Изобретение относится к области машиностроения, в частности к гидроприводам исполнительных механизмов, и может быть использовано в станкостроении для технологического оборудования, например для поворотно-делительных механизмов металлорежущих станков.
Известен привод (см. Авт. Свид. СССР №307207, F15B 15/20, 1969 г.), который может быть использован в станкостроении для безупорной остановки исполнительного органа в заданной координате. Недостатками этого устройства являются сложность схемы привода, низкая скорость подхода исполнительного органа к заданной координате и недостаточная точность позиционирования.
В качестве прототипа выбран гидропривод (см. Авт. Свид. СССР SU 1418512, F15B 11/12, Бюллетень №31, 23.08.88), который для достижения точности, быстродействия и надежности устройства путем предварительного торможения снабжен дополнительной гидролинией, сообщающей управляющую полость клапана с входной линией кранового распределителя. Однако этот гидропривод имеет ряд недостатков по сравнению с предлагаемым решением. В организации позиционного цикла участвуют различные управляющие устройства. При разгоне - распределители 6, 16, при этом клапан 20, оставаясь подпорным, создает противодавление, препятствующее эффективному разгону гидродвигателя. Разгон осуществляется с задержкой во времени, обусловленной повышением давления в напорной полости гидродвигателя 3 до рабочего. Противодавление, создаваемое клапаном 20, повышает достигаемое противодавление на входе. При замедлении - давление клапана 20 на участке замедления определяется предварительной настройкой пружины и давлением в напорной полости гидродвигателя. Возможности управления замедлением «на ходу» отсутствуют. При останове по команде от кранового распределителя 5 срабатывает распределитель 10, включая механический тормоз 7 с задержкой, обусловленной нестабильностью крутящего момента от сил трения дисков, а также вызывая существенный нагрев. Учитывая нестабильность процесса трения и постоянную жесткость пружины 8, не представляется возможным эффективно управлять процессом останова. В данных условиях контур гидравлического управления разветвленный (большие объемы в каналах управления, потери энергии), что сказывается на быстродействии в процессе позиционирования. Применение в известном схемотехническом решении распределителя 6, обеспечивающего реверсивность привода, нецелесообразно, поскольку для поворотно-делительных механизмов технологического оборудования, таких как поворотные столы, револьверные головки и т.д., поворот исполнительного механизма достаточно осуществлять в одном направлении во избежание возникающих разносторонних динамических нагрузок (удары в ППМ - люфты, зазоры), к тому же наличие распределителя приводит к уменьшению быстродействия системы (дополнительное местное сопротивление, время срабатывания, переключение распределителя в другую позицию и т.д.).
Целью изобретения является повышение точности позиционирования, надежности и быстродействия привода за счет обеспечения стабильной точности выбега вала гидродвигателя при максимальном быстродействии. Техническая цель изобретения достигается тем, что в гидравлическом позиционном приводе, содержащем напорную и сливную гидролинии, гидродвигатель с выходным звеном, кинематически связанным с крановым распределителем, управляемым распределителем грубого отсчета, датчик грубого отсчета, гидроуправляемый клапан, установленный в сливной гидролинии, и распределитель гидроуправляемого тормоза, привод снабжен распределителем с электромагнитным управлением, установленным в напорной гидролинии, и трехпозиционным распределителем с гидроуправлением, один вход и первый управляющий элемент которого соединены посредством гидролиний с выходом распределителя с электромагнитным управлением, другой вход трехпозиционного распределителя соединен со сливной гидролинией гидродвигателя, а второй его управляющий элемент связан с выходом кранового распределителя, который своим входом соединен с выходом распределителя грубого отсчета, подключенного входом к напорной гидролинии, при этом выход трехпозиционного распределителя связан с заклапанной полостью гидроуправляемого клапана, а крановый распределитель снабжен кинематически связанным с ним автономным задатчиком перемещения.
На чертеже приведена принципиальная гидрокинематическая схема предлагаемого гидравлического позиционного привода.
