ходном положении шипы кривошипов 4 и 5, кинематически связанных с поворотным ведомым звеном 3, находятся на максимальном расстоянии друг от друга, и точки закрепления упругого элемента 8 на шипах лежат на прямой, проходящей через оси обоих кривошипов. В этом положении зуб фиксатора 9 находится в зацеплении с зубчатым венцом кривошипа 4, двигатель 1 выключен, а сам привод находится в положении неустойчивого равновесия. Для перевода инструментального диска 12 в следующую рабочую позицию он отводится от корпуса 13 и подаются команды на включение Ликсатора 9 и включение двигателя 1, обеспечивающего поворот звена 3, вала 11 и диска
2 в требуемом направлении„ 2 зсп„ ф-лы, 4 ил.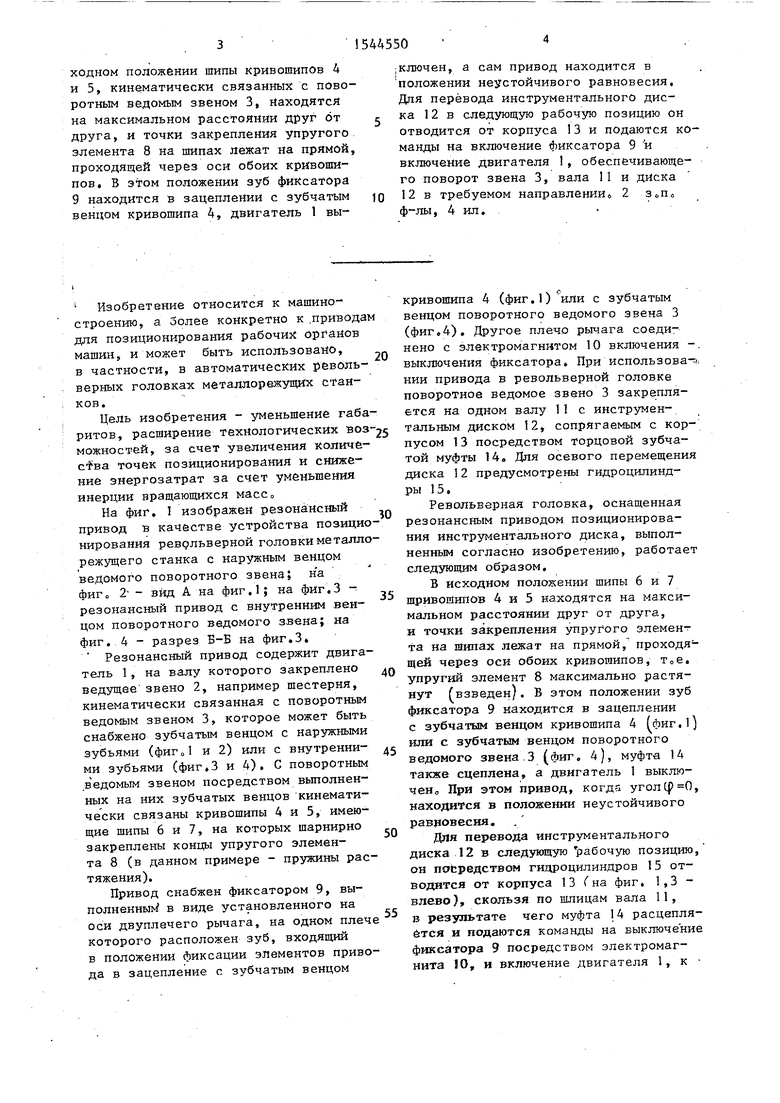
| название | год | авторы | номер документа |
|---|---|---|---|
| Револьверная головка | 1990 |
|
SU1787697A1 |
| Резонансный привод | 1986 |
|
SU1357219A1 |
| Автоматическая револьверная головка металлорежущего станка | 1980 |
|
SU944803A1 |
| Револьверный суппорт токарного автомата | 1981 |
|
SU992124A1 |
| Револьверная головка | 1989 |
|
SU1683881A1 |
| Револьверная головка | 1983 |
|
SU1161263A1 |
| АВТОМАТИЧЕСКАЯ РЕВОЛЬВЕРНАЯ ГОЛОВКА | 1990 |
|
RU2035268C1 |
| МНОГОПОЗИЦИОННАЯ ИНСТРУМЕНТАЛЬНАЯ ГОЛОВКА | 1992 |
|
RU2071870C1 |
| Автоматическая револьверная головка | 1978 |
|
SU774812A1 |
| АВТОМАТИЧЕСКАЯ РЕВОЛЬВЕРНАЯ ГОЛОВКА | 1993 |
