Изобретение относится к радиотехнике, в частности к приводным устройствам для ориентирования антенн.
Известен механизм возвратно-поступательного перемещения [1], содержащий приводной двигатель, редуктор и ходовой винт с ходовой гайкой. Ходовой винт служит для вертикального возвратно-поступательного перемещения центральной оси симметрии параболической антенны.
Этот механизм не может быть применен для поворота антенны спутникового телевидения, поскольку подвижным элементом в нем является ходовой винт при вращающейся в опорах ходовой гайке. В этом случае резьба винта при выходе из ходовой гайки оказывается не защищенной от воздействия окружающей среды (пыль, грязь, насыщающая смазку), что может привести к ненадежной работе кинематической пары ходовой винт - гайка и, как следствие, к снижению точности позиционирования.
Известен механизм возвратно-поступательного перемещения для поворота антенны спутникового телевидения [2], содержащий приводной двигатель, редуктор, на выходном валу которого закреплен ходовой винт с ходовой трубчатой гайкой, датчик и блок управления.
Известный механизм не обладает достаточной надежностью и точностью позиционирования. Это обусловлено тем, что антенна спутникового телевидения в конкретном месте ее расположения настраивается на различные орбитальные спутники путем анализа количества импульсов датчика относительно так называемого механического нуля. Механический нуль определяется в крайних положениях ходовой гайки и ходового винта, т.е. при заклинивании винтовой пары. При этом происходит смятие резьбы в пределах пластической деформации и для реверсирования механизма требуется значительный пусковой момент на приводном двигателе. При повторении этой операции пусковой момент на двигателе при реверсировании еще более возрастает и может превысить допустимые пределы, механизм выходит из строя, так как при повторных заклиниваниях происходит прирабатывание трущихся поверхностей винтовой пары. Поэтому в инструкциях по настройке известных механизмов фирм Allsat, Kathrein (ФРГ) и т. п. разрешено лишь однократное заклинивание механизма для разового определения механического нуля. Но не только этим явлением чревато неоднократное заклинивание механизма. При пластической деформации резьбы, величина которой для каждого конкретного привода носит случайный характер, неизбежно снижается точность позиционирования, так как остановка ходового винта и, следовательно, связанного с ним оптоэлектронного датчика производится при различных угловых положениях последнего, т.е. механический ноль оказывается плавающей величиной, что и приводит к потере точности позиционирования, внося трудно учитываемую заранее погрешность. Это вынуждает потребителя в лучшем случае корректировать положения антенны, а в худшем (в случае выхода из строя двигателя) менять механизм целиком. В реальных условиях эксплуатации, однако, периодически возникает необходимость повторного определения механического нуля, например в случае потери информации в блоке управления. Кроме того, используемый оптоэлектронный датчик кроме общеизвестных трудностей по формированию фронтов импульсов счета не обеспечивает достоверного считывания сигналов из-за влияния на его работу оптических характеристик окружающей среды, в которой присутствуют частицы масла, пыли и т.п.
Цель изобретения - повышение надежности и точности позиционирования.
Цель достигается тем, что механизм возвратно-поступательного перемещения преимущественно для антенн спутникового телевидения, содержащий приводной двигатель с валом, сопряженный с редуктором, на выходном валу которого закреплены ходовой винт с ходовой трубчатой гайкой, датчик поворота винта, а также блок управления, выходы которого соединены с входом двигателя, а вход - с выходом датчика, снабжен размещенной на свободном конце ходового винта втулкой с упорами на противоположных торцах и предохранительной муфтой, установленной на валу двигателя, при этом трубчатая гайка снабжена упорами, установленными с возможностью взаимодействия с упорами втулки, а датчик поворота винта выполнен в виде кольцевого магнита со смещенными звездообразными полюсными наконечниками и магнитоуправляемого элемента, расположенного перпендикулярно плоскости вращения полюсных наконечников.
Соответствие заявляемого технического решения критерию "существенные отличия" доказывается тем, что благодаря признакам, отличающим это решение от прототипа, устройство приобрело новое свойство, а именно возможность во всем диапазоне позиционирования ходовой трубчатой гайки исключить сбой механического нуля (начало отсчета датчиком электрических импульсов). Указанное свойство, обуславливающее достижение цели (повышение надежности и точности позиционирования), отсутствует у всех других устройств аналогичного назначения.
