со
С


| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ ОЦЕНКИ МАСТЕРСТВА ВОЖДЕНИЯ ОПЕРАТОРА БРОНИРОВАННОЙ ГУСЕНИЧНОЙ МАШИНЫ | 1997 |
|
RU2123724C1 |
| Устройство для обучения водителей транспортных средств | 1986 |
|
SU1350658A1 |
| УСТРОЙСТВО ДЛЯ ОБУЧЕНИЯ ВОДИТЕЛЕЙ ГУСЕНИЧНЫХ МАШИН | 1997 |
|
RU2113016C1 |
| Устройство для обучения водителей транспортных средств | 1987 |
|
SU1531126A1 |
| БОРТОВОЙ ТРЕНАЖЕР ВОЖДЕНИЯ ГУСЕНИЧНОЙ МАШИНЫ | 2010 |
|
RU2433483C1 |
| Устройство для оценки мастерства управления транспортным средством | 1988 |
|
SU1538179A1 |
| ТРЕНАЖЕР ДЛЯ ОБУЧЕНИЯ ВОЖДЕНИЮ ТРАНСПОРТНОГО СРЕДСТВА | 1996 |
|
RU2131146C1 |
| УСТРОЙСТВО ДЛЯ ОЦЕНКИ ПЛАВНОСТИ ХОДА ГУСЕНИЧНЫХ МАШИН ПРИ ОБУЧЕНИИ ВОЖДЕНИЮ | 1997 |
|
RU2113015C1 |
| ТРЕНАЖЕР ДЛЯ ОБУЧЕНИЯ МЕХАНИКА-ВОДИТЕЛЯ ГУСЕНИЧНОЙ МАШИНЫ | 2016 |
|
RU2661176C2 |
| УСТРОЙСТВО ДЛЯ КОНТРОЛЯ ДВИЖЕНИЯ ТРАНСПОРТНЫХ СРЕДСТВ | 1994 |
|
RU2094853C1 |


Изобретение относится к средствам контроля и оценки мастерства вождения транспортных средств, а точнее к средствам контроля и оценки мастерства вождения автомобиля на автодроме. Цель изобретения повышение качества оценки мастерства вождения транспортных средств. Устройство содержит размещенные на транспортном средстве регистратор 21 положения