Изобретение относится к способам компенсации реактивной мощности в электрических системах и предназначено для использования в тяговых сетях с резкопеременными нагрузками, в частности в межподстанционных зонах электрифицированных участков железны дорог.
Цель изобретения - минимизация потребления реактивной мощности от тяговых подстанций, ограничивающих межподстанционную зону, и увеличение срока службы компенсирующей установки путем оптимизации количества дис- кретных изменений мощности емкостной компенсации.
Способ заключается в том, что помимо контроля напряжения внутри меж- подстанционной зоны измеряют активны и реактивные составляющие токов нагрузки тяговых подстанций, ограничивающих зону. На основе измеренных значений токов нагрузки определяют коэффициенты передачи и аддитивные составляющие уравнений моделирования процесса компенсации реактивной мощности и вычисляют оптимальные величины емкостей компенсации, обеспечивающие наименьшее значение показателя недокомпенсации. Если уровень показателя недокомпенсации в текущий момент времени превышает допустимый уровень или наинизший уровень напряжения в заданных точках зоны падает ниже допустимого, то емкости компенсации устанавливают равными тем заданным дискретным значениям, отклонение которых от оптимальных величин минимально.
Показатель недокомпенсации формируется как сумма квадратов реактивных составляющих токов нагрузки двух смежных тяговых подстанций. Его величина тем больше, чем больше реак- . тивной мощности передается по тяговой сети в межподстанционной зоне.
На фиг.1 изображена функциональна схема реализации способаj на фиг.2 - функциональная схема компенсирующей установкиJ на фиг.З - схема замещени межподстанционной зоны; на фиг.4 - схема моделирующего устройстваj на фиг.З - схема первого матричного преобразователя; на фиг.6 - схема вто- рого матричного преобразователя; на фиг.7 - схема третьего матричного преобразователя; на фиг,8 - схема гщентифчкатора; на фиг.9 - схема пер5
0
0
0 5 0
5
Q
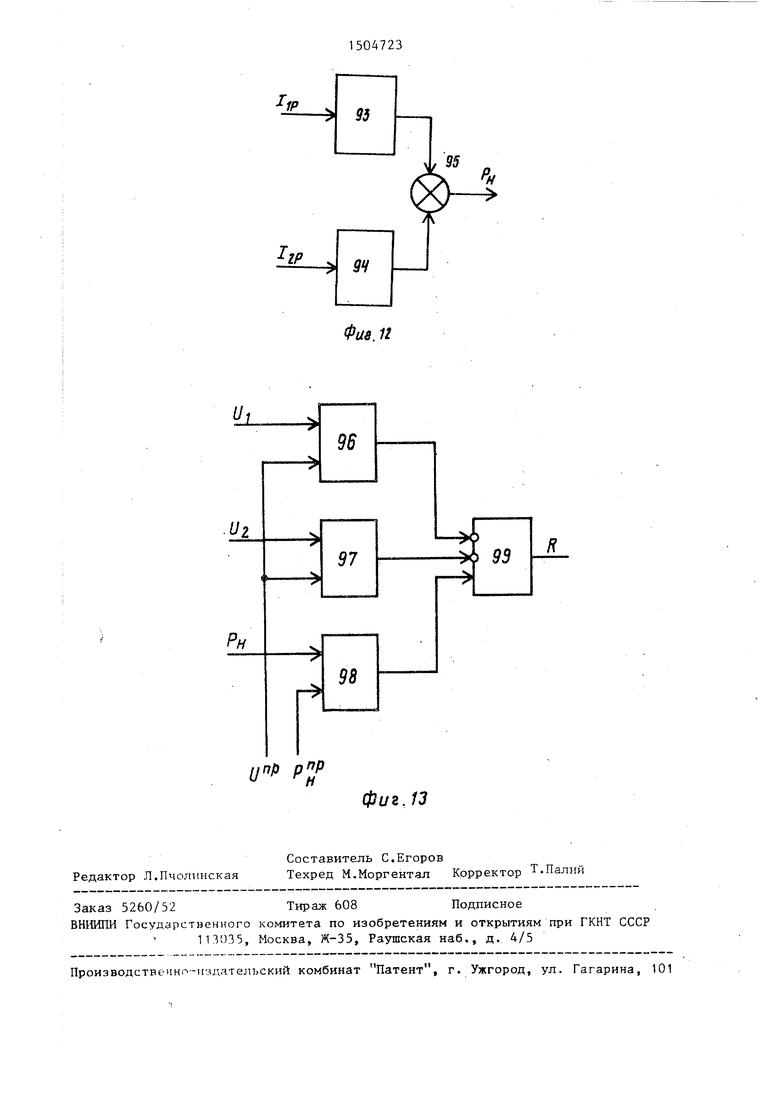
вого векторного преобразователя; на фиг.10 - схема второго векторного преобразователя; на фиг.11 - схема регулятора; на фиг.12 - схема формирователя показателя недокомпенсации, на фиг.13 - схема устройства выработки разрешения.
Схема реализации способа (фиг.1) содержит две связанные тяговой сетью смежные тяговые подстанции 1 и 2, регулируемую компенсирующую установку 3, индентификатор 4, регулятор 5, аналого-цифровой преобразователь (АЦП) 6, управляемый ключ 7, цифро- аналоговый преобразователь (ЦАП) 8, фо рмирователь 9 показателя недокомпенсации, блок 10 выработки разрешения и источники 11 и 12 уставок, причем выходы измерителей активных и реактивных составляющих токов нагруз- ки, размещенных на тяговых подстанциях 1 и 2, соединены с первой группой входов идентификатора 4 и входами формирователя 9. Выходы идентифика- тора 4 соединены с входами регулятора 5, выходы которого через АЦП 6 подключены к коммутируемым входам ключа 7. Выходы ключа 7 соединены с управляющими входами компенсирующей установки 3 и через ЦАП 8 с второй группой входов идентификатора 4. Выход формирователя 9 соединен с тре- .тьим входом устройства 10, первый и второй входы которого подключены к выходам соответственно первого и второго датчиков напряжения, совмещенных с компенсирующей установкой 3. Устройство 10 снабжено двумя установочными входами, присоединенными к источникам уставок соответственно по минимально допустимому напряжению в тяговой сети (11) и по максимально допустимому уровню показателя недокомпенсации (12). Выход устройства 10 подключен к управляющему входу ключа 7.
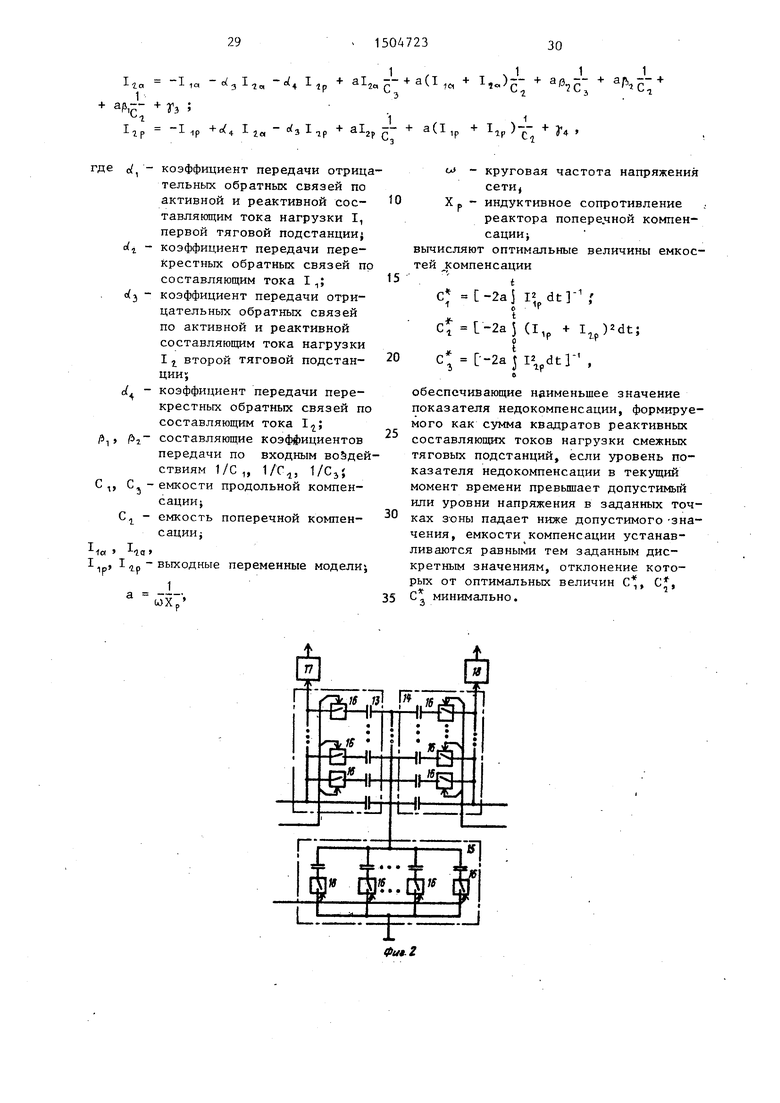
Компенсирующая установка (фиг.2) состоит из первой 13 и второй 14 батарей конденсаторов установки продольной компенсации, включенных последовательно в разрез контактной се-; ти, и батареи 15 конденсаторов поперечной компенсации, включенной первым выводом между батареями 13 и 14, а вторым - на землю. Батареи 13 и 14 содержат (п + 1) параллельно соединенных конденсаторов, первые п из которых снабжены управляемыми ключами 16, включенными последовательно с конденсаторами. Батарея 15 содержит (тп + 1) параллельно соединенных конденсаторов, первые m из которых снаб|Жены управляемыми ключами 16, включенными последовательно с конденса- - торами. Управляющие входы ключей 16 присоединены к управляющим входам установки 3. Установка имеет также первый 17 и второй 18 датчики напряжения, входы которых подключены к тяговой сети в месте подключения первой 13 и второй 14 батарей соответственно.