Гидравлический позиционный привод в своем составе содержит силовой контур и контур управления. Силовой контур включает напорную 1, сливную 2 гидролинии, гидродвигатель 3 с выходным звеном 4, кинематически связанный с крановым распределителем 5 с поворотной и установочной втулками с окнами, автономный задатчик перемещения 6, гидроуправляемый тормоз 7, размещенный с возможностью взаимодействия с выходным звеном 4 гидродвигателя 3 и подключенный к распределителю 8 с электромагнитным управлением, и бак 9.
Многофункциональное гидромеханическое управляющее устройство в составе контура управления включает гидроуправляемый клапан 10, распределитель 17 с электромагнитным управлением, управляющий трехпозиционным распределителем 14 с гидроуправлением, и распределитель 8 гидроуправляемого тормоза 7.
Гидроуправляемый клапан 10 своей заклапанной полостью 11 связан посредством гидролинии 12 с выходом 13 трехпозиционного распределителя 14, а также с фильтром 15 и теплообменным аппаратом 16.
Распределитель 17 с электромагнитным управлением, установленный в напорной гидролинии 1, соединен на выходе гидролинией 18 со входом 19 трехпозиционного распределителя 14 и линией 20 с управляющим элементом 21 трехпозиционного распределителя 14, вход 22 которого соединен гидролинией 23 со сливной гидролинией 2. Управляющий элемент 24 трехпозиционного распределителя 14 связан гидролинией 25 с выходом кранового распределителя 5, вход которого соединен с выходом распределителя грубого отсчета 26, вход которого подключен к напорной гидролинии 1. Распределитель 17 с электромагнитным управлением снабжен датчиком грубого отсчета 27. Угловые координатные перемещения выходного звена 4 обеспечивает гидродвигатель 3 (через передаточно-преобразующий механизм), управляемый крановым распределителем 5, кинематически связанным с валом гидродвигателя 3. Положение гидроуправляемого клапана 10 определяется уровнем управляющего давления, подводимого в его заклапанную полость 11 и формируемого трехпозиционным распределителем 14.
Положение золотника трехпозиционного распределителя 14 определяется управляющими сигналами в гидравлических линиях связи 20 и 25 его управления соответственно от распределителей 17 и 5 при совмещении рабочих окон втулок кранового распределителя 5. Очередное угловое перемещение выходного звена 4 задается автономным задатчиком перемещения 6. При подаче сигнала (после отработки рабочего движения) на электромагнит распределителя 17 жидкость поступает к трехпозиционному распределителю 14, обеспечивая гидравлический сигнал линии 18 и подвод этого сигнала в заклапанную полость 11 гидроуправляемого клапана 10, открывая его. При этом обеспечивается разгон гидродвигателя 3 до максимальной скорости. Система управления (счетчик или программируемый контроллер и датчик грубого отсчета 27) следит за поворотом вала гидродвигателя 3 при прохождении «точки замедления» и отключает электромагнит распределителя 17. Гидроуправляемый клапан 10 переходит в режим подпорного клапана. Противодавление на сливной гидролинии 2 гидродвигателя 3 увеличивается, а скорость вращения его вала уменьшается.
Распределитель грубого отсчета 26 управляет крановым распределителем 5. За один оборот поворотной втулки кранового распределителя 5 до «останова» включается электромагнит распределителя грубого отсчета 26. При движении с замедлением происходит совмещение рабочих окон втулок кранового распределителя 5, что соответствует координате, заданной автономным задатчиком перемещения 6. В гидролинии 25 формируется сигнал управления, переключающий трехпозиционный распределитель 14. При этом давление в заклапанной полости 11 гидроуправляемого клапана 10 уменьшается, и он закрывается под действием пружины, перекрывая слив. Гидродвигатель 3 останавливается. В момент «останова» гидродвигателя 3 срабатывает распределитель 8 гидроуправляемого тормоза 7, что обеспечивает фиксацию выходного звена 4 гидродвигателя 3.