|
RU2051012C1 |
Изобретение относится к машиностроению, к приводам для позиционирования рабочих органов машин, и может быть использовано, в частности в автоматических револьверных головках металлорежущих станков. Целью изобретения является уменьшение габаритов, расширение технологических возможностей за счет увеличения количества точек позиционирования и снижения энергозатрат за счет уменьшения инерции вращающихся масс. В исходном положении шипы кривошипов 4 и 5, кинематически связанных с поворотным ведомым звеном 3, находятся на максимальном расстоянии друг от друга, и точки закрепления упругого элемента 8 на шипах лежат на прямой, проходящей через оси обоих кривошипов. В этом положении зуб фиксатора 9 находится в зацеплении с зубчатым венцом кривошипа 4, двигатель 1 выключен, а сам привод находится в положении неустойчивого равновесия. Для перевода инструментального диска 12 в следующую рабочую позицию он отводится от корпуса 13 и подаются команды на включение фиксатора 9 и включение двигателя 1, обеспечивающего поворот звена 3, вала 11 и диска 12 в требуемом направлении. 2 з.п. ф-лы, 4 ил.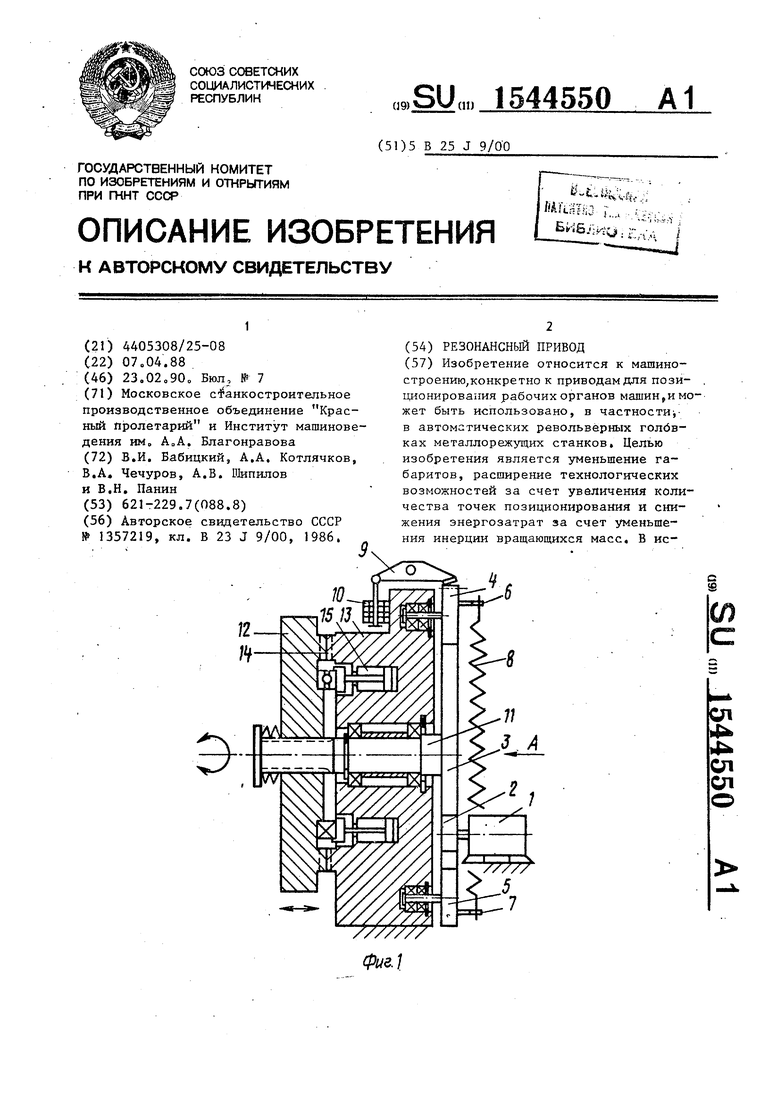
Изобретение относится к машиностроению, а Золее конкретно к привода для позиционирования рабочих органов машин, и может быть использовано, в частности, в автоматических револьверных головках металлорежущих станков.
