3 ,
роаналоговый 18 преобразователи, звуковой сигнализатор 21, клавиатуру И управления, микро-ЭВМ 12, блок 13 интерфейсов ввода-вывода, индикатор 15 действительных и заданных значений глубины, интерфейс 16 канала связи с каротажной станцией, индикатор 17 цифровой и алфавитной информации.Клавиатура 1А содержит цифровые и функциональные клавиши и работает в режиме прерывания. Оператор устанавливает заданные значения глубины, скорости и натяжения кабеля, удельного веса раст
вора. Используя информацию с датчиков 8 - 10, микро-ЭВМ 12 вычисляет скорость движения и натяжение кабеля Ь. | Реальная скорость движения блока 1 фиксируется датчиком 3. Коррекция скорости производится через преобразователь 18 путем воздействия на двигатель 7. Применение устройства позволяет синхронизировать скорости спуско- подъема кабеля k и блока 1 и предотвратить аварийные ситуации, повысить качество геофизических исследований скважин. 2.з.п. ф-лы, 2 ил.
| название | год | авторы | номер документа |
|---|---|---|---|
| Тренажер для подготовки операторов ПТРК с комбинированной системой наведения | 2018 |
|
RU2692024C1 |
| ПОРТАТИВНАЯ ШИРОКОДИАПАЗОННАЯ РАДИОСТАНЦИЯ | 2023 |
|
RU2804517C1 |
| Каротажная станция | 1988 |
|
SU1749867A1 |
| Каротажная станция | 1981 |
|
SU1035548A1 |
| СИСТЕМА РЕГИСТРАЦИИ ОПЕРАТИВНОЙ ИНФОРМАЦИИ НА СКВАЖИНЕ | 2008 |
|
RU2369740C1 |
| Система дистанционного контроля безопасности при проведении геофизических исследований и работ в действующих газовых скважинах | 2022 |
|
RU2810668C1 |
| УСТРОЙСТВО ДЛЯ КОНТРОЛЯ И УПРАВЛЕНИЯ ПАРАМЕТРАМИ РАБОЧЕГО РЕЖИМА СТРОИТЕЛЬНО-ДОРОЖНЫХ МАШИН С ГИДРОСИСТЕМОЙ | 1992 |
|
RU2049844C1 |
| УЛЬТРАКОРОТКОВОЛНОВАЯ РАДИОСТАНЦИЯ | 2015 |
|
RU2594180C1 |
| СИСТЕМА ОБРАБОТКИ ПОЛЕТНОЙ ИНФОРМАЦИИ | 2000 |
|
RU2169394C1 |
| Комплексно-комбинированный прибор для каротажа скважин | 1983 |
|
SU1087939A1 |
Изобретение относится к исследованию скважин блоками на кабеле. Цель - повышение надежности в работе. Устройство содержит скважинный блок 1, переводник 2 с датчиком движения блока 1, мерный ролик 5 с кабелем 4, лебедка 6 с двигателем 7, датчики 8-10 натяжения сантиметровых и магнитных меток кабеля, пульт 11 управления, включающий источник 30 питания, переключатель 19, аналого-цифровой 20 и цифроаналоговый 18 преобразователи, звуковой сигнализатор 21, клавиатуру 14 управления, микроЭВМ 12, блок 13 интерфейсов ввода-вывода, индикатор 15 действительных и заданных значений глубины, интерфейс 16 канала связи с каротажной станцией, индикатор 17 цифровой и алфавитной информации. Клавиатура 14 содержит цифровые и функциональные клавиши и работает в режиме прерывания. Оператор устанавливает заданные значения глубины, скорости и натяжения кабеля, удельного веса раствора. Используя информацию с датчиков 8-10, микроЭВМ 12 вычисляет скорость движения и натяжение кабеля 4. Реальная скорость движения блока 1 фиксируется датчиком 3. Коррекция скорости производится через преобразователь 18 путем воздействия на двигатель 7. Применение устройства позволяет синхронизировать скорости спуско-подъема кабеля 4 и блока 1 и предотвратить аварийные ситуации, повысить качество геофизических исследований скважин. 2 з.п. ф-лы, 2 ил.
Изобретение относится к промысло- вой геофизике в частности к геофизи- ческим исследованиям в газо-нефтяных скважинах.
Цель изобретения - повышение надежности в работе.