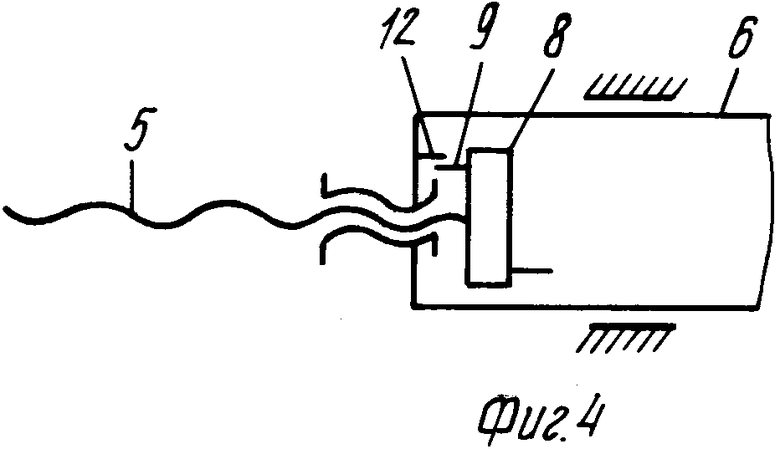
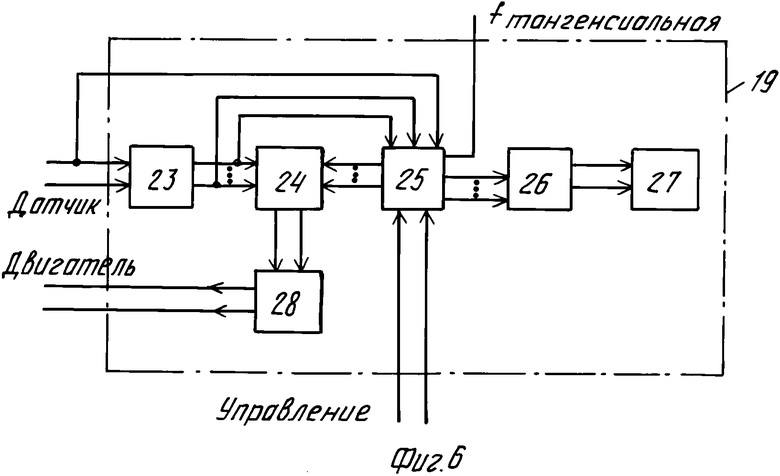
На фиг. 1 изображена схема механизма; на фиг. 2 и 3 датчик; на фиг. 4 и 5 - крайнее правое и крайнее левое положения ходовой трубчатой гайки соответственно; на фиг. 6 - схема блока управления.
Механизм возвратно-поступательного перемещения содержит приводной двигатель 1, редуктор, составленный из зубчатых колес 2, 3, 4, на выходном валу которого закреплены ходовой винт 5 с ходовой трубчатой гайкой 6 и датчик 7 поворота винта. На свободном конце ходового винта 5 размещена втулка 8 с упорами 9 и 10 на противоположных торцах. На валу приводного двигателя 1 установлена предохранительная муфта 11, а трубчатая гайка 6 снабжена упорами 12 и 13, установленными с возможностью взаимодействия с упорами 9 и 10 втулки 8. Датчик 7 выполнен в виде кольцевого магнита 14 со смещенными звездообразными полюсными наконечниками 15 и 16 и магнитоуправляемого элемента 17, расположенного перпендикулярно плоскости вращения полюсных наконечников 15, 16. Трубчатая гайка 6 на конце имеет шток 18, закрепляемый на антенне спутникового телевидения (на фигурах не показана). Приводной двигатель 1 и магнитоуправляемый элемент 17 электрически соединены с блоком 19 управления. Предохранительная муфта 11 имеет конический диск 20, посредством пружины 21 и гайки 22 прижимаемый к зубчатому колесу 2.
Блок 19 управления содержит счетчик 23, вход которого является входом блока 19 управления, а выходы соединены с первыми входами блока 24 сравнения и информационными входами блока 25 памяти. Информационные выходы последнего соединены с вторыми входами блока 24 сравнения и через дешифратор 26 с входами индикатора 27. Выходы блока 24 сравнения соединены с входами блока 28 реле, выходы которого являются выходами блока 19 управления. Управляющие входы счетчика 23 и блока 25 памяти соединены с клеммой управления. Другие управляющие входы блока 25 памяти соединены с шинами выбора объекта настройки, а тактовый вход соединен с клеммой тактового сигнала. В качестве магнитоуправляемого элемента может быть использован элемент 1116КП8.
