Устройство относится к компенсации реактивной мощности в тяговой сети электрических железных дорог.
Цель изобретения - стабилизация напряжения на всем участке тяговой сети и снижение потерь энергии.
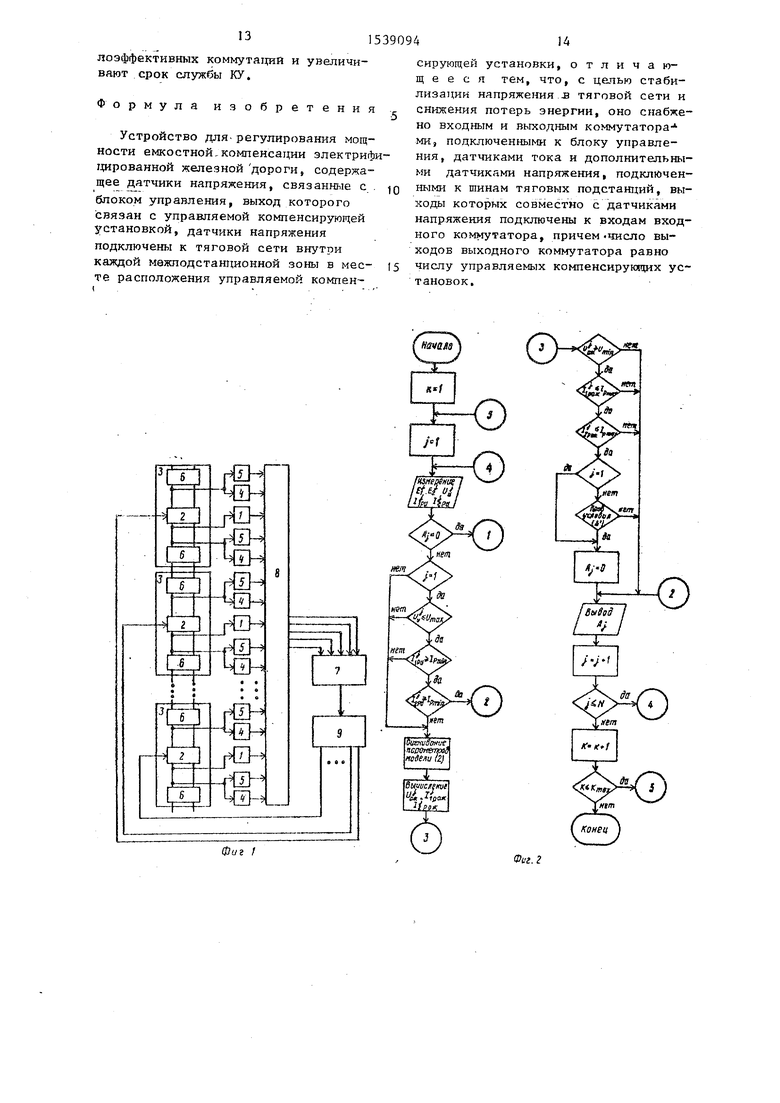
На фиг.1 представлена схема устройства для регулирования мощности емкостной компенсации реактивной мощности электрифицированной железной дороги; на фиг.2 и 3 - блок-схема алгоритма работы блока управления; на фиг.4 - функциональная схема компенсирующего устройства (КУ); на фиг.5 - схема замещения межподстан- ционной доны (МПЯ),
Устройство содержит датчики 1 напряжения, подключенные к тяговой
сети в месте присоединения управляемой компенсирующей установки 2 внутри межподстанционной зоны 3, дополнительные датчики 4 напряжения и датчики 5 тока, подключенные к шинам тяговых подстанций 6, блок 7 управления, связанный с входным коммутатором 8 и выходным коммутатором 9, вн- ходы всех датчиков 1,4 и 5 подключены к входам входного коммутатора 8, число выходов выходного коммутатора Р равно числу управляемых компенсирующих установок. Совокупность межпод- станционных зон (МПЗ) образует участок электрифицированной железной но роги. Питание подстанции получают i системы внеганего электроснабжения (БЭС).
