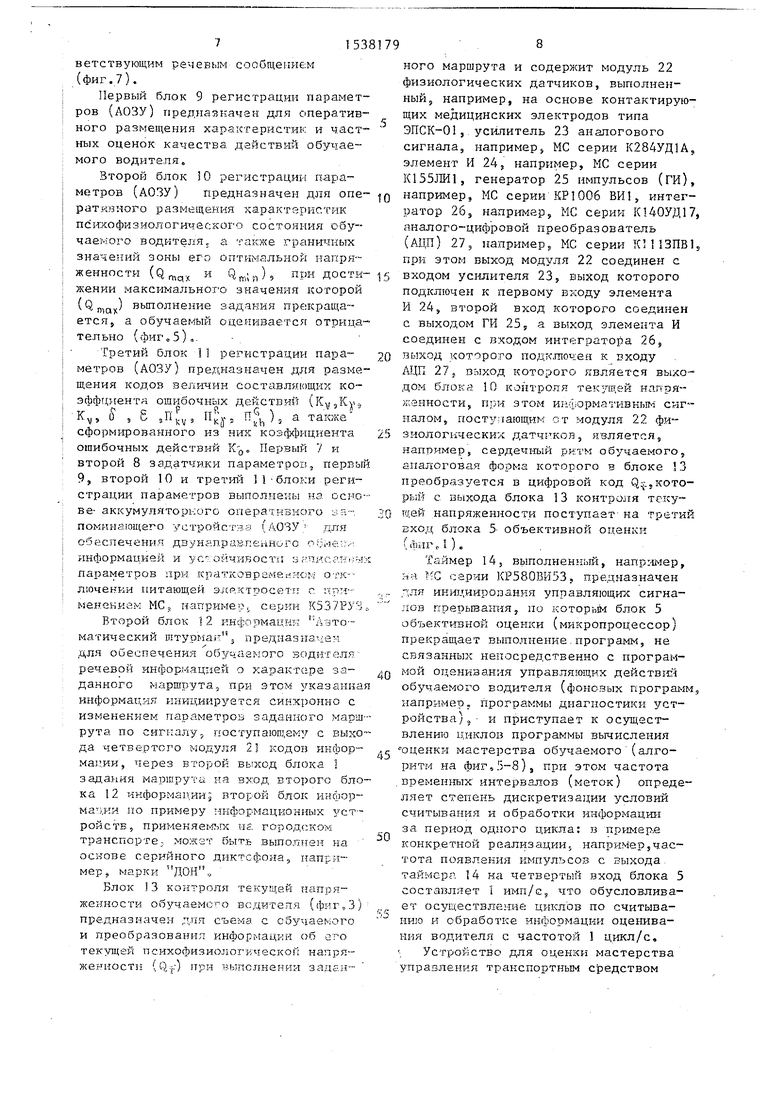
Блок 13 контроля тетсуией напая- женности обучаемого (фгт,. 3; предназначен дня съема с обучаемого и преобразование инфоргчадки об психофизиологической напряженности (Q.) при рыпслчепии задгл
79
Q
Q 5 }
Q r
0
8
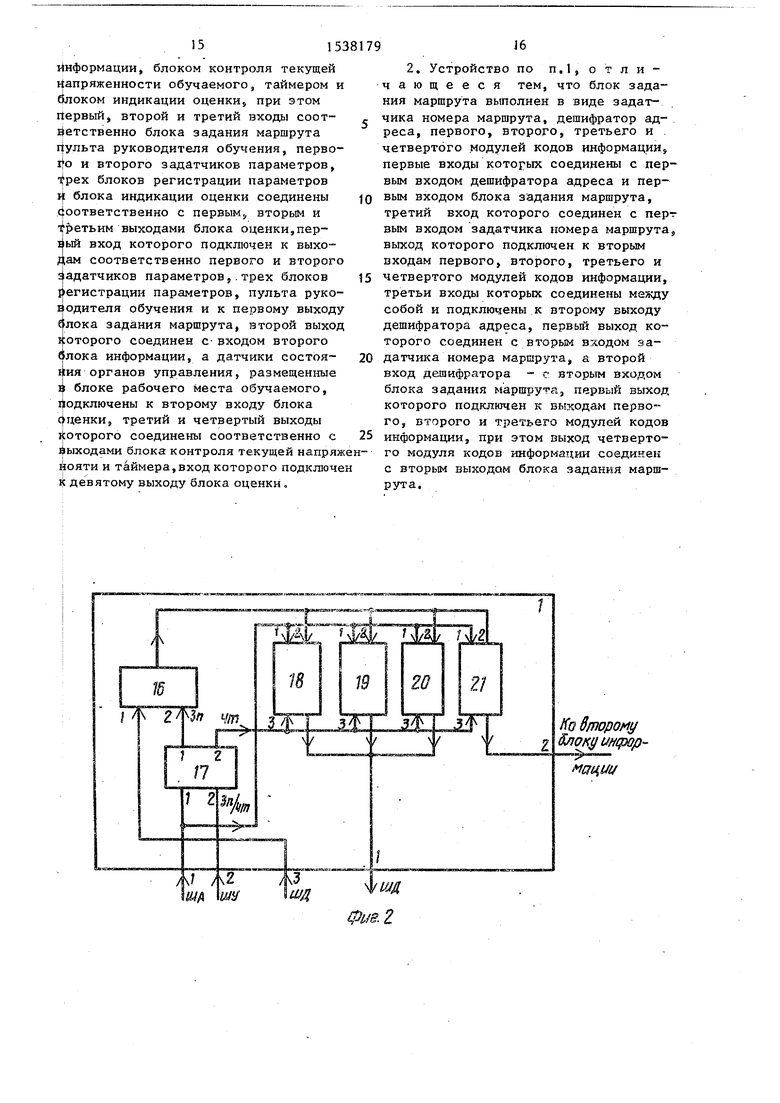
ного маршрута и содержит модуль 22 физиологических датчиков, выполненный, например, на основе контактирующих медицинских электродов типа ЭПСК-01, усилитель 23 аналогового сигнала, например МС серии К284УД1А, элемент И 24, например, МС серии К155ЛИ1, генератор 25 импульсов (ГИ), например, МС серии КРЮ06 ВИ1, интег- оатор 265 например, МС серии К140УД17, аналого-цифровой преобразователь (АЦП) 27, например, МС серии КП 13ПВ15 при этом выход модуля 22 соединен с входом усилителя 23, выход которого подключен к первому п;;оду элемента И 24, второй вход которого соединен с выходом ГИ 25, л выход элемента И соединен с в кодом интегратора 26, чыход которого подключен к входу АЦП 27, выход которого является выходом блоьа 10 контроля текущей нллря- я-зннооти, п;.и этом информативным сигналом, посту 1ающи - .т модуля 22 физиологических датчиков, язляется, наппчмер, сердечный ритм обучаемого, аналоговая форма которого в блоке 3 преобразуется в цифровой код Q sкоторый с выхода блока 13 контроля текущей напряженности поступает на третий еход блока 5 объективной оценки
1ТнН% 1 ) .
Таймер 14, выполненной, например, .fi f C огрчи КР580ВИ53, предназначен -,.1я инициирования управляющих сигна- лов греоьгеапия, по которым блок 5 объективной оценки (микропроцессор) прекращает выполнение программ, не связанных непосредственно с программой оценивания управляющих действий обучаемого водителя (фоновых программ, напримео. программы диагностики устройства), и приступает к осуществлению ииклов программы вычисления оценки мастерства обучаемого (алгоритм на фиг,5-8), при этом частота временных интервалов (меток) определяет степень дискретизации условий считывания и обработки информации за период одного цикла: в примере конкретной реализации; напрямер5чэс- тота появления импульсов с выхода таймер 14 на четвертый вход блока 5 составляет 1 имп/с, что обусловливает осуществление циклов по считыванию и обработке информации оценивания водителя с частотой 1 цикл/с.
