Изобретение относится к транспортной технике и может быть использовано для дистанционного управления многоступенчатыми трансмиссиями, преиму- щественно транспортных средств большой мощности и грузоподъемности.
Цель изобретения - повышение надежности работы устройства управления многоступенчатой трансмиссией пу- тем компенсации погрешности углового перемещения выходного звена шагового привода.
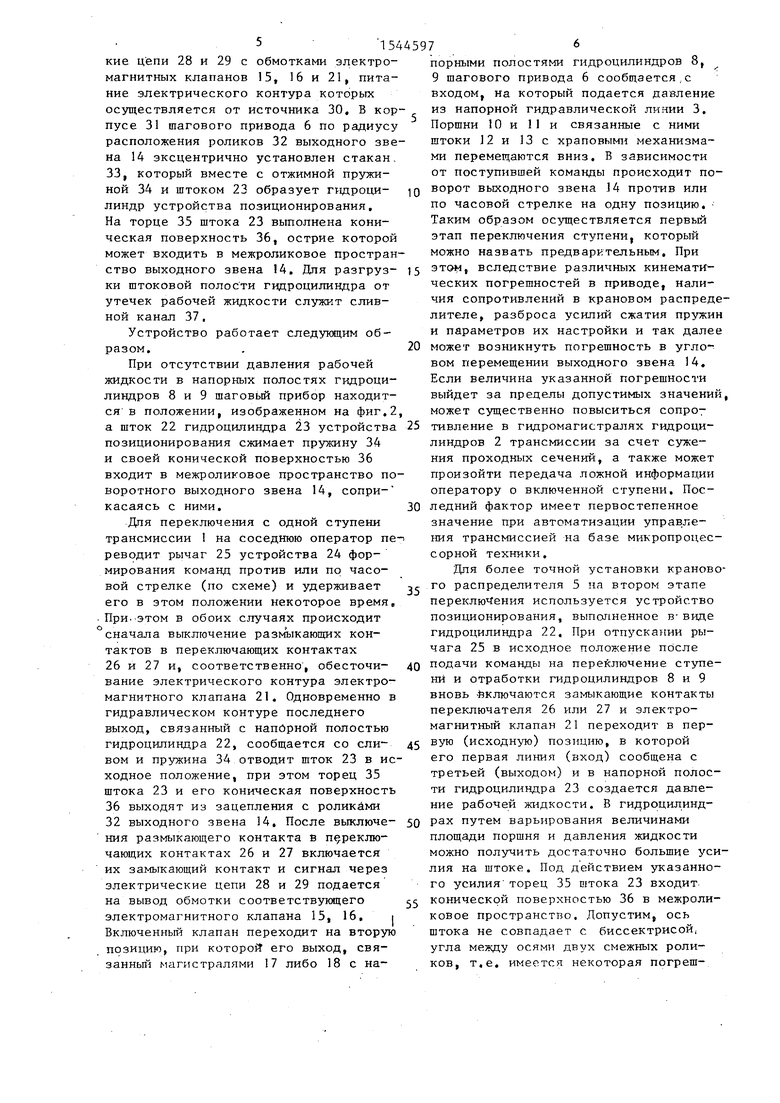
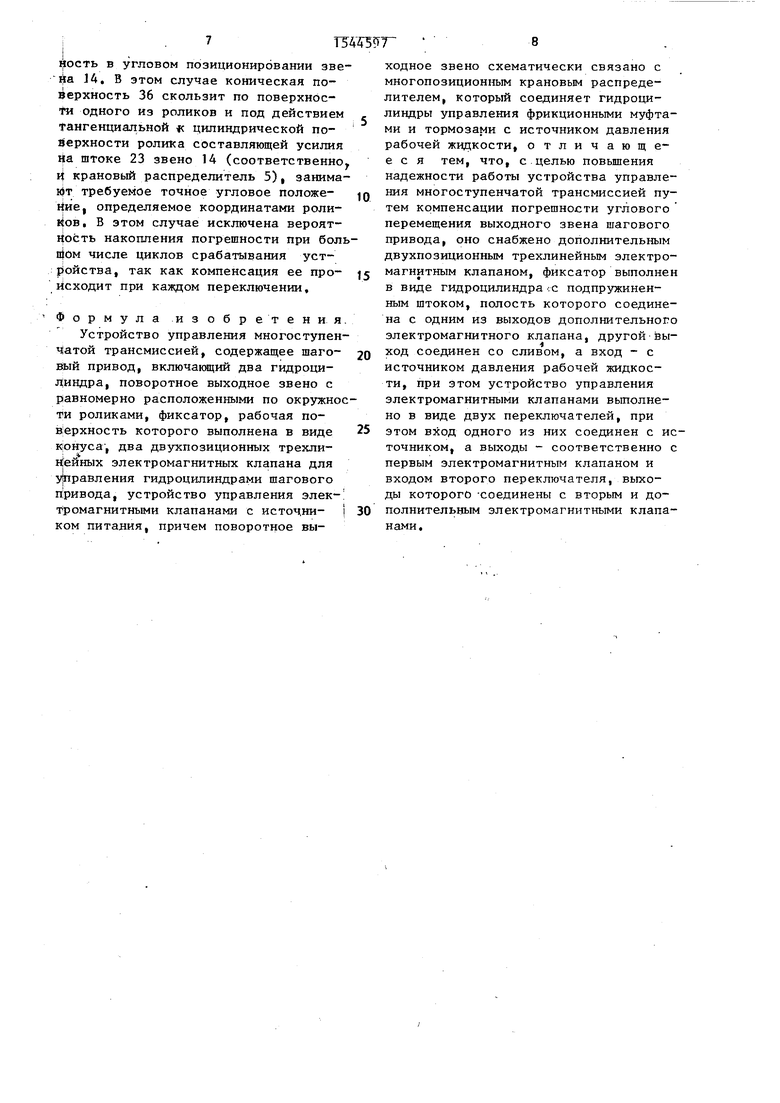
На фиг.1 приведена гидравлическая схема устройства управления многосту- пенчатой трансмиссией в состоянии подачи сигнала.на включение гидроцилиндра устройства позиционирования выходного звена шагового привода; на фиг.2 - конструкция шагового привода с устройством позиционирования во включенном состоянии гидроцилиндра последнего.
Многоступенчатая трансмиссия 1
(фиг.1) содержит гидроцилиндры 2 уп
гавления фрикционными муфтами и тормозами (по числу указанных элементов для включения различных ступеней зубчатого редуктора (не показаны). Для соединения гидроцилиндров 2 с напор- ной гидролинией 3 источника 4 давления рабочей жидкости либо со сливом служит многопозипионный крановый распределитель 5 известной конструкции, число угловых положений (позиций) ко
торого равно числу ступеней трансмиссии плюс нейтраль.
Шаговьй механизм управления трансмиссией содержит шаговый привод 6, устанавливаемый непосредственно на трансмиссии, и электрогидравлический командный блок 7,
Шаговый привод 6 содержит два расположенных вертикально гидроцилиндра
Q
5
0
5
0
,-
0
5
8 и 9 с подпружиненными поршнями 10 и 11, штоками 12 и 13, на которых шар- нирно закреплены собачки храпового механизма, и поворотное выходное звено 14, установленное соосно крановому распределителю 5 и кинематически связанное с ним.
