Изобретение относится к области электротехники и может быть использовано в системах автоматического регулирования, автоматизированной контрольно-измерительной аппаратуре, машиностроении, приборостроении, особенно для тех случаев, когда требуется высокая стабильность и точность параметров механизма при многократно повторяющихся циклах работы в жестких механических и климатических условиях.
Цель изобретения - повышение надежности работы механизма.
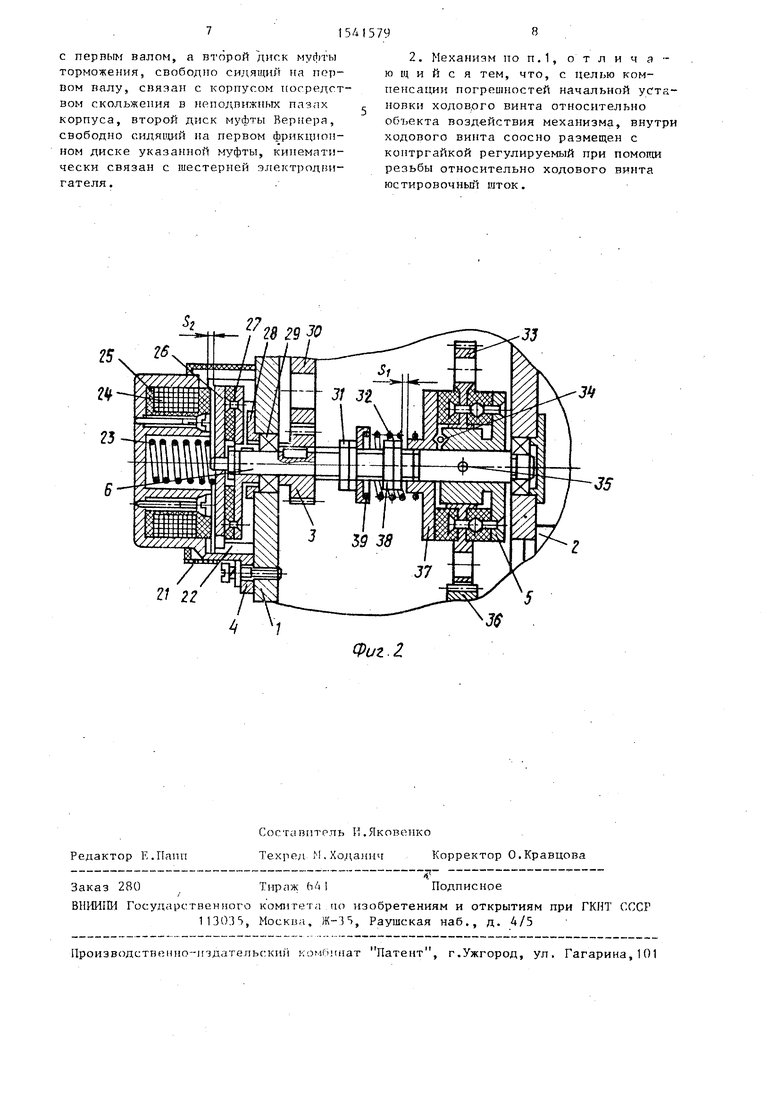
На фиг.1 дана кинематическая схема исполнительного реверсивного пря- моходного механизма; на фиг.2 - механизм, разрез по первому валу.
Механизм содержит корпус 1, элек- тродвигатель 2, зубчато-винтовой редуктор 3 (редуктор типа винт-гайка) муфту 4 торможения, муфту Вернера 5, первый вал 6 редуктора, ходовой винт
с резьбой, шестерню-гайку 8, вто- рой вал 9 редуктора, винтовую зубчатую передачу 10, валик 11, кулачЬк 12, электрические ограничители 13 и 14 хода,ручной котировочный шток 15, контргайку 16, ограничитель 17 хода, жесткие упоры 18 и 19 точного останова ходового винта с резьбой, устройство 20 стыковки котировочного винта с объектом А воздействия механизма, электроизоляционную крышку 21, направляющие пазы 22 корпуса, пружину 23, электрическую катушку 24, каркас 25 электрической катушки, второй диск (якорь) 26, первый фрикционный диск 27 муфты торможения, опорный фланец 28, подшипник 29,, шестерню 30 редуктора, гайки 31, пружины 32, второй диск 33 (шестерня) муфты Вернера, шарики 34, штифт 35, шестерню 36 электродвигателя, третий диск 37 муф- ты Вернера, гайки 38, опорный фланец 39 пружины.