транспортного средства, блок 23 коммутации, два блока 33, 34 сравнения, четыре счетчика 29-32, сумматор 37, звуковой сигнализатор 38. цифровые индикаторы 39. блок 35 выдержки времени, задающий генератор 36, датчики вертикальных 27 и горизонтальных 28 перегрузок и датчики 26 габаритов. При включении устройства обеспечивается регистрация основных ошибок, влияющих на оценку мастерства вождения транспортного средства. 2 з.п, ф-лы, 7 ил., 1 табл.
40
О
го го
00 00
о
Фив I
Изобретение относится к средствам контроля и оценки мастерства вождения транспортных средств, а точнее к средствам контроля и оценки мастерства вождения автомобиля на автодроме.
Целью изобретения является повышение качества оценки мастерства вождения транспортных средств.
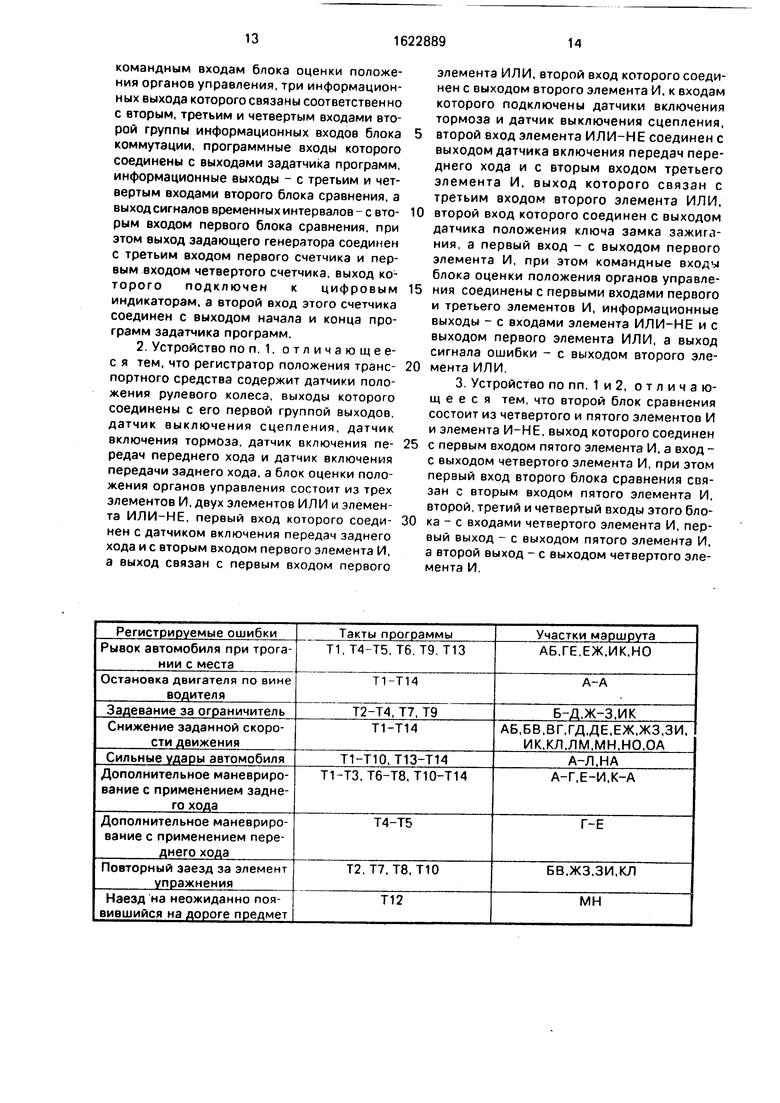
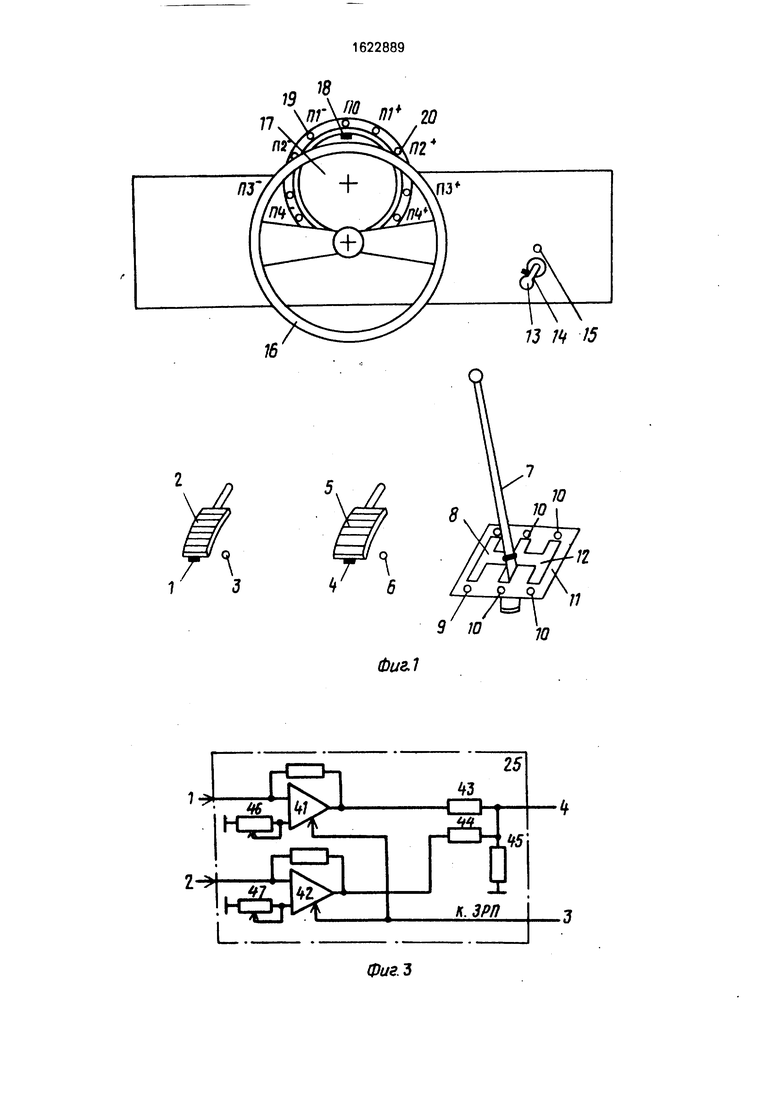
На фиг. 1 изображено расположение датчиков устройства на органах управления автомобилем; на фиг. 2 - общая структура устройства; на фиг. 3 - схема блока регистрации перегрузок; на фиг. 4 - схема блока оценки положения органов управления; на фиг. 5 - схема второго блока сравнения; на фиг. 6 - маршрут комплексного упражнения с последовательностью формируемых и регистрируемых в устройстве команд; на фиг. 7 - таблица сигналов по тактам программы.