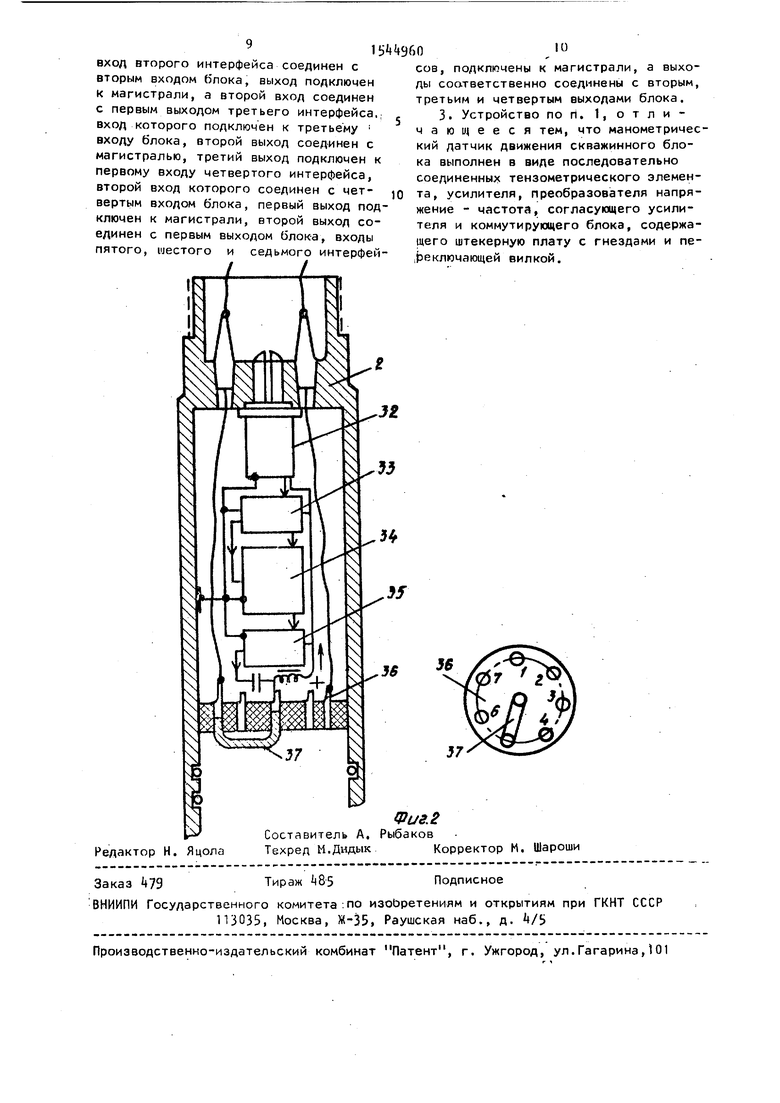
На фиг. 1 представлена структурная |Схема предлагаемого спуско-подъемного устройства; на фиг. 2 - манометрический датчик движения скважинного прибора.
Спуско-подъемное устройство содержит скважинный блок 1, переводник 2, в котором размещен манометрический датчик 3 движения скважинного блока, геофизический кабель 4, мерный ролик 5, лебедку 6, привод (электродвигатель) 7 лебедки 6, датчик 8 натяжения, датчик 9 сантиметровых меток, датчик 10.магнитных меток кабеля, пульт 11 управления лебедчика, который включает в себя одноплатную микро-ЭВМ 12, блок 13 интерфейсов ввода-вывода, клавиатуру 1А управления, индикатор 15 действительных и заданных значений глубины, скорости и натяжения кабеля, интерфейс 16 канала связи с центральной ЭВМ (не показана)- каротажной лаборатории, индикатор 17 цифровой и алфавитной информации о режиме работы устройства, цифроаналоговый преобразователь (ЦАП) 18 управления приводом 7 лебедки 6, переключатель 19 аналоговых сигналов, аналого-цифровой преобразователь (АЦП) 20, звуковой сигнализатор 21. Блок 13 интерфейсов включает интерфейсы 22 - 28 двусторонней связи микро-ЭВМ 12 с элементами и узлами пульта 11 и магистраль 29 связи. Устройство содержит источник 30 питания датиика 3 движения скважин0
5
0
5
0
5
0
5
ного блока и разделительный конденсатор 31 .
Скважинный блок 1 подключен к входам переводника 2, где размещен датчик 3 движения скважинного прибора. Выход переводника 2 соединен с каротажным кабелем Ц, С мерным роликом 5 механически связан датчик 8 натяжения кабеля, выполненный, например, в виде гидг роэлектрического преобразователя дав- лений в электросигнал. Выходы каротажного кабеля k через коллектор лебедки 6 введены в пульт 11 управления и соединены с конденсатором 31. Последний соединен с выходом источника 30 питания и с входом аналогового переключателя 19, второй вход которого соединен с датчиком 8 натяжения кабеля, а выход - с входом АЦП 20, выход которого соединен через интерфейс 22 по магистрали 29 с микро-ЭМВ 12, при этом, по обратному каналу посредством той же магистрали 29 и интерфейсу 22 микро-ЭВМ 12 связана одновременно с АЦП 20 и аналоговым переключателем 19. Через интерфейс 22 с микро-ЭВМ 12 связан звуковой сигнализатор 21. С мерным роликом 5 в механическом зацеплении находится датчик 9 сантиметровых меток, его выход заведен на пульт 11 управления и соединен с входом интерфейса 23, выход которого по магистрали 29 соединен с микро-ЭВМ 12 и от-, дельным каналом подключен к интерфейсу 24. Выход датчика 10 магнитных меток также заведен на пульт 11 управления и посредством интерфейса 2k по магистрали 29 соединен с микро-ЭВМ 12, а отдельным каналом связан с интерфейсом 25 о
5 к
Клавиатура , состоящая из 24 клавиш, соединена с входом интерфейса 2i, один выход которого по магистрали 29 соединен с микро-ЭВМ 12, а второй выход соединен с индикатором 15 действующих и заданных значений глубины, скорости и натяжения кабеля.