Устройство для оценки мастерства управления транспортным средством
91538179
функционирует следующим образом (фиг. 1, 4-8),
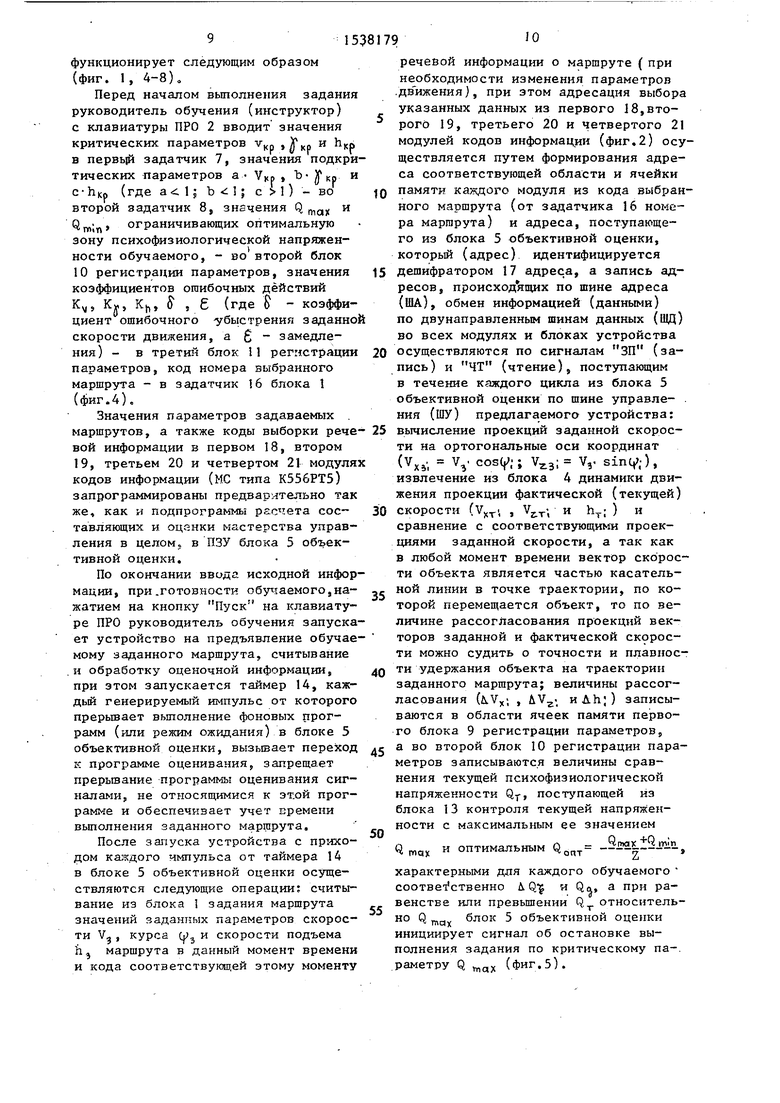
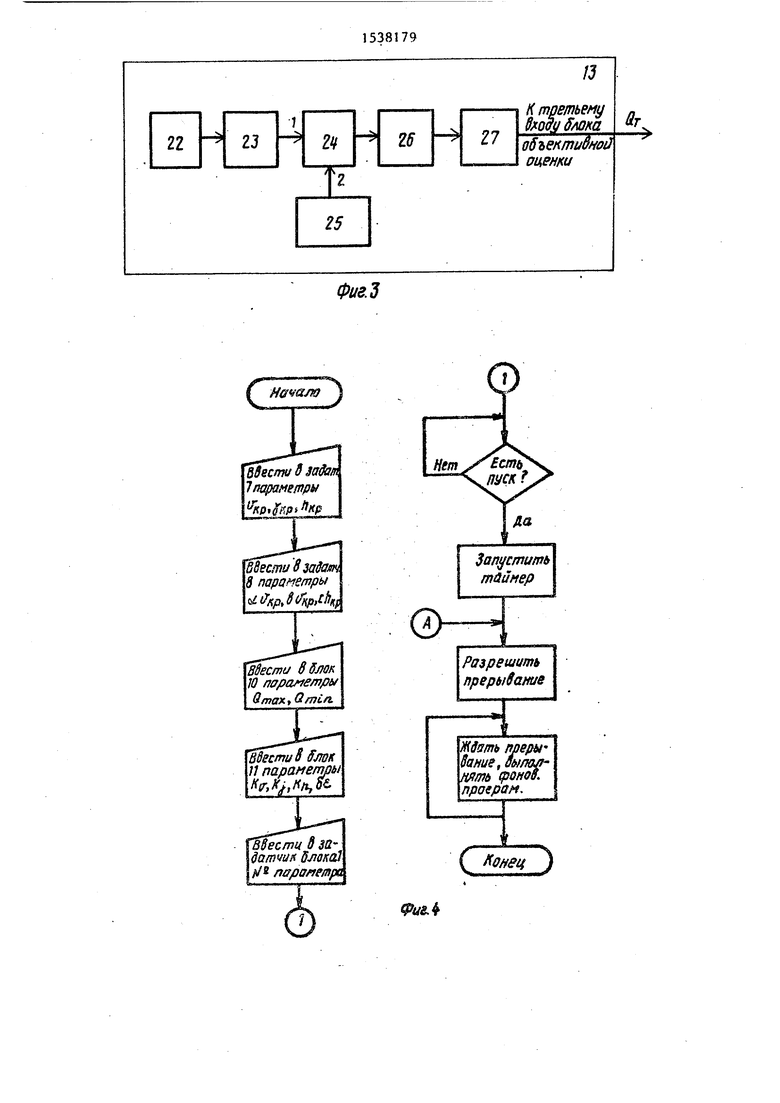
Перед началом выполнения задания руководитель обучения (инструктор) с клавиатуры ПРО 2 вводит значения критических параметров vKp ,ХчКр и hKp в первь(й задатчик 7, значения подкри- тических параметров а УИв Ъ- ук« и c-hKp (где а 1; Ъ ; ) - во второй задатчик 8, знзчения Q max и Qro;n, ограничивающих оптимальную зону психофизиологической напряженности обучаемого, - во второй блок 10 регистрации параметров, значения коэффициентов ошибочных действий
Kh, 8 , Ј (где & - коэффи10
речевой информации о маршруте ( при необходимости изменения параметров дв ижения), при этом адресация выбора указанных данных из первого 18,второго 19, третьего 20 и четвертого 21 модулей кодов информации (фиг.2) осу ществляется путем формирования адреса соответствующей области и ячейки
JQ памяти каждого модуля из кода выбран ного маршрута (от задатчика 16 номера маршрута) и адреса, поступающего из блока 5 объективной оценки, который (адрес) идентифицируется
15 дешифратором 17 адреса, а запись адресов, происходящих по шине адреса (ША), обмен информацией (данными) по двунаправленным шинам данных (ШД) во всех модулях и блоках устройства осуществляются по сигналам ЗП (запись) и ЧТ (чтение), поступающим в течение каждого цикла из блока 5 объективной оценки по шине управления (ШУ) предлагаемого устройства:
