Изобретение относится к машиностроению, а именно к приводим робо- и манипуляторов с пониженным энергопотреблением.
Целью изобретения является повышение надежности за счет исключения ударных нагрузок.
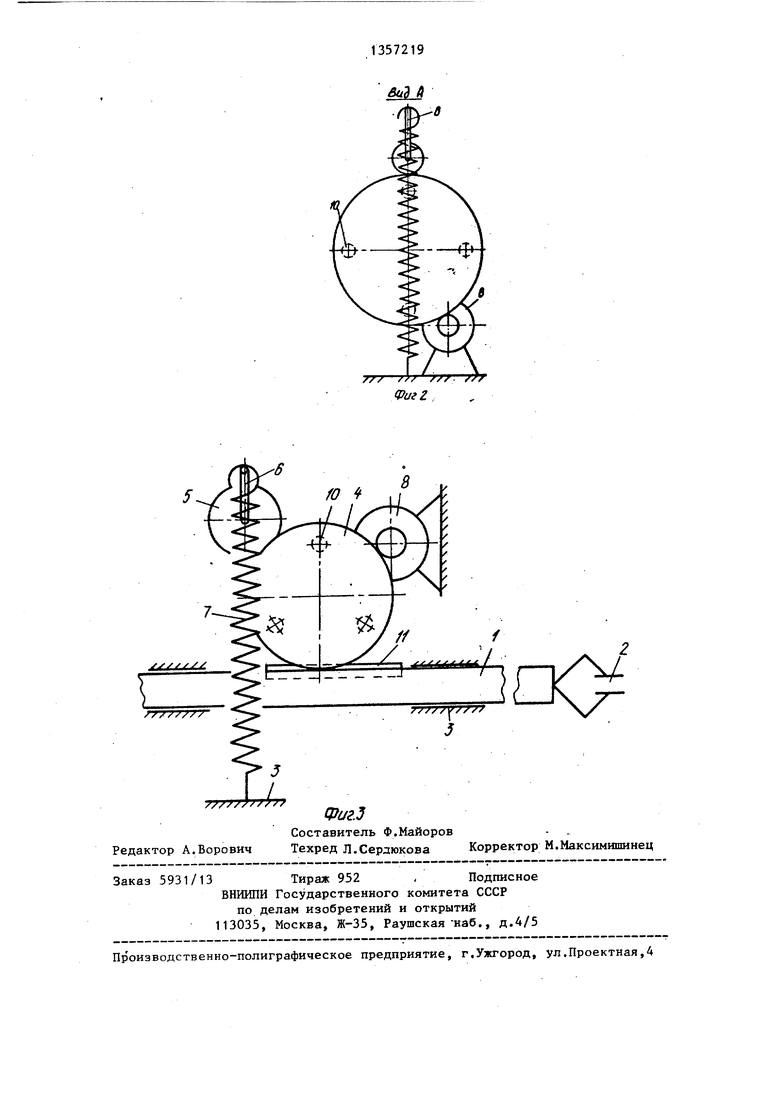
На фиг.1 изображена кинематическая схема устройства (в случае углового перемещения исполнительного органа); на фиг.2 - вид А на фиг.1; на фиг.З - кинематическая схема устройства для пос тупательного перемеще HHff исполнительного органа.
Привод предназначен для Чтеремещения исполнительного органа 1 (например, руки робота), на котором закреплен схват 2. Исполнительный орагн 1 установлен с возможностью вращения относительно основания 3 (в частности, это может быть предыдущее звено руки робота). Промежуточный диск 4 связан с исполнительным органом 1 и находится в зацеплении с диском 5, закрепленным на оси кривошипа 6, шарнир- но связанного с концом упругого элемента (пружины) 7, второй конец которого закреплен на основании 3. Кроме того, в зацеплении с промежуточным диском 4 находится вал 8.
На основании 3 установлен также .фиксатор 9, взаимодействующий со своими ответными частями 10, расположен15 сия. При поступлении команды от системы управления (не показана) сначала включается двигатель 8 (на поворот в соответствующую сторону) и . выводит привод из положения неустой2Q чивого равновесия, при этом перемещение звеньев происходит за счет за- .зоров в кинематической цепи. Затем размыкается связь фиксатора 9 с ответной частью 10. Под действием на25 тяжения взведенной пружины 7 происходит вращение кривошипа 6 и приведение в движение всех звеньев привода. При этом движение (вращение) звеньев сначала происходит с ускоре30 нием до тех пор, пока пружина 7 сжимается, а затем - с замедлением, поскольку передаточное отношение между кривошипом 6 и исполнительным органом 1 выбирается таким, что поло:ными по окружности на диске 4 и сдви- 35 позиционирования исполнительногр органа 1 всегда соответствует нахождению системы привода в положении неустойчивого равновесия, т.е,. максимальному растяжению пружины 7.