СЛ ОЭ
со
о
CD Ј
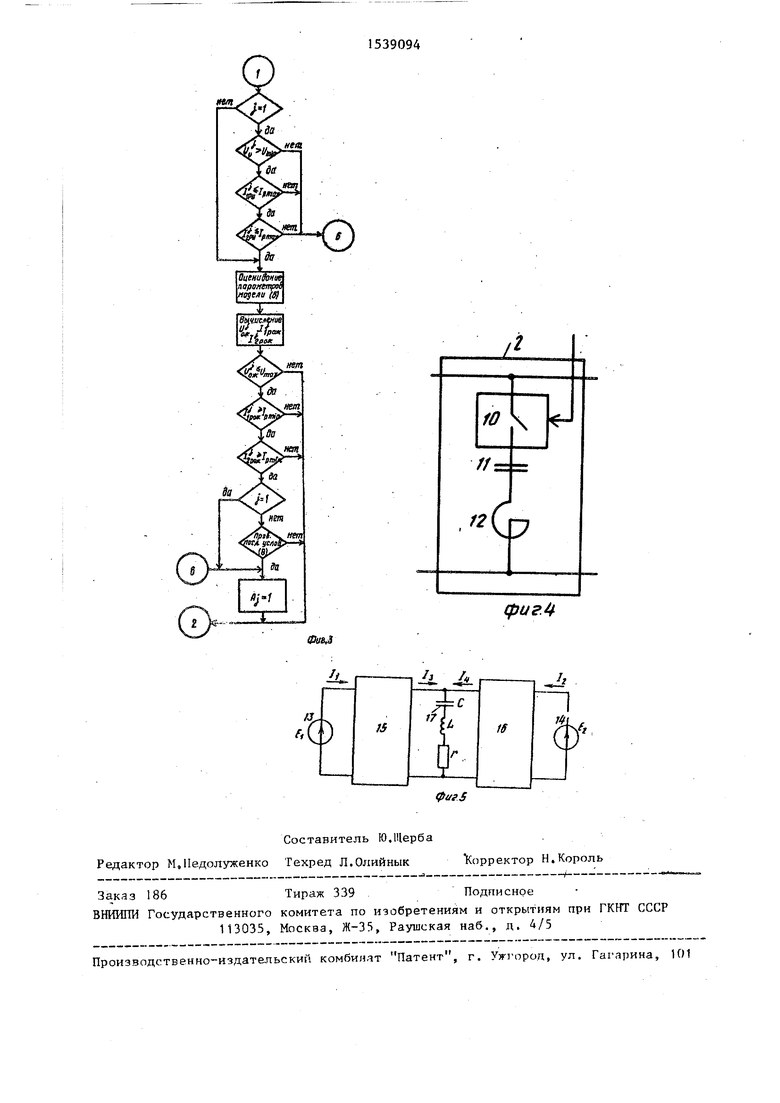
Управляемая компенсирующая установка (КУ) 2 (фиг.4) содержит последовательно соединенные управляемый коммутирующий аппарат 10, конденсаторную батарею 11 и-реактор 12, которые подключены к тяговой сети. Управляющий вход коммутирующего аппарата 10 соединен с управляющими входами компенсирующей установки 2.
Схема замещения МПЗ по фиг.5 содержит первый 3 и второй 14 источники напряжения,, первый 15 и второй 16 четырехполюсники и rLC-цепочку 17. Причем к входам первого 15 и второ- го 16 четырехполюсников подключены первый 13 и втррой 14 источники напряжения соответственно. Выходы четырехполюсников 15, 16 соединены параллельно и к ним подключена rLC- цепочка 17.
Устройство работает следующим образом.