На первом валу 6 редуктора 3, сопряженном кинематически с электродвигателем 2 через шестерни, размещены электромагнитная муфта 4 торможения и муфта Вернера 5. Первый фрикционный диск каждой из указанных муфт 4 и 5 жестко соединен с первым валом 6, второй диск муфты 4 торможения, свободно сидящий на том же первом валу 6, связан с корпусом 1 механизма посредством скольжения в неподвижных пачах корпуса муфты 4, жестко
Q
5
Q
5 0 , 45
5
соединенного корпусом 1, в cffOTO очередь второй диск муфты Вернера 5, свободно сидящий на первом фрикционном диске указанной муфты 5, кинематически взаимосвязан с шетерней электродвигателя 2, при этом второй вал 9 редуктора 3, сопряженный при помощи зубчатого зацепления с первым валом 6 и шестерней-гайкой 8, дополнительно связан через винтовую зубчатую передачу 10, валик 11 и регулируемый относительно указанного валика 11 кулачок 12 с электрическими ограничителями 13 и 14 хода. Жесткий ограничитель 17 хода ходового винта 7 расположен в пазу корпуса 1 по подвижной посадке между двумя жесткими упорами 18 и 19, установленными на заданную точную величину хода ходового винта 7, причем внутри винта 7 соосно с контргайкой 16 размещен регулируемый за счет резьбы вдоль оси винта 7 котировочный шток 15 компенсации погрешностей начальной установки ходового винта 7 относительно объекта А, в передней части котировочного штока 15 находится устройство 20 стыковки, сопряженное неподвижно с котировочным штоком 15.
Механизм работает следующим образом.
Предварительно перед работой производится сборка и стыковка указанного механизма с объектом воздействия А. Ручным вращением котировочного штока 15 подводится устройство 20 стыковки к рабочей поверхности объекта А до положения, когда между рабочими поверхностями объекта А и устройством стыковки возникает без- заэорный контакт (зазор равен 0 мм). В этом вр.емя ограничитель 17 винта должен находиться без зазора на упоре 18, а кулачок 12 упором на электрическом ограничителе 13. Далее вручную контрится контргайкой 16 котировочный шток 15 с целью устранения возможности изменения его положения относительно ходового винта 7, механически (в случае надобности) соединяется при помощи элементов крепления устройство 20 с рабочей поверхностью объекта А.
Механизм занимает исходное положение перед включением (согласно фиг.Г в режиме автоматической работы. Для перемещения винта 7, например справа налево, подается электрическое питание на электродвигатель 2, который через муфту 5 передает заданный предельный момент вращения на шестерни редуктора 3 и на шестерню-гайку 8. Вращение шестерни-гайки 8 преобразуеся в поступательное движение винта 7 со штоком 15, так как его ограничитель 17 расположен между жесткими упорами 18 и 19 в пазу по скользящей посадке, а сама шестерня-гайка 8, сопрягаясь по ходовой винтовой передаче с винтами 7, конструктивно не имеет осевого перемещения.
Перемещаясь вдоль своей оси с юс- тировочным штоком 15, винт 7 воздействует на рабочую поверхность объекта А с жестко заданным усилием на всей величине хода винта. Это усилие стабильно повторяется в каждом цикле в жестко нормированных пределах, обеспеченных кинематикой механизма. В конце хода винта 7 кулачок 12 наталкивается на электровыключатель 14, который изменяет полярность электрического питания электродвигателя 2. В результате элек родвигатель получает мгновенный динамический тормозной импульс от попытки вращения ротора электродвигателя в другую сторону. Затем снимается электрическое питание с электродвигателя и одновременно подается соответствующее электрическое питание на муфту 4 торможения . Муфта 4 торможения гасит инерционное вращение редуктора 3 и затормаживает через него винт 7 со штоком 15, а муфта 5 в случае инерционного вращения электродвигателя 2 кинематически разъединяет электродвигатель 2 от редуктора 3. Под действием остаточных инерционных сил вращения редуктора ограничитель 17 наталкивается на жесткий упор 19, винт 7 со штоком 15 останавливается окончательно на заданную точную величину хода. При этом исключается винтовое заклинивание винта 7 и шестерни-гайки 8, поскольку муфта 4 торможения и упор 19 погасили движение винта 7, а муфта Вернера проскальзыванием своего подвижного диска кинематически разъединила вал 6 от инерционного вращения электродвигателя 2. Далее снимается электрическое питание с муфты 4 и механизм занимает состояние покоя, а винт - заторможенное положение, поскольку он взаимосвязан с шестерней-гайкой самотормозящей винтовой поверхностью. Работа механизма при перемещении винта со штоком слева направо аналогична работе механизма при перемещении винта со штоком справа налево с той же лишь разницей, что срабатывает электровыключатель 13 и ограничитель 17 наталкивается
на упор 18. При работе механизма в автоматическом режиме винт 7 возвращается в исходное первоначальное положение в механизме, поскольку работа механизма может обеспечиваться
5 схемой автоматического управления по заданной программе.
Механизм позволяет значительно повысить стабильность величины хода и усилия выходного элемента - ходово0 го винта, устраняет эффект мертвого винтового заклинивания винта в передаче винт-гайка в конце движения при наталкивании ограничителя на жесткие упоры точного хода. Кроме того, в
5 случае неисправности или возникновения поломки объекта воздействия механизма, которое может выражаться в повышении величины сопротивления винта со штоком или невозможности даль0 нейшего перемещения винта, механизм прекращает перемещение ходового винта за счет проскальзывания муфты Вернера.
