хЪ
ail
7
(Л
00 О)
со со со о:
ailJi -J
держащего гидроцилиндры 8 и 9, штоки 12 и 13 которых коромыслами воздействуют на ролики 42 выходного звена 14, связанного с распределителем,Грубое позиционирование звена 14 осуществляется штоками 12 и 13, ход которых предварительно дискретно регулируется ограничителями с замками. Точнее позиционирование осуществляется фиксатором, усилие которого больше сопротивления повороту выходного звена 14. Это исключает потребность в концевых выключателях, отключающих гидроцилиндры в конце хода, и упрощает конструкцию, а также повышает ее надежность. 7 ил.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство управления многоступенчатой трансмиссией | 1988 |
|
SU1544597A1 |
| Устройство управления многоступенчатой трансмиссией | 1989 |
|
SU1682217A1 |
| Устройство управления многоступенчатой передачей транспортного средства | 1985 |
|
SU1341072A1 |
| ГИДРАВЛИЧЕСКИЙ ПОЗИЦИОННЫЙ ПРИВОД | 2009 |
|
RU2458261C2 |
| Гидрообъемная трансмиссия транспортного средства | 1987 |
|
SU1463528A1 |
| УСТРОЙСТВО ДЛЯ ПОВОРОТА ВАЛА ОБОРОТНОГО ПЛУГА | 2004 |
|
RU2262821C1 |
| ГИДРОСИСТЕМА МНОГОДИАПАЗОННОЙ МНОГОПОТОЧНОЙ ЭЛЕКТРОМЕХАНИЧЕСКОЙ ТРАНСМИССИИ | 2014 |
|
RU2555576C1 |
| Система управления гидромеханической коробкой передач транспортного средства | 1985 |
|
SU1316859A1 |
| Система рулевого управления автопоезда | 1987 |
|
SU1474016A1 |
| Гидрообъемная трансмиссия транспортного средства | 1988 |
|
SU1588578A1 |
Изобретение относится к дистанционному управлению многоступенчатыми трансмиссиями транспортных средств, преимущественно большой мощности и грузоподъемности, с помощью многопозиционных крановых распределителей, которые проще и безопасней обычных золотниковых механизмов. Цель изобретения - повышение надежности работы. Пошаговый поворот кранового распределителя осуществляется по командам электрогидравлического командного блока с помощью шагового привода, со
1
Изобретение относится к транспортной технике и может быть использовано для дистанционного управления многоступенчатыми трансмиссиями, преимущественно транспортных средств большой мощности и грузоподъемности.