Командный блок 7 содержит два установленных на трансмиссии электромагнитных двухпоэиционных трехлинейных клапана 15 и 16 включения гидроцилиндра 8 и 9. Первые линии клапанов 15 и 16 сообщены с напорной гидролинией 3 источника 4 давления рабочей жидкости, вторые - со сливом, а третьи - . гидролиниями 17 и 18с напорными полостями гидроцилиндров 8 и 9 шагового привода 6. Напорная полость каждого из гидроцилиндров 8 и 9 сообщена соответственно гидролинией 19 и 20 со штоковой полостью другого гидроцилиндра. В командный блок 7 также входит дополнительный (третий) электромагнитный двухпозиционный трехлинейный клапан 21, первая линия которого сообщена с напорной гидролинией 3 источника 4 давления рабочей жидкости, вторая - со сливом, третья - с напорной полостью гидроцилиндра 22, в котором размещен шток 23, служащий фиксатором устройства позиционирования. Блок 7 содержит также устройство 24 формирования команд на, пошаговое перемещение выходного звена 14 и на включение и выключение гидроцилиндра 22 устройства позиционирования. Формирование указанных команд в виде электрических сигналов может осуществляться любым известным путем, I например с помощью электроконтактов. В устройстве используются управляемые рычагом 25 переключающие контакты 26 и 27, связанные через электричес5 15445976
кие цепи 28 и 29 с обмотками электро- порными полостями гидроцилиндров 8, магнитных клапанов 15, 16 и 21, пита- 9 шагового привода 6 сообщается с ние электрического контура которых входом, на который подается давление осуществляется от источника 30. В кор- из напорной гидравлической линии 3. пусе 31 шагового привода 6 по радиусу расположения роликов 32 выходного звена 14 эксцентрично установлен стакан 33, который вместе с отжимной пружиной 34 и штоком 23 образует гидроци- ю
Поршни 10 и 11 и связанные с ними штоки 12 и 13 с храповыми механизмами перемещаются вниз. В зависимости от поступившей команды происходит по ворот выходного звена 14 против или по часовой стрелке на одну позицию. Таким образом осуществляется первый этап переключения ступени, который можно назвать предвар1-тельным. При
линдр устройства позиционирования. На торце 35 штока 23 выполнена коническая поверхность 36, острие которой может входить в межроликовое пространпорными полостями гидроцилиндров 8, 9 шагового привода 6 сообщается с входом, на который подается давление из напорной гидравлической линии 3.