5
0
5
0
5
Формула изобретения
1. Исполнительный реверсивный прямоходный механиз.м, содержащий корпур, электродвигатель, установленный на валу редуктора типа винт- гайка, ходовой винт которого имеет жесткий ограничитель хода, сопряженный с пазами в корпусе, и электрический ограничитель хода ходового винта, отличающийся тем, что, с целью повышения надежности работы механизма, редуктор содержит два вала, на первом валу редуктора, кинематически сопряженном через шестерни с электродвигателем, размещены электромагнитная муфта торможения ходового винта и муфта Вернера, второй вал редуктора, сопряженный через шестерни с первым валом и ходовым винтом, связан через винтовую зубчатую передачу, валик и регулируемый относительно валика кулачок с электрическим ограничителем хода ходового виьта, причем первый фрикционный диск каждой из муфт жестко соединен
с первым валом, а второй диск муфты торможения, свободно сидящий на первом налу, связан с корпусом посредством скольжения в неподвижных плчлх корпуса, второй диск муфты Вернера, свободно сидящий на первом фрикционном диске указанной муфты, кинематически связан с шестерней электродвигателя .
2. Механизм по п. 1, о т л и ч а - ю щ и и с я тем, что, с целью компенсации погрешностей начальной установки ходоврго винта относительно объекта воздействия механизма, внутри ходового винта соосно размещен с контргайкой регулируемый при помощи резьбы относительно ходового винта котировочный шток.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ ПЛЮЩЕНИЯ ЗУБЬЕВ ПИЛ | 1990 |
|
RU2036056C1 |
| СТЕНД СБОРКИ ОБТЕКАТЕЛЯ ИЗДЕЛИЯ, ВЕРХНИЙ КОРСЕТ СТЕНДА, НИЖНИЙ КОРСЕТ СТЕНДА, МЕХАНИЗМ ПОПЕРЕЧНОГО ПЕРЕМЕЩЕНИЯ СТЕНДА СБОРКИ ОБТЕКАТЕЛЯ ИЗДЕЛИЯ, МЕХАНИЗМ ПРОВОРОТА СТЕНДА СБОРКИ ОБТЕКАТЕЛЯ ИЗДЕЛИЯ, ПОДЪЕМНЫЙ МЕХАНИЗМ СТЕНДА СБОРКИ ОБТЕКАТЕЛЯ ИЗДЕЛИЯ, ХОДОВАЯ ОПОРНАЯ ТЕЛЕЖКА СТЕНДА СБОРКИ ОБТЕКАТЕЛЯ ИЗДЕЛИЯ, СПОСОБ СБОРКИ ОБТЕКАТЕЛЯ НА СТЕНДЕ | 2008 |
|
RU2392201C1 |
| УСТРОЙСТВО ДЛЯ ФОРМОВАНИЯ БЕТОННЫХ ИЗДЕЛИЙ | 2009 |
|
RU2405672C1 |
| Устройство для установки труб в трубные решетки теплообменников | 1983 |
|
SU1186452A1 |
| Винтовой пресс | 1989 |
|
SU1646892A1 |
| Устройство для намотки магнитопровода | 1990 |
|
SU1835095A3 |
| МЕХАНИЗМ ВОЗВРАТНО-ПОСТУПАТЕЛЬНОГО ПЕРЕМЕЩЕНИЯ | 1991 |
|
RU2020545C1 |
| РЕГУЛИРУЕМЫЙ ВЕНТИЛЯТОР АППАРАТА ВОЗДУШНОГО ОХЛАЖДЕНИЯ | 2000 |
|
RU2183290C2 |
| ПОДЪЕМНЫЙ МЕХАНИЗМ ОРУЖИЯ БАШЕННОЙ УСТАНОВКИ | 2011 |
|
RU2484410C1 |
| ВИНТОВОЙ СТРЕЛОЧНЫЙ ЭЛЕКТРОПРИВОД С ВНУТРЕННИМ ЗАМЫКАНИЕМ ШИБЕРА | 1998 |
|
RU2181679C2 |
Изобретение относится к области электромеханики и может быть использовано в системах автоматического регулирования, машиностроении, приборостроении. Цель изобретения - повышение надежности работы механизма. В исполнительном реверсивном прямоходном механизме на первом валу 6 редуктора размещены муфта 4 торможения и муфта Вернера. Вал 6 сопряжен кинематически с электродвигателем 2. Второй вал 9 редуктора сопряжен с помощью зубчатого зацепления с первым валом и шестерней-гайкой 8, а также через передачу 10, валик 11 и кулачок 12 с электрическими ограничителями 13 и 14 хода. Внутри ходового винта 7 соосно размещен с контргайкой 16 юстировочный шток 15. Механизм позволяет значительно повысить стабильность величины хода и усилия выходного элемента-ходового винта, устраняет эффект мертвого винтового заклинивания. 1 з.п. ф-лы, 2 ил.
2,28 29 Ж
2/ 22
Фиг. Z
| Рощин Г.И | |||
| Конструирование механизмов радиоэлектронной аппаратуры | |||
| - М.: Высшая школа, 1973, с.297-301 | |||
| Исполнительный прямоходный механизм | 1981 |
|
SU1022135A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