Схема по фиг.З содержит два источника напряжения Е и Е с подключенными параллельно им активными сопротивлениями г, гз соответственно.
три емкости С , по схеме звезда.
С и
два противления Z и Z и индуктивность Хр. Вторые выводы емкостей С, и Cj, через сопротивления Z и Z подключены к первым выводам источников Е. и Е соответственно. Второй вьгоод емкости CT через индуктивность Х- подключен
вторым выводам источников
Е| и Е,.
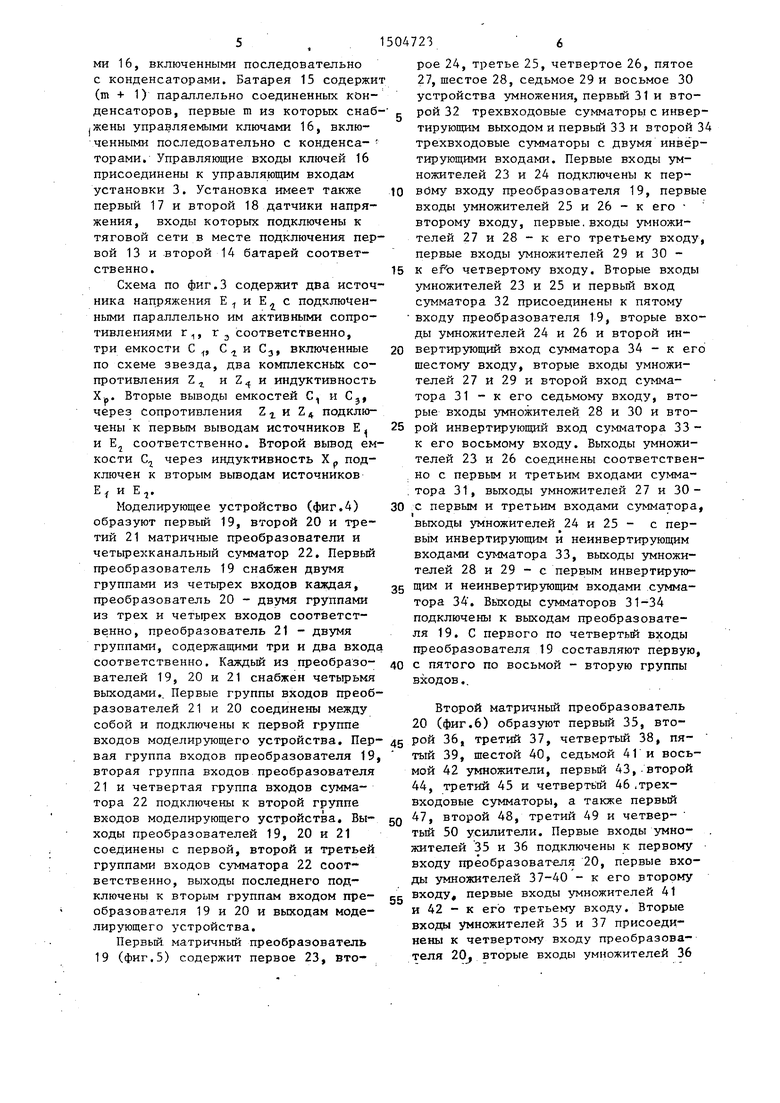
Моделирующее устройство (фиг.4) образуют первый 19, второй 20 и третий 21 матричные преобразователи и четырехканальный сумматор 22. Первьш преобразователь 19 снабжен двумя группами из четырех входов каждая, преобразователь 20 - двумя группами из трех и четырех входов соответственно, преобразователь 21 - двумя группами, содержащими три и два входа соответственно. Каждый из преобразователей 19, 20 и 21 снабжен четырьмя выходами.. Первые группы входов преобразователей 21 к 20 соединены между собой и подключены к первой группе
25 рой инвертирующий вход сумматора 33 - к его восьмому входу. Выходы умножителей 23 и 26 соединены соответственно с первым и третьим входами сумма- , тора 31, выходы умножителей 27 и 3030 с первым и третьим входами сумматора, выходы умножителей 24 и 25 - с первым инвертирующим и неинвертирующим входами сумматора 33, выходы умножителей 28 и 29 - с первым инвертирую35 щим и неинвертирующим входами сумматора 34. Выходы сумматоров 31-34 подключены к выходам преобразователя 19. С первого по четвертьй входы преобразователя 19 составляют первую,
40 с пятого по восьмой - вторую группы входов..
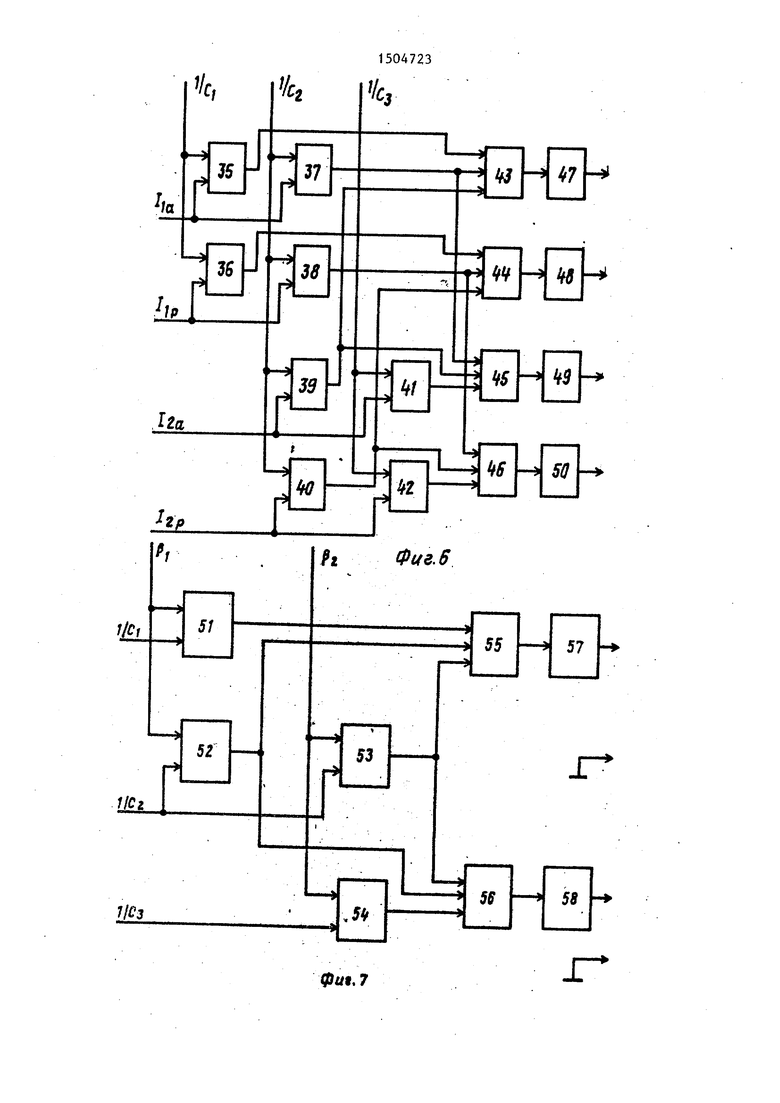
Второй матричный преобразователь 20 (фиг.6) образуют первый 35, втовходов моделирующего устройства. Пер- 45 Р° третий 37, четвертый 38, пя- вая группа входов преобразователя 19, тый 39, шестой 40, седьмой 41 и восьмой 42 умножители, первый 43,-второй 44, третий 45 и четвертьш 46 .трехвходовые сумматоры, а также первый 47, второй 48, третий 49 и четвертый 50 усилители. Первые входы умножителей 35 и 36 подключены к первому входу преобразоват-еля 20, первые входы умножителей 37-40 - к его второму входу, первые входы умножителей 41
вторая группа входов преобразователя 21 и четвертая группа входов сумматора 22 подключены к второй группе входов моделирующего устройства. Выходы преобразователей 19, 20 и 21 соединены с первой, второй и третьей группами входов сумматора 22 соответственно, выходы последнего подключены к вторым группам входом преобразователя 19 и 20 и выходам моделирующего устройства.
Первый матричный преобразователь 19 (фиг.5) содержит первое 23, вто50
55
И 42 - к его третьему входу. Вторые входы умножителей 35 и 37 присоединены к четвертому входу преобразователя 2Qj вторые входы умножителей 36
рое 24, третье 25, четвертое 26, пятое 27, шестое 28, седьмое 29 и восьмое 30 устройства умножения, первый 31 и вто- с рой 32 трехвходовые сумматоры с инвертирующим выходом и первый 33 и второй 34 трехвходовые сумматоры с двумя инвертирующими входами. Первые входы умножителей 23 и 24 подключены к пер0 вОму входу преобразователя 19, первые входы умножителей 25 и 26 - к его второму входу, первые,входы умножителей 27 и 28 - к его третьему входу, первые входы умножителей 29 и 30 5 к efo четвертому входу. Вторые входы умножителей 23 и 25 и первый вход сумматора 32 присоединены к пятому входу преобразователя 19, вторые входы умножителей 24 и 26 и второй ин0 вертирующий вход сумматора 34 - к его шестому входу, вторые входы умножителей 27 и 29 и второй вход сумматора 31 - к его седьмому входу, вторые входы умножителей 28 и 30 и вто5 рой инвертирующий вход сумматора 33 - к его восьмому входу. Выходы умножителей 23 и 26 соединены соответственно с первым и третьим входами сумма- , тора 31, выходы умножителей 27 и 300 с первым и третьим входами сумматора, выходы умножителей 24 и 25 - с первым инвертирующим и неинвертирующим входами сумматора 33, выходы умножителей 28 и 29 - с первым инвертирую5 щим и неинвертирующим входами сумматора 34. Выходы сумматоров 31-34 подключены к выходам преобразователя 19. С первого по четвертьй входы преобразователя 19 составляют первую,
0 с пятого по восьмой - вторую группы входов..