Устройство для оценки мастерства вождения транспортных средств содержит датчик выключения сцепления, состоящий из магнита 1, размещенного на педали 2 и маг- нитоуправляемого элемента 3, установленного на полу кабины автомобиля, датчик включения тормоза, состоящего из магнита 4, размещенною на педали 5 тормоза, и магнитоуправляемого элемента 6. На рычаге 7 переключения передач закреплен магнит 8, который при перемещениях рычага образует с магнитоуправляемым элементом
9датчик включения передачи заднего хода, а с магнитоуправляемыми элементами 10 - датчик включения передач переднего хода. Магнитоуправляемые элементы 9 и 10 закреплены на панели 11, имеющей паз 12 для перемещения рычага 7. Выходы элемента
10электрически соединены параллельно. На ключе 13 замка зажигания закреплен магнит 14, который образует с магнитоуправляемым элементом 15 датчик положения ключа зажигания. Контакты магнитоуправ- ляемых элементов 3, 6, 9,10 и 15 замыкаются при нажатии водителем на педали 2 и 5, перемещениях рычага 7 и повороте ключа 13 замка зажигания (при пуске двигателя автомобиля). Таким образом, формируются сигналы положения органов управления автомобиля
Ступица обода рулевого колеса 16 посредством зубчатой передачи или шкива связана с датчиком положения рулевого колеса, состоящего из круглого диска 17с размещенным на нем магнитом 18 и панели 19 с магнитоуправляемыми элементами 20 (П5+-П5). Конструктивно диаметр ступицы и круглого диска подобраны так, что их передаточное отношение составляет 1:5 (поворот передних колес автомобилей на максимальный угол соответствует в среднем пяти оборотам рулевого колеса). При повороте рулевого колеса 16 диск 17 также поворачивается и под воздействием магнитного поля магнита 18 замыкаются соответствующие магнитоуправляемые элементы 20, которые формируют сигналы П5- - ПО П5+ и регистрируют таким образом угол поворота передних колес.
Использование в устройстве магнитоуп0 равляемых элементов позволяет быстро и без конструктивных изменений органов управления автомобилем оборудовать его кабину необходимыми датчиками.
Регистратор 21 положения транспорт5 ного средства (фиг. 2) состоит из элементов 3, 6, 9, 10, 20. В состав устройства также входят блок 22 оценки положения органов управления, блок 23 коммутации, задатчик 24 программ, блок 25 регистрации перегру0 зок, датчики 26 габаритов, датчики вертикальных перегрузок 27 и горизонтальных перегрузок 28, счетчики 29-32, блоки 33 и 34 сравнения,блок 35 выдержки времени, задающий генератор 36, сумматор 37, звуко5 вой сигнализатор 38, цифровые индикаторы 39 и блок 40 питания.
Блок 22 оценки положения органов управления содержит информационные входы а, информационные выходы б, командные
0 входы в, и выход сигнала ошибки г. Блок 23 коммутации содержит первую д и вторую е группы командных выходов, первую з и вторую ж группы информационных входов, программные входы и, выход сигналов вре5 менных интервалов к и информационные РЫХОДЫ л. С выходов блока 23 коммутации выдаются команды: к.ВВ - Выдержка времени ; к.ЗРП - Запрет регистрации перегрузок ; кРП - Разрешение поворотов ;
0 к.РДОУ - Разрешение действий органами управления; к.Н - Назад : к.В - Вперед ; на входы этого блока поступают сигналы: с.С - с.В - Вперед : с.Н - Назад : с.П5+ - с.П5+ - Поворот. С выходов блоков
5 22, 25 и 34 и датчика 26 на входы сумматора 37 поступают сигналы с.О - Ошибка, с выхода блока 34 на вход задатчика 24 программ - сигнал с.ПТП - Переключение такта программы, на второй вход первого
0 блока 33 сравнения - сигнал с.Т - Такт, а на второй вход второго блока 34 сравнения - сигнал с.ВВ - Выдержка времени.