Цель изобретения - повышение надежности работы.
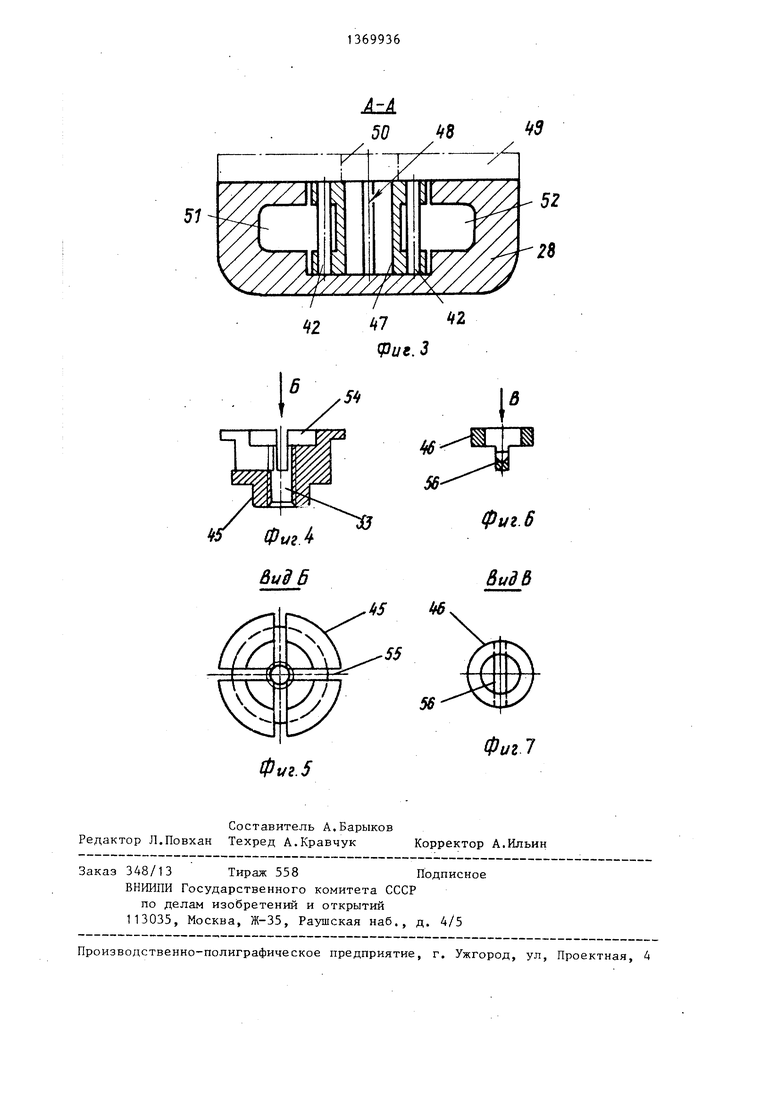
На фиг. 1 показана схема устройства управления трансмисии; на фиг..2 устройство шагового привода; на фиг. 3 - разрез А-А на фиг. 2 на фиг. 4 - ограничитель хода поршней гидроцилиндра шагового привода на фиг. 5 - вид Б на фиг. 4j на фиг. 6 - замковая втулка ограничителя; на фиг. 7 - вид В на фиг. 6.
Трансмиссия 1 (фиг. 1) содержит гидроцилиндры 2 управления фрикционными муфтами и тормозами для включения различных передаточных чисел многоступенчатого зубчатого механизма (не показаны). Для соединения гидроцилиндров 2 с напорной гидролинией 3 гидростанции 4 либо со сливом служит многопозиционный крановый распределитель 5, число угловых положений которого равно числу ступеней трансмиссии плюс нейтрали.
Шаговый механизм управления трансмиссией содержит шаговый привод 6, устанавливаемый непосредственно на трансмиссии, и электрогидравлический командный блок 7.
Шаговый привод 6 содержит два расположенных вертикально гидроцилиндра 8 и 9 с подпружиненными поршнями 10 и 11 штоками 12 и 13, на которых шарнирно закреплены собачки храпового механизма, и поворотное выходное звено 14, установленное соосно крановому распределителю 5 и кинематически связанное с нш.
Командный блок 7 содержит установленные на трансмиссии электромагнитные двухпозиционные трехлинейные клапаны 15 и 16, первые линии которых сообщены с напорной гидролинией 3 гидростанции 4, вторые - со сливом,
а третьи - гидролиниями 17 и 18 с напорными полостями гидроцилиндров 8 и 9 шагового механизма 6, Напорная полость каждого гидроцилиндра сообщена гидролинией 19 или 20 со штоковой полостью другого гидроцилиндра. Блок 7 содержит также устройство 21 формирования электрических сигналов на пошаговое переключение выходного звена 14. Формирование указанных сигналов может выполняться, например, с помощью рычага 22, воздействие на который вызывает поочередное замыкание нормально разомкнутых электрических контактов 23 и 24„ Последние
включены в цепи 25 и 26 электропитания электромагнитных клапанов 15 и 16 от бортовой электросети 27 транспортного средства.
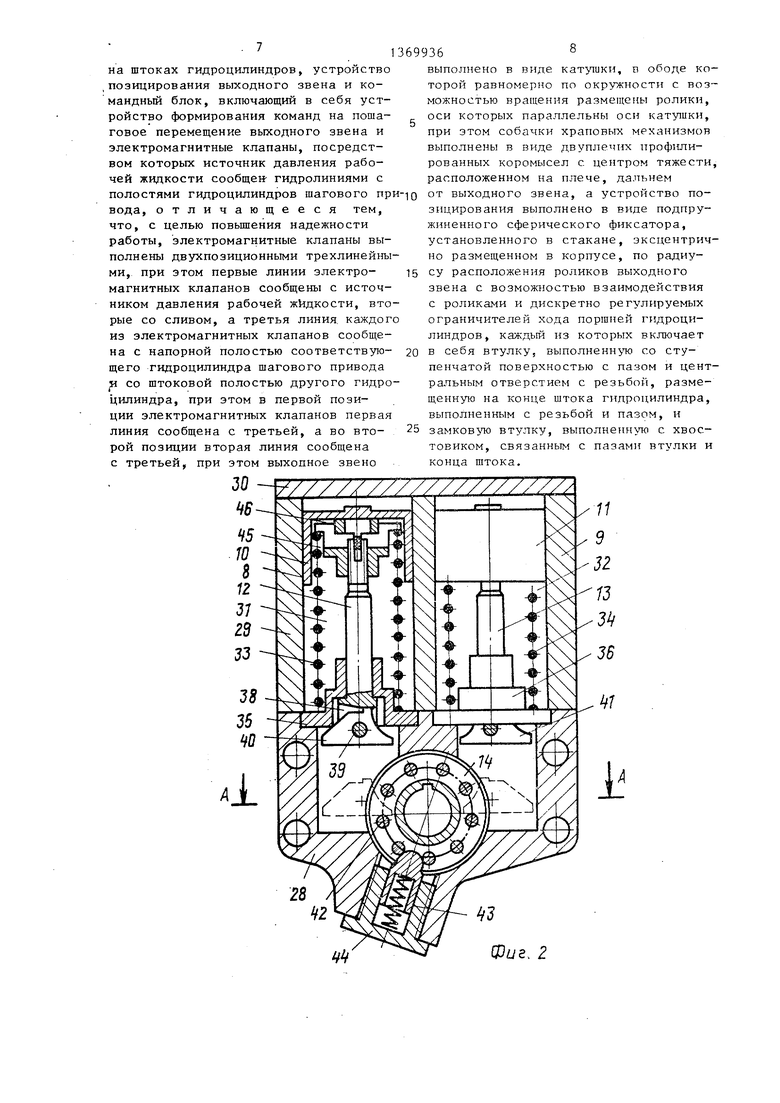
Шаговый механизм имеет разъемньй корпус, состоящий из основания 28 (фиг. 2), в расточке которого помещено выходное звено 14, и блока цилиндров 29, закрытого крьппкой 30. Блок 29 имеет два отверстия 31 и 32, в которых помещены поршни 10, 11,
штоки 12 и 13 и пружины 33 и 34. Днища гидроцилиндров выполнены в виде съемных втулок 35 и 36, имеющих фланцы для фиксации в расточках основания 28. Центральные отверстия втулок 35 и 36 служат направляющими штоков 12 и 13. В гнездо 37 втулки 35 входит
заплечик 38 штока 12. В пазу заплеч ка 38 на оси 39 помещена собачка хра пового механизма, выполненная в виде плоского двуплечего профилированного коромысла 40, центр тяжести которого расположен на плече, дальнем от выходного звена 14. Аналогичное устройство и собачку 41 имеет гидроцилиндр 9,- элементы которого на фиг. 2 не разрезаны. Выходное звено 14 выполнено в виде катушки с осевыми отвер стиями в ободе, расположенными на окружности, концентричной его оси, в которых установлены с возможностью вращения ролики 42. Число роликов равно числу позиций кранового распределителя 5 (фиг. 1).
Устройство позиционирования выходного звена 14 выполнено в виде подпружиненного сферического фиксатора 43, помещенного по радиусу окружности расположения роликов 42 в эксцентричном отверстии поворотного стакана 44, -дискретно регулируемых резьбовых ограничителей 45 хода порш ней 10 и 11 и замковых втулок 46 (фиг. 2-7). Ограничитель и втулка гидроцилиндра 9 на фиг. 2 не показаны.
Выходное звено 14 центрируется в отверстии основания 28 (фиг. 3) и имеет отверстие 47 и шпоночный паз 48 для соединения с хвостовиком кранового распределителя 5 (не показан) Отверстие 47 может быть закрыто крьш кой 49 с отверстием 50 либо торцом самого распределителя 5 (не показан) в варианте со стыковым креплением. В основании 28 имеются также пазы 51 и 52 для перемещения штоков 12 и 13. Ограничитель 45 имеет резьбовое отверстие 53 (фиг. 4) для соединения со штоками 12 и 13, гнездо 54 для установки замковой втулки 46 и несколько (например четыре, фиг. 5) пазов 55/
Замковая втулка 46 имеет хвостовик 56 (фиг. 6 и 7), который входит в пазы 55 ограничителя 45 и аналогич ные пазы на резьбовых концах штоков 12 и 13 (фиг. 2).
Конфигурация коромысел 40 и 41 (фиг. 2) обеспечивает возможность их поворота в одном из направлений относительно осей 39 (после выдвижения штока 12 или 13 вниз) на такой угол, чтобы проекции их на плоскость перпендикулярно оси штоков не пере69936 . 4
секались с проекций на ту же плоскость траекторий движения роликов 42,
Устройство работает следующим образом.
При отсутствии давления жидкости в напорных полостях гидроцилиндров 8 и 9 детали шагового механизма на10 ходятся в положении, изображенном на фиг. 2.-Для переключения с одной ступени трансмиссии 1 на соседнюю поворачивают крановый распределитель 5 на один шаг. При зтом установка рас15 пределителя 5 в новое положение происходит в два этапа: предварительное (грубое) и точное позиционирование,
Т, этап. Для поворота, например, против часовой стрелки воздействием
20 на рычаг 22 замыкают контакт 24 и удерживают рычаг 22 в данном положении до окончания переключения. При этом срабатывает электромагнитный клапан 16 и подает давление от гид25 ростанции 4 по гидролиниям 3 и 18 в напорную полость гидроцилиндра 8. Поршень 10 под действием давления перемещает шток 12 вниз, сжимая пр жину 33. В период свободного хода штока
30 12 коромысло 40 удерживается в исходном положении силами тяжести, поскольку их центр смещен относительно оси 39 влево. При встрече коромысла 40 с роликом 42 усилие поршня 8 вы- 22 зывает вращение выходного звена 14
против часовой стрелки. При этом фиксатор 43 утапливается в отверстии втулки 44 роликами 42. При упоре
во втулку 35 ограничителя 45 выход- 40 ное звено 14 останавливается.
При отпускании рычага 22 размыкается контакт 24, выключается клапан 16, поршень 10 и шток 12 возвращают- ся в исходное положение пружиной 33. 45 Во время хода штока 12 вверх коромысло 40, задевая правым плечом за расположенный над ним ролик 42, поворачивается По часовой стрелке и свободно проходит мимо него. При дальнейшем
50 движении левое плечо, приподнятое
вверх, соприкасается с кромкой гнезда - 37 втулки 35, что приводит к повороту его против часовой стрелки и возврату в исходное положение (фиг. 2), Этим gg обеспечивается надежный принудительный возврат коромысла 40 в исходное положение и удержание его до следую- щего срабатывания. На этом Т-й атап заканчивается.
51369936
1-й этап,Требуемое положение расбоба ро та ти та ав ля го ет хо ко
пределителя 5 соответствует такому положению выходного звена 14, в котором фиксатор 43 контактирует с двум роликами 42 одновременно. При грубом позиционировании посредством гидроцилиндра 8 на 1-м этапе, описанном вы-г ше, выходное звено может остановиться в положении, при котором фиксатор контактирует только с одним из роликов 42. В ЭТОМ случае усилие фиксатора 43 создает на выходном звене 14 крутящий момент, который превышает момент сопротивления бт краново- го распределителя. Поворот продолжается до тех пор, пока второй из соседних роликов не войдет в контакт . с фиксатором 43. Таким образом происходит автоматическое точное позицио- нирование выходного звена 14 и распределителя 5. Очевидно, что момент, создаваемый фиксатором, тем больше, чем меньше требуемый угол поворота, который зависит от величины ошибки грубого поз1щионирования. Усилие фиксатора выбирается таким, чтобы обеспечить автоматическое точное позиционирование при заданных пределах
ошибки грубого позиционирования, Пос- зо собен самостоятельно закончить поволедние определяются точность -; регулировки хода штока 12 органичите- лем 45.