Р° третий 37, четвертый 38, пя- тый 39, шестой 40, седьмой 41 и восьмой 42 умножители, первый 43,-второй 44, третий 45 и четвертьш 46 .трехвходовые сумматоры, а также первый 47, второй 48, третий 49 и четвертый 50 усилители. Первые входы умножителей 35 и 36 подключены к первому входу преобразоват-еля 20, первые входы умножителей 37-40 - к его второму входу, первые входы умножителей 41
И 42 - к его третьему входу. Вторые входы умножителей 35 и 37 присоединены к четвертому входу преобразователя 2Qj вторые входы умножителей 36
7- 1
и 38 - к его пятому входу, вторые входы умножителей 39 и 41 - к его шестому входу, вторые входы умножителей 40 и 42 - к его седьмому входу Входы сумматора 43 .соединены с выходами умножителей 35, 37 и 39, входы сумматора 44 - с выходами умножителей 36, 38 и 40, входы сумматора 45 ;С вькодами умножителей 37, 39и41 |Входы сумматора 46 - с выходами умно жителей 38, 40 и 42, Выходы суммато- |ров 43-46 через усилители 47-50 при |соединены к выходам преобразовате- |ля 20, С
1-.,. . первого по третий входы пре |образователя 20 составляют первую, |с четвертого по седьмой - вторую
группы входов,
Третий матричный преобразователь |21 (фиг,7) содержит первый 51, вто- |рой 52, третий 53, четвертьй 54 умно- |жители, первый 55 и второй 56 трех- (входовые сумматоры, а также первый 57 и второй 58 усилители. Первый вход умножителя 51 присоединен к первому входу преобразователя 21, первые входы умножителей 52 и 53 - к его второму входу, первый вход умножителя 54 - к его третьему входу. Вторые входы умножителей 51 и 52 подключены ;К четвертому входу преобразовате- ;лей 21, вторые входы умножителей 54 ;и 53 - к его пятому входу. Входы сум- ;матора 55 соединены с выходами умно- жителей 51-53, входы сумматора 56 - с выходами умножителей 53, 52 и 54,
;Выходы сумматоров 55 и 56 через уси1.,
: лители 57 и 58 соответственно присое ; динены к первому и третьему выходам преобразователя 21, второй и четвер- тый выходы которого подключены к корпусу, С первого по третий входы преобразователя 21 составляют первую, четвертый и пятый - вторую группы входов,
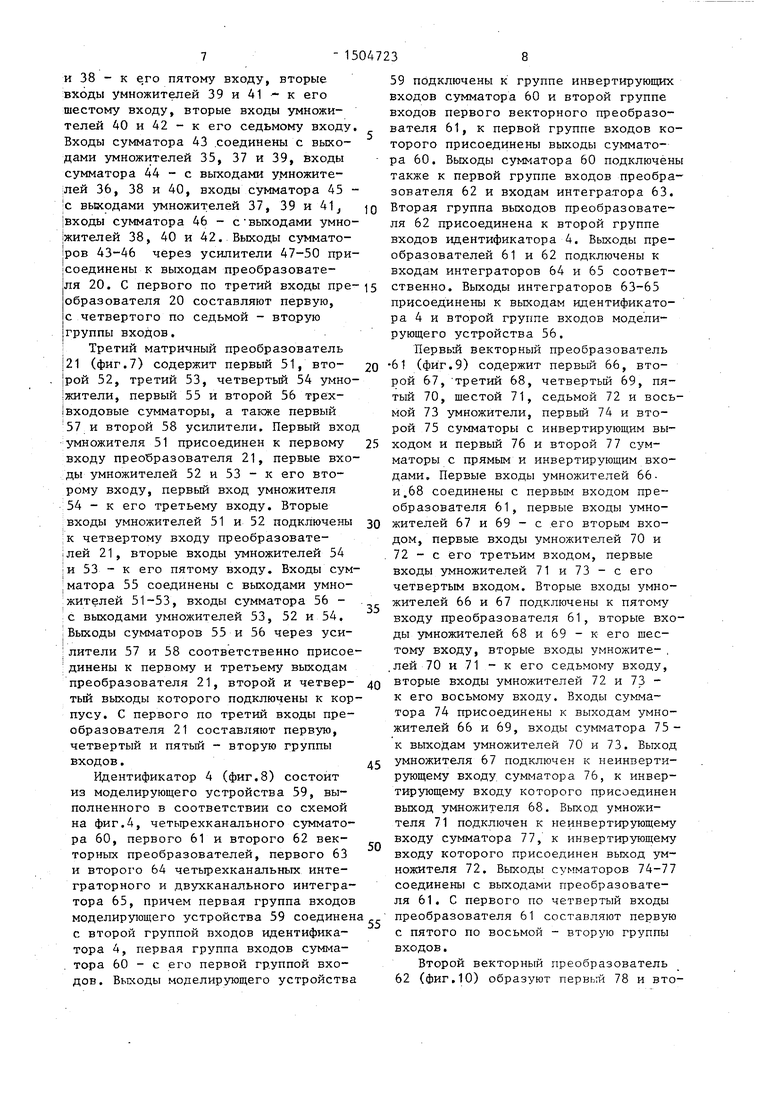
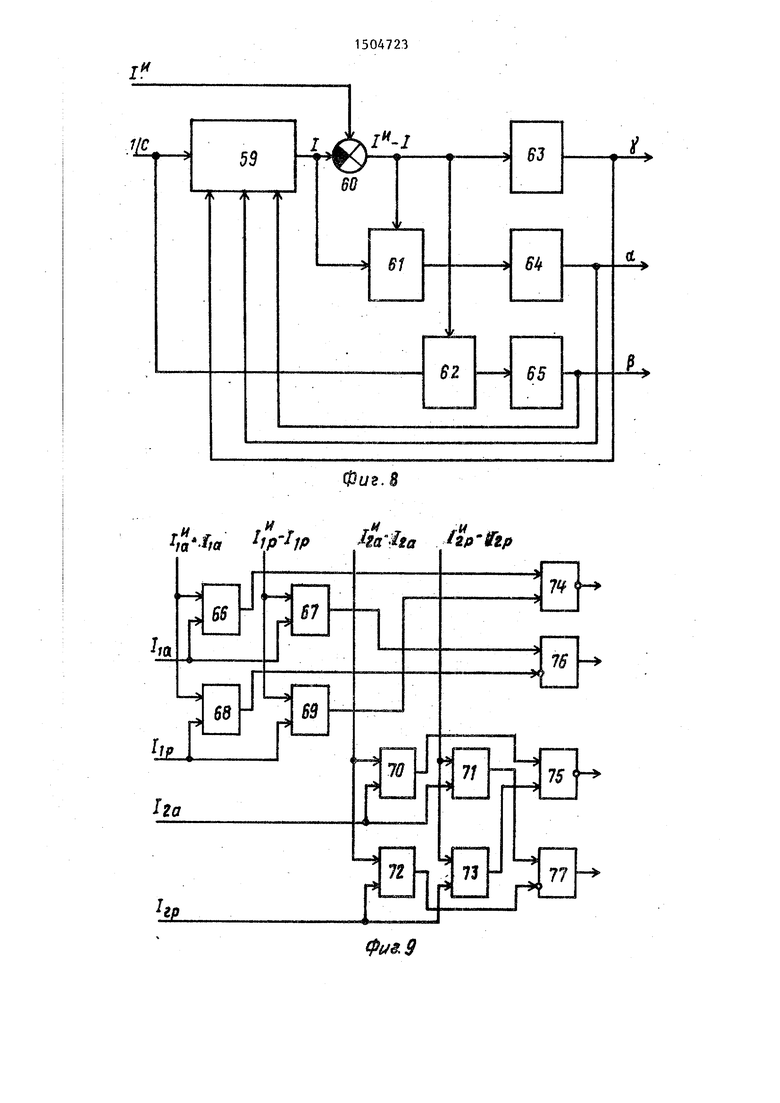
Идентификатор 4 (фиг,8) состоит из моделирующего устройства 59, выполненного в соответствии со схемой на фиг,4, четьфехканального сумматора 60, первого 61 и второго 62 векторных преобразователей, первого 63 и второго 64 четырехканальных инте- граторного и двухканального интегратора 65, причем первая группа входов моделирующего устройства 59 соединен с второй группой входов идентификатора 4, первая группа входов сумматора 60 - с его первой группой входов. Выходы моделирующего устройства
0
0
5
5
0
5
0
5
59 подключены к группе инвертирующих входов сумматора 60 и второй группе входов первого векторного преобразователя 61, к первой группе входов которого присоединены выходы сумматора 60, Выходы сумматора 60 подключены также к первой группе входов преобразователя 62 и входам интегратора 63, Вторая группа выходов преобразователя 62 присоединена к второй группе входов идентификатора 4, Выходы преобразователей 61 и 62 подключены к входам интеграторов 64 и 65 соответственно. Выходы интеграторов 63-65 присоединены к выходам идентификатора 4 и второй группе входов моделирующего устройства 56,
Первый векторный преобразователь 61 (фиг,9) содержит первый 66, второй 67, третий 68, четвертый 69, пятый 70, шестой 71, седьмой 72 и восьмой 73 умножители, первый 74 и второй 75 сумматоры с инвертирующим выходом и первый 76 и второй 77 сумматоры с прямым и инвертирующим входами. Первые входы умножителей 66- И.68 соединены с первым входом преобразователя 61, первые входы умножителей 67 и 69 - с его вторым входом, первые входы умножителей 70 и 72 - с его третьим входом, первые входы умножителей 71 и 73 - с его четвертым входом. Вторые входы умножителей 66 и 67 подключены к пятому входу преобразователя 61, вторые входы умножителей 68 и 69 - к его шестому входу, вторые входы умножите- . .лей 70 и 71 - к его седьмому входу, вторые входы умножителей 72 и 73 - к его восьмому входу. Входы сумматора 74 присоединены к выходам умножителей 66 и 69, входы сумматора 75- к выходам умножителей 70 и 73, Выход умножителя 67 подключен к неинвертирующему входу сумматора 76, к инвертирующему входу которого присоединен выход умножителя 68. Выход умножителя 71 подключен к неинвертирующему входу сумматора 77, к инвертирующему входу которого присоединен выход умножителя 72, Выходы сумматоров 74-77 соединены с выходами преобразователя 61, С первого по четвертый входы преобразователя 61 составляют первую с пятого по восьмой - вторую группы входов.