Для всех MII3 3 на выходах датчиков напряжения 4 формируют сигналы, соответствующие напряжениям Е,, К на выходных шинах тяговых подстанций 65 которые ограничивают МПЗ 3, На выходе датчика 1 формируют сигнал напряжения U в тяговой сети в месте подключения КУ4 На выходах датчиков 5 тока формируют сигналы, соответствующие реактивным составляющим Чрц T-zpn токов нагрузки тяговых подстанций 6„ Сигналы с выходов датчиков через входной коммутатор 8 последовательно для всех МПЗ 3 подают на входы блока 7 управления. На вы - ходе блока управления последовательно для всех МГП формируют сигналы Aj управляющие состоянием КУ2. Сигнал A может принимать два значения 0 и 1« При А) 1 коммутирующий аппарат 10 (фиг.4) компенсирующей установки 2 j-й МПЗ замкнут и КУ находится во включенном состоянии, при А- 0 аппарат 10 разомкнут и КУ находится в отключенном состоянии. Сигналы Aj с выхода блока управления через выходной коммутатор 9 последовательно под ют на управляющие входы КУ всех МПЗ, в результате чего все КУ устанавливают в требуемое состояние,
Блок управления может быть реализован на управляющей ЦВМ. В этом случае алгоритм работы устройства (фиг,2 и 3) имеет следующий вид
1, Задают AJ - 1, j l,N, т.е. переводят все КУ во включенное сое-
тояние (N - количество МПЗ на участке).
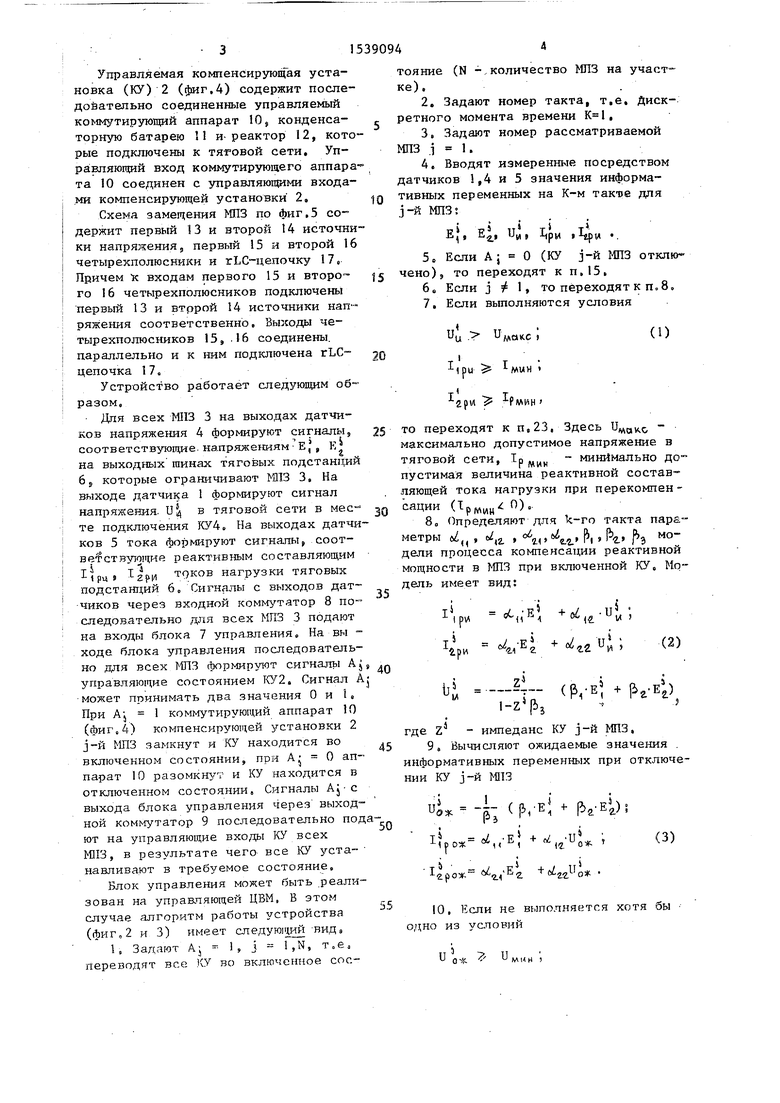
2.Задают номер такта, т.е. Дискретного момента времени ,
3.Задают номер рассматриваемой МПЗ .
4.Вводят измеренные посредством датчиков 1,4 и 5 значения информативных переменных на К-м такте для j-й МПЗ:
pi Fi
-fci . Ь„
тт1 т1 т1 ии -мри «-Црм
м «.
50 Если А; О (КУ j-й МПЗ отключено), то переходят к п.15.