Цель изобретения - уменьшение габаритов, расширение технологических воз можностей, за счет увеличения количества точек позиционирования и снижение энергозатрат за счет уменьшения инерции вращающихся масс
На фиг. 1 изображен резонансный привод в качестве устройства позицио нирования револьверной головки металлорежущего станка с наружным венцом
i.J
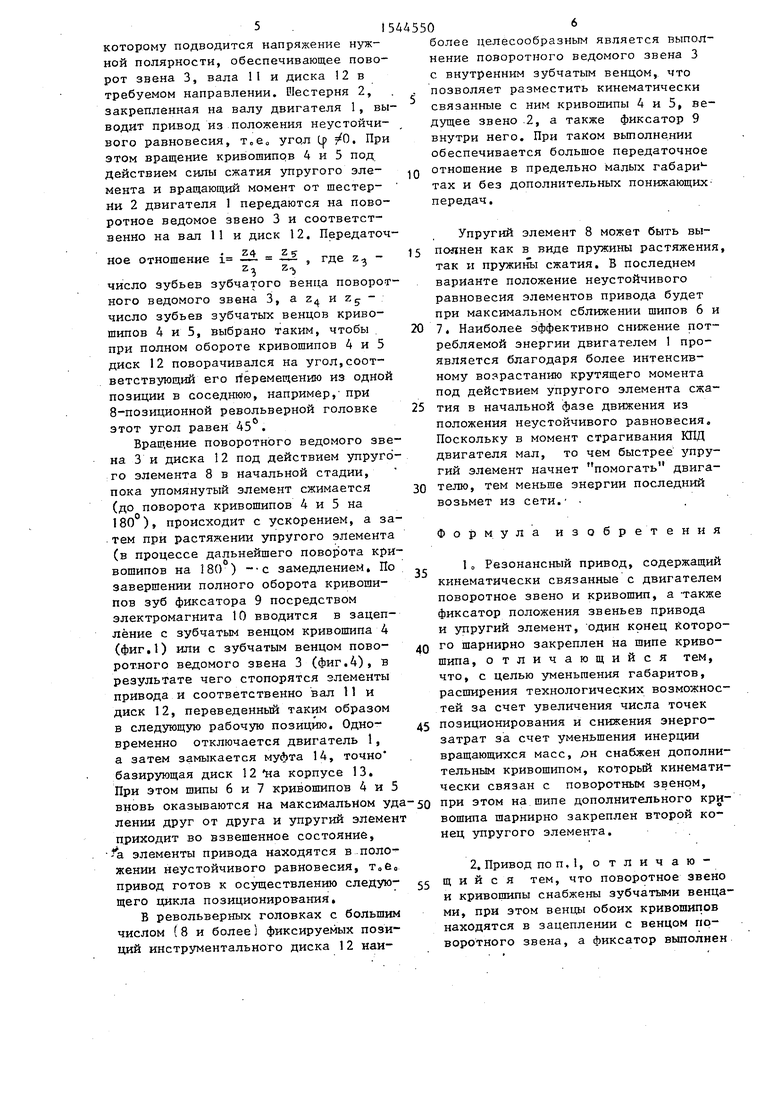
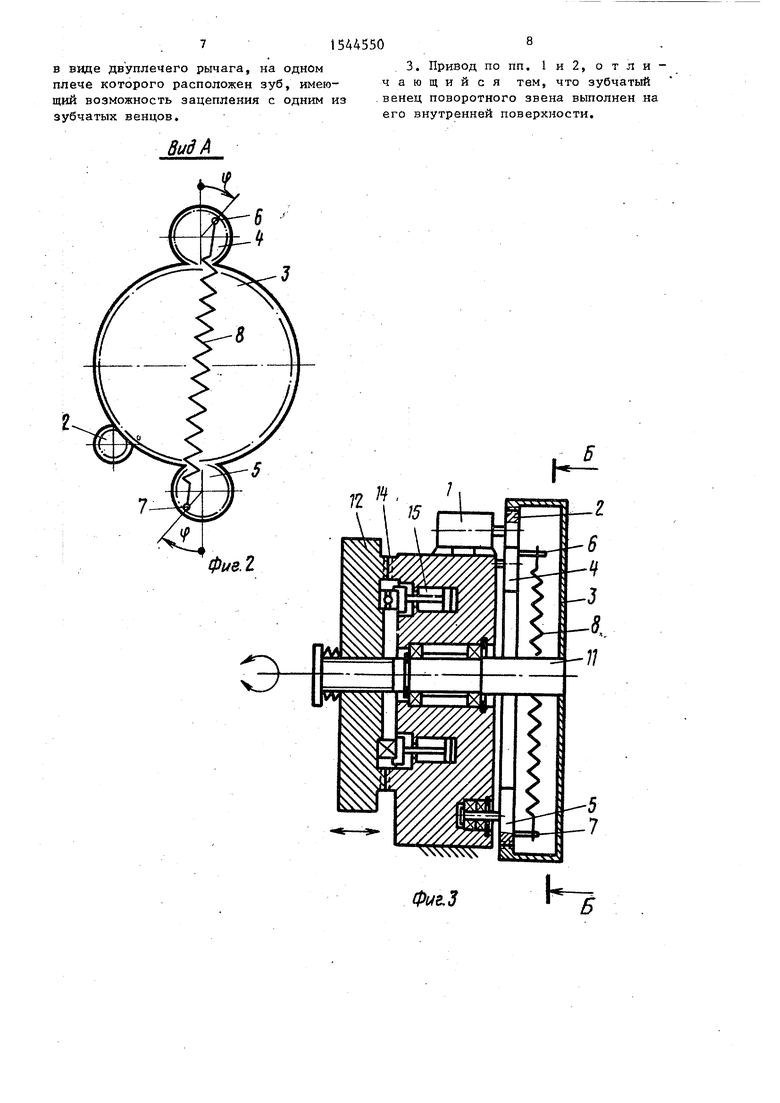
ведомого поворотного звена; на фиг о 2 - вид А на фиг.1; на фиг.З - резонансный привод с внутренним венцом поворотного ведомого звена; на фиг. 4 - разрез Б-Б на фиг.З. Резонансный привод содержит двигатель 1, на валу которого закреплено ведущее звено 2, например шестерня, кинематически связанная с поворотным ведомым звеном 3, которое может быть снабжено зубчатым венцом с наружными зубьями (фиг01 и 2) или с внутренни- ми зубьями (фиг.З и 4). С поворотным ведомым звеном посредством выполненных на них зубчатых венцов кинематически связаны кривошипы 4 и 5, имеющие шипы 6 и 7, на которых шарнирно закреплены концы упругого элемента 8 (в данном примере - пружины растяжения).
Привод снабжен фиксатором 9, выполненным1 в виде установленного на оси двуплечего рычага, на одном плече которого расположен зуб, входящий в положении Ликсации элементов привода в зацепление г зубчатым венцом