Клавиатура 14 состоит из блока клавиш, служащих для ввода цифровых зна- чений и имеющих обозначения от О до 9м, Запятая и 36 (забой), и функционального блока, содержащего
жением скважинного прибора и обозначенные : Напр (вверх), Напр (вниз) Скор СП (скор.скв. прибора), клавиши V, Н, 4F, G, осуществляющие ввод ранее набранных значений скорости скважинного блока V, его глубины Н, предельного натяжения jF и удельного веса бурового раствора G; клавиши Пуск ДВ, Обороты (вверх) Обороты (вниз), Стоп ДВ, осуществляющие управление работой привода 7 лебедки 6; клавиша ВК служит для ввода в микро-ЭВМ 12 ранее набранных значений У,Н,дК, G для исполнения. Датчик 3 движения скважинного прибора, размещенный в корпусе переводника 2, содержит тензометрический элемент 32 давления и электронную схему, состоящую из усилителя 33, преобразователя 34 типа напряжение - частота, согласующего усилителя 35 и коммутирующего блока 36 в виде штекерной платы с контактными гнездами по окружности и одним гнездом в центре и соединительной вилки 37.
Устройство работает следующим образом.
При соединении скважинного блока. 1 с кабелем 4 в переводнике 2 устанавливают коммутирующую вилку 37 в положение, обеспечивающее подключение датчика 3 движения скваяинного блока 1 к свободной жиле кабеля 4. Соединяют пульт 11 лебедчика с сетью электрического питания. После ввода блока 1 в скважину на некоторую глубину подают питание на датчик 3 движения скважинного блока и проверяют соответствие его показаний, а также исправность всего устройства по всем параметрам автоматического управления лебедкой 6. Устанавливают заданное значение команд на пульте 11 в соответствии с предстоящей спуско-подъем ной операцией.
При подаче питания на пульт 11 уп- .равления микропроцессор микро-ЭВМ 12 производит начальную установку режимов работы всех микросхем и индикаторов 15 и Г/. На индикаторе Г/ высвечивается первое сообщение (подсказка) оператору Ввести значение скорости. Клавиатура 1 работает в режиме прерывания при нажатии любой из клавиш возникает сигнал Запрос прерывания. Микропроцессор микро-ЭВМ 12 анализирует сигнал прерывания от клавиатуры 14 и распознает тип нажатой клавиши.
5 При неправильном наборе на индикаторе 17 высвечивается соответствующее сообщение. После правильного задания параметров технологических значений происходит анализ клавиш управления
0 двигателем У. После пуска двигателя 7 начинается сбор и анализ информации от датчиков 3 и 8 - 10. При этом ведется подсчет сантиметровых меток, коррекция последних по магнитным мет5 кам, передача информации о глубине в центральную ЭВМ. Вычисляется скорость двимения кабеля Ц. Кроме того, исходя из значения натяжения кабеля 4, глубины и удельного веса раствора
0 вычисляется Л натяжения. Все реальные значения технологических параметров отображаются на индикаторе 15 и оператор имеет подробную информацию о работе станции. Исходя из данных от датчика 3 движения скважинного блока вычисляется реальная скорость скважинного блока 1, которая затем сравнивается со скоростью движения кабеля 4. Если и скоростей превышает ранее
Q заданную величину, то микропроцессор микро-ЭВМ 12 посылает команду на уменьшение скорости спуска, и выдается соответствующее сообщение на индикатор 12. Пели А скоростей нормали5 зуется, то происходит автоматическое восстановление первоначально заданной скорости спуска блока 1. В противном случае оператор берет управление спуско-подъемном на себя. Тем самым
0 исключается перепуск кабеля и возникновение аварийной ситуации.