6 Если j ф 1, то переходят к п.8, 7, Если выполняются условия
Uмакс
: I,
(О
мин
гр
IF
МИН
то переходят к п. 23. Здесь UwaKC, - максимально допустимое напряжение в тяговой сети, Тр мим минимально допустимая величина реактивной составляющей тока нагрузки при перекомпенсации (tpwwH-t о)е
8 Определяют для Ч-го такта пара- метры «( , ил , ,,6, Р, , 1, модели процесса компенсации реактивной мощности в МПЗ при включенной КУ, Модель имеет вид:
Ч, Е
+ ,
Л„,Е + d
и
гг ии
(2)
bi
..2L
:zV3
(v4
где ZJ - импеданс КУ j-й МПЗ,
9, Вычисляют ожидаемые значения информативных переменных при отключении КУ j-й МПЗ
(3)
55
10. Если не выполняется хотя бы одно из условий
3 о
- U,
t ро. р макс 1г ро. Тр макс j
(4)
1539094
( рО - М EJ + ,
4..EJ +«te.U .
-г pox- «ъ«ьг.
гг uox


| название | год | авторы | номер документа |
|---|---|---|---|
| Способ регулирования мощности емкостной компенсации | 1988 |
|
SU1610541A1 |
| Способ регулирования мощности емкостной компенсации в тяговой сети | 1987 |
|
SU1504723A1 |
| УНИВЕРСАЛЬНЫЙ ЭЛЕКТРОИЗМЕРИТЕЛЬНЫЙ ПРИБОР ПЕРЕМЕННОГО ТОКА | 1973 |
|
SU362246A1 |
| Цифровой измеритель RLC-параметров | 1986 |
|
SU1337820A1 |
| Способ настройки тока компенсации в электрической сети и устройство для его осуществления | 1983 |
|
SU1176412A1 |
| Цифровой измеритель RLC-параметров | 1986 |
|
SU1357874A1 |
| СПОСОБ РЕГУЛИРОВАНИЯ НАПРЯЖЕНИЯ ИЛИ ТОКА ФИЛЬТРА RLC, НОСИТЕЛЬ ИНФОРМАЦИИ И ТРАНСПОРТНЫЕ СРЕДСТВА ДЛЯ ПРИМЕНЕНИЯ ЭТОГО СПОСОБА | 2008 |
|
RU2459346C2 |
| Устройство автоматического регулирования напряжения компенсирующими устройствами и отпайками трехобмоточного трансформатора в центре питания | 1987 |
|
SU1474793A1 |
| Устройство для измерения комплексных параметров двухполюсника | 1988 |
|
SU1659900A1 |
| Устройство автоматического регулирования напряжения для выпрямительно-инверторных преобразователей тяговых подстанций | 1982 |
|
SU1108603A1 |
Изобретение относится к области компенсации реактивной мощности в тяговой сети электрических железных дорог. Цель изобретения - стабилизация напряжения в тяговой сети и снижение потерь энергии. Устройство содержит датчики напряжения 1, подключенные к тяговой сети в месте присоединения управляемой компенсирующей установки 2 внутри межподстанционной зоны 3, дополнительные датчики напряжения 4 и датчики тока 5, подключенные к шинам тяговых подстанций, блок управления 7, связанный с входным коммутатором 8 и выходным коммутатором 9, выходы всех датчиков 1, 4 и 5 подключены к входам входного коммутатора 8, число выходов выходного коммутатора 9 равно числу управляемых компенсирующих установок. Устройство включает управляемые компенсирующие установки в случае положительного прогноза улучшения режима напряжения. 5 ил.