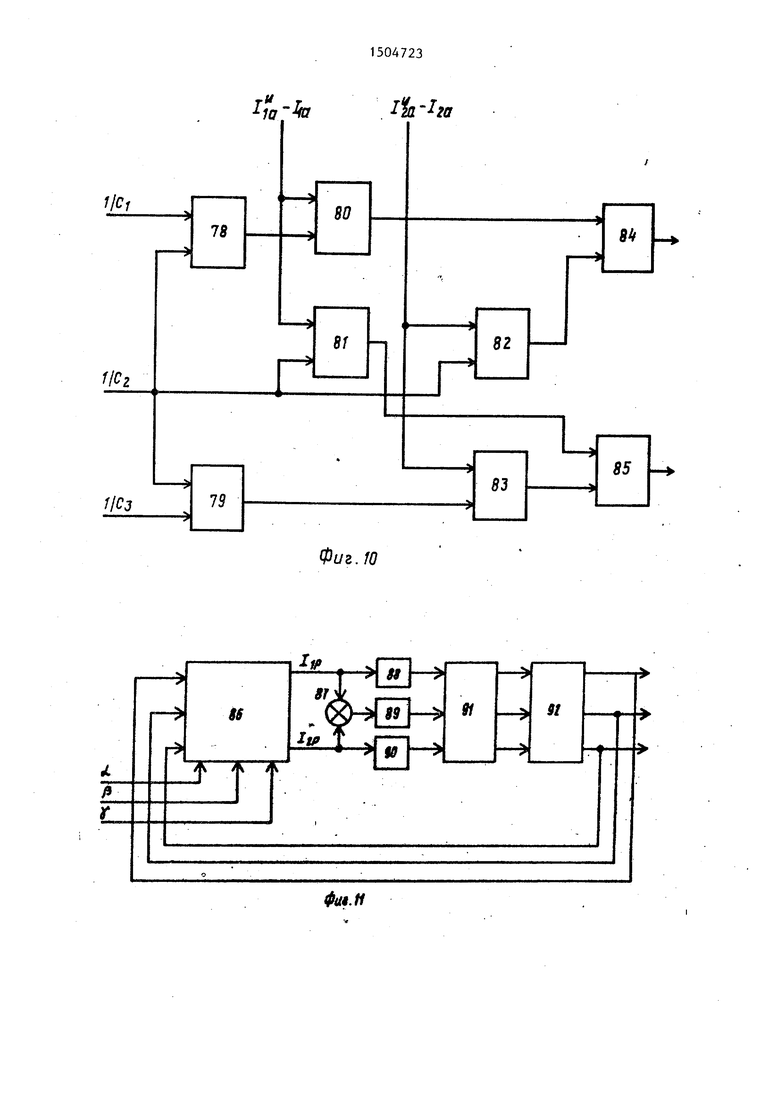
Второй векторный преобразователь 62 (фиг,10) образуют первый 78 и второй 79 сумматоры, первый 80, второй 81, третий 82 и четвертьй 83 умножители, а также третий 84 и четвертьй 85 сумматоры. Первые входы умножителей 80 и 81 присоединены к первому входу преобразователя 62, первые входы умножителей 82 и 83 - к его второму входу. Третий вход преобразовакоторого подключен к выходу формирователя 9.
Устройство 10 (фиг.13) содержит первое 96, второе 97 и третье 98 пороговые устройства и трехвходовьй дизъюнктор 99, снабженный двумя ин- версныМи и прямым входами, причем первые входы пороговых устройств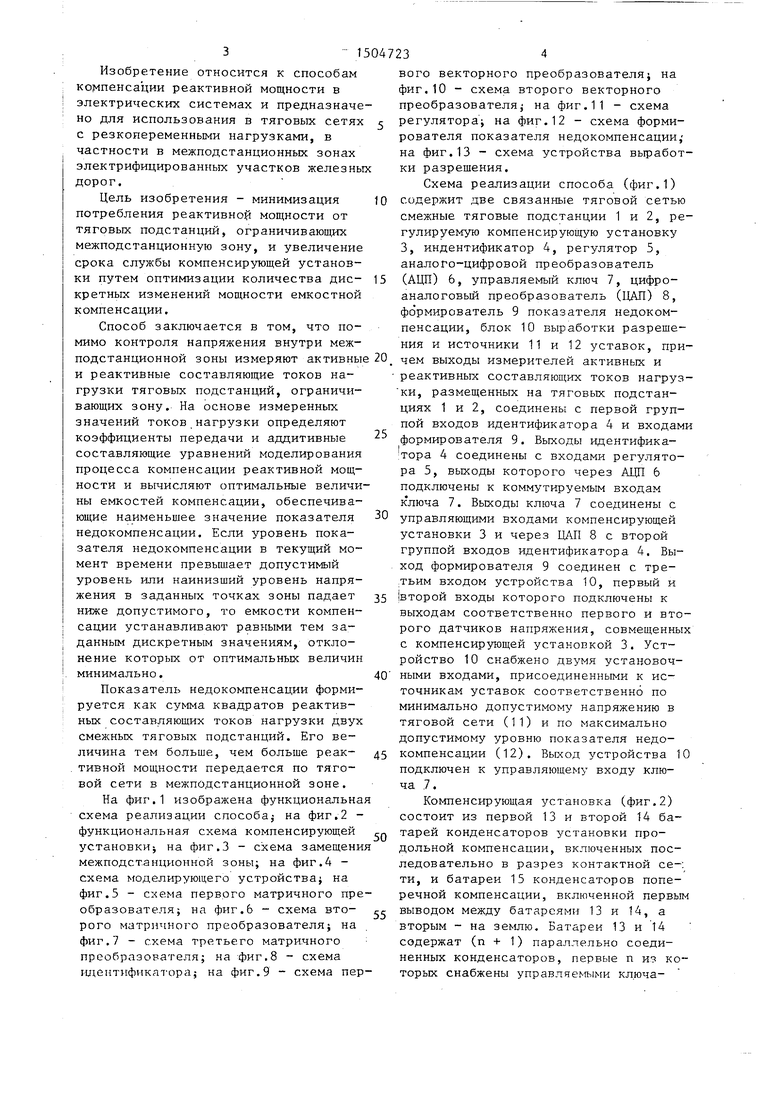





| название | год | авторы | номер документа |
|---|---|---|---|
| Способ регулирования мощности емкостной компенсации | 1988 |
|
SU1610541A1 |
| Устройство для определения вероятностей состояний дискретных марковских процессов | 1988 |
|
SU1532920A1 |
| Устройство для вычисления располагаемой реактивной мощности синхронной машины | 1985 |
|
SU1381544A1 |
| Устройство для регулирования мощности емкостной компенсации электрифицированной железной дороги | 1987 |
|
SU1539094A1 |
| Устройство для управления статическим тиристорным компенсатором | 1985 |
|
SU1309175A1 |
| Телеметрическое устройство | 1989 |
|
SU1674200A2 |
| Устройство для компенсации реактивной мощности | 1986 |
|
SU1347118A1 |
| УСТРОЙСТВО ДЛЯ КОМПЕНСАЦИИ ОТКЛОНЕНИЙ НАПРЯЖЕНИЯ И РЕАКТИВНОЙ МОЩНОСТИ ТРАНСФОРМАТОРНОЙ ПОДСТАНЦИИ | 2006 |
|
RU2316875C1 |
| Способ компенсации искажений токов в многофазных цепях с нелинейными нагрузками | 1988 |
|
SU1571722A1 |
| Устройство для обучения огранщика | 1983 |
|
SU1113835A1 |

Изобретение относится к компенсации реактивной мощности в электрических системах и предназначено для использования в тяговых сетях с резкопеременными нагрузками , в частности, в межподстанционных зонах электрифицированных участков железных дорог. Цель изобретения - минимизация потребления реактивной мощности от тяговых подстанций , ограничивающих межподстанционную зону, и увеличение срока службы компенсирующей установки путем оптимизации количества дискретных изменений мощности емкостной компенсации. Измеряют активные и реактивные составляющие основной частоты токов нагрузки и напряжение в узлах сети. Составляют математическую модель системы электроснабжения, которую реализуют моделирующим устройством блока 4, выход которого связан с входом регулятора. Блок 9 формирует показатель недокомпенсации как сумму квадратов реактивных составляющих токов нагрузки двух смежных тяговых подстанций и выдает в зависимости от этого показателя сигнал на блок 10 выработки сигнала разрешения переключений. 13 ил.
теля 62 соединен с первым входом сум- п 96-98 соединены с первым, вторым.
матора 78, второй вход которого параллельно с первым входом сумматора 79 подключен к четвертому входу преобразователя 62. Пятьй вход преобразователя 62 соединен - с вторым 15 входом сумматора,79. Четвертый вход преобразователя 62 присоединен к вторым входам умножителей 81 и 82. Вторые входы умножителей 80 и 83 подключены к выходам сумматоров 78 и 79, 20 Выходы умножителей 80 и 82 соединены с первым и вторым вхс1дами сумматора 84, выходы умножителей 81 и 83 - с первым и вторым входами сумматора 85, Выходы сумматоров 84 и 85 присоедине- 25 ны соответственно к первому и второму выходам преобразователя 62. Первый и второй входы преобразователя 62 составляют первую, с третьего по пятый - вторую группы входов. 30
Регулятор 5 (фиг.11) содержит моделирующее устройство 86, выполненное в соответствии со схемой на фиг,4, сумматор 87, первьй 88, второй 89 и третий 90 квадраторы, трехканальньй интегратор 91 и трехканальньй усилитель 92. Входы регулятора 5 подключены к второй группе входов моделирующего устройства 86, первая группа входов которого соединена с выходами регулятора 5 и усилителя 92, Второй и четвертый выходы моделирующего устройства 86 присоединены к первому и второму входам сумматора 87, а также через квадраторы 88 и 90 - к первому и третьему входам интегратора 91. Выход сумматора 87 через квадратор 89 соединен с вторьм входом интегратора 91, выходы которого подключены -к соответствующим входам усилителя 92.
