Изобретение относится к радиоизмерительной технике и может быть использовано, например, в составе компенсационного радиометра при радиоастрономических и других прецизионных измерениях мощности шумовых сигналов малого уровня на фоне помех с одновременным измерением их средней мощности.
Целью изобретения является повышение точности измерения мощности шумового сигнала на фоне узкополосных непрерывных помех путем функциональных преобразований суммарной мощност полезного и мешающего сигналов, а также суммарной мощности низкочастотных флуктуации, обусловленных полезным сигналом и его биениями с мешающим сигналом,, образующихся после де- тектирования входной смеси сигнал с шумом.
На чертеже представлена блок-схема измерителя мощности шумовых сигналов .
Устройство содержит первый детектор 1, первый интегратор 2, первый функциональный преобразователь 3 первый сумматор k, второй функциональный преобразователь 5, дополни- тельный аттенюатор 6, полосовой фильтр 7, второй детектор 8, второй интегратор 9, аттенюатор 10, второй сумматор 11, блок 12 регистрации.
При этом входом устройства явля- ется вход .первого детектора 1, последовательно соединенные полосовой фильтр 7, второй детектор 8, второй интегратор 9 и аттенюатор 10 включены между выходом детектора 1 и ин- версным входом первого сумматора k, Последовательно соединенные первый интегратор 2 и первый функциональный преобразователь 3 включены между выходом детектора 1 и прямым входом первого сумматора А, между выходом которого и вторым входом блока 12 регистрации включены последовательно соединенные второй функциональный преобразователь 5 и дополнительный аттенюатор 6. Прямой вход второго сумматора 11 подключен к выходу первого интегратора 2, инверсный вход - к выходу дополнительного аттенюатора 6, а вход - к первому входу бло- ка 12 регистрации.
Измеритель работает следующим образом.
На входе детектора 1 в общем случае действует аддитивная смесь шумового и мешающего сигналов, ширина спектра последнего FM меньше ширины спектра Ги шумового сигнала. Для нормальной работы устройства необходимо, чтобы первый 1 и второй 8 детекторы имели квадратичную характеристику, а функциональные преобразователи 3 и 5 должны реализовать функцию возведения в квадрат и извлечени квадратного корня соответственно. Нижняя Јч и верхняя fg граничные частоты полосы пропускания полосового фильтра 7 выбираются из условий fHfc fcFH и fu4 FK+ Fw, В этом случае на выходе первого детектора 1 помимо постоянной составляющей образуются также низкочастотные флуктуации, обусловленные измеряемым шумовым сигналом, мешающим сигналом и их взаимными биениями. При указанной полосе пропускания фильтра 7 на вход детектора 8 поступают только флукту.- ации, обусловленные шумовым сигналом биения его с мешающим сигналом. Поэтому постоянная составляющая на выходе детектора 8, выделяемая интег- ратором 9 пропорциональна мощности только этих флуктуации и равна (Pg + 2PWPM), в то время как постоянная составляющая на выходе первого детектора 1, выделяемая интегратором 2, пропорциональна (Рш + Рм), т.е. сумме мощностей измеряемого Рш и мешающего Рм сигналов.
Раздельное измерение Ри и Рм достигается следующим образом. Выходно напряжение интегратора 2 с помощью функционального преобразователя 3 возводится в квадрат, затем в сумматоре Ь из полученного напряжения вычитается выходное напряжение инте ратора 9 и извлекается квадратный корень с помощью функционального преобразователя 5. При настройке коэффициент передачи аттенюатора 10 подбирается так, чтобы при включенном источнике шумового сигнала и выключенном источнике мешающего сигнала напряжение на выходе сумматора А равнялось нулю. При этом аттенюатор 6 реглируется так, чтобы напряжение на выходе сумматора 11 не менялось при включении и выключении источника мешающего сигнала. В результате напряжение на первом входе Рлока 12 регистрации зависит только от мощности
5
шумового сигнала, а на втором - только от мощности мешающего сигнала, чем и достигается раздельное измерение мощности шумового и мешающего сиг налов.
154
Формула иэобрвтени
Измеритель мощности шумовых сигналов, содержащий первый сумматор, последовательно соединенные первый детектор, первый интегратор, второй сумматор и блок регистрации, второй вход которого подключен к инверсному входу второго сумматора, в также последовательно соединенные второй детектор, второй интегратор и аттенюатор, отличающийся
тем, что, с целью повышения точности
i
г
5415376
измерения на фоне узкополосных непрерывных помех, в него дополнительно введены два функциональных преобразо, вателя, второй аттенюатор и полосовой фильтр, вход которого подключен к выходу первого.детектора, а выход к входу второго детектора, вход первого функционального преобразователя
tO подключен к выходу первого интегратора, а его выход - к суммирующему входу первого сумматора, выход которого через последовательно соединенные второй функциональный преобразо1S ватель и дополнительный аттенюатор подключен к второму входу блока регистрации, при этом выход аттенюатора подключен к инверсному входу первого сумматора.