Датчики 26 габаритов устанавливаются по бортам автомобиля, на переднем и за5 днем бамперах. При выезде автомобиля за пределы обозначенного маршрута или наезд его на препятствия штоки датчиков задевают за ограничители или препятствия маршрута, отклоняются и вызывают замыкание размещенных внутри датчиков магнитоуправляемых элементов. Таким образом, формируются сигналы задевания автомби- лем за ограничители или наезда на препятствие. В качестве датчиков габаритов можно использовать датчики касания.
Датчики вертикальных 27 и горизонтальных 28 перегрузок размещаются в кабине автомобиля и формируют сигналы ошибок водителя при сильных ударах и рывках автомобиля. В качестве датчиков 27 и 28 можно использовать выпускаемые промышленностью реостатные датчики перегрузок.
В качестве блока 23 коммутации может использоваться микропроцессор, а в качестве задатчика 24 программ - постоянное программируемое запоминающее устройство (ППЗУ). В простейшем случае роль блока коммутации может выполнять шаговый искатель, а задатчика программ - регистры сдвига, в определенных разрядах которых записаны заданные временные интервалы (числа T1-TN), коды команд (K1-KN) и сигналы начала и конца выполнения водителем упражнения (НУ, КУ).
В качестве блока 35 выдержки времени может быть использован триггер с установочными входами, в качестве сумматора 37 - логический элемент ИЛИ, в качестве звукового сигнализатора 38 - автогенератор с усилителем и динамической головкой.
Блок 25 регистрации перегрузок (фиг. 3) содержит компараторы 41 и 42 со стробиру- ющими входами. На резисторах 43-45 собран сумматор. Потенциометрами 46 и 47 устанавливается чувствительность срабатывания компараторов, т.е. регулируются напряжения, при которых сигнал с выходов датчиков 27 и 28 засчитывается устройством ошибок как ошибка (превышение допустимых перегрузок при сильных ударах и рывках автомобиля). При этом на выходе блока 25 появляется сигнал с уровнем напряжения логической единицы. При поступлении на компараторы команды к.ЗРП сигналы с датчиков 27 и 28 на выход блока 25 регистрации перегрузок 25 не проходят.
Блок 22 оценки положения органов управления (фиг. 4) содержит логический элемент ИЛИ-НЕ 48, элементы ИЛИ 49 и 50 и элементы И 51-53. Сигнал с выхода магни- тоуправляемого элемента 15 датчика положения ключа зажигания поступает на один из информационных входов а блока 22 при запусках автомобиля (двигателя) и в ходе выполнения водителем упражнения засчитывается этим блоком как ошибка Остановка двигателя по вине водителя. Этот сигнал через элемент 50 поступает на выход г сигнала ошибки блока 22. Два других входа элемента 50 соединены с выходами элементов 51 и 53. Эти элементы формируют сигналы ошибок при несоответствии положен ш рычага переключения передач 7 командам к.В и к.Н. Поэтому, если на первый вход 5 элемента И 51 поступила команда к.В в виде напряжения логической единицы, а на автомобиле включена передача заднего хода, то на втором входе элемента 51 с выхода элемента 9 датчика включения передач заднего 10 хода также устанавливается напряжение логической единицы. На выходе элемента 51 сформируется сигнал ошибки, который через элемент 50 поступит на выход г блока 22. И наоборот, если на командный вход 15 блока 22 поступит команда к.Н, а на автомобиле включена одна из передач переднего хода, то сигнал ошибки на выход г блока 22 поступит через элементы 53 и 50.
На информационные б выхода блока 22 0 поступают сигналы, соответствующие движению автомобиля вперед (с.В), назад (с.Н) или его остановке (с.С). Сигналы с.Н и с.В формируются непосредственно магнитоуп- равляемыми элементами 9 и 10 датчиков 5 включения передач переднего и заднего ходов. Сигнал с.С передается на выход блока 22 в двух случаях: при нажатии на педали сцепления и тормоза (срабатывание магни- тоуправляемых элементов 3 и 6) или при 0 установке рычага 7 переключения передач в нейтральное положение.
С этой целью выходы мэгнитоуправляе- мых элементов 3 и 6 датчиков подключены к входам элемента И 52, а выходы магнитоуп- 5 равляемых элементов 9 и 10 - к входам элемента ИЛИ-НЕ 48. Если контакты элементов 3 и 6 замкнуты, на выходе элемента 52 устанавливается напряжение логической единицы и через элемент 49 сигнал 0 с.С проходит на информационный выход блока 22. На выходе же элемента 48 сигнал с.С устанавливается только при выключенных элементах 9 и 10, т.е. при подаче на оба входа элемента 48 напряжений логического 5 нуля (нейтральное положение рычага переключения передач).