20
Кч, Ку, IXj,, и ,
циент ошибочного убыстрения заданной скорости движения, а Ј замедления) - в третий блок И регистрации параметров, код номера выбранного маршрута - в задатчик 16 блока 1 (фиг.4).
Значения параметров задаваемых маршрутов, а также коды выборки рече- 25 вычисление проекций заданной скорос- вой информации в первом 18, втором ти на ортогональные оси координат
(VX5., VV cosy;; V,- ), извлечение из блока 4 динамики движения проекции фактической (текущей) 30 скорости (VXT , ,
19, третьем 20 и четвертом 21 модулях кодов информации (МС типа К556РТ5) запрограммированы предварительно так же, как и подпрограммы расчета составляющих и оцанки мастерства управления в целом, в ПЗУ блока 5 объективной оценки.
По окончании ввода исходной информации, при .готовности обучаемого,нажатием на кнопку на клавиатуре ПРО руководитель обучения запускает устройство на предъявление обучаемому заданного маршрута, считывание и обработку оценочной информации, при этом запускается таймер 14, каждый генерируемый импульс от которого прерывает выполнение фоновых программ (или режим ожидания) в блоке 5 объективной оценки, вызывает переход к программе оценивания, запрещает прерывание программы оценивания сигналами, не относящимися к эт.ой программе и обеспечивает учет времени выполнения заданного маршрута.