20
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для измерения интенсивности шумового сигнала | 1986 |
|
SU1370623A1 |
| Компенсационный радиометр | 1984 |
|
SU1337832A1 |
| Модуляционный радиометр | 1984 |
|
SU1195454A1 |
| ОБНАРУЖИТЕЛЬ ЭХО-СИГНАЛОВ ДВИЖУЩИХСЯ ЦЕЛЕЙ | 1984 |
|
SU1840681A1 |
| Устройство приема сигнала на фоне мощной широкополосной помехи | 1986 |
|
SU1555865A1 |
| СВЕРХВЫСОКОЧАСТОТНЫЙ РАДИОМЕТР | 2000 |
|
RU2168733C1 |
| ИЗМЕРИТЕЛЬ ШУМОВЫХ ХАРАКТЕРИСТИК СВЕРХВЫСОКОЧАСТОТНЫХ И ВЫСОКОЧАСТОТНЫХ ПЕРЕДАТЧИКОВ | 1994 |
|
RU2099729C1 |
| Адаптивное устройство подавления помех | 1990 |
|
SU1800620A1 |
| Параметрический усилитель типа М-ДМ | 1984 |
|
SU1248027A1 |
| МОДУЛЯЦИОННЫЙ РАДИОМЕТР | 1991 |
|
RU2022286C1 |
Изобретение может быть использовано в составе компенсационного радиометра при радиоастрономических и других прецезионных измерениях мощности шумовых сигналов малого уровня на фоне помех с одновременным измерением их средней мощности. Цель изобретения - повышение точности измерения мощности шумового сигнала на фоне узкополосных непрерывных помех - достигается путем функциональных преобразований суммарной мощности полезного и мешающего сигналов, а также суммарной мощности низкочастотных флуктуаций, обусловленных полезным сигналом и его биениями с мешающим сигналом, образующихся после детектирования входной смеси. Для этого в устройство введены полосовой фильтр 7, первый 3 и второй 5 функциональные преобразователи и дополнительный аттенюатор 6. На суммирующем входе первого сумматора 4 с помощью последовательно соединенных первого детектора 1, первого интегратора 2 и первого функционального преобразователя 3 формируется сигнал, пропорциональный (Pш+Pм)2, где Pш - мощность шумового, а Pм - мощность мешающего сигнала. На вычитающем входе первого сумматора с помощью последовательно соединенных полосового фильтра 7, второго детектора 8, второго интегратора 9 и аттенюатора 10 формируется сигнал, пропорциональный Pш2 + 2PшРм. Выделение сигнала, пропорционального мощности мешающего сигнала Pм, осуществляется вторым функциональным преобразователем 5 и дополни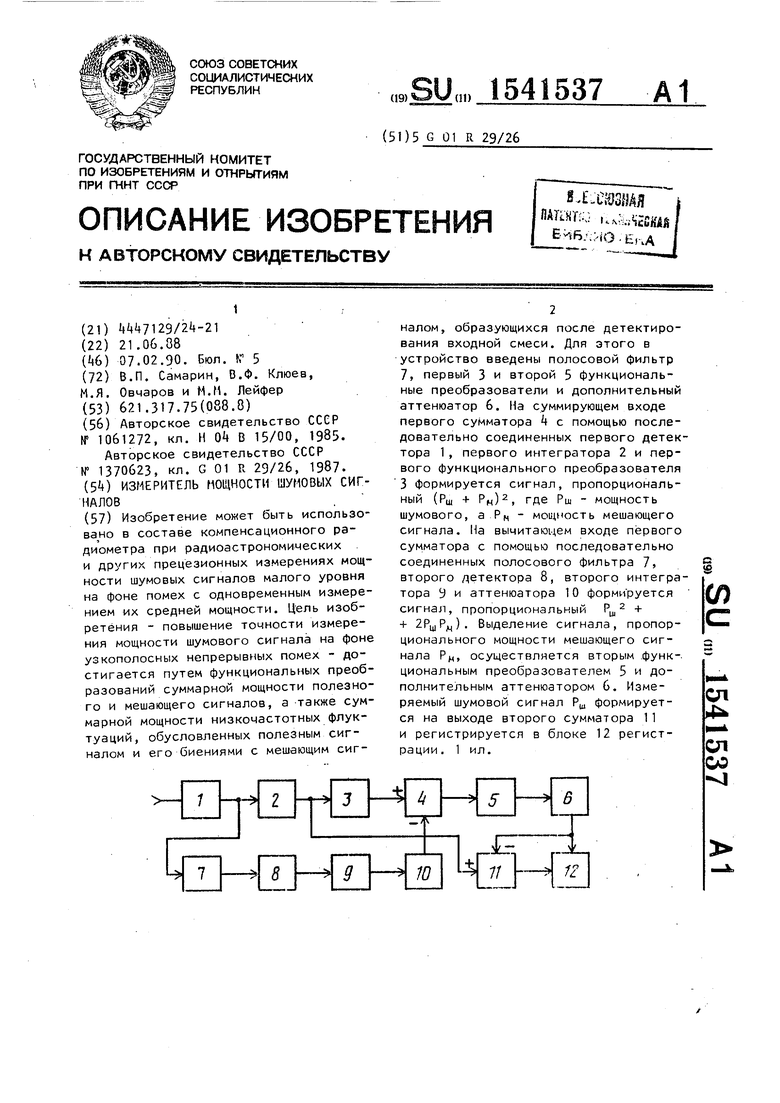
| Устройство для измерения параметров шумового сигнала | 1982 |
|
SU1061272A1 |
| Очаг для массовой варки пищи, выпечки хлеба и кипячения воды | 1921 |
|
SU4A1 |
| Устройство для измерения интенсивности шумового сигнала | 1986 |
|
SU1370623A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| ( ИЗМЕРИТЕЛЬ МОЩНОСТИ ШУМОВЫХ СИГНАЛОВ | |||