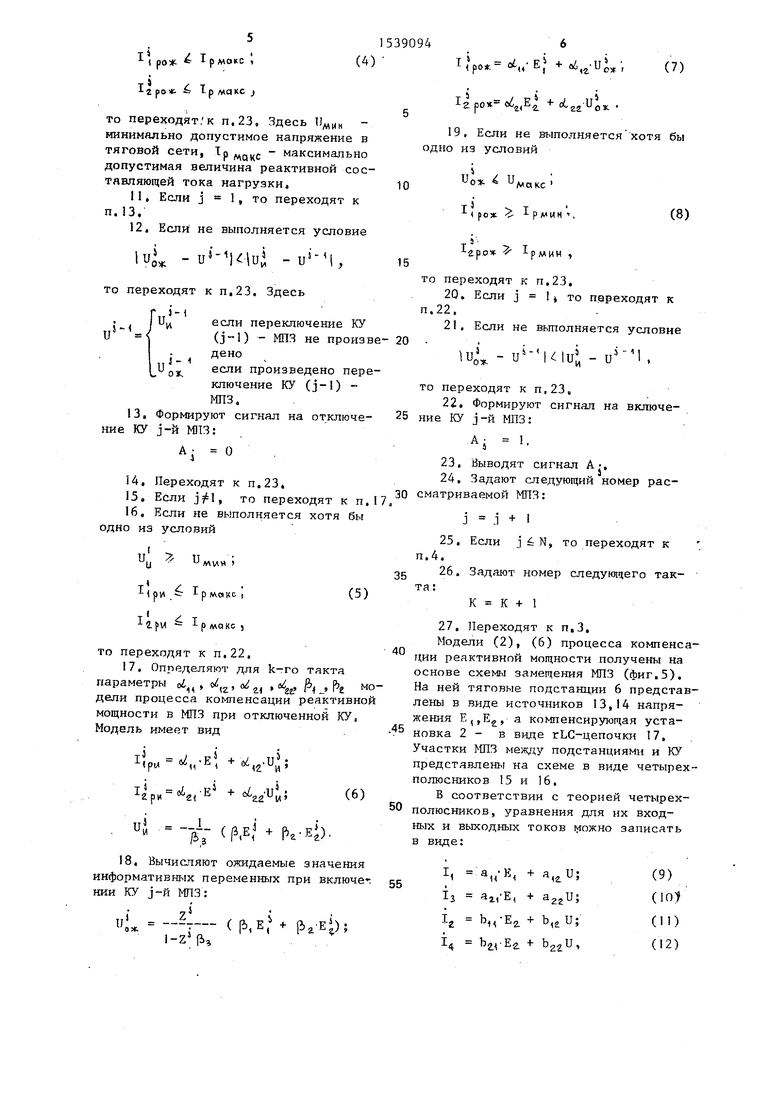
то переходят/к п.23. Здесь Пмми нинимапьно допустимое напряжение в тяговой сети, Тр макс - максимально допустимая величина реактивной составляющей тока нагрузки,
I п5 тт 111 тт5 IT I I и0ч, U I c 1ии -и )
то переходят к п,23. Здесь .3-1
19, Если не выполняется хотя бы одно из условий
10
U
о
& U
МП КС
1|
рож
I
р мин ,
(8)
15
2 1рмцн ,
U
J-
U
1Л
X;
то переходят к п.23.
iC-U KlDj-u - l,
если переключение КУ (j-1) - МПЗ не произве- 20 дено
если произведено переключение КУ (j-1) - то переходят к п.23, МПЗ,22. Формируют сигнал на включе13, Формируют сигнал на отключе- 25 ние КУ j-й МПЗ: ние КУ j-й МПЗ:А 1
J
А- О
14,Переходят к п.23.
15,Если , то переходят к п,17,
16,Если не выполняется хотя бы одно из условий
иц У, и
ри т
р плакс )
(5)
та:
т L т
ipw J-pMOKCj
К К + 1
17, Определяют для k-ro такта основе схемы замещения МПЗ (фиг.5). параметры oi , °( ге fil- Pt. мо а не тяговые подстанции 6 представ- дели процесса компенсации реактивной лены в виде источников 13,14 напряжения Е(,Е2, а компенсирующая уста- 45 новка 2 - в виде rLC-цепочки 17. Участки №3 между подстанциями и КУ представлены на схеме в виде четырехполюсников 15 и 16.