В датчике 3 движения скважинного блока 1 применяется тензометрический 5 элемент 32 давления типа Д-100, преобразующий давление в электрический сигнал (номинальный диапазон 0-100 МПа; выходной сигнал до 460 мВ). С целью использования только одной жилы кабе5
ля 4 и для питания датчика 3 постоянным током с поверхности(а также для передачи информации на поверхность, выходной сигнал элемента 32 преобра- 5 зуется в частоту переменного тока, пропорциональную величине сигнала.Для обеспечения раскачки в достаточно широком диапазоне частот (2-10 кГц) применяется предварительный усилитель ю 33. Кроме того, в связи с тем, что /схема дифференциального преобразователя не разрешает прямого соединения |его выхода с проводами питания и корпусом, введен согласующий усили- 15 тель 33.
В качестве датчика 9 сантиметровых меток используют серийный фото-электрический измерительный преобразовав тель круговых перемещений типа ВЕ-178,20 который укреплен на измерителе длины и натяжения (ИДНК), установленном непосредственно на лебедке 6 (не показан) .
При реализации цифровой схемы уст- 25 ройства используют следующие радиотехнические элементы: одноплатная микро- ЭВМ 12 - на основе однокристальной микро-ЭВМ К1801ВМ1; катодолюминисцент- ные индикаторы ИВ-27 - в качестве ин- 30 дикаторов 15; интерфейс 16 связи с центральной ЭВМ - на1 основе синхронно-асинхронного приемопередатчика КР580ВВ51; индикатор 1 цифровых и
15 9608
ник с каротажным кабелем, мерный ролик, лебедку с двигателем, датчики магнитных меток и натяжения кабеля, конденсатор, источник питания, соединенный с выходом каротажного кабеля и первым выводом конденсатора, отличающееся тем, что, с целью повышения надежности работы, оно снабжено размещенным в переводнике манометрическим датчиком движения скважин- ного блока, датчиком сантиметровых меток кабеля и пультом управления, выполненным в виде переключателя, аналого-цифрового и цифроаналогового преобразователей, клавиатуры управления, индикатора действительных и заданных значений глубины, скорости и натяжения кабеля, индикатора цифровой и алфавитной информации, мик- ро-ЭНМ, интерфейса канала связи с каротажной станцией и блока интерфейсов ввода-вывода, причем второй вывод конденсатора соединен с первым входом переключателя, второй вход которого подключен к выходу датчика натяжения кабеля, вывод соединен с входом аналого- цифрового преобразователя, выход ко-, торого подключен к первому входу блока интерфейсов ввода-вывода, второй, третий и четвертый входы которого соединены соответственно с датчиком сантиметровых меток кабеля, датчиком магнитных меток кабеля и клавиатурой уп буквенных значений ИГПС1-222/7 (инди- ,с равления, первый, второй, третий, четI J tUW
катор газоразрядный с самосканированием) ; ЦАП 18 - на основе КР572ПА1; аналоговый переключатель 19 микросхема К 591КН1; АЦП 20 - микросхема К 572ПВ1; параллельные интерфейсы 22 40 и 26 - 28 - микросхемы КР 580ВВ55; ин- терферейс 23 - микросхема КР 580ВИ 53 (таймер); интерфейс 2k - микросхема КР 589ИК14 (контроллер прерываний); интерфейс 25 - К580ВВ79 (контроллер 45 клавиатуры и индикации).
Применение предлагаемого устройства позволяет синхронизировать скорости спуска-подъема скважинного блока 1 у кабеля и предотвратить перепус- JQ ки кабеля 4, повысить качество геофизических исследований скважин, умень-. шить вероятность аварий.
Формула изобре-тения
лик, лебедку с двигателем, датчики магнитных меток и натяжения кабеля, конденсатор, источник питания, соединенный с выходом каротажного кабеля и первым выводом конденсатора, отличающееся тем, что, с целью повышения надежности работы, оно снабжено размещенным в переводнике манометрическим датчиком движения скважин- ного блока, датчиком сантиметровых меток кабеля и пультом управления, выполненным в виде переключателя, аналого-цифрового и цифроаналогового преобразователей, клавиатуры управления, индикатора действительных и заданных значений глубины, скорости и натяжения кабеля, индикатора цифровой и алфавитной информации, мик- ро-ЭНМ, интерфейса канала связи с каротажной станцией и блока интерфейсов ввода-вывода, причем второй вывод конденсатора соединен с первым входом переключателя, второй вход которого подключен к выходу датчика натяжения кабеля, вывод соединен с входом аналого- цифрового преобразователя, выход ко-, торого подключен к первому входу блока интерфейсов ввода-вывода, второй, третий и четвертый входы которого соединены соответственно с датчиком сантиметровых меток кабеля, датчиком магнитных меток кабеля и клавиатурой уп tUW
вертыи, пятый и управляющий выходы блока интерфейсов ввода-вывода подключены соответственно к индикатору действительных и заданных значений глубины, скорости и натяжения кабеля, ин-. терфейсу канала связи с каротажной стзницей, индикатору цифровой и алфавитