сп
4Ь Јь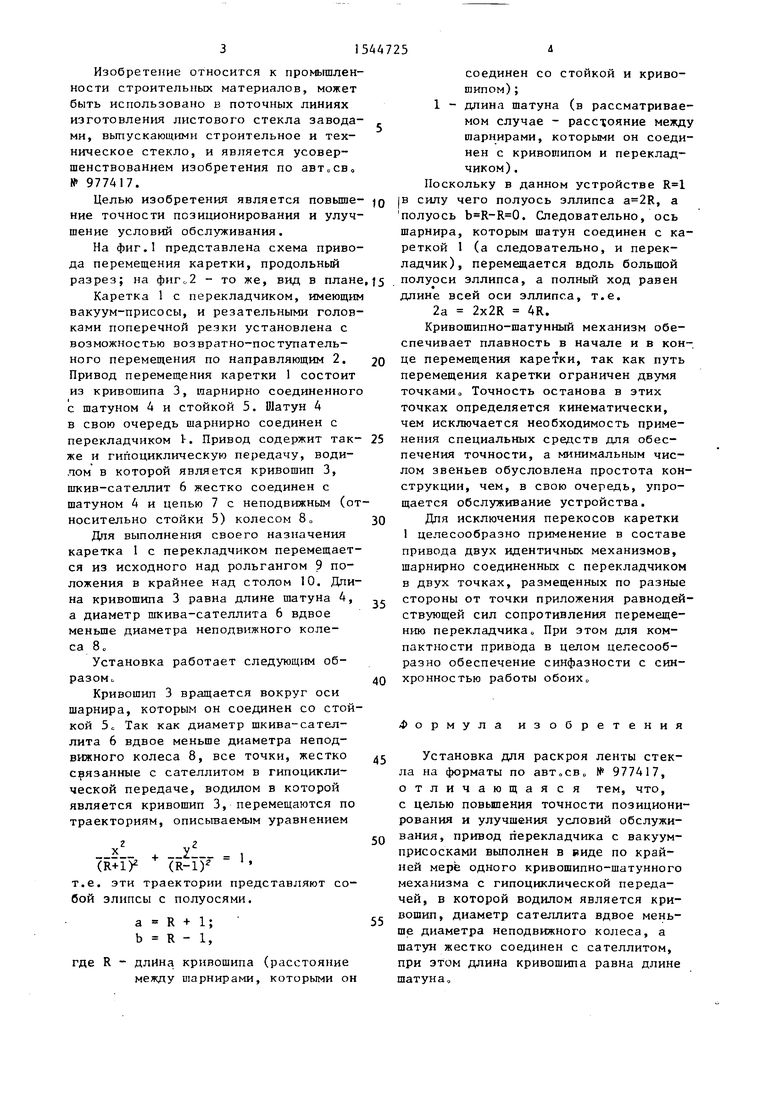
| название | год | авторы | номер документа |
|---|---|---|---|
| Манипулятор для передачи изделий | 2023 |
|
RU2822908C1 |
| Привод штанговой скважинной насосной установки | 2023 |
|
RU2820080C1 |
| Манипулятор с возвратно-поступательным движением захватных устройств | 2023 |
|
RU2822909C1 |
| Встряхиватель для пробирок | 2023 |
|
RU2821211C1 |
| Лабораторный встряхиватель | 2023 |
|
RU2819973C1 |
| Планетарный зубчатый привод стеклоочистителя | 2023 |
|
RU2815138C1 |
| Зубчатый механизм пресса | 2023 |
|
RU2817027C1 |
| Орнитоптер | 2023 |
|
RU2810824C1 |
| ПРИВОД ПЕРЕМЕЩЕНИЯ КЛЕТИ СТАНА ХОЛОДНОЙ ПРОКАТКИ ТРУБ | 1990 |
|
RU2030228C1 |
| Планетарный механизм перемещенияКлЕТи CTAHA ХОлОдНОй пРОКАТКи ТРуб | 1979 |
|
SU829232A1 |
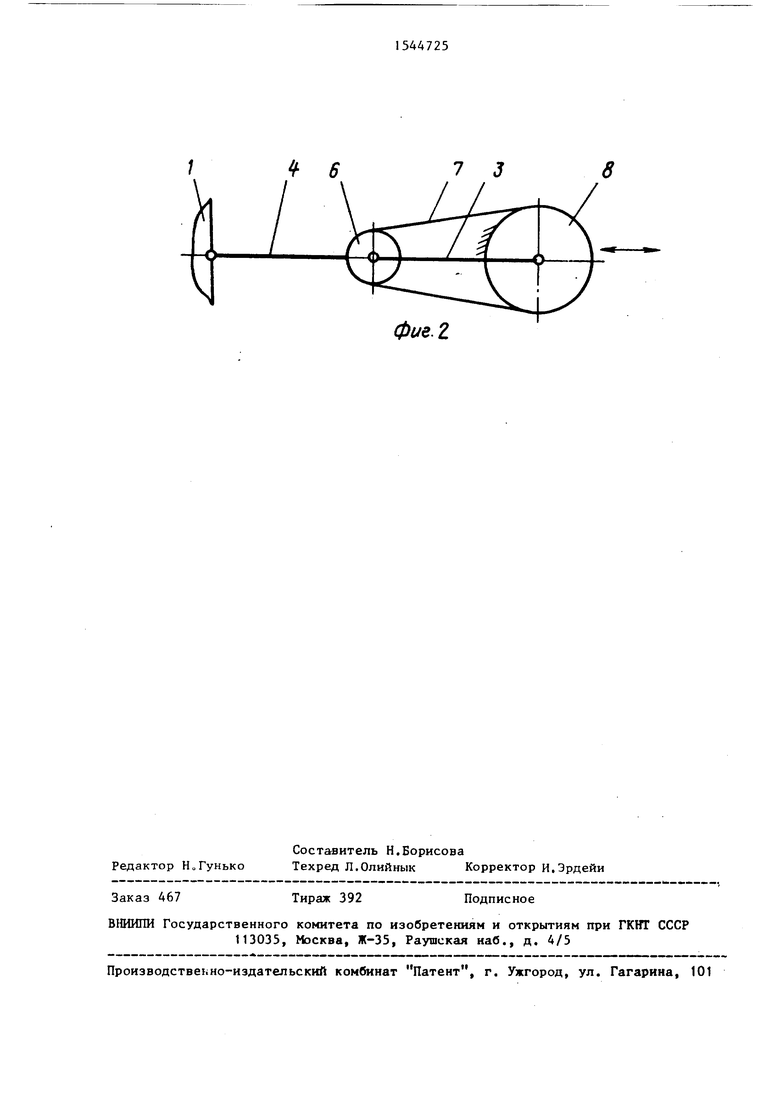
Изобретение относится к промышленности строительных материалов и может быть использовано в поточных линиях изготовления листового стекла заводами, выпускающими строительное и техническое стекло. Цель изобретения - повышение точности позиционирования и улучшение условий обслуживания. Установка для раскроя ленты стекла на форматы содержит каретку 1 с перекладчиком, имеющим вакуум-прессы, установленную с возможностью возвратно-поступательного перемещения по направляющим 2. Привод перемещения каретки 1 выполнен в виде кривошипно-шатунного механизма с гипоциклической передачей, в которой водилом является кривошип 3, диаметр сателлита 6 вдвое меньше диаметра неподвижного колеса 8, а шатун 4 жестко соединен с сателлитом 6, при этом длина кривошипа 3 равна длине шатуна 4. Устройство позволяет исключить перекосы перекладчика. 2 ил.
го
Фиг.1
Изобретение относится к промышленности строительных материалов, может быть использовано в поточных линиях изготовления листового стекла заводами, выпускающими строительное и техническое стекло, и является усовершенствованием изобретения по автосв, № 977417.
Целью изобретения является повыше- ние точности позиционирования и улучшение условий обслуживания.