Автономный задатчик перемещения 6 адаптирует гидравлический привод к меняющимся скоростным характеристикам, обеспечивает смещение координаты позиционирования в зависимости от скорости подхода к координате. Датчик грубого отсчета 27 дает информацию о скорости подхода к координате, а электронная система управления обеспечивает согласование сигналов датчика грубого отсчета 27 и автономного задатчика перемещения 6. Автономный задатчик перемещения 6 - устройство, управляющее поворотной втулкой кранового распределителя 5 и корректирующее момент совмещения его рабочих окон при подходе к координате позиционирования. В качестве автономного задатчика перемещения 6 может быть использован шаговый электродвигатель.
Измерение величины перемещения выходного звена 4 гидродвигателя 3 осуществляется в заявляемом приводе по 2 отсчетной системе - грубого и точного отсчета.
Система грубого отсчета (распределитель грубого отсчета 26, распределитель 17 с электромагнитным управлением и датчик грубого отсчета 27) фиксирует количество дискрет, соответствующих количеству оборотов поворотной втулки кранового распределителя 5, имеющего кинематическую связь с гидродвигателем 3.
Распределитель грубого отсчета 26 - это устройство, включение которого происходит в момент подачи сигнала на его управляющий элемент (электромагнит). Датчик грубого отсчета 27 представляет собой дискретный датчик, срабатывающий на каждом обороте поворотной втулки кранового распределителя 5.
Сигнал от датчика грубого отсчета 27 поступает в систему управления, которая обрабатывает его и преобразует в управляющее воздействие для автономного задатчика перемещения 6. Данная задача решается на базе программируемого логического контроллера.
Система точного отсчета перемещения срабатывает при совмещении рабочих окон втулок кранового распределителя 5 в пределах заданной угловой дискреты. Например, для прототипа привода - координатно-сверлильного станка поворотно-делительного стола при обработке большого количества отверстий в деталях типа «фланец» угловая дискрета перемещения составляет 15°, а возможные угловые координаты - 45°, 60°, 75°, 90° и др.
Предлагаемый привод может найти применение в станкостроении, например для поворотно-делительных механизмов металлорежущих станков (револьверные головки, поворотные столы).
| название | год | авторы | номер документа |
|---|---|---|---|
| Гидравлический позиционный привод | 1986 |
|
SU1418512A1 |
| Гидравлический позиционный привод | 1988 |
|
SU1541422A1 |
| Гидравлический позиционный привод | 1985 |
|
SU1280207A1 |
| Гидравлический позиционный привод | 1988 |
|
SU1668746A1 |
| Гидравлический позиционный привод | 1987 |
|
SU1460436A2 |
| УСТРОЙСТВО ДЛЯ ПОДАЧИ ДЛИННОМЕРНОГО ПРОКАТА В ЗОНУ ОБРАБОТКИ | 1994 |
|
RU2104115C1 |
| Протаскивающее устройство лесозаготовительной машины | 1988 |
|
SU1576323A1 |
| Гидравлический позиционный привод | 1984 |
|
SU1177559A1 |
| Гидросистема | 1985 |
|
SU1288380A1 |