Формирователь 9 (фиг.12) состоит, из первого 93 и второго 94 квадраторов, сумматора 95, причем входы формирователя 9 подключены к входам квадраторов 93 и 94, выходы которых соединены соответственно с первым и вторым входами сумматора 95, выход
35
40
45
50
третьим входами устройства 10, вто рые входы пороговых .устройств 96 и 97 соединены между собой и подключ к первому установочному входу устр 10, к второму установочному в ду которого присоединен второй вхо порогового устройства 98. Выходы п роговых устройств 96 и 97 подключе соответственно к первому и второму инверсным входам дизъюнктора 99, к прямому входу которого присоедин выход порогового устройства 98. Вы ход дизъюнктора 99 соединен с выхо устройства 10.
Регулирование мощности емкостно компенсации по предлагаемому спосо осуществляют путем варьирования ем костей конденсаторных батарей 13-1 компенсирующей установки 3 (фиг.2) Варьирование емкостей С , С и C,j, конденсаторных батарей 13-15 осуще вляют посредством управляющих возд
ствий и,
и.
и Uo соответственно.
которые управляют замыканием ключе
К/.
К
Ч16, т.а,
Максимальные емкости достигаютс при замыкании всех ключей. Для уме шения емкостей С ,, С , С з конденса торных батарей 13, 15 и 14 последо вательно размыкают ключи К, K соответственно начиная с последнег замкнутого. Сигналы управления U, Uj представляют собой п-разрядные цифровые коды в соответствии с п с пенями конденсаторных батарей. Зам нутому состоянию ключей К , К. соо ветствуют знаки 1 в J-X разрядах сигналов Ui и Uj соответственно, разомкнутому состоянию этих ключей знаки О, Сигнал U-j представляет бой т-разрядньй цифровой код в соо ветствии с m ступенями конденсатор батарей 15. Дпя замыкания первых j ключей Kj код сигнала U формируют в виде .11... 1 00 ... О .
J in-J
В результате варьирования емкос компенсирующей установки изменяются активные и реактивные составляющие
96-98 соединены с первым, вторым.
третьим входами устройства 10, вторые входы пороговых .устройств 96 и 97 соединены между собой и подключены к первому установочному входу устройства 10, к второму установочному входу которого присоединен второй вход порогового устройства 98. Выходы пороговых устройств 96 и 97 подключены соответственно к первому и второму инверсным входам дизъюнктора 99, к прямому входу которого присоединен выход порогового устройства 98. Выход дизъюнктора 99 соединен с выходом устройства 10.
Регулирование мощности емкостной компенсации по предлагаемому способу осуществляют путем варьирования емкостей конденсаторных батарей 13-15 компенсирующей установки 3 (фиг.2). Варьирование емкостей С , С и C,j, конденсаторных батарей 13-15 осуществляют посредством управляющих воздействий и,
и.
и Uo соответственно.
которые управляют замыканием ключей
5
0
5
0
К/.
К
Ч16, т.а,
Максимальные емкости достигаются при замыкании всех ключей. Для уменьшения емкостей С ,, С , С з конденсаторных батарей 13, 15 и 14 последовательно размыкают ключи К, Kj соответственно начиная с последнего замкнутого. Сигналы управления U, Uj представляют собой п-разрядные цифровые коды в соответствии с п ступенями конденсаторных батарей. Замкнутому состоянию ключей К , К. соответствуют знаки 1 в J-X разрядах сигналов Ui и Uj соответственно, разомкнутому состоянию этих ключей - знаки О, Сигнал U-j представляет собой т-разрядньй цифровой код в соответствии с m ступенями конденсаторных батарей 15. Дпя замыкания первых j ключей Kj код сигнала U формируют в виде .11... 1 00 ... О .
J in-J,
В результате варьирования емкостей компенсирующей установки изменяются активные и реактивные составляющие
токов нагрузки тяговых подстанций, следовательно, и потребляемая от них реактивная мощность.
Для осуществления предложенного способа регулирования необходима математическая модель регулируемого процесса. Модель реализуется в моделирующем устройстве, на вход которог подаются сигналы, соответствующие обратным вели1.1инам емкостей С, С и Сд, т.е. 1/С,, 1/С., 1/Сз, а на выходе формируются сигналы, соответствующие токам нагрузки тяговых подстанций.
Для синтеза модели регулируемого процесса необходима схема замещения межподстанционной зоны (МПЗ) тяговой сети (фиг.З). На схеме источники напряжения Е, и Е обозначают синфазные
r,i, - ,Z,i,, . jXpi, - j-l-i, - j---i, - j-5;i..- JXpI, - гД, о; (2)
иСз - - -
r,l, + z,i, -ь jx,i, - - J-i - - - 41. 0 ()
Tjii - Гз1 Ег. Из уравнений (4) и (1)
§i.
(4)
Е
Р } 3
30 - If /3,, PI действительные числа, (5) являющиеся параметрами модели, то выражения (5) и (6) принимают вид:
(6)1з i, + Pi; 7)
,14 ii + - (8)
Поскольку отклонение фаз контурных -
токов отсчитываются относительно нап- Выражения (7) и (8) подставляют ряжений подстанций Е , и E,, допустим, в уравнения (2) и (3) и представляют что начальные фазы напряжений Е, и все комплексные величины в алгебраиЕ- равны нулю. Ес.гги обозначить кческой форме; . 40 Ь г,
т - i - I, - I, .
г, (1,„ + jl,p +(Ь, ) + (г, + JX,)(I,, + 3l,p + А, ) +JXp(Ii, + JI
fb, - JT.,p + fij - J-Г/.о
1
jiip - -
(9)
+ /Ji) + JXpCl,,, + jlap + /5) - (1,4 + Jlip 05
Ь(Ч« + Jljp ).+ (4+JX)(I + + Pt) , + -ib.p + P) - J ;r/ - V , Лар-|Ьг)-3«5; 1- - .iI,P + /b,) - + jXpCl,, + jl, +/5., ) - г,( + ) 0,(10)
где r,
r 4 ReX ;
X, Ir.iZ,;
X,
Re
-la
,„ e
0
0
5
напряжения тяговых подстанций 1 и 2 соответственно} С, С, С - емкости конденсаторных батарей компенсирующей установки 3 в соответствии с фиг,2} -Х р - индуктивное сопротивление реактора компенсирующей установки. Участок межподстанционной зоны между подстанцией 1 и компенсирующей.установкой 3 представлен на схеме в виде Г-образного четырехполюсника, состоящего из активного сопротивления г и комплексного Z. Участок между подстанцией 2 и установкой 3 представлен в виде Г-образного четьфехполюсника, состоящего из активного сопротивления Гд и комплексного Z.
Уравнения для контурных токов схемы замещения имеют вид
- r.j Е,; (1)
Е
Р } 3
(Р
1
jiip - -
(9)
p 05
Im 1, ;
Im i.
Разделив активные и реактивные составляющие уравнений Г9) и (10), получают
1 (li + , + % - ll .р Y Т + --- Т 4- --- Т - Y Т
Р 1Р cjC, Р ЫС, Р Р 0;
,р + Х,1, + , + Хр1, +
р - jc ы5-Гь, I,, ,i,-ьхрч,
Xp/i 0;
ГзР + г,1г« + Г4 ,р 1 - -1- I + -1
ыС, uiC, Р
Хр I jp + - I, + --- 1,„ + --- 1,0
Хр1 р - 0;
г,1,р + Х,1, + Х,р, + +
Р Ч« - ШС we; г«
ыс7 с
Хр /i, 0.
Полученные уравнения приводят к
едующему виду:
1а 1 I 10 э I 1p I го
а1,„ г- + а(1, + It..)- + afb, -- +
l
а,-- + + ).,;(11)
+
.„ , 1 -с/, I
-(р
1Р -
+ al,p-- + а(1,р + 1ар)с,
7« - -lie. - jl-ra + al, + а(1 + 1,.,)- - ар, +
1 1
a/i,-- + а/1,-- + у ; ь 1
I-2P -Iip + «:4laa - « э1ар + .
45; 1р п
е .,
.
р 1 Хр
5i.
з Хр
Ti
Хр
-r5i
(-- fi,+ р, -ь /3);
п г- хГ
А, ;
(|7Pa-
T. -i;..;
ыХр
Р
,0
Уравнения (11) представляют собой математическую модель регулируемого процесса, в которой величины 1/С, 1/Cj, t/C, являются входными величинами, а токи 1,д, 1,р, 1г„, 1гр
0 выходными. Величина является известным параметром модели, а о,
4 / i Г -74 - неизвестные параметры, поскольку они зависят от величин г.. тс„ , г,, г.
)
1 1 Э
1 4
J5 знач ения которых неизвестны. При этом в соответствии с уравнениями (11) d, - коэффициент передачи отрицатель- ных обратных связей по составляющим 1 , IIP о(, - коэффициент передачи 20 перекрестных обратных связей по составляющим тока о з коэффициент передачи отрицательных обратных связей по йоставляющим , а коэффициент передачи перекрестных
25 обратных связей по составляющим тока 1 F составляющие коэффициентов передачи по входным воздействи- ям 1/Ci, 1/Сг, l/Cj.
30 Уравнения (11) можно представить в матричной форме:.