0
10
35
з
Q45
50
55
кривошипа 4 (фиг.1) или с зубчатым венцом поворотного ведомого звена 3 (фиг,4). Другое плечо рычага соединено с электромагнитом 10 включения - выключения фиксатора. При использова- нии привода в револьверной головке поворотное ведомое звено 3 закрепляется на одном валу 11 с инструментальным диском 12, сопрягаемым с корпусом 13 посредством торцовой зубчатой муфты 14. Для осевого перемещения диска 12 предусмотрены гидроцилиндры 15.
Револьверная головка, оснащенная резонансным приводом позиционирования инструментального диска, выполненным согласно изобретению, работает следующим образом,
В исходном положении шипы 6 и 7 шривошипов 4 и 5 находятся на максимальном расстоянии друг от друга, и точки закрепления упругого элемента на шипах лежат на прямой, проходящей через оси обоих кривошипов, т„е. упругий элемент 8 максимально растянут взведен/. В этом положении зуб фиксатора 9 находится в зацеплении с зубчатым венцом кривошипа 4 (сЪиг.1) или с зубчатым венцом поворотного ведомого звена 3 (фиг. 4), муфта 14 также сцеплена, а двигатель 1 выключен, При этом привод, когд-1 уголф 0, находится в положении неустойчивого равновесия.
