(54) АВТОМАТИЧЕСКАЯ РЕВОЛЬВЕРНАЯ ГОЛОВКА
| название | год | авторы | номер документа |
|---|---|---|---|
| Автоматическая револьверная головка | 1978 |
|
SU751511A1 |
| Автоматическая револьверная головка | 1984 |
|
SU1194590A2 |
| Автоматическая револьверная головка металлорежущего станка | 1980 |
|
SU944803A1 |
| Автоматическая револьверная головка металлорежущего станка | 1985 |
|
SU1329918A1 |
| Автоматическая револьверная головка металлорежущего станка | 1990 |
|
SU1814990A1 |
| Инструментальная револьверная головка | 1987 |
|
SU1484457A1 |
| Револьверная головка | 1990 |
|
SU1787698A1 |
| Автоматическая револьверная головка | 1985 |
|
SU1292930A1 |
| АВТОМАТИЧЕСКАЯ РЕВОЛЬВЕРНАЯ ГОЛОВКА | 1993 |
|
RU2051012C1 |
| МНОГОПОЗИЦИОННАЯ ИНСТРУМЕНТАЛЬНАЯ ГОЛОВКА | 1992 |
|
RU2071870C1 |

1
Изобретение относится к обпасти станкостроения и может быть использовано в станках с автоматической сменой инструмента, в частности в токарных станках с ЧПУ.
Известна автоматическая револьверная головка, содержащая эпектромехашгческий привод с меха1шзмами зажима (разжима), поворота и фиксации корпуса головки. Корпус головки имеет поверхности дЛя установки и за1фепления инструментальных блоков. Электродвигатель привода головки размещен внутри поворотного корпуса, в приводе использована планетарная передача вместо обычного зубчатого редуктора. Электрическая схема головки позволяет поворачивать корпус на любое число позиций без остановки и останавливать его в любой позиции по команде от программоносителя,у
Поворот и зажим автоматической револьверной головки осуществляются двигателем через зубчатые передачи (планетарный редуктор).
Момент, необходимый для преодоления сил трения в винтовых и кулачковых передачах и слсатия пружины для плотного контакта фиксирующих поверхностей достаточно велик, что предопределяет относительно большие габариты и мощность электродвигателя револьверной головки Ell.
10
Недостатком известной головки является неизменяемая (постоянная)частота вращения инструментодержателя. Это не позволяет выбирать (программиро вать) оптимЕШЬНое время смены инстру 15м.ентального набора в зависимости от его массы и количества.
Целью изобретения является упрощение конструкции, повышение надежности и долговечности в работе головки.
20
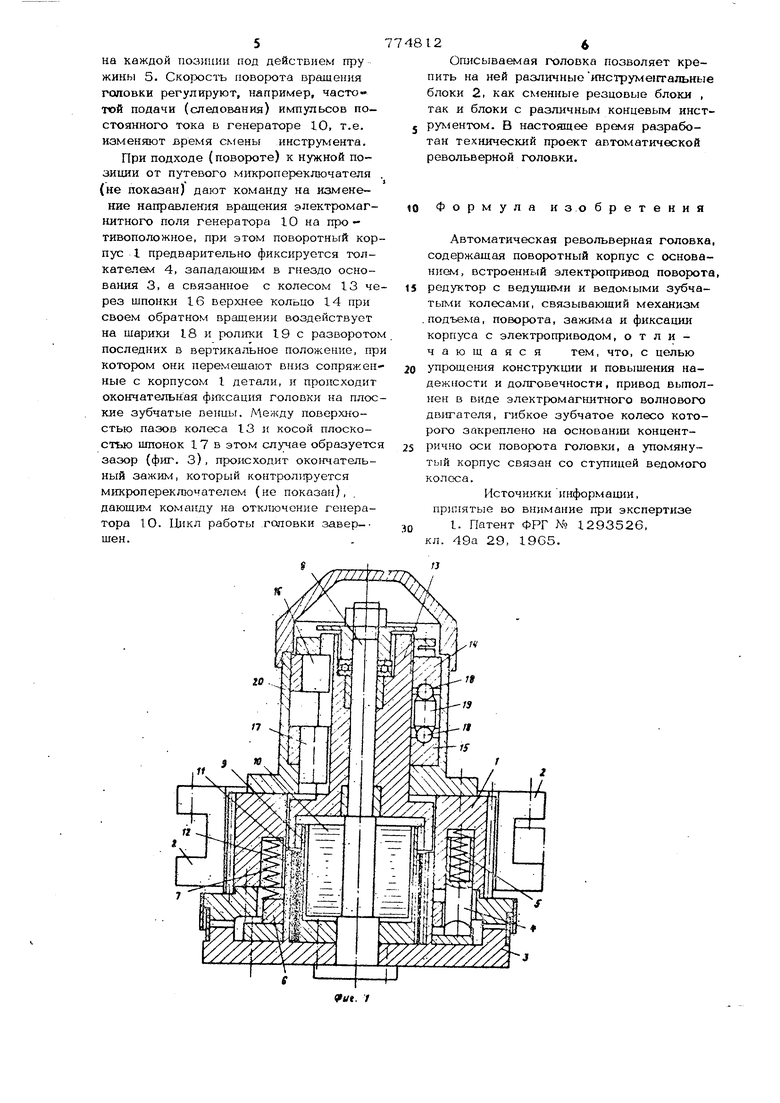
Цель достигается тем, что привод головки выполнен в виде электромагнитного волнового двигателя, гибкое зубчатое колесо которого закреплено на осковпиин KoHuettTpHHHo оси поворота головки, а поворотный корпус головки связан со ступицей ведомого колеса. На фиг, I изображена автоматическая револьверная головка, разрез по оси; на фиг. 2 - схема рабочих положений механизма зажима; на фиг. 3 - схема рабочих положений механизмов зажима и поворюта. Головка содержит поворотный вокруг центральной оси корпус 1 с закрепленными на нем инструментальными блоками 2, основание 3 с зубчатым фиксирующим венцом для точного позиционирования корпуса, устройство для предварительной фиксации последнего, выполненное в виде толкателя 4 и пружины 5 и предназначенное для предотвращения, попадания зуба зуб фиксирующих венцов, механизм подъема корпуса, включающий упорный диск 6 и равномерно расположенные по окружности сжатые пружишзг 7, стойку 8 и гибкое зубчатое колесо 9 волновой передачи, жестко связанные с зафиксированным основаш ем 3. Внутри гибкого колеса на стойке 8 разглеще источник - электромагнитный генератор 10, выполненный в виде статора с катуипсами, предназначенный для деформации гибкого колеса, снару жи - магнитопровод 11, заключенный в изогофующую втулку (экран) 12. Возможно также внешнее размещение источника Ю относительно гибкого колеса 9. Над гибким колесом установлена на подшипниках на стойке 8 ступица взаимо действузошего с ним жесткого зубчатого колеса 13. На этой ступице, имеющей три равномерно расположенных по окруж ности продольных паза, установлены (размеудены) кольца 14 и 15 механизмов поворота в виде спаренных, взаимодействующих с пазами шпонок 16 и шпонок 17 со срезом, а также механизмов зажима, .включающих щарики 18 и ролики 19.Кольца 14 и 15 заключены в стака 20,жестко связанный с поворотным кор пусом I. Головка работает следующим обра зом. При отсутетвии напряжения в об мотках электромагнитного генератора между зубьями гибкого 9 и жесткого 13 колес имеется зазор. При подаче напряжения в катущки по люсов генератора 10, упруго- ибкое колесо 9 притягивается к статору генер тора Ю, а секторы его зубчатых венпо входят в зацепление с зубьями зубчатого колеса 13. Маг штный поток полюсо 124 амыкается через стенку гибкого колеса 9 и дополнител1: ныи магнитопровод II. Воздушный зазор между зубьями становится неравномерным. Этот рржим называют фиксированным остановом под током. Момент фиксации нриш1мается за начало отсчета угла вращения магнитодвижущей силы ЗМГ и угла поворота жесткого колеса 13 вместе с закрепленHbiM инструментодержателем. С подачей на вход первого импульса управл51ющего сигнала коммутатор обеспечивает поворот магнитодвижущей силы генератора Ю на какой-то угол, определяемый полюсов. Гибкое колесо 9, деформируясь под действием электромагнитных сил возбужденных полюсов, принуждает свой зубчатый сектор обкатиться без проскальзывашш по венцу жесткого колеса 13 на угол, равный углу сдвига магнитодвижущей силы генератора 10. За счет наличия разности зубьев гибкого 9 и жесткого 13 колес последнее поворачивается на соответствующий угол. По команде (например, от программоносителя станка с ЧПУ) с последовательной подачей, например, импульсов постоянного тока в диаметрально противоположные участки обмотки генератора 10 (в другом исполнении возможна запитка катушек токами, смещенньгми по фазе), создаются и усиливаются магнитопроводом 11 электромагнитные силы, вызывающие волновую деформашпо гибкого колеса 9 