1 01 +А(1)о/ + ЛВ(1) + AD(1/C)/3 + (12) или , ,
35 I GI + A(I)D/+AB(l)- + AF(/3)- + 2, (13)
где I 11 , 4-мерный
вектор токовI
1/С - 3-мерныйвек- длтор входных
величину с( |Г,г 0(3,0(11
ft 11Л,/3JI ,
TiTi З з T4ll - векторы не15
0(1/0
матрица размерности4 X 2-,
; F(/b) и (1 матрица размерности4x3.
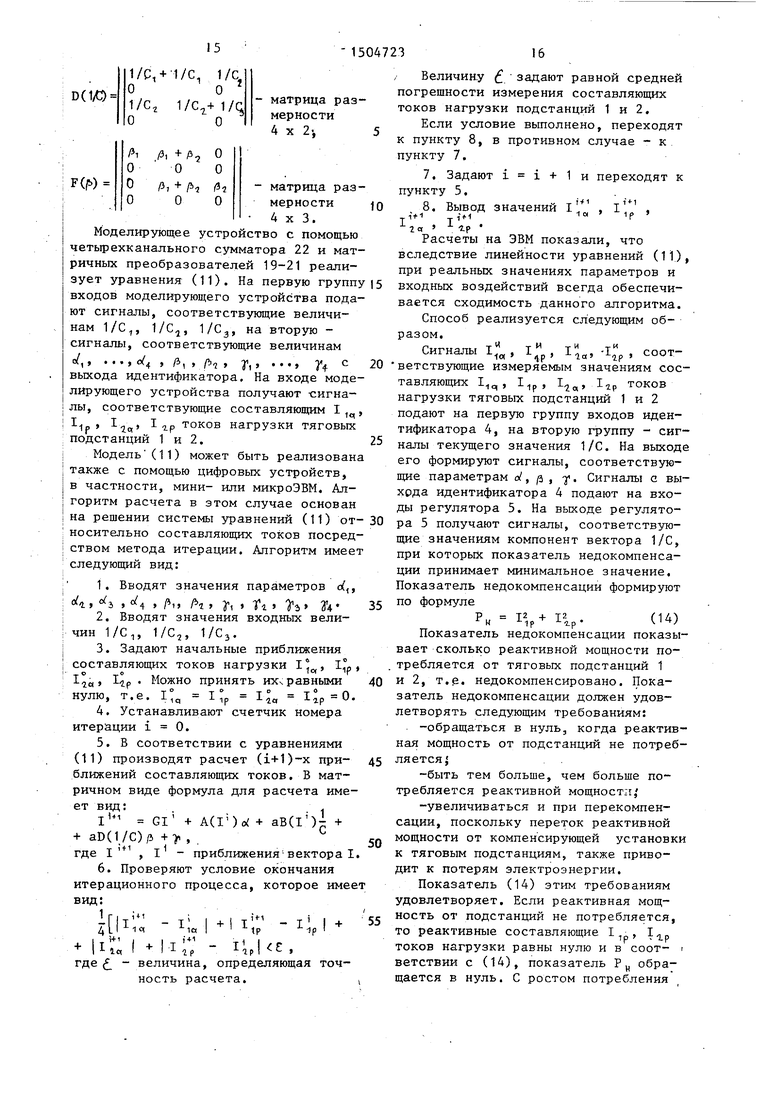
i Ь1оделирующее устройство с помощью j четырехканального сумматора 22 и матричных преобразователей 19-21 реалиРасчеты на ЭВМ показали, что вследствие линейности уравнений (11), при реальньгх значениях параметров и
зует уравнения (11). На первую группу 5 входных воздействий всегда обеспечи- входов моделирующего устройства подают сигналы, соответствующие величинам 1/С, 1/C,j, 1/С, на вторую вается сходимость данного алгоритма. Способ реализуется следующим образом,
1 Л г Т, 74
выхода идентификатора. На входе моде- i лирующего устройства получают -сигна- лы, соответствующие составляющим I ,(, 1 , lap токов нагрузки тяговых ; подстанций 1 и 2.
; Модель (11) может быть реализована : также с помощью цифровых устройств, i в частности, мини- или микроЭВМ. Ал- ; горитм расчета в этом случае основан
нагрузки тяговых подстанций 1 и 2 подают на первую группу входов идентификатора 4, на вторую группу - сигналы текущего значения 1/С. На выходе его формируют сигналы, соответствующие параметрам о/, /з , f Сигналы с выхода идентификатора 4 подают на входы регулятора 5. На выходе регулятоi на решении системы уравнений (11) от- 30 ра 5 получают сигналы, соответствуюносительно составляющих токов посредством метода итерации. Алгоритм имеет следующий вид:
1 , , 4 /
4 /
т о т - 10,
Можно принять ихч равными
составляющих токов нагрузки , Ир
га
нулю, т.е. I°q I IP .
Ui
Gl + А(1)Ы аВ(1)- +
+ аС(1/С)А +7 , ,
где 1 , 1 - приближения вектора I.
1
|1
i+i 1«
-1;«
I -I I i -ip
. IP
- i
ip
- ,
де - величина, определяющая точность расчета.
472316
Величину задают равной средней погрешности измерения составляющих токов нагрузки подстанций 1 и 2,
Если условие выполнено, переходят к пункту 8, в противном случае - к пункту 7.
10 8. Вывод значений , ,iM
Расчеты на ЭВМ показали, что вследствие линейности уравнений (11), при реальньгх значениях параметров и
I V
5 входных воздействий всегда обеспечи- входных воздействий всегда обеспечи-
вается сходимость данного алгоритма. Способ реализуется следующим образом,
И тИ -гИ
Сигналы , , , , соот- ветствующие измеряемым значениям составляющих , , , I,ip ТОКОВ
нагрузки тяговых подстанций 1 и 2 подают на первую группу входов идентификатора 4, на вторую группу - сигналы текущего значения 1/С. На выходе его формируют сигналы, соответствующие параметрам о/, /з , f Сигналы с выхода идентификатора 4 подают на входы регулятора 5. На выходе регулятора 5 получают сигналы, соответствую35
40
45
50
55
щие значениям компонент вектора 1/С, при которых показатель недокомпенса- ции принимает минимальное значение. Показатель недокомпенсации формируют по формуле
Р, 1%-н lip. (14)
Показатель недокомпенсации показывает сколько реактивной мощности потребляется от тяговых подстанций 1 и 2, т.е. недокомпенсировано. Показатель недокомпенсации должен удовлетворять следующим требованиям:
. -обращаться в нуль, когда реактивная мощность от подстанций не потребляется}
-быть тем больше, чем больше потребляется реактивной мощности,
-увеличиваться и при перекомпенсации, поскольку переток реактивной мощности от компенсирующей установки к тяговым подстанциям, также приводит к потерям электроэнергии.
Показатель (14) этим требованиям удовлетворяет. Если реактивная мощность от подстанций не потребляется,
то реактивные составляющие I
ip
токов нагрузки равны нулю и в соответствии с (14), показатель Р , обращается в нуль. С ростом потребления
реактивной мощности реактивные составляющие 1,р , Igp увеличиваются, а следовательно, увеличивается и показатель недокомпенсации Р. Переком пенсация приводит также к увеличению Р„, поскольку в соответствии с (14) он не зависит от знаков составляющих I ,р, Ijf .
Сигналы 1/С, 1/Cj, 1/Cj с выходо регулятора 5 подают на входы .АЦП 6, на выходах которого получают в цифровой форме сигналы управления U,
и и и, соответствзтощие значениям 1/С, , Г/С,, 1/Сз. Сигналы и, и и и подают на коммутируемые входы управляемого ключа 7. ЕСЛИ последний замкнут, то сигналы управления через управляемый ключ 7 поступают на ключи 16 компенсирующей установки 3 и вызывают их соответствующее переключение. Сигналы и , Uj и Uj с выходов управляемого ключа 7 через ЦАП 8 подают также на вторую группу входов идентификатора 4. ЦАП 8 предназначен для формирования сигналов 1/С , 1/С и 1/Cj, соответствующих цифровым кодам сигналов управления U., U и U.j, получаемых на вьтодах управляемого ключа 7. Если управляемый ключ 7 разомкнут, то сигналы. U, U и U не передают на ключи 16 компенсирующей установки 3 и они не переключаются.
Замыканием управляемого ключа 7 управляют с помощью сигнала разреше- ния R, который подают на управляющий вход ключа 7.
. Сигнал разрешения формируют следующим образом.
На входы формирователя 9 показа- теля недокомпенсации подают сигналы, соответствующие значениям составляющих I J , I р и на его выходе получаю сигнал, соответствующий текущему значению показателя недокомпенсации Р„, Полученный сигнал подают на третий вход устройства 10 выработки разре- щения, на первый и второй входы которого подают сигналы U j и ,U |, соответствующие величинам напряжения в тяговой сети соответственно справа и слева от компенсирующей установки 3. На первый и второй установочные входы устройства 10 выработки разрешения подают сигналы, соответствующи и максимально допустимому уровню показателя недокомпенсации, и минимально допустимому уровню напряжения в тяговой сети. На выходе устройства 10
получают сигнал разрешения R в случае, если хотя бы один из сигналов и и и окажется меньше сигнала, подаваемого на первый установочный вхо устройства 10, или если сигнал, подаваемый на третий вход зтого устройства, окажется больше сигнала на его втором установочном входе.
При наличии сигнала разрешения R управляемый ключ 7 замыкается, при отсутствии - размыкается. Таким образом, управляющие сигналы U, U и Uj подают на ключи 16 компенсирующей установки 3, если текущее значение показателя недокомпенсации Р„ превышает предельный уровень или напряжение в тяговой сети, хотя в одной из двух контролируемых точек падает ниже минимально допустимого. В противном случае управляющие сигналы не поступают на ключи 16 компенсирующей установки 3 и они не переключаются.
Таким образом, с помощью управляемого, ключа 7, формирователя 9 показателя недокомпенсации, устройства 10 выработки разрешения минимизируется количество переключений коммутирующих аппаратов компенсирующей установки путем ограничения поступающих на них управляющих воздействий. В результате исключаются малоэффективные переключения коммутирующих аппаратов компенсирующей установки. I.