Второй блок 34 сравнения (фиг. 5) содержит два логических элемента И 54 и 55 и логический элемент И-НЕ 56. Блок выраба- 0 тывает сигнал с.ПТП в момент выполнения водителем заданных действий органами управления автомобилем (в этом случае на всех входах элемента 54 устанавливаются уровни логических единиц), а также сигнал 5 ошибки с.О, обозначающий невыполнение водителем заданных действий органами управления автомобиля в течение такта программы. Сигнал с.ПТП поступает с выхода элемента 54 на вход задатчика 24 программ (фиг. 2), а сигнал с.О выхода элемента 55
поступает на четвертый вход сумматора 37. Сигнал с.О формируется в момент установки на обоих входах элемента 55 уровней логических единиц, т.е. при появлении на одном входе элемента сигнала окончания такта программы от первого блока 33 сравнения (фиг. 2), а на втором входе - сигнала невыполнения водителем требуемых действий органами управления автомобилем, поступающего через элемент 56 с выхода элемента 54 (фиг, 5).
Комплексное упражнение для оценки мастерства вождения (фиг. 6) может включать элементы скоростной участок 57, габаритный тоннель 58, габаритную восьмерку 59, габаритный дворик 60, ров 61, уступ 62, устройство 63, имитации внезапного появления предмета на проезжей части. Движение автомобиля 64 по маршруту передним ходом изображено на фиг. 6 сплошной линией, а задним ходом - пунктиром.
Для составления программы работы устройства маршрут комплексного упражнения предварительно разбивается на участки и выбираются на нем контрольные точки (например, крутые повороты, место остановки автомобиля, место начала его движения передним или задним ходом, место въезда автомобиля на характерный элемент упражнения). Уточняется положение органов управления автомобиля в этих точках и на основе оценки действий квалифицированного водителя определяются временные интервалы движения автомобиля между намеченными точками маршрута. Полученные временные данные в определенном порядке в виде цифр записывается в разряды Т1- TN регистров сдвига задатчика 24 программ (фиг. 2), а коды команд, соответствующие положению органов управления в контрольных точках маршрута, - в разряды K1-KN этих регистров.
Счетчик 29 и блоки 33-34 (фиг. 2) на основе анализа сигналов времени, поступающих на первый вход первого блока 33 сравнения, сигналов такта программы (с.Т), поступающих на второй вход блока 33, сигнала выдержки времени (с.В В), поступающего на второй вход второго блока 34 сравнения, сигналов движения или остановки автомобиля (с.С, с.В, с.Н) и сигналов положения рулевого колеса (с.П5 -С.П54), поступающих на третий и четвертый входы блока 34, вырабатывают сигнал остановки для счетчика 29, сигнал переключения такта программы (с.ПТП) для задатчика 24 и сигнал ошибки (с.О) - превышения требуемого времени движения автомобиля по участку маршрута.
Устройство работает следующим образом.
По сигналу Вперед водитель выполняет действия по троганию автомобиля с места и начинает движение из точки А маршрута (фиг. 6). Согласно программе с задатчика 24 (фиг. 2) через программные входы блока коммутации и его выход сигналов временных интервалов К на вход перво0 го блока 33 сравнения поступает число Т1. Это число определяет заданный такт программы и соответствует интервалу времени, с которым водитель должен проехать участок АБ маршрута (при правильном движе5 нии автомобиля время водителя должно быть не больше заданного). Счетчик 29 начинает счет текущего времени по сигналам генератора 36. Одновременно с задатчика 24 программ в блок 23 коммутации поступа0 ют коды команд к. В и к.П3+(фиг. 7).
В соответствии с кодом команды к.В коммутатор передает напряжение логической единицы от блока 40 питания через вторую группу своих командных выходов е
5 на командный вход в блока 22 и соединяет третий вход второго блока 34 сравнения через вторую группу своих информационных входов ж с тем информационным выходом б блока 22, по которому должны поступать
0 сигналы с.В от датчика включения передач заднего хода. По коду команды к.ПЗ к четвертому входу блока 34 блок 23 коммутации подключает через первую группу своих информационных входов з выход того магни5 тоуправляемого элемента 20 из датчика положения рулевого колеса, замыкание которого происходит при повороте рулевого колеса на угол П3+.