соответствующего направления. Это вращает жесткое колесо 13 и одновременно с ним начинает вращение верхнею кольцо 14, движение которому передается щпонками 16, относительно нижнего кольца 15. В этот период времени осуществляются повороты роликов 19 с шариками 18 на угол об и подъем кольца 15 вверх по стрелке на величину h (фиг.2), происходит подъем поворотного корпуса 1, осуществляя расфиксацию головки воздействующими на корпус пружинами 7. В конце подъема головки из за вращения верхнего кольца 14 между кольцами 14 и 15 образуется угол /3 (фиг.З), шпонки 17 своим клиновым выступом (косой ПЛОСКОСТЬЮ ) упираются в поверхности пазов ступицы жесткого колеса 13, что вызывает поворот корпуса 1 (автоматическое враще1ше головки в целом). Происходит поворот револьверной головки на любое число позиций без остановки в промежутоных позициях при срабатывании толкателя 1 5 на каждой позиинн под действием пру жины 5. Скорос1ъ поворота врашення головки регулируют, например, частотой подачи (следования) импульсов постоянного тока в генераторе 10, т.е. изменяют время смены инструмента. При подходе (повороте) к нужной позиции от путевого микропереключателя (не показан) дают команду на изменение направления вращения электромагнитного поля генератора 10 на противоположное, при этом поворотный кор пус I предварительно фиксируется толкателем 4, западающим в гнездо основания 3, а связанное с колесом 13 че рез щпонки 16 верхнее кольцо 14 при своем обратном вращении воздействует на щарики 18 и ролики 19 с разворото последних в вертикальное положение, пр котором они перемещают вниз сопряжен ные с корпусом I детали, и происходит окончательная фиксация головки на плос кие зубчатые венцы. Между поверхностью пазов колеса 13 н косой плоскостью шпонок 17 в этом случае образуетс зазор (фиг. З), происходит окончательный зажик, который контрол1фуется микропереключателем (не показан), дающим команду на отключение генератора 10. Цикл работы головки завер-щен.
«
т 126 Описываемая головка позволяет крепить на ней различные инструментальные блоки 2, как сменные резцовые блоки , так и блоки с различным концевым инстpyNieHTOM. В настоящее время разработан технический проект автоматической револьверной головки. Формула изобретения Автоматическая револьверная головка, содержащая поворотный корпус с основанием, встроенный электропривод поворота, редуктор с ведущими и ведомыми зубчатыми колесами, связывающий механизм подъема, поворота, зажима и фиксации корпуса с электроприводом, отличающаяся тем, что, с целью упрощения конструкции и повыщения надежности и долговечности, привод выпол1ген в виде электромагнитного волнового двигателя, гибкое зубчатое колесо которого закреплено на основанш концентрично оси поворота головки, а упомянутый корпус связан со ступицей ведомого колсюа. Источники информации, пр П1ятые во внимание при экспертизе 1. Патент ФРГ № 1293526, кл. 49а 29, 1965.