Идентификатор 4 работает следующим образом.
На выходах идентификатора 4 формируют сигналы, соответствующие значениям неизвестных параметров о(, /аи -J для модели (11) регулируемого процесса. Значения параметров должны быть таковы, чтобы выходные переменные модели 1;, I.JP , и I IP имели минимальное отклонение от измеряемых выходных переменных регулируемого процесса, т.е. от величин I д I i -la одинаковых значениях входных переменных 1/С.,, 1/C.j и 1/С j и для модели, и для процесса. Степень отклонения выходных переменных модели и процесса.оценивают функцией ошибки вида:
Ij |(. - Ilc.) - (г;«- Ira)
+ (I p - i.,p).+ ( - i;p) (15)
или в матричном виде
I kl - - I, (16)
-гИ II т т тИ т
где I 1 1, 1,р 1,,„1
ар
- 4-мерный
вектор.
Подставив в (16) уравнения (12), получают
1(°(,У) tl - GI - А(1)с(- 5
-аВ(1) - aD(i)/3 -j-fx Cl - GI -A(l)o/ - аВ(1)1/С - aD(1/C)/5 -rl.
(17) 10
При равенстве выходных переменных модели и продесса функция ошибки I обрапщется в нуль и в то же время она растет с увеличением отклонения хотя бы одной выходной переменной модели 15 от выходной переменной процесса, Зна- чения параметров е , /з и -j должны быть определены из условия минимума функции ошибки I, т.е. из условия:
К ,/, у)
- mm.
о,Р. У
Для достижения минимума функции I параметры о/, /3 и у, изменяясь во времени t, должны подстраиваться таким образом, чтобы, стартуя с некоторого начального значения, они достигли значений, обеспечивающих-выполнение, условия (18). Для этого необходимо, чтобы при подстройке пара- метров происходило их движение по антиградиенту функции I, т.е. в направлении ее наиболее быстрого убы(18) 2025
30
1С(
,i:
t
I г f
I Т- ip (I 1м о
tц
S (llc( о
( - ,) - Ia«(l
-IiJ - .P
-IlJ + Ilc,(
-I-j a ) lap (IIP
га - ip
P, i (5- )(i:« - I,.) + (ll« - Ijl clt;
г г i« -Чсч p 1 - 1 l
(5: + )(1г« - Ч«) + , - I,,)dt;
ft -лi.
ri S (lie, -, Ii«)dt;
, 5 (I,p - I,p)dt;
Tr 5 (i:, - )dt;
I 4 i dap - Itp)dt,
Реализация подстройки параметров по формулам (25) осуществляется в идентификаторе 4, Основным блоком
вания (4). Тогда уравнения для параметров o((t), /i(t) и 7(t) принимают
вид: , ,
22 si. dt
(19)
(20)
(21)
d Д1, dt
Ё1 Si dt д/
Значения параметров, с которых начинается процесс подстройки, можно принять равными нулю, т.е.
0(0) о; /ь(0) О,- 7(0) О
Подставив в (19)-(21) выражение (17), и взяв частные производные, получают в матричном виде уравнения для процесса подстройки параметров:
A(l)l - 1,с (0) 0; (22) aD(1/C)l -l, р(0) 0; (2.3)
dt
dr
(24)
5i - I ) оПодставив в (22)-(24) значения матриц А и D, взяв интегралы от правой и левой частей уравнений, получают выражения для оценивания параметров в скалярном виде:
i.p)ldt;
I,p)dt;lap)dt; Iip)ldt;
(25)
идентификатора 4 (фиг.8) является моделирующее устройство 59. На входы моделирующего устройства 59, соединенные с второй группой входов идентификатора 4, подают сигналы, соответствующие величинам 1/С;,, 1/С и 1/С и на его выходах получают сигналы, соответствующие значениям I , IIP , lip которые подают на инверсные входы сумматора 60, На прямые входы сумматора 60, соединенные с первой группой входов идентифика- тора 4, подают сигналы, соответствующие разности 1 - I, Подав сигналы с выхода сумматора 60 на входы четы- рехканального интегратора 63 в соответствии с (25), на его выходах получают сигналы, соответствующие параметрам -J.,, , ,
и
rv
Для формирования подынтегральных выражений первых четырех уравнений (25) сигналы с выходов моделирующего устройства 59 и сумматора 60 подают на выходы векторного преобразователя 61, выходы которого соединены с входами четырехканального интегратора
в соответствии с первыми четырьмя уравнениями (25).
Для формирования подынтегральных выражений уравнений для р, и (ь сигналы с входов моделирующего устройства 59 и выходов сумматора 60 подаю на входы векторного преобразователя 62, выходы которого соединены с входами двухканального интегратора
о(,к+1 ti,(i;,,K)-i,jKKi;p K -i,pCK)j(t,,;-t,); с/зСк+1 (,CK) + ()(t,); .() -i jKKir i:K -i,)(t,,,-tj;
tbM(5 K - 5;fK iUK -iiaCKj).---l-y(,)j X
X (t
k+1
- tJ;
(ь,ки /., К. (--i-. - c-k. -
X (t,,, - t); ,
преобразователе 62 с помощью умножителей 80-83 и сумматоров 78, 79, 84 и 85 в соответствии с уравнениями (25) для Pf и /э,.
Сигналы, соответствующие подстраиваемым параметрам, подают с выходов интеграторов 63-65 на выходы идентификатора 4 и на вторую группу входов моделирующего устройства 59.
Идентификатор 4 может быть реализован также с помощью- цифровых устройств, в частности, мини- или мик- роЭВМ. Поскольку ЭВМ оперирует величинами, измеряемыми в дискретные моменты времени, целесообразно перейти к дискретным модификациям вьфажений (25). Тогда вьфажения для о(, принимает вид: .tK4i
20
0
5 -
5
0
(26)
где , моменты съема данных, о/, к + 1 - подстраиваемое значение параметра d(, в момент
- к-и
Поскольку параметры и составляющие токов изменяются только в моменты дискретизации и остаются постоянными на интервале t, t,, , вьфажение (26.) можно привести к виду
ГК .-
- I
с(,к + u c/,,:,4i;jK ГК1 Ск
+ I
IP
(I
1P
iKi-i ; ) (t,,,
-1).
(27)
К аналогичной форме приводятся уравнения и для остальньпх параметров:
(1;ЛК1 - )(t,i - t,); yjKl + (т рГК - I,)(tK., - tK);
ТзСкТ + ( - )(t ,„ - tK);
yjKl + (Х ДКТ - )(tK., - tK),
где к 1 - номер такта, т.е. рассматривается значение переменной в момент времени t t,.
Алгоритм расчета при реализации идентификатора 4 на ЭВМ имеет вид:
О, i 1, 2.
i,;tK, i;CKi, 1,дк, .
Входной информацией для расчета являются значения параметров с1,СК,
...,, /ь,Ск,ак1, TiCK, ...,
У4СК и входных воздействий , , .
J-i tK + 11, . .., Ji С К + 11 и производят их вывод.
Регулятор 5 работает следующим образом.
На выходах регулятора 5 формируются сигналы 1/С, l/Cj, соответствующие значениям 1/Ci, 1/С и 1/Cj, при которых показатель недоком пенсации (14) принимает минимальное значение. Выражение (14) в матричном виде:
PU
I,
(29)
где
О 1 О
о
о о о о
- матрица размерности 4x4.
В регуляторе 5 необходимо подстраивать значения 1/С,, 1/Сj таким образом, чтобы, стартуя с некото(28)
рого начального значения, они достигли величин, обеспечивающих минимум показателя Рц. Для этого необходимо подстраивать вектор 1/С в соответствии с уравнением
а.н сзо)
д(1/с)-
Начальные значения можно принять равными нулю, т.е.:
1/сЛ 0; 1/cJ. 0; 1/С.
U-0li o
0.
t o
(31)
Подставив в векторное уравнение (30) вьфажения (29) и (13) и взяв частные производные, получают следующее уравнение для процесса подстройки компонент вектора 1/С:
(1/C) -2aB QI-2aF -Q-I. (32)
Подставив в«(32) значения матриц В, Гири ВЗЯ& интегралы от правой и левой частей уравнения с учетом начальных условий, получают выражения для величин 1/С, 1/С и
35
-гр
)2dt; (33)
0
5
0
5
э
Реализация процесса подстройки по формулам (33) осуществляется в регуляторе 5 (фиг.11), основным блоком которого является моделирующее устройство 86. С его помощью, а также посредством сумматора 87, квадраторов 88-90,, трехк анальных интегратора 91 и усилителя 92 осуществляется формирование сигналов, соответствующих величинам 1/С, 1/С и 1/С, которые подают на выходы регулятора 5 и на вторую группу входов моделирующего устройства 86. В соответствии с выражениями (33) усилитель 92 является инвертирующим и имеет коэффициент передачи, равный 2а по каждому каналу. Регулятор 5 может быть реализован также с помощью ЭВМ. В этом случае целесообразно перейти к дискретным аналогам выражения (33), т.е.
Алгоритм расчета при реализации идентификатора 5 на ЭВМ имеет вид:
0.
1 1 1
сдо cjm
I, ГК, 1,.
IIP К,
IP
Г
+ с| к + ТТ
и производят их вывод.
6, Задают номер следующего такта К К + 1 и переходят к пункту 3.
АЦП 6 предназначен для формирования кодов управляющих сигналов U, Ui, и и, соответствующих величинам 1/С, 1/С и 1/С|. Он может быть pea лизован с помощью ЭВМ, В этом случае вычисляют требуемые емкости С, С и С и определяют дискретные значени емкостей конденсаторных батарей 13, 15 и 14, минимально отличающиеся от требуемых емкостей С, С и Сэ- В соответствии с найденными дискретными значениями емкостей формируют коды управляющих сигналов U, U и U.
Алгоритм расчета в этом случае имеет вид:
1
+
С К
+
+1 определенные.