После запуска устройства с приходом каждого импульса от таймера 14 в блоке 5 объективной оценки осуществляются следующие операции; считывание из блока 1 задания маршрута значений заданных параметров скорости V, курса уз и скорости подъема hъ маршрута в данный момент времени и кода соответствующей этому моменту
г.т
и
hT;)
и
40
сравнение с соответствующими проекциями заданной скорости, а так как в любой момент времени вектор скорости объекта является частью касатель,. ной линии в точке траектории, по которой перемещается объект, то по величине рассогласования проекций векторов заданной и фактической скорости можно судить о точности и плавности удержания объекта на траектории заданного маршрута; величины рассогласования (kV,(; , &V и Ah;) записываются в области ячеек памяти первого блока 9 регистрации параметров,
дс а во второй блок 10 регистрации параметров записываются величины сравнения текущей психофизиологической напряженности Q-,-, поступающей из блока 13 контроля текущей напряженности с максимальным ее значением
50о +о
Qmax и оптимальным QQ(TT J JML|- IffiS.,
характерными для каждого обучаемого соответственно ЛQf и 0, а при равенстве или превышении QT относительно Q гоа блок 5 объективной оценки инициирует сигнал об остановке выполнения задания по критическому параметру Q „ (фиг. 5).
10
речевой информации о маршруте ( при необходимости изменения параметров дв ижения), при этом адресация выбора указанных данных из первого 18,второго 19, третьего 20 и четвертого 21 модулей кодов информации (фиг.2) осуществляется путем формирования адреса соответствующей области и ячейки
Q памяти каждого модуля из кода выбранного маршрута (от задатчика 16 номера маршрута) и адреса, поступающего из блока 5 объективной оценки, который (адрес) идентифицируется
5 дешифратором 17 адреса, а запись адресов, происходящих по шине адреса (ША), обмен информацией (данными) по двунаправленным шинам данных (ШД) во всех модулях и блоках устройства осуществляются по сигналам ЗП (запись) и ЧТ (чтение), поступающим в течение каждого цикла из блока 5 объективной оценки по шине управления (ШУ) предлагаемого устройства:
0
5 вычисление проекций заданной скорос- ти на ортогональные оси координат
V,- ) ка 4 динамики ктической (теку
г.т
и
hT;)
и
0
сравнение с соответствующими проекциями заданной скорости, а так как в любой момент времени вектор скорости объекта является частью касатель. ной линии в точке траектории, по которой перемещается объект, то по величине рассогласования проекций векторов заданной и фактической скорости можно судить о точности и плавности удержания объекта на траектории заданного маршрута; величины рассогласования (kV,(; , &V и Ah;) записываются в области ячеек памяти первого блока 9 регистрации параметров,
с а во второй блок 10 регистрации параметров записываются величины сравнения текущей психофизиологической напряженности Q-,-, поступающей из блока 13 контроля текущей напряженности с максимальным ее значением
0о +о
Qmax и оптимальным QQ(TT J JML|- IffiS.,
характерными для каждого обучаемого соответственно ЛQf и 0, а при равенстве или превышении QT относительно Q гоа блок 5 объективной оценки инициирует сигнал об остановке выполнения задания по критическому параметру Q „ (фиг. 5).
Блок объективной оценки также осуществляет сравнение заданных критических параметров V,
У.
и Ь
КЙ 5 -i V
КР
размещаемых в первом задатчике / параметров, с соответствующими текущк- ми параметрами фактического пространственного положения управляемого объектаэ поступающими из блоке 4 динамики движения, и при равенстве либо превышении инициирует сигнал об остановке выполнения задания по достижению соответствующего критического параметра (фиг„6),
Блок объективной оценки осуществляет сравнение подкрэтических (ошибочных) параметров, формируемых из критических параметров путем перемножения на экспертные коэффициенты запаса (aVkp , и chKp)3 размещаемые во втором задатчике 8 параметров s с соответствующими текущими параметрами VT, ftr и hr и при достижении их равенства инициирует сигнал по соответствующему входу пер вого блока информацич о консультативной подсказкеj а из третьего блока регистрации параметров считывает величину коэффициента соответстяугс- щей ошибки (К;, ипи л, ,кли Учи- тывая npvi это: коли-гастео по,чо5-тъ1х ошибок з отношении сэилюде -я з ipri- кои скорости, 6jiOi ; 5 . бьект.зноь оценки сравшхГ .ет V г с е - мревь тлением ijv или заьижсяреи .оэ.л фициенты о i п Ј храпя тс: - в третьем блоке регистрацией г цэдметоз и при достижении колтрольяых зт ч--.-- ний инициирует сигнап на соответствующем входе первого блока информации о воспроизведении консультативной подсказки Медленно i-ши Ускоренно (фиг./).
Поспе выполнения любого законченного участка маршрут as ° ем опок 5 объективной оаенкч информируется итоговым сигналом из блока 1 задания режима 1 и инициативным сигналом Режим, поступающим от обучаемого с РМО 3, фиксирующик достиж нио гра- ниц информатизных участков маршрута, определяется модуль усредне-шого отклонения скорости на участке ЬV
&V: -J MuVyi MuVzj z 4.
где
«uV,
1
. ...... .... „ ,
о
|AVZ;I
„д
(3)
MAh -- JAbiL...
u j n
(4)
где (2) - (4) - математические ожидания отклонений проекций вектора текущей скорости от заданной на оцениваемом участке, и, зная заданную скорость на данной участке $ определяется безразмерный коэффициент точности и плавности управления на учЈ /;
стке
К
ri
0
5
5 0
К
- V3l - № L - , AVi ,,-г
т. . - , (5)
5J3j
на оцениваемом участке определяются также фактическое время достижения границы участка Тф{ к отклонение этого времени и с; от заданного Т3 ; параметры ut- ч К : фиксируются в первом блоке регистрации параметров Е при этом К Tj -выводится на экран блока 15 индикации (фиг-,8). HPF достижении конця заданного маршрута по сигналу Режим останавливается таймер 14 и фиксируются фактическое время выполнения задания Т ф и количество участков q при извлечении из первого блока регистрации параметров Кт;, &t; , вьтолня- отся программа вычисления безразмерных оценочных коэффициентов точности и плавности управляющих действий
Кт и ритмичности управления К0 Vг
К -±:ITL ra
(6)
Т3 -1-iitjl/Тэ-Т р/
Кр -
(7)
V
где
т,
(8)
характеризует регулярность движения, т„е, Кп тем выше, чем меньше отклонений dtj „ а
..
(9)
характеризует регламентность движения, т,е, чем точнее водитель приводит транспортное средство в конечный пункт маршрута,, тем выше К„.
После определения оценочных коэф- «фиционтоь точности Кт. и ритмичности Кg определяется безразмерный ко13
эффициент качества управляющих действий обучаемого Кк, который равен
К - К,
К
р
(ю)
значения Кт, К« и Кк запоминаются в соответствующих ячейках памяти первого блока 9 регистрации параметров.
Далее из всех значений Д Q, располагаемых в соответствующих областях ячеек памяти второго блока 10 регистрации параметров, блок 5 объективной оценки выбирает минимальное значение этого параметра (rain Д Q и приступает к программе вычисления безразмерного оценочного коэффициента Кн надежности действий обучаемого
КН
Q
minAQifc Qmait QonT
minbQi
-§;--ma
SjnsuL -S .mi.,-;
Г
2m;nAQ -. -яmctx
- Q
в о
(11)
tvnn
Далее определяется безразмерный оценочный коэффициент психофизиологической устойчивости обучаемого Кц, который характеризуется чистотой и величиной отклонений ДQо (текущей напряженности обучаемого QT от оптимального ее значения QOTir)
иг - Qonr- M(&Q ) К3
опт
(2
MUQJ о
m
(13)
это математическое ожидание величин отклонения, а т - число отклонений,
Q
.
vnotx
+ Q
mm
После определения оценочных коэффициентов надежности действий обучаемого К |, и его психофизиологической устойчивости К и определяется безразмерный оценочный коэффициент психофизиологического состояния обучаемого К
L9
который равен
К,
- Ки
Т
(15)
Значения Кн, Кь и К запоминают- ки, око снабжено тремя блоками регися
L 11 , IV {Л IV Л)
в соответствующих ячейках памяти
страции параметров, вторым блоком
.
10
15
20
25
30
14
второго блока 10 регистрации параметров.
Вычисляются количество ошибок Р, R и G, сделанных по каждому из трех контролируемых параметров у , у и h, а также произведения соответствующих коэффициентов ошибочных действий по каждому параметру, т.е. величины Пц, Пу,, и П , после чего определяется и запоминается в третьем блоке 11 регистрации параметров оценочннй коэффициент ошибочных действий Каs
К° { 16) После вычисления значений оценочных коэффициентов качества действий Кк, психофизиологического состояния Кф и ошибочных действий обучаемого водителя К0 выполняются программа определения комплексного (итогового) оценочного безразмерного коэффициента мастерства управления транспортным средством Км
К и - К., К/„ К.