Механизм работает следующим образом.
Шток 18 закрепляют на антенне. Трубчатая гайка совершает возвратно-поступательное перемещение при вращении ходового винта 5, а сам механизм возвратно-поступательного перемещения фиксируют на неподвижном лафете (на фигурах не показан).
За нулевую точку отсчета электрических импульсов датчика 7 принимается такое крайнее положение штока 18, когда упор 9 втулки 8 взаимодействует с упором 12 трубчатой ходовой гайки 6 либо упор 10 втулки 8 взаимодействует с упором 13 гайки 6 (фиг. 4).
Работа механизма при начальном взаимодействии упоров 10 и 13 (фиг. 5). Блок 19 управления формирует питающее напряжение на приводной двигатель 1, вращение от которого через предохранительную муфту 11 и колеса 2, 3, 4 редуктора передается ходовому винту 5. При вращении винта 5 ходовая гайка 6 перемещается влево (в сторону редуктора) до левого крайнего положения, при котором упор 13 взаимодействует с упором 10 втулки 8. При вращении ходового винта 5 вращается и датчик 7, при этом магнитоуправляемый элемент 17 выдает на блок 19 управления электрические импульсы, по количеству которых определяется взаимное положение винта 5 и гайки 6, т.е. суммарная длина штока 18, соответствующая угловому положению антенны.
По достижении механического нуля элементы блока 19 управления обнуляются. При поступлении сигналов управления на блок 25 памяти выдается код, соответствующий заданному положению штока 18 в блок 24 сравнения, на другие входы которого поступает текущая информация со счетчика 23, подсчитывающего импульсы с датчика 7. В зависимости от выходной информации с блока 24 сравнения блок 28 реле вырабатывает сигналы движения (вправо-влево) или торможения двигателя 1. Одновременно сигналы с блока 25 памяти через дешифратор 26 поступают на индикатор 27, где отражается информация о положении штока 18, соответствующая номеру спутника и количеству импульсов от механизма перемещения, при котором обеспечивается точная настройка на спутник телевизионного вещания, запоминается в блоке 19 управления, и в дальнейшем поиск необходимого спутника осуществляется автоматически. В момент точной настройки на спутник блок 19 управления выдает команду торможения двигателя (снятие управляющего напряжения). В крайних положениях штока 18 в момент взаимодействия упоров 9 и 12 или 10 и 13 ходовой винт 5 играет роль торсиона, закручиваясь на определенный угол, воспринимая момент инерции всех участвующих во вращении элементов конструкции, т.е. упругая деформация винта 5 предохраняет весь механизм редуктора от ударных нагрузок при остановке. При этом не происходит заклинивания винтовой пары и усилие от момента инерции воспринимается упорами 9, 10, 12, 13, которые даже в случае пластической деформации соприкасающихся поверхностей не вносят погрешности в угловое положение датчика 7, т.е. повышается точность отсчета. Кроме того, такое конструктивное решение позволяет уменьшить пусковой момент при реверсировании двигателя и сделать механизм более надежным. Защиту двигателя 1 от перегрузки обеспечивает и предохранительная муфта 11, устраняющая также влияние момента инерции ротора двигателя 1 на ходовой винт 5 в момент его остановки от взаимодействия упоров 9, 12 или 10, 13.
Таким образом, использование данного механизма обеспечивает по сравнению с известными устройствами повышенную надежность и точность позиционирования, что обусловлено отсутствием заклинивания ходовой трубчатой гайки в крайних положениях, благодаря чему обеспечена стабильность положения механического нуля, устранением влияния момента инерции ротора двигателя благодаря предохранительной муфте, которая к тому же защищает двигатель от перегрузок, независимостью работоспособности датчика от состояния окружающей среды, достигнутой за счет использования магнита и выбора формы полюсных наконечников.
По сравнению с базовым объектом, в качестве которого принят привод фирмы Kathrein (ФРГ), точность повышена на 0,4 мм по перемещению или на 0,2о по углу на антенне.