в регуляторе 5.
ctCK + 1ь + cfCK + 1.
„ + 11 1,5 Cj, (35) где С; - емкость одной ступени кон- Денсаторных батарей компенсирующей установки 3 (при j 1 -рассматрива
2aI2p K(t к., - tj;
2а(1,рГК + 1,рГК)ЧСк.1 - t,); (34) 2aI|pCKKt,, - t,).
5
0
5
ется батарея 13, при j 2 - батарея 15, при j 3 - батарея 14).
О О ... 0.
При j 1 и j 3 количество разрядов сигнала U равно п, при j 2 - m, в соответствии с фиг.2. После формирования переходят к пункту 13.
Если условие (35) не выполняется, то переходят к пункту 6.
6 Устанавливают переменную цикла i 1.
JCj-CK+ 1 |С|ГК+ 1 - (i+ 1)С ,
/iCjtK + 1 4 I Cj.
(36)
30
5 0
5
0
5
9 Если условие (36) выпoлняetcя, то формируют код управляющего сигнала в виде
Uj 11 ... { 00...
После формирования U переходят к пункту 13.
на 1: i i + 1.
иГ, uf,H иГ.
ЦАП 8 предназначен для формирования обратных величин емкостей, т.е 1/С.,, 1/С и 1/Cj, соответствующих кодам управляющих сигналов U, U и Uj. ЦАП 8 может быть реализован с помощью ЭВМ. В зтом случае величины
1/С- формируют в соответствии с формулой;
1/Cj
1
1)С
j 1, 2, 3,
( +
где i - количество единиц в коде сигнала U;.
Устр ойство 10 вьфаботки разрешения функционирует следующим образом.
На пороговые устройства 96 и 97 подают сигналы U, и U с датчиков 17 и 18 напряжения. На вторые входы этих устройств подают сигнал U пр с источника 11 уставки. На выходе устройства
96формируют сигнал 1 в случае, если U , 7 и„р, а на выходе устройства
97- в случае, если U 2 TJ „f На пороговое устройство 98 подают сигнал с формирователя 9. На второй вход этого устройства подают сигнал Р Jf
с источника 12 уставки. На выходе
устройства 97 формируют сигнал 1, , Р
если Р
Сигналы с выходов пороговых устроиств подают на входы дизъюнктора 99, на выходе которого получают сигнал 1, если U, U или и„ и„„ , или Р ..
и -1 :
, eujm и - - пр
,,, - пр , -I н Т пр отив- ном случае на выходе дизъюнктора 99
t
.j -1,, ( - I,J - I,p ( - I,p)dt;
1
. S -Iip(l « - I,J + ,„ (I I,p)dt;
t
J -,«( 1C,- ,) - Iap( - lap)ldt; t
i ( (1 ao. - + J iddip -
С
H Cl SV - Ii. + 5;(C - l..)dt;
L(.)(I;«-I,«)
1
i c; c;)« - -i«) - iic.)idt;
i (i ;« - iic,)dt;
0
I
I (IIP - iip)dt;
T, S (lie, - ItJdt;
T S (IIP - Iip)dt
уравнении моделирования процесса компенсации реактивной мощности, которые
I,. ,« -d,l,, - 1,„ + а1.„- а(1,„ + 1ас,)р- + р -- + ар--+,;
1с(
1 - 1р
-1с,
1« с, 1
1« с, 1
1,Р - IIP + с7 Р г
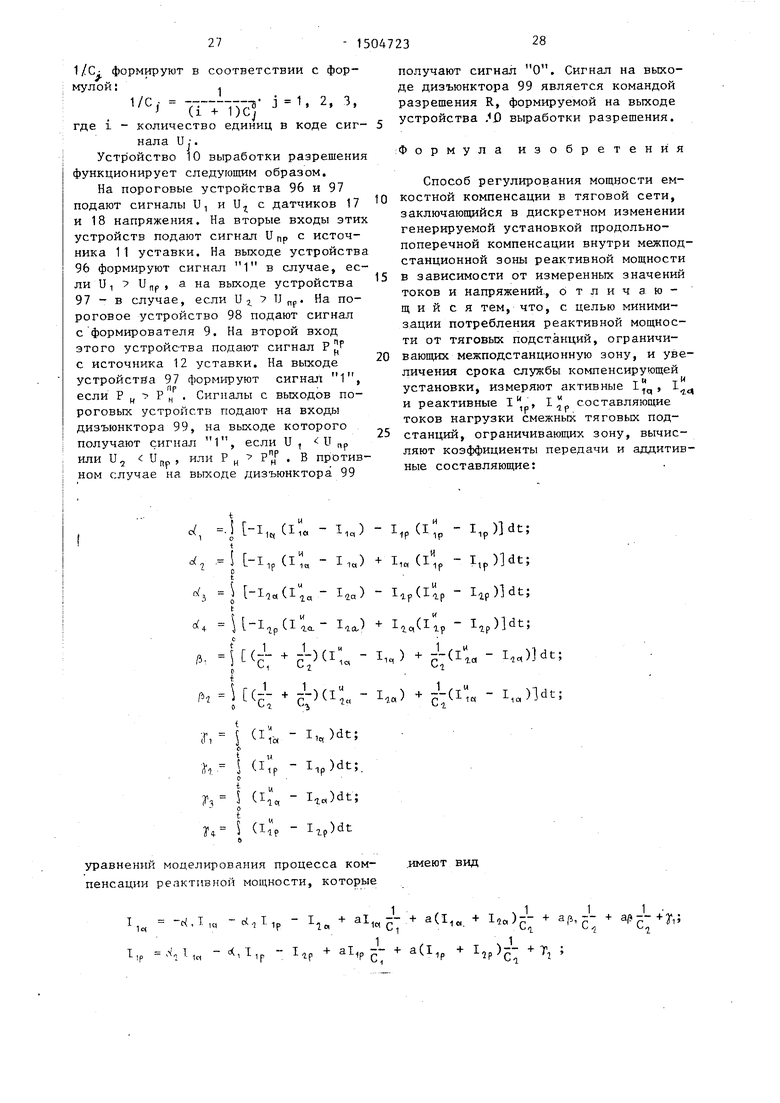
получают сигнал О, Сигнал на выходе дизъюнктора 99 является командой разрешения R, формируемой на выходе устройства .Q выработки разрешения,
:Формула изобретения
Способ регулирования мощности емкостной компенсации в тяговой сети, заключающийся в дискретном изменении генерируемой установкой продольно- поперечной компенсации внутри межпод- станционной зоны реактивной мощности в зависимости от измеренных значений токов и Напряжений., отличающийся тем, что, с целью минимизации потребления реактивной мощности от тяговых подстанций, ограничивающих межподстанционную зону, и увеличения срока службы компенсирующей установки, измеряют активные l , 1 и реактивные ,„ „ составляющие токов нагрузки смежных тяговых подстанций, ограничивающих зону, вычисляют коэффициенты передачи и аддитивные составляющие:
.имеют вид
.„-1« с, 1
с7
29
1
1,„ -I,«-,1-,„ -d, 1,р -иа1,(1, ч- I,J-- + а0, 1э
в; 3; -
,Р -IIP+0 4 Ii« - -«alzf 5 P
+ ap-- + УЭ ;
20
де o(, коэффициент передачи отрицательных обратных связей по активной и реактивной сое- 0 тавляющим тока нагрузки I, первой тяговой подстанции;
dl - коэффициент передачи перекрестных обратных связей по составляющим тока
с(з - коэффициент передачи отрицательных обратных связей по активной и реактивной составляющим тока нагрузки IJ второй тяговой подстанции,
d - коэффициент передачи перекрестных обратных связей по составляющим тока , составляющие коэффициентов
передачи по входным войдей- ствиям 1/С 1, 1/С, l/Cj} С ,, С. - емкости продольной компенсации j
С - емкость поперечной компенсации
Га -10
, I IP выходные переменные модели,
а -
u)
25
30
1
30
(1, ч- I,J-- + а0, э
F- r--1
c;
(jj - круговая частота напряжения
сети, X в - индуктивное сопротивление
реактора попере.чной компенсации)
вычисляют оптимальные величины емкостей сомпенсации . t
C-2aJ Р, dt
IP
ct
t-2a5 (I,p c; -2aJP,pdt
-b 4p)dt;
обеспечивающие наименьшее значение показателя недокомпенсации, формируемого как сумма квадратов реактивных составляющих токов нагрузки смежных тяговых подстанций, если уровень показателя недокомпенсации в текущий момент времени превьшает допустимый или уровни напряжения в заданных точках З оны падает ниже допустимого -значения, емкости компенсации устанавливаются равными тем заданным дискретным значениям, отклонение которых от оптимальных величин С, С, С минимально.
О
It GI
f i
фи..
f1
Pi Ф{4г,6
1/Ci
51
52
-)
llCt
r
1IC3
фи%, 7
55
57
53
JT
.5 f
5ff
55
Фиг.8
- a /fa f ft ifzp
ГГ J.
la
4r
l/Cr
80
78
f/Cz
-)
-
8J
ЦСз
79
Фиг.Ю
- -
8
82
83
85
Фаз 11
| Мамошин P.P | |||
| и др | |||
| Схема автоматического регулирования однофазной компенсирующей установки, работающей в режиме стабилизации напряжения.- Труды МИИТ | |||
| Вопросы электроснабжения электрических железных дорог, 1971, вып | |||
| Велосипед, приводимый в движение силой тяжести едущего | 1922 |
|
SU380A1 |
| Бородулин Б.М | |||
| и др | |||
| Конденсаторные установки электрифицированных железных дорог.- М.: Транспорт, 1983, с | |||
| Способ образования коричневых окрасок на волокне из кашу кубической и подобных производных кашевого ряда | 1922 |
|
SU32A1 |
| Способ использования делительного аппарата ровничных (чесальных) машин, предназначенных для мериносовой шерсти, с целью переработки на них грубых шерстей | 1921 |
|
SU18A1 |