В соответствии с теорией четырехмощности в МПЗ при отключенной КУ. Модель имеет вид
iJP, -EJ, +,Х;
+ ,;
(6)
50
полюсников, уравнения для их входных и выходных токов можно записать в виде:
iJ
u« ь3- №J + IV Ф18, Вычисляют ожидаемые значения информативных переменных при включен нки КУ j-й МПЗ:
С ---- ( ); l-Z1
19, Если не выполняется хотя бы одно из условий
U
о
& U
МП КС
I
р мин ,
(8)
15
2 1рмцн ,
то переходят к п.23.
iC-U KlDj-u - l,
ние КУ j-й МПЗ: А 1
J
j j + 1
та:
50
полюсников, уравнения для их входных и выходных токов можно записать в виде:
а„-К, + a,U;
аг,-Е, + a22U; Ь„-Ег + Ъл U;
. + Ьгги,
(9) (Ю1
(И)
(12)
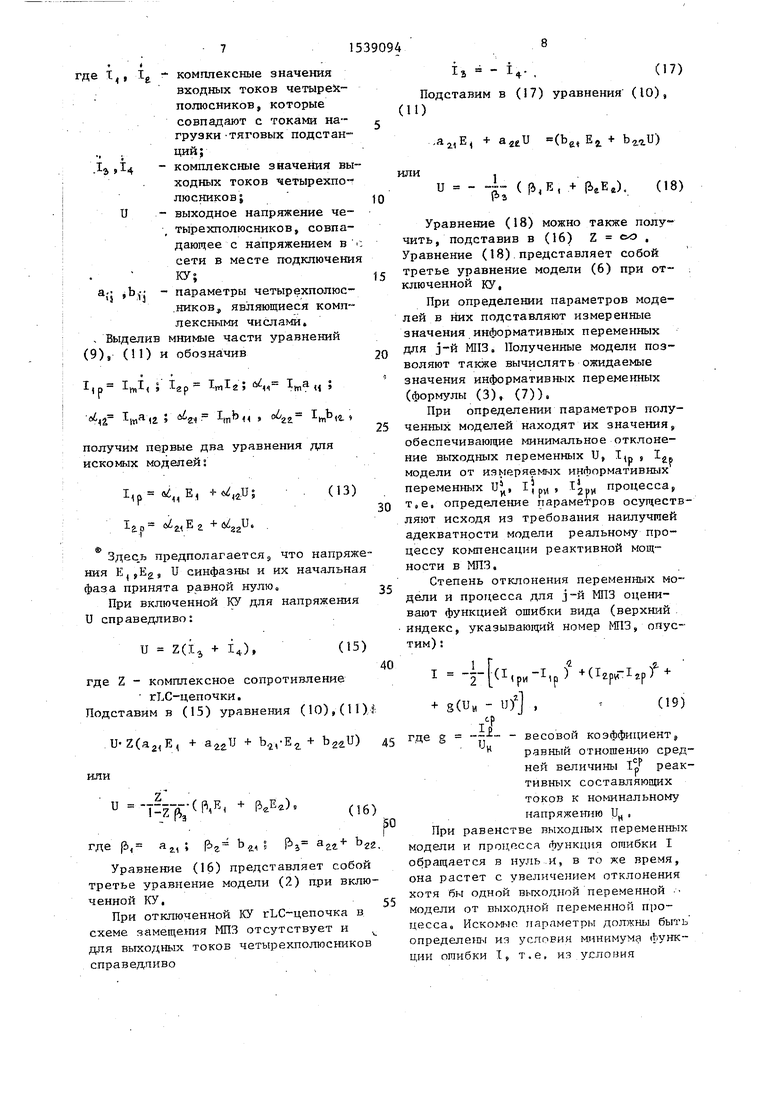
де I4, Tfc - комплексные значения
входных токов четырехполюсников , которые совпадают с токами на- с грузки тяговых подстан- .. . Ций;
.1Э,14 комплексные значения выходных токов четырехполюсников JQU - выходное напряжение четырехполюсников, совпадающее с напряжением в . сети в месте подключения КУ;15 kfi параметры четырехполюсников, являющиеся комплексными числами. , Выделив мнимые части уравнений 9), (11) и обозначив20
Т Т « Т TTtA/- То
1р ш-Ч Lap J-wJ-2 ЖЧ «- J-mct ц «fc г гг Imbi4-
25
получим первые два уравнения для искомых моделей:
„Е, + «,4и; Iap йгг,Е2 + .