Таким образом, при первом такте Т1
0 программы по кодам команды задатчика 24 в блок 22 выдается напряжение команды к.В, а к входам блока 34 подключается выход датчика включения передач переднего хода и выход одного из элементов датчика поло5 жения рулевого колеса. На втором входе блока 34 в течение такта Т1 постоянно установлен уровень логической единицы с выхода блока 35 выдержки времени (сигнал с.ВВ). При включении водителем передачи
0 переднего хода с выхода элемента 10 на третий вход блока 34 поступает сигнал логической единицы. Сигнал с.ПЗ поступает на вход блока 34 только при проезде автомобилем контрольной точки Б маршрута.
5 При движении автомобиля по участку маршрута возможны следующие ситуации. Водитель проехал участок маршрута за время Те, определенное тактом программы Т1 (оптимальная скорость движения автомобиля), т.е. .
В этом случае в момент совпадения числа Т1 с числом в счетчике 29 (фиг. 9) на четвертом входе блока 34 устанавливается сигнал с.. Так как на третьем входе блока 34 при включении передачи переднего хода постоянно установлен сигнал с.В, то на выходе элемента 54 (фиг. 5) формируется сигнал с.ПТП, который устанавливает счетчик 29 в исходное положение и переключает в задатчике 24 программ следующий такт программы. В соответствии с программой (фиг. 7) на вход блока 33 поступает число Т2, а по кодам программы на вход в блока 22 поступает команда к.В и третий и четвертый входы блока 34 через блок 23 соединяются с одним входом б блока 22 (сигнал с.В) и выходом одного из магнитоуправляемых элементов 20(П4-). Счетчик 29 начинает счет времени для такта программы Т2.
Водитель проехал участок маршрута за время, превышающее длительность такта программы (низкая скорость движения автомобиля), т.е. .
В этом случае при совпадении числа Т1 с числом в счетчике 29 на выходе блока 33 формируется сигнал, поступающий на входы счетчика 29 и блока 34 сравнения. Счетчик останавливается, а с выхода элемента 55 (фиг. 5) блока 34 на вход третьего счетчика 31 и четвертый вход сумматора 37 поступает сигнал ошибки. В устройстве включается звуковой сигнализатор 38, а счетчики 30 и 31 фиксируют допущенную ошибку и отображают ее на цифровых индикаторах 39. Счетчик 31 засчитывает этот сигнал как ошибку превышения требуемого времени движения по первому участку маршрута. В момент проезда автомобилем контрольный точки Б маршрута на четвертом входе блока 34 устанавливается сигнал с.ПЗ . На выходе элемента 54 появляется сигнал с.ПТП, который устанавливается счетчик 29 в исходное положение и переключает в задатчике 24 программ следующий такт программы.
Водитель проехал участок маршрута за время, меньшее времени такта программы (высокая скорость движения автомобиля), т.е. .
В этом случае сигнал с.ПЗ поступает на вход блока 34 раньше, чем на выходе счетчика 29 установится число, совпадающее с Т1. На выходе элемента 54 появляется сигнал с.ПТП, который устанавливает счетчик 29 в исходное положение и переключает в задатчике 24 программ следующий такт программы.
На участке АБ маршрута устройство, кроме ошибки снижения заданной скорости движения автомобиля (превышение заданного времени движения по участку), регистрирует также другие ошибки - остановка двигателя по вине водителя, рывок автомобиля при трогании с места, сильные удары 5 автомобиля, дополнительное маневрирование с применением заднего хода (фиг. 8). Эти ошибки формируются в блоках 22 и 25 и регистрируются счетчиком 30 и звуковым сигнализатором 38.
10При движении автомобиля по участку
БВ на входах блока 34 в момент проезда автомобиля через точку В устанавливаются сигналы с.В и с.П4 (фиг. 6). Счетчик 29 и блоки 33 и 34 так же как и в предыдущем 15 такте программы, оценивают правильность движения автомобиля по показаниям Т2, с.В и с.П4 и выдают сигнал с.ПТП на переключение следующего такта программы ТЗ. Кроме ошибок, указанных для участка АБ 0 маршрута, устройство регистрирует на участке БВ дополнительные ошибки - повторный заезд на элемент упражнения и задевание за ограничитель (фиг. 8). Эти ошибки формируются блоком 22 и датчика- 5 ми 26 габаритов и также регистрируются счетчиком 30 и звуковым сигнализатором 38.