Поршни 10 и 11 и связанные с ними штоки 12 и 13 с храповыми механизмами перемещаются вниз. В зависимости от поступившей команды происходит поворот выходного звена 14 против или по часовой стрелке на одну позицию. Таким образом осуществляется первый этап переключения ступени, который можно назвать предвар1-тельным. При
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство управления многоступенчатой трансмиссией | 1989 |
|
SU1682217A1 |
| Устройство управления многоступенчатой трансмиссией | 1985 |
|
SU1369936A1 |
| Устройство управления многоступенчатой передачей транспортного средства | 1985 |
|
SU1341072A1 |
| Система управления гидромеханической многоступенчатой передачей | 1987 |
|
SU1437257A1 |
| Система управления гидромеханической коробкой передач транспортного средства | 1985 |
|
SU1316859A1 |
| ГИДРАВЛИЧЕСКИЙ ПОЗИЦИОННЫЙ ПРИВОД | 2009 |
|
RU2458261C2 |
| УСТРОЙСТВО ДЛЯ ПОДАЧИ ДЛИННОМЕРНОГО ПРОКАТА В ЗОНУ ОБРАБОТКИ | 1994 |
|
RU2104115C1 |
| Система автоматического управления и защиты многоступенчатой трансмиссии транспортного средства | 1988 |
|
SU1523417A1 |
| Двухканальный гидравлический автомат управления гидромеханической трансмиссией | 1989 |
|
SU1682219A1 |
| Система автоматического управления гидромеханической трансмиссией | 1985 |
|
SU1341071A1 |

Изобретение относится к транспортной технике и может быть использовано для дистанционного управления многоступенчатой трансмиссией. Цель изобретения - повышение надежности в работе устройства управления многоступенчатой трансмиссии путем компенсации погрешности углового перемещения выходного звена шагового привода. Устройство содержит крановый распределитель 5, который кинематически связан с выходным поворотным звеном 14 шагового привода 6 и обеспечивает переключение ступеней в трансмиссии 1 по сигналу командного блока 7. Точность позиционирования выходного звена 14 обеспечивается устройством позиционирования, которое выполнено в виде гидроцилиндра 22, штоком которого служит взаимодействующий с возвратной пружиной 34 фиксатор 23, а его рабочая коническая поверхность взаимодействует с роликами выходного звена 14. Управление гидроцилиндром 22 осуществляется командным блоком 7 через дополнительный двухпозиционный трехлинейный электромагнитный клапан 21, при этом устройство формирования команд блока 7 выполнено в виде двух переключающих электрических контактов 26, 27. 2 ил.
ство выходного эвена 14. Для разгруз- 15 этом, вследствие различных кинемати20
ки штоковой полости гидроцилиндра от утечек рабочей жидкости служит сливной канал 37.
Устройство работает следующим образом.
При отсутствии давления рабочей жидкости в напорных полостях гидроцилиндров 8 и 9 шаговый прибор находится в положении, изображенном на фиг.2, а шток 22 гидроцилиндра 23 устройства 25 тивление в гидромагистралях гидроци- позиционирования сжимает пружину 34 линдров 2 трансмиссии за счет суже- и своей конической поверхностью 36 ния проходных сечений, а также может
ческих погрешностей в приводе, наличия сопротивлений в крановом распред лителе, разброса усилий сжатия пружи и параметров их настройки и так дале может возникнуть погрешность в угловом перемещении выходного звена 14. Если величина указанной погрешности выйдет за пределы допустимых значени может существенно повыситься сопро
входит в межроликовое пространство поворотного выходного звена 14, сопри- касаясь с ними.