(17)
ЧЛ ivK -0 °
а также вывод значений частных и общей оценки на дисплей блока I5 индикации, при этом формулы (l) - (17) являются основой алгоритмов соответствующих подпрограмм расчета оценок.
Формула изобретения
35
50
55
., входом блока динамики движения,пер- вый, второй и третий выходы которого подключены соответственно к первому, второму и третьему выходам блока оценки, а выход блока динамики движения соединен с первым входом блока оценки, четвертый, пятый,шестой „ седьмой и восьмой выходы которого подключены соответственно к первому, йторому, третьему, четвертому и пятому входам первого блока информации, отличающееся тем, что, с целью повышения точности оценстрации параметров, вторым блоком
15
1538179
информации, блоком контроля текущей Напряженности обучаемого, таймером и блоком индикации оценки, при этом Первый, второй и третий входы соот- Йетственно блока задания маршрута г(ульта руководителя обучения, перво- rfo и второго задатчиков параметров, т,рех блоков регистрации параметров IJE блока индикации оценки соединены Соответственно с первым,, вторым и третьим выходами блока оценки,пер- ыый вход которого подключен к выхо- Лам соответственно первого и второго ;адатчиков параметров,.трех блоков регистрации параметров, пульта руко- Еодителя обучения и к первому выходу блока задания маршрута, второй выход Которого соединен с- входом второго
блока информации, а датчики состояния органов управления, размещенные it блоке рабочего места обучаемого, Подключены к второму входу блока с ценки, третий и четвертый выходы которого соединены соответственно с выходами блока контроля текущей напряже йояти и таймера,вход которого подключен к девятому выходу блока оценки.
Фив. 2
0
5
0
-
5
J6
2, Устройство по п,1, о т л и - чающееся тем, что блок задания маршрута выполнен в виде задатчика номера маршрута, дешифратор адреса, первого, второго, третьего и
четвертого модулей кодов информации первые входы которых соединены с первым входом дешифратора адреса и первым входом блока задания маршрута, третий вход которого соединен с пер-г- вым входом задатчика номера маршрута9 выход которого подключен к вторым входам первого, второго, третьего и четвертого модулей кодов информации, третьи входы которых соединены между собой и подключены к второму выходу дешифратора адреса, первый выход которого соединен с вторым вчодом задатчика номера маршрута, а второй вход дешифратора - с вторым входом блока задания маршрута, первый выход которого подключен к выходам первого, второго и третьего модулей кодов информации, при этом выход четвертого модуля кодов информации соединен с вторым выходам блока задания маршрута.
Фи&З
Начало j
SSecmu 8 задам Тпараметры
hup
IJSecmuS за$ат 8 параметры
№еслм 8$лок Ю параметры
Qmax,QsT7i/i
Ввести 8 ffjTOK /7 параметры
Kr,Kj,Ktt,fa
Ввести 8 3S damwx Блока tit noftoftempu
Запустить тйймер
Разрешить прерыбание
Шать преры бвние, аыл&л- №ть рым. лроерам.
( Конец 3
/г.4
s-effl
s.1
1315-S
S| w
Ь s
ff
#: W.I a
u ,
IT L/
®
a
jpf
°-l
Й
%.
#ъ
f
Ul
OJ
со -j
D
Счита/пь ff елохе 8 порам о Охр
Ммцир. 1 Ifa faoxa
6
Считать Ку 8 5л 11
Сравнить Г с
JL
Инищ/р 1 1 ЛЯх. Улока, S
Считать в блоке 8лаpQM.ctlKp
1
Сравнит
Лг С СЬкр.
Считать КЬ$&п.Ц
Считать 8 блоке // парам. 5
±
Вычислить парам SV5
{
Сравнит Vrcfffy
Считать 8 5л И парен. С
i
Вычислить парам €Vj
СраВнить VrctVy
/Рж7
lUMtras j
Физ.7
| Устройство для обучения водителей наземных транспортных средств | 1983 |
|
SU1170485A1 |
| Разборный с внутренней печью кипятильник | 1922 |
|
SU9A1 |