В последующих тактах поограммы принцип работы блоков устройства такой 0 же как и при оценке движения аптомобиля по первому и второму участкам маршрута.
В таблице представлены возможные ошибки водитепя, регистрируемые устройством на всех участках комплексного марш- 5 рута.
На участке Л-Н маршрута с блока 23 коммутации в блок регистрации перегрузок 25 дополнительно поступает команда к.ЗРП, так как на этом уастке возникают 0 значительные перегрузки автомобиля при проезде элементов 61 и 62 (фиг. 6) и при резком торможении перед неожиданно появляющимся на дороге предметом (элемент 63 упражнения). В этих случаях сигналы пе- 5 регрузок не поступают на вход сумматора 37 и не регистрируются счетчиком 30 и звуковым сигнализатором 38 как ошибки.
Кроме команд к.С, к.В, к.Н, к.П, к.ЗРП, задатчик 24 программ на определенныхуча- 0 стках маршрута формирует команды к.ВВ, к.РДОУ и к.РП.
Команда к.ВВ формируется в следующих случаях: если на одном участке маршрута водитель должен несколько 5 повернуть рулевое колесо на один и тот же заданный угол поворота, т е. на вход блока 34 несколько раз в течение такта программы поступает один и тот же сигнал с.П (участки маршрута ЖЗ и ЗИ). если переключение такта программы должно произойти при постоянном прямолинейном движении автомобиля (контрольные точки Л и О маршрута).
Команда к, В В с блока 23 коммутации поступает на вход блока 35 выдержки времени (при использовании триггера в качестве блока 35 команда поступает на вход установки триггера в нулевое состояние). На выходе блока 35 устанавливается сигнал логического нуля, который в течение минимального возможного времени проезда автомобилем данного участка маршрута запрещает появление на выходе элемента 54 блока 34 сигнала с.ПТП. В момент окончания такта программы (при равенстве чисел в блоке 33 сравнения) сигнал с блока 33 поступает на вход установки блока 35 в единичное состояние. На втором входе блока 34 устанавливается уровень логической единицы. Таким образом, сигнал с.ПТП может сформироваться на выходе элемента 54 только после окончания действия команды к.ВВ.
Команда к.РДОУ вырабатывается в устройстве в тех случаях, когда в течение одного такта программы автомобиль несколько раз совершает движения вперед, назад и производит остановки (участок ИК маршрута). В таком такте программы в соответствии с кодом команды на третьем входе блока 34 вместо сигналов с.С, с.В и с.Н постоянно установлен сигнал с.РДОУ в виде уровня логической единицы. Поэтому сигнал с.ПТП формируется на выходе элемента 54 только в момент совпадания сигнала с.П с заданным.
Команда к.РП вырабатывается в устройстве в тех случаях, когда нельзя точно предсказать положение рулевого колеса в конце такта программы, например при торможении и повороте автомобиля перед неожиданно возникающим препятствием на дороге- предметом (контрольная точка Н маршрута).
В таком такте программы в соответствии с кодом команды на четвертом входе блока 34 вместо сигналов с.П постоянно установлен сигнал с.РП в виде уровня логической единицы. Поэтому сигнал с.ПТП формируется на выходе элемента 54 только с момента совпадения сигналов с.С, с.В или с.Н с заданным.
После окончания контрольного заезда по маршруту счетчик 30 регистрирует общее .количество допущенных водителем ошибок, счетчик 31 - количество участков маршрута, на которых скорость движения автомобиля меньше заданной, счетчик 32 - общее время движения автомобиля по маршруту. Счетчик 32 запускается и останавливается по сигналам с.НУ и с.КУ, поступающим с задат- чика 24 программ. Вся информация о результатах заезда отображается на цифровых индикаторах 39.