(13)
Здесь предполагается 9 что напряжения EjfEg, U синфазны и их начальная фаза принята равной нулю,
При включенной КУ для напряжения U справедливо:
U - Z(t. + 14),
(15)
где Z - комплексное сопротивление
rLC-цепочки. Подставим в (15) уравнения (10),(I1)J
U Z( + a22U + Ъг,-Ег + b22U) 45 Где §
или
и т...(№ + №)s(16)
где |Ь, я.и ; (Ьг b&, ; |bs агг+ Ьг2|
Уравнение (16) представляет собой третье уравнение модели (2) при включенной КУ.25
При отключенной КУ rLC-цепочка в схеме замещения МПЗ отсутствует и для выходных токов четырехполюсников справедливо
Is - - V .
(17)
Подставим в (17) уравнения (10), (П)
.аа,Е, + a4tU (ba, Ег + )
или
и - -Ј; Р,Е. + 1Ь«Е.). (18)
т«е
Уравнение (18) можно также получить, подставив в (16) Z е-о , Уравнение (18) представляет собой третье уравнение модели (6) при отключенной КУ.
При определении параметров моделей в них подставляют измеренные значения информативных переменных для j-й МПЗ. Полученные модели позволяют также вычислять ожидаемые значения информативных переменных (формулы (3), (7)).
При определении параметров полученных моделей находят их значения, обеспечивающие минимальное отклонение выходных переменных U, ,„ , 1г модели от измеряемых информативных переменных U, , Т1 процесса,
определение параметров осуществляют исходя из требования наилучшей адекватности модели реальному процессу компенсации реактивной мощности в МПЗ,
Степень отклонения переменных модели и процесса для j-й МПЗ оценивают функцией ошибки вида (верхний индекс, указывающий номер ШЗ, опустим) :
0
5
5 Где §
J
1 +(1груГ1гр) + + 8(UM - U)Z ,
JL.
(19)
весовой коэффициент, равный отношению средней величины ТрР реактивных составляющих токов к номинальному напряжению UH.
При равенстве выходных переменных модели и процесса функция ошибки I обращается в нуль и, в то же время, она растет с увеличением отклонения хотя бы одной выходной переменной модели от выходной переменной процесса. Искомые параметры должны быть определены из условия минимума функции ошибки I, т.е. из условия
.9153909410
lW,-j , (bj) -r-- мин .(20)- I,p )J
tj P
Для достадгения минимума функциио 2Д +М ( Ip параметры oi-,-j , Ј,- , изменяясь во5r Т
времени t, должны подстраиваться та- I2p|.+ j)
ким образом, , чтобы, стартуя с неко--.г 1 Г 1г 1
торого начального значения, (-2.
достигли значений, обеспечивающих вы-r -i
полнение условия (20). Для этого не-10 )«(23)
обходимо, чтобы при подстройке пара-,-,
метров происходило их движение поПеременные ,I,p K+lJ ,
чантиградиенту функции I, т,е, в нап-1гр к+1 в соответствии -с (13),(14)t
равлении ее наиболее быстрого убыва-(16), (18) определяются по формулам
ния. Тогда уравнения для подстройки15r -iг Т г 1
параметров si,-j , $ принимают вид: ipl + J +
-ЧМ - ЧМ-|Й7
20 IK+| - К +
i 1,2; j 1,2;(21)
i. u Ь
.К+, . |Ь, К - |-i- ,1-ЬЗ,(22)UIK+0 7Ы(
25 -Z(b3W
где аргумент в квадратных скобках оз-.. , г- -
начает номер такта,, PzW E2LK+1J 2
С учетом выражений (13), (14) частные производные определяются поU Гк+ll -( ft Гк Е к+Г| +
Формулам30Ј3{к LJ L J
f i, 9(I 1 Р } + W Е2 К+1 ).(25)
и (1,.- I,.)Выражение (24) используется при вклю35ченной КУ, (25) - при отключенной. 31 а 1(й /т т ч „
.wi«. «з « --..-- J.U.-. f J - вЭ Т
,3 о61г (РИ (РДля производных спРавеДливо
ai di,j эи Г7 т
- и(1 Р );40 з17 эр; ( г«р}
,.1 т Э 1и Э U ,тт ч
- WV Р}- .dtpM- T2P) „ э ч-аи э( L2P
- В Ц- (и„ - U).(26)
эи
8
Ei( I2p)5-45,0,ч
ГгВ соответствии с (26), выражения
ЭХ9l2pч (22) при включенном КУ принимают вид:
-3 ( - г , г ,г , ZE.lKiil, x
|b,tK+iJ- PAKJ i-z
- - I2P} 5° X() +
Тогда выражения (21) принимают видг vj.ilг п
-1н.,,1И-я+ -й1 ж 1-и- i,p K+i ;-i2pM )+s ,Щ- (. о6( + и к+i - - и к+i);
i. u Ь
И1539094 |2
М |ЭДД 1,риМ- ilplK i) ж х (i2p«M )+gfz| i|(ujK+i )5
аГк+i +ei Гк z l&Islji.LK±lLiЈa ilKiJii. x 11 (i-z|ib K f
()М 2 Ш „Мш1 1к 1к1111.(1 )+
(l-Z ()
+ g s lbLblKiiL+uIdjtLfiili. ( tK+l )(
O-Z ()
Для включенной КУ выражения для подстройки параметров (V , принимают вид
Р,М iJiifw.p..piKHi KibjgiL.