Для уменьшения ошибки грубого позиционирования регулировку хода штока 12 выполняют следующим образом. Снимают крышку 30, блок 29 и поршни 10 и 11. Точно устанавливают выходное звено 14 в любое из рабочих положений. Поворачивая стакан 44, обес- до Р этом в контакте ийеет меспечивают контакт фиксатора 43 с двумя роликами 42 и фиксируют стакан 44 (элементы фиксации не показаны). Враща я ограничитель 45, устанавливают такой ход штока 12, чтобы при его нижнем положении коромысло 40 находилось в положении, показанном пунктиром на фиг. 2. После этого поворачивают ограничитель 45 до совпадения одного из его пазов 55 с пазом штока 12 и устанавливают в гнездо 54 замок 46. При этом ошибка грубого позиционирования будет не более шага резьбы ограничителя 45, деленного на число пазов 55. Конструктивно она не превышает 0,5-1 мм, что облегчает автоматическое позиционирование. Аналогично регулируют ход штока 13.
Помимо устранения погрешности грубого позиционирования при каждом срабатывании автоматическое позиционирование фиксатором 43 предотвращает также накопление указанной погрешности, которое наблюдается по мере роста числа срабатываний. Таким образом, автоматическое позиционирование является неотъемлемым элементом данного механизма. Одновременно оно снижает требование к точности установки хода штоков 12 и 13, что упрощает конструкцию и регулировку.
Перекрестное соединение напорных и штоковых полостей гидроцилиндров 8 и 9 обеспечивает принудительньй возврат поршня нерабочего гидроцилиндра в исходное положение. Это позволяет при несрабатывании механизма на переключение ступеней в одном направлении в результате заклинивания поршня в нижнем положении восстановить работоспособность, прикладывая к указанному поршню усилие от давления жидкости в дополнение к усилию пружины. При заклинивании поршня 10 или 11 в промежуточном положении в конце рабочего хода фиксатор 43 спо5
рот выходног.о звена 14. Заклиненный поршень может быть затем освобожден и возвращен в исходное положение как описано вьш1е.
Ролики 42 при взаимодействии с коромыслом 40 во время рабочего хода штока 12 и с фиксатором 43 при автоматическом позиционировании проворачиваются в отверстиях выходного зве
то трение качения, что уменьшает потребные усилия гидроцилиндров 8 и 9 и пружины фиксатора, а также исключает заклинивание и уменьшает износ элементов привода.
Формулл изобретения
Устройство управления многоступен- чатой трансмиссией, содержащее шаго- вый привод выполненный в виде размещенных в корпусе поворотного выходного звена двух гидроцилиндров с напорными и штоковыми полостями и под- пружиненными поршнями, размещенными по обе стороны от оси вращения выходного звена с возможностью взаимодействия с последним посредством собачек храповых механизмов, закрепленных
на штоках гидроцилиндров, устройство ,поэицирования выходного звена и командный блок, включающий в себя устройство формирования команд на пошаговое перемещение выходного звена и электромагнитные клапаны, посредством которых источник давления рабочей жидкости сообщен гидролиниями с полостями гидроцилиндров шагового пр вода, отличающееся тем, что, с целью повьшения надежности работы, электромагнитные клапаны выполнены двухпоэициоиными трехлинейными, при этом первые линии электромагнитных клапанов сообщены с источником давления рабочей жЬдкости, вторые со сливом, а третья линия каждог из электромагнитных клапанов сообщена с напорной полостью соответствующего гидроцилиндра шагового привода со штоковой полостью другого гидроцилиндра, при этом в первой позиции электромагнитных клапанов первая линия сообщена с третьей, а во второй позиции вторая линия сообщена с третьей, при этом выходное звено
30
о
699368
выполнено в виде , Б ободе которой равномерно по окружности с возможностью вращения размещены ролики, оси которых параллельны оси катушки, при этом собачки храповых механизмов выполнены в виде двуплечих профилированных коромысел с центром тяжести, расположенном на плече, дальнем от выходного звена, а устройство по- зицирования выполнено в виде подпружиненного сферического фиксатора, установленного в стакане, эксцентрично размещенном в корпусе, по радиусу расположения роликов выходного звена с возможностью взаимодействия с роликами и дискретно регулируемых ограничителей хода поршней гидроцилиндров, каждьм из которых включает в себя втулку, выполненн то со ступенчатой поверхностью с пазом и центральным отверстием с резьбой, размещенную на конце штока гидроцилиндра, выполненным с резьбой и пазом, и замковую втулку, выполненную с хвостовиком, связанным с пазами втулки и конца штока.
15
0
5
Фие. 2
51
Фuг.S
Фиг 7
| 1970 |
|
SU423685A1 | |
| Способ получения молочной кислоты | 1922 |
|
SU60A1 |