нутыми друг относительно друга на угол- с/ :
0/ :D, ,
где Dj - диаметр диска кривошипа;
D, - диаметр промежуточного диска.
Фиксатор 9 и соответствующие ему ответные части 10 расположены относительно кривошипа 6 и пружины 7 таким образом, что при их взаимодействии (т.е. при фиксировании привода) оси диска 5 и пружины 7 лежат в одной плоскости и привод находится в положении неустойчивого равновесия. Это положение соответствует максимальному нагружению, т.е. растяжению пружины 7, и одновременно совпадает с требуемым положением позиционирования исполнительного органа 1. В случае необходимости осуществления исполнительным органом 1 поступательного перемеп1ения, в кинематическую
40
Формула изобретения
4
Резонансный привод, содержащий кинематически связанное счдвигателем подвижное звено, фиксаторы положе45 ния одного из звеньев привода и упругий элемент, один из концов которого связан с основанием, о т л и - чающийся тем, что, с целью повышения надежности позиционирова50 ния, сокращения энергозатрат и упрощения конструкции, он содержит кинематически связанньй с подвижным звеном кривошип, второй конец упругого элемента шарнирно закреплен на
55 шипе кривошипа, а фиксаторы положения расположены таким образом, что в положении фиксации точки закрепления упругого элемента лежат на прямой, проходящей через ось кривошипа.
цепь привода рведена зубчато-реечная передача, рейка 11 которой расположена на исполнительном органе 1.
Устройство работает следующим об« разом.
В исходном положении пружина 7 находится во взведенном, т.е. максимально растянутом положении. При
этом исполнительный орган 1 зафиксирован, т.е. фиксатор 9 контактирует с соответствующей ответной частью 10, при этом привод находится в положении неустойчивого равнрве-
сия. При поступлении команды от системы управления (не показана) сначала включается двигатель 8 (на поворот в соответствующую сторону) и . выводит привод из положения неустойчивого равновесия, при этом перемещение звеньев происходит за счет за- .зоров в кинематической цепи. Затем размыкается связь фиксатора 9 с ответной частью 10. Под действием натяжения взведенной пружины 7 происходит вращение кривошипа 6 и приведение в движение всех звеньев привода. При этом движение (вращение) звеньев сначала происходит с ускорением до тех пор, пока пружина 7 сжимается, а затем - с замедлением, поскольку передаточное отношение между кривошипом 6 и исполнительным органом 1 выбирается таким, что поло40
Формула изобретения
4
Резонансный привод, содержащий кинематически связанное счдвигателем подвижное звено, фиксаторы положе45 ния одного из звеньев привода и упругий элемент, один из концов которого связан с основанием, о т л и - чающийся тем, что, с целью повышения надежности позиционирова50 ния, сокращения энергозатрат и упрощения конструкции, он содержит кинематически связанньй с подвижным звеном кривошип, второй конец упругого элемента шарнирно закреплен на