Для перевода инструментального диска 12 в следующую рабочую позицию, он посредством гицроцилиндров 15 отводится от корпуса 13 (на фиг. 1,3 - влево), скользя по шлицам вала 11, в результате чего муфта 14 расцепляется и подаются команды на выключение фиксатора 9 посредством электромагнита 10, и включение двигателя 1, к
10
15
20
25
более целесообразным является выполнение поворотного ведомого звена 3 с внутренним зубчатым венцом, что позволяет разместить кинематически связанные с ним кривошипы 4 и 5, ведущее звено 2, а также фиксатор 9 внутри него. При таком выполнении обеспечивается большое передаточное отношение в предельно малых габари1- тах и без дополнительных понижающих передач.
Упругий элемент 8 может быть выполнен как в виде пружины растяжения, так и пружинь сжатия. В последнем варианте положение неустойчивого равновесия элементов привода будет при максимальном сближении шипов 6 и 7. Наиболее эффективно снижение потребляемой энергии двигателем 1 проявляется благодаря более интенсивному возрастанию крутящего момента под действием упругого элемента сжатия в начальной фазе движения из положения неустойчивого равновесия. Поскольку в момент страгивания КПД двигателя мал, то чем быстрее упругий элемент начнет помогать двигателю, тем меньше энергии последний возьмет из сети.
Формула изобретения
1,, Резонансный привод, содержащий кинематически связанные с двигателем поворотное звено и кривошип, а также фиксатор положения звеньев привода и упругий элемент, один конец которого шарнирно закреплен на шипе кривошипа, о тличающийся тем, что, с целью уменьшения габаритов, расширения технологических возможностей за счет увеличения числа точек 45 позиционирования и снижения энергозатрат за счет уменьшения инерции вращающихся масс, он снабжен дополнительным кривошипом, который кинематически связан с поворотным звеном, вновь оказываются на максимальном уда-50 при этом на шипе дополнительного кри- ления друг от друга и упругий элемент вошипа шарнирно закреплен второй кокоторому подводится напряжение нужной полярности, обеспечивающее поворот звена 3, вала II и диска 12 в требуемом направлении. Шестерня 2, закрепленная на валу двигателя 1, выводит привод из положения неустойчивого равновесия, т0е„ угол Ц 0. При этом вращение кривошипов 4 и 5 под действием силы сжатия упругого элемента и вращающий момент от шестерни 2 двигателя 1 передаются на поворотное ведомое звено 3 и соответственно на вал 11 и диск 12. Передаточное отношение i - -2.S t где z, - z z
число зубьев зубчатого венца поворотного ведомого звена 3, а г4 и число зубьев зубчатых венцов кривошипов 4 и 5, выбрано таким, чтобы при полном обороте кривошипов 4 и 5 диск 12 поворачивался на угол,соответствующий его перемещению из одной позиции в соседнюю, например, при 8-позиционной револьверной головке этот угол равен 45 .
Вращение поворотного ведомого звена 3 и диска 12 под действием упругого элемента 8 в начальной стадии, пока упомянутый элемент сжимается (до поворота кривошипов 4 и 5 на 180°), происходит с ускорением, а затем при растяжении упругого элемента (в процессе дальнейшего поворота кривошипов на 180 ) --с замедлением. По завершении полного оборота кривошипов зуб фиксатора 9 посредством электромагнита 10 вводится в зацепление с зубчатым венцом кривошипа 4 (фиг.1) или с зубчатым венцом поворотного ведомого звена 3 (фиг.4), в результате чего стопорятся элементы привода и соответственно вал 11 и диск 12, переведенный таким образом в следующую рабочую позицию. Одновременно отключается двигатель 1, а затем замыкается муфта 14, точно базирующая диск 12 на корпусе 13, При этом шипы 6 и 7 кривошипов 4 и 5
30
35
40
приходит во взвешенное состояние, а элементы привода находятся в положении неустойчивого равновесия, т0е« привод готов к осуществлению следующего цикла позиционирования.
В револьверных головках с большим числом (8 и более фиксируемых позиций инструментального диска 12 наи10
15
20
25
30
45 50
35
45 50
40
нец упругого элемента.
в виде двуплечего рычага, на одном плече которого расположен зуб, имеющий возможность зацепления с одним из зубчатых венцов.
8ид А
Фиг.3
Фие.Ь
| Резонансный привод | 1986 |
|
SU1357219A1 |
| Прибор для равномерного смешения зерна и одновременного отбирания нескольких одинаковых по объему проб | 1921 |
|
SU23A1 |