Формула изобретения
вождения транспортных средств, содержащее расположенные на транспортном средстве регистратор положения транспортного средства, первая группа выходов которого соединена с первой группой информацион0 ных входов блока коммутации, первый блок сравнения, первый вход которого соединен с выходом первого счетчика, а выход связан с первым входом второго блока сравнения и с одним из входов первого счетчика, сумма5 тор, к выходу которого подключены входы звукового сигнализатора и второго счетчика, выход которого соединен с цифровыми индикаторами, блок выдержки времени, за- датчик программ и третий счетчик, о т л и0 чающееся тем, что, с целью повышения качества оценки мастерства вождения транспортных средств, оно снабжено задающим генератором, датчиками горизонтальных и вертикальных перегрузок,
5 датчиками габаритов, датчиком положения ключа замка зажигания, блоком регистрации перегрузок, четвертым счетчиком и блоком оценки положения органов управления, информационные входы которого соедине0 ны с выходом датчика положения ключа замка зажигания и с второй группой выходов регистратора положения транспортного средства, а выход сигнала ошибки связан с третьим входом сумматора, первый вход ко5 торого соединен с выходом датчиков габаритов, второй подключен к выходу блока регистрации перегрузок, входы которого соединены с выходами датчиков горизонталь- ных и вертикальных перегрузок, а
0 четвертый вход сумматора связан с входом третьего счетчика, выход которого подключен к цифровым индикаторам и с первым выходом второго блока сравнения, второй выход которого соединен с входом задатчи5 ка программ и вторым входом первого счетчика, а к второму входу второго блока сравнения подключен выход блока выдержки времени, первый вход которого соединен с выходом первого блока сравнения, а вто0 рой вход подключен к первому выходу первой группы командных выходов блока коммутации, второй выход которого из этой группы выходов соединен с третьим входом блока регистрации перегрузок, а третий и
5 четвертый выходы - соответственно с первым входом первой группы информационных входов и с первым входом второй группы информационных входов блока коммутации, вторая группа командных выходов которого подключена к первому и второму
командным входам блока оценки положения органов управления, три информационных выхода которого связаны соответственно с вторым, третьим и четвертым входами второй группы информационных входов блока коммутации, программные входы которого соединены с выходами задатчика программ, информационные выходы - с третьим и четвертым входами второго блока сравнения, а выход сигналов временных интервалов - с вто- рым входом первого блока сравнения, при этом выход задающего генератора соединен с третьим входом первого счетчика и первым входом четвертого счетчика, выход которого подключен к цифровым индикаторам, а второй вход этого счетчика соединен с выходом начала и конца программ задатчика программ.
элемента ИЛИ, второй вход которого соединен с выходом второго элемента И, к входам которого подключены датчики включения тормоза и датчик выключения сцепления, второй вход элемента ИЛИ-НЕ соединен с выходом датчика включения передач переднего хода и с вторым входом третьего элемента И. выход которого связан с третьим входом второго элемента ИЛИ, второй вход которого соединен с выходом датчика положения ключа замка зажигания, а первый вход - с выходом первого элемента И, при этом командные входы блока оценки положения органов управления соединены с первыми входами первого и третьего элементов И, информационные выходы - с входами элемента ИЛИ-НЕ и с выходом первого элемента ИЛИ, а выход сигнала ошибки - с выходом второго элемента ИЛИ.
18
П
АЈ 20
Г 3
;з к /5
/7
Фиг.1
фиг.Ъ
3
54
-
С./7777
Фиг. 5
Фаг. 4
J
55
3 pH-f27
20
i 5j .
Е/
уууХ Ј -5g
Сигналы
Л .
е-fl с.В с С C.W с С с.8 С.В с.8 СЙШ cfl ев СС с.В С С С./73 с/7Т с/73 с.ЛО с.Л4+ сПЧ+ сЛ5+сП5 сЛО с/74 + С.РП С.ПО с.ПО
А А А А А А А А А А
У /в/ Г1/V / V / V W У
я. В и.в К.С л« д.С к в 8 к В К.ВВ и8 к.8 к.С к.В К.С Командык.ПЭ + к.ПЧ ц,Щ- К.ПЗ+ НПО К.ПЧ + кЈВ к.8В к.РДОУ х.88 кЗРЛ х.ЗРП к.ВВ к.ПО
к. ПЧ + N. П5 К //5 К./ТО к. W к. Р/7 ./70
I ГТ 1 Гг 1 TJ | Г | Г5 | rg | Г I Tg | Г5 I 70 | Щ ТП 713 Т1Ч |
Фиг.7
/1
-//
О
Фиг.6
| Устройство для обучения водителей транспортных средств | 1986 |
|
SU1350658A1 |
| Разборный с внутренней печью кипятильник | 1922 |
|
SU9A1 |
| Кузнечная нефтяная печь с форсункой | 1917 |
|
SU1987A1 |