55 шипе кривошипа, а фиксаторы положения расположены таким образом, что в положении фиксации точки закрепления упругого элемента лежат на прямой, проходящей через ось кривошипа.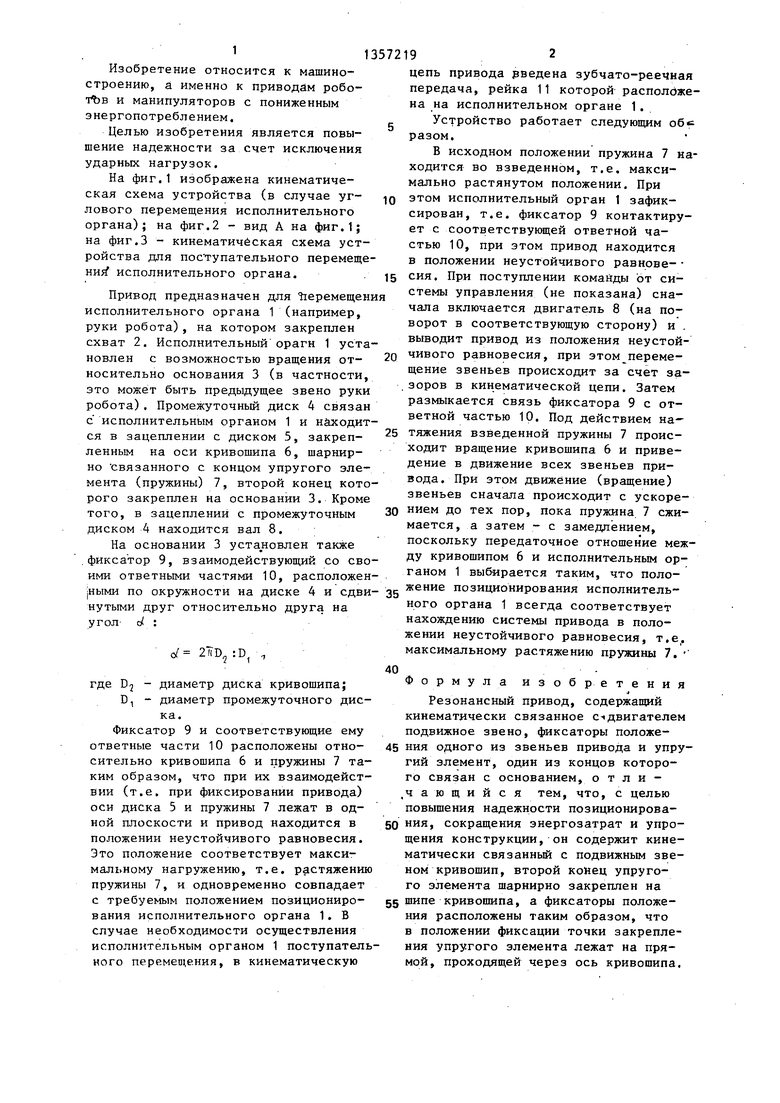
| название | год | авторы | номер документа |
|---|---|---|---|
| Модуль резонансного манипулятора | 1988 |
|
SU1611730A1 |
| Резонансный привод | 1988 |
|
SU1544550A1 |
| Модуль резонансного манипулятора | 1988 |
|
SU1585143A1 |
| КРИВОШИП С ПЕРЕМЕННЫМ РАДИУСОМ | 2000 |
|
RU2185897C2 |
| НОЖЕВОЙ МИННЫЙ ТРАЛ ДЛЯ ИНЖЕНЕРНЫХ МАШИН РАЗГРАЖДЕНИЯ | 2000 |
|
RU2168693C1 |
| Промышленный робот (его варианты) | 1983 |
|
SU1120586A1 |
| Исполнительный орган промышленного робота | 1977 |
|
SU738867A1 |
| ЗУБЧАТО-РЫЧАЖНЫЙ МЕХАНИЗМ С ПЕРИОДИЧЕСКИМИ ОСТАНОВКАМИ В.И. ПОЖБЕЛКО | 2003 |
|
RU2252350C1 |
| Самоцентрирующийся патрон | 1985 |
|
SU1273216A1 |
| Робот к листоштамповочному прессу | 1986 |
|
SU1465158A1 |
Изобретение относится к области машиностроения, а именно к приводам роботов и манипуляторов с пониженным энергопотреблением. Целью изобрете,ния является повьшение надежности за счет исключения ударных нагрузок. В исходном положении пружина 7 находится во взведенном положении, при этом ° исполнительный орган 1 зафиксирован фиксатором 9, находящимся во взаимодействии с одной из своих ответных частей, расположенных по окружности на промежуточном диске 4. Последний находится в зацеплении с диском 5, закрепленный на оси кривошипа 6, и валом двигателя .8. При поступлении команды от системы управления сначала включается двигатель 8, который, выбирая зазоры, выводит привод из положения неустойчивого равновесия, затем происходят расфиксация фиксатора 9 и под действием натяжения взведенной пружины 7 вращение кривошипа 6 и приведение в движение всех звеньев привода. Сначала вращение звеньев происходит с ускорением, пока пружина 7 сжимается, а затем с замедлением с последующей фиксацией при максимальном растяжении пружины 7. 3 кл. § О) со ел Х)
Фиг.
Составитель Ф.Майоров Редактор А.Ворович Техред Л.Сердюкова Корректор М.Максимишннец
Заказ 5931/13 Тираж 952 , Подписное ВНИИПИ Государственного комитета СССР
по делам изобретений и открытий 113035, Москва, Ж-35, Раушская наб., д.4/5
Пр оизводственно-полиграфическое предприятие, г.Ужгород, ул.Проектная,4
| Привод перемещения исполнительного органа робота | 1982 |
|
SU1219335A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
| Устройство для видения на расстоянии | 1915 |
|
SU1982A1 |