| Гидравлическая система дистанционного управления тормозом грузоподъемного механизма | 1983 |
|
SU1138550A1 |
Изобретение относится к области машиностроения, в частности к гидроприводам исполнительных механизмов. Привод содержит напорную и сливную гидролинии, гидродвигатель с выходным звеном, кинематически связанным с крановым распределителем, управляемым распределителем грубого отсчета, датчик грубого отсчета, гидроуправляемый клапан, установленный в сливной гидролинии, и распределитель гидроуправляемого тормоза, при этом привод снабжен распределителем с электромагнитным управлением, установленным в напорной гидролинии, и трехпозиционным распределителем с гидроуправлением, один вход и первый управляющий элемент которого соединены посредством гидролиний с выходом распределителя с электромагнитным управлением, другой вход трехпозиционного распределителя соединен со сливной гидролинией гидродвигателя, а второй его управляющий элемент связан с выходом кранового распределителя, который своим входом соединен с выходом распределителя грубого отсчета, подключенного входом к напорной гидролинии, при этом выход трехпозиционного распределителя связан с заклапанной полостью гидроуправляемого клапана, а крановый распределитель снабжен кинематически связанным с ним автономным задатчиком перемещения. Технический результат - повышение точности позиционирования. 1 ил.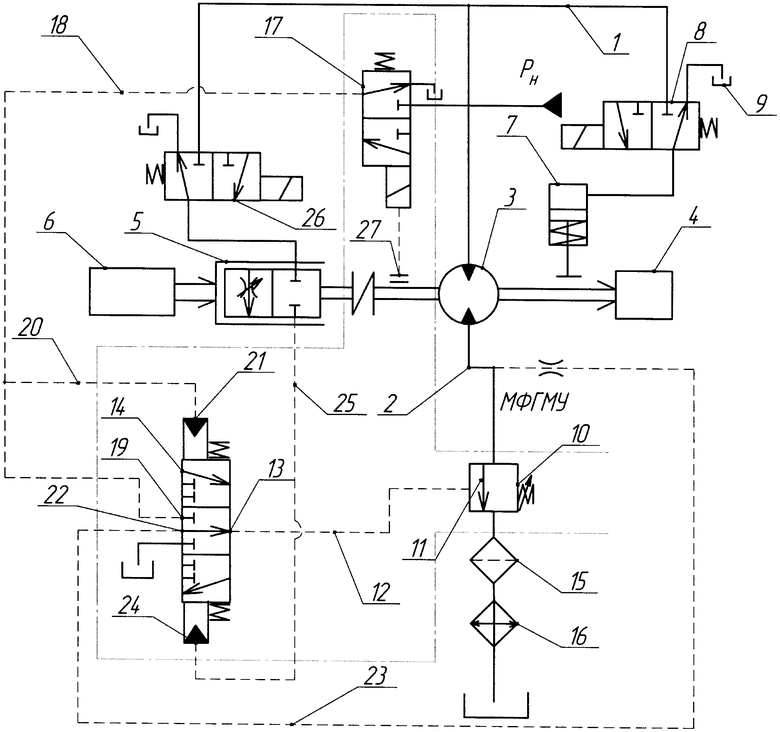
Гидравлический позиционный привод, содержащий напорную и сливную гидролинии, гидродвигатель с выходным звеном, кинематически связанным с крановым распределителем, управляемым распределителем грубого отсчета, датчик грубого отсчета, гидроуправляемый клапан, установленный в сливной гидролинии, и распределитель гидроуправляемого тормоза, отличающийся тем, что привод снабжен распределителем с электромагнитным управлением, установленным в напорной гидролинии, и трехпозиционным распределителем с гидроуправлением, один вход и первый управляющий элемент которого соединены посредством гидролиний с выходом распределителя с электромагнитным управлением, другой вход трехпозиционного распределителя соединен со сливной гидролинией гидродвигателя, а второй его управляющий элемент связан с выходом кранового распределителя, который своим входом соединен с выходом распределителя грубого отсчета, подключенного входом к напорной гидролинии, при этом выход трехпозиционного распределителя связан с заклапанной полостью гидроуправляемого клапана, а крановый распределитель снабжен кинематически связанным с ним автономным задатчиком перемещения.
| Гидравлический позиционный привод | 1986 |
|
SU1418512A1 |
| Гидравлический позиционный привод | 1985 |
|
SU1280207A1 |
| Гидравлический позиционный привод | 1988 |
|
SU1541422A1 |
| Гидравлический позиционный привод | 1988 |
|
SU1668746A1 |
| ТЕПЛОВЫДЕЛЯЮЩАЯ СБОРКА ЯДЕРНОГО РЕАКТОРА | 2003 |
|
RU2256243C2 |
| Способ агломерации фосфатного сырья | 1987 |
|
SU1528726A1 |