( ) - S l|iil u, и к+1);(28)
(bjK+i P K - jK MKiiJ(5I(K+l )Гк |1|Йх x ( тяДк+1)- ( .
При отключенной КУ параметр Jснижение потерь электроэнергии и поподстраивать напьчя9 так как в уран-выгаение напряжения в системе ВЭС и
нении (18) появляется неоднознач- 35тяговой сети.
ность, поэтому уравнение для подстрой- Расчеты и экспериментальные исслеки принимает лиддования показали, что на головных
участках сети ВЭС формируется около
p) ,70-80% всех потерь электроэнергии и
40около 40-70% всех потерь напряжения„
В связи с этим на первом такте, Системная компенсация реактивной
когда начинается процесс управления,мощности на всех МПЗ вызывает в первсе КУ переводят во включенное сое-вую очередь снижение потерь электротояние, чтобы вычислить значение па-энергии и напряжения именно на гораметра Начальные значения па- 45ловных участках сети ВЭС, создавая
раметров при К 0 принимают равнымит ем самым общий стабилизирующий эфнулю, т.е.фект. Практически стабилизация напряжения на всем участке осуществляется
0; 0,путем минимизации отклонения между
50напряжениями в смежных МПЗ,
Таким образом, в восьмом пункте Изменение состояния КУ осуществляалгоритма работьГ устройства 6 пара-ют только в том случае, если моделиметры для К-го такта определяются порование ожидаемого режима показывает
формулам (23), (27), а в 17 пункте -что переключение КУ приведет к улучпо формулам (23), (28).55шению режима напряжения или компенсаКомпенсация реактивной мощности в Nции реактивной мощности в тяговой
любой МПЗ вызывает снижение реактив-сети, Таким путем ограничивают колиных составляющих токов в системечество переключений коммутирующих апВЭС и обеспечивает таким образомпаратов КУ, благодаря исключению ма13
неэффективных коммутаций и увеличивают срок службы КУ.
1
Ф о
рмула изобретения
Устройство для регулирования мощности емкостной компенсации электрифцированной железной дороги, содержащее датчики напряжения, связанные с блоком управления, выход которого связан с управляемой компенсирующей установкой, датчики напряжения подключены к тяговой сети внутри каждой межподстанционной зоны в месте расположения управляемой компен
Фиг
1539094
14
сирующей установки, отличающееся тем, что, с целью стабилизации напряжения я тяговой сети и снижения потерь энергии, оно снабжено входным и выходным коммутатора ми, подключенными к блоку управления, датчиками тока и дополнительными датчиками напряжения, подключенными к шинам тяговых подстанций, выходы которых совместно с датчиками напряжения подключены к входам входного коммутатора, причем .число выходов выходного коммутатора равно числу управляемых компенсирующих установок.
Фиг г
фиг4
| Мамогаин P.P | |||
| и Зимакова A.M | |||
| Электроснабжение электрифицированных железных дорог | |||
| М.: Транспорт, 1980, с.144. |