Для переключения с одной ступени трансмиссии 1 на соседнюю оператор пе реводит рычаг 25 устройства 24 формирования команд против или по часовой стрелке (по схеме) и удерживает его в этом положении некоторое время. При этом в обоих случаях происходит сначала выключение размыкающих контактов в переключающих контактах 26 и 27 и, соответственно, обесточи- вание электрического контура электромагнитного клапана 21. Одновременно в гидравлическом контуре последнего выход, связанный с напорной полостью гидроцилиндра 22, сообщается со сливом и пружина 34 отводит шток 23 в исходное положение, при этом торец 35 штока 23 и его коническая поверхность 36 выходят из зацепления с роликами 32 выходного звена 14. После выключе- ния размыкающего контакта в переключающих контгчктах 26 и 27 включается их замыкающий контакт и сигнал через электрические цепи 28 и 29 подается на вывод обмотки соответствующего электромагнитного клапана 15, 16. i Включенный клапан переходит на вторую позицию, при которой его выход, связанный магистралями 17 либо 18 с на
тивление в гидромагистралях гидроци- линдров 2 трансмиссии за счет суже- ния проходных сечений, а также может
ческих погрешностей в приводе, наличия сопротивлений в крановом распределителе, разброса усилий сжатия пружин и параметров их настройки и так далее может возникнуть погрешность в угловом перемещении выходного звена 14. Если величина указанной погрешности выйдет за пределы допустимых значений, может существенно повыситься сопро5
0
0
произойти передача пожной информации оператору о включенной ступени. Пос0 ледний фактор имеет первостепенное значение при автоматизации управления трансмиссией на базе микропроцессорной техники.
Для более точной установки кранового распределителя .5 нп втором этаг.р переключения используется устройство позиционирования, выполненное в-виде гидроцилиндра 22. При отпускании рычага 25 в исходное положение после подачи команды на переключение ступени и отработки гидрошшнндров 8 и 9 вновь включаются замыкающие контакты переключателя 26 или 27 и электромагнитный клапан 21 переходит в пер5 вую (исходную) позицию, в которой его первая линия (вход) сообщена с третьей (выходом) и в напорной полости гидроцилиндра 23 создается давление рабочей жидкости. В гидроцилиндрах путем варьирования величинами площади поршня и давления жидкости можно получить достаточно большие усилия на штоке. Под действием указанного усилия торец 35 штока 23 входит
конической поверхностью 36 в межроликовое пространство. Допустим, ось штока не совпадает г биссектрисой. угла между осями двух смежных роликов, т.е. имеется некоторая погрешность в угловом позиционировании звена 14. В этом случае коническая поверхность 36 скользит по поверхности одного из роликов и под действием тангенциальной с цилиндрической поверхности ролика составляющей усилия на штоке 23 звено 1А (соответственно и крановый распределитель 5), занимают требуемое точное угловое положе- ние, определяемое координатами роликов, В этом случае исключена вероятность накопления погрешности при большом числе циклов срабатывания устройства, так как компенсация ее про- исходит при каждом переключении.
Формула изобретения
Устройство управления многоступенчатой трансмиссией, содержащее шаго- вый привод, включающий два гидроцилиндра, поворотное выходное звено с равномерно расположенными по окружности роликами, фиксатор, рабочая поверхность которого выполнена в виде конуса, два двухпозиционных трехлинейных электромагнитных клапана для управления гидроцилиндрами шагового привода, устройство управления электромагнитными клапанами с источни- ком питания, причем поворотное выходное звено схематически связано с многопозиционным крановым распределителем, который соединяет гидроцилиндры управления фрикционными муфтами и тормозами с источником давления рабочей жидкости, отличающееся тем, что, с целью повышения надежности работы устройства управления многоступенчатой трансмиссией путем компенсации погрешности углового перемещения выходного звена шагового привода, оно снабжено дополнительным двухпозиционным трехлинейным электромагнитным клапаном, фиксатор выполнен в виде гидроцилиндра с подпружиненным штоком, полость которого соединена с одним из выходов дополнительного электромагнитного клапана, другой выход соединен со сливом, а вход - с источником давления рабочей жидкости, при этом устройство управления электромагнитными клапанами выполнено в виде двух переключателей, при этом вход одного из них соединен с источником, а выходы - соответственно с первым электромагнитным клапаном и входом второго переключателя, выходы которого соединены с вторым и дополнительным электромагнитными клапанами.
Составитель А.Барыков Редактор 0.Головач Техред Л.Сердюкова Корректор Н.Король
Заказ 460
Тираж 419
ВНИИПИ Государственного комитета по изобретениям и открытиям при ГКНТ СССР 113035, Москва, Ж-35, Раушская наб., д. 4/5
Производственно-издательский комбинат Патент, г. Ужгород, ул. Гагарина, 101
фиг. I
Подписное
| Устройство управления многоступенчатой трансмиссией | 1985 |
|
SU1369936A1 |
| Способ получения молочной кислоты | 1922 |
|
SU60A1 |