Механизм возвратно-поступательного перемещения планируется к использованию в опорно-поворотном устройстве антенны спутникового телевидения.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ПЕРЕМЕЩЕНИЯ АНТЕННЫ | 2015 |
|
RU2610519C1 |
| Устройство для лужения | 1990 |
|
SU1743748A1 |
| Автоматическая линия для нанесения гальванических покрытий | 1989 |
|
SU1696612A1 |
| Опорно-поворотное устройство для антенны спутникового телевидения | 1990 |
|
SU1809477A1 |
| Тележка для перевозки штучных грузов | 1985 |
|
SU1348253A1 |
| Устройство для измерения линейных размеров | 1987 |
|
SU1397697A1 |
| Устройство для гальванохимическойОбРАбОТКи дЕТАлЕй | 1979 |
|
SU846605A1 |
| СКВАЖИННЫЙ ПРОФИЛЕМЕР | 2008 |
|
RU2382880C1 |
| РЕГУЛИРУЕМЫЙ ВЕНТИЛЯТОР АППАРАТА ВОЗДУШНОГО ОХЛАЖДЕНИЯ | 2000 |
|
RU2183290C2 |
| ПНЕВМАТИЧЕСКИЙ ПРИВОД | 2004 |
|
RU2464451C2 |



Изобретение относится к радиотехнике, в частности к приводным устройствам для ориентирования антенн. Цель изобретения - повышение надежности и точности позиционирования. Механизм включает приводной двигатель 1, колеса 2, 3, 4 редуктора, ходовой винт 5 с ходовой гайкой 6 и датчик 7. Ходовой винт 5 имеет втулку 8 с упорами 9 и 10 на противоположных торцах. На валу двигателя 1 установлена муфта 11, а гайка 6 снабжена упорами 12 и 13, установленными с возможностью взаимодействия с упорами 9 и 10 втулки 8. Датчик 7 выполнен в виде кольцевого магнита 14 со звездообразными полюсными наконечниками 15, 16 и магнитоуправляемого элемента 17. Трубчатая гайка 6 на конце имеет шток 18. Двигатель 1 соединен с блоком 19 управления. Муфта 11 имеет конический диск 20, пружиной 21 и гайкой 22 прижимаемый к колесу 2. 6 ил.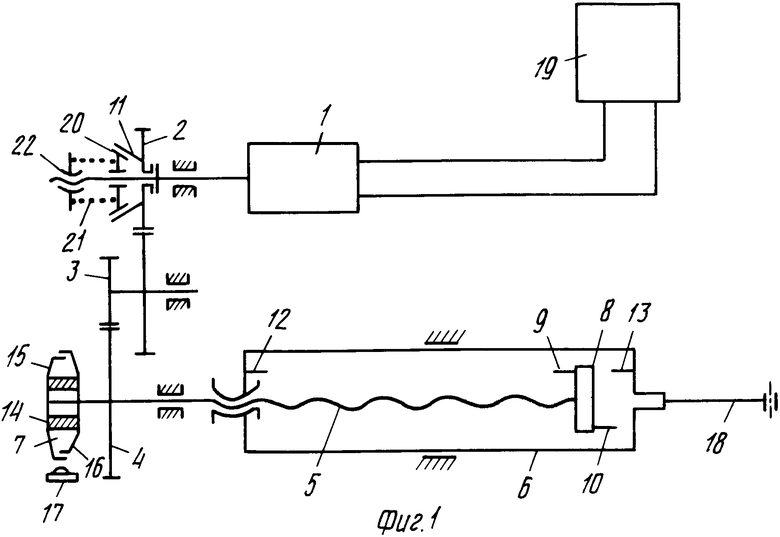
МЕХАНИЗМ ВОЗВРАТНО-ПОСТУПАТЕЛЬНОГО ПЕРЕМЕЩЕНИЯ, содержащий приводной двигатель с валом, сопряженный с редуктором, на выходном валу которого закреплены ходовой винт с ходовой трубчатой гайкой и датчик поворота винта, а также блок управления, выходы которого соединены с входами двигателя, а вход - с выходом датчика, отличающийся тем, что, с целью повышения надежности и точности позиционирования, он снабжен размещенной на свободном конце ходового винта втулкой с упорами на противоположных торцах и предохранительной муфтой, установленной на валу двигателя, трубчатая гайка снабжена упорами, установленнми с возможностью взаимодействия с упорами втулки, а датчик поворота винта выполнен в виде кольцевого магнита со смещенными звездообразными полюсными наконечниками и магнитоуправляемого элемента, расположенного перпендикулярно плоскости вращения полюсных наконечников.
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Каталог фирмы Allsat, ФРГ, 1989. | |||