На фиг.1 представлена схема привода перемещения каретки, продольный разрез; на фиг,2 - то же, вид в плане
Каретка 1 с перекладчиком, имеющим вакуум-присосы, и резательными головками поперечной резки установлена с возможностью возвратно-поступательного перемещения по направляющим 2. Привод перемещения каретки 1 состоит из кривошипа 3, шарнирно соединенного с шатуном 4 и стойкой 5. Шатун 4 в свою очередь шарнирно соединен с перекладчиком 1-. Привод содержит так- же и гипоциклическую передачу, водилом в которой является кривошип 3, шкив-сателлит 6 жестко соединен с шатуном 4 и цепью 7 с неподвижным (относительно стойки 5) колесом 8„
Для выполнения своего назначения каретка 1 с перекладчиком перемещается из исходного над рольгангом 9 положения в крайнее над столом 10. Длина кривошипа 3 равна длине шатуна 4, а диаметр шкива-сателлита 6 вдвое меньше диаметра неподвижного колеса 8„
Установка работает следующим об- разомо
Кривошип 3 вращается вокруг оси шарнира, которым он соединен со стойкой 5о Так как диаметр шкива-сателлита 6 вдвое меньше диаметра неподвижного колеса 8, все точки, жестко связанные с сателлитом в гипоцикли- ческой передаче, водилом в которой является кривошип 3, перемещаются по траекториям, описываемым уравнением
1
х + I
(R+1)2 (R-1)
т.е. эти траектории представляют бой элнпсы с полуосями.
а R + 1; b R - 1,
где R - длина кривошипа (расстояние между шарнирами, которыми он
Q
5
0 5
0
5
0
соединен со стойкой и кривошипом) ;
1 - длина шатуна (в рассматриваемом случае - расстояние между шарнирами, которыми он соединен с кривошипом и перекладчиком) .
Поскольку в данном устройстве |в силу чего полуось эллипса , a полуось . Следовательно, ось шарнира, которым шатун соединен с кареткой 1 (а следовательно, и перекладчик), перемещается вдоль большой полуоси эллипса, а полный ход равен длине всей оси эллипса, т.е.
2а 2x2R 4R.
Кривошипно-шатунный механизм обеспечивает плавность в начале и в конце перемещения каретки, так как путь перемещения каретки ограничен двумя точками Точность останова в этих точках определяется кинематически, чем исключается необходимость применения специальных средств для обеспечения точности, а минимальным числом звеньев обусловлена простота конструкции, чем, в свою очередь, упрощается обслуживание устройства.
Для исключения перекосов каретки 1 целесообразно применение в составе привода двух идентичных механизмов, шарнирно соединенных с перекладчиком в двух точках, размещенных по разные стороны от точки приложения равнодействующей сил сопротивления перемещению перекладчика При этом для компактности привода в целом целесообразно обеспечение синфазности с синхронностью работы обоих„
-Формула изобретения
Установка для раскроя ленты стекла на форматы по авт„св„ № 977417, отличающаяся тем, что, с целью повышения точности позиционирования и улучшения условий обслуживания, привод перекладчика с вакуум- присосками выполнен в виде по крайней мере одного кривошипно-шатунного механизма с гипоциклической передачей, в которой водилом является кривошип, диаметр сателлита вдвое меньше диаметра неподвижного колеса, а шатун жестко соединен с сателлитом, при этом длина кривошипа равна длине шатуна„
Редактор Н„Гунько
Составитель Н.Борисова
Техред Л.Олийнык Корректор И.Эрдейи
Заказ 467
Тираж 392
ВНИИПИ Государственного комитета по изобретениям и открытиям при ГКНТ СССР 113035, Москве, Ж-35, Раушская наб., д. 4/5
Производственно-издательский комбинат Патент, г. Ужгород, ул. Гагарина, 101
фие.1
Подписное
| Установка для раскроя ленты стекла на форматы | 1981 |
|
SU977417A2 |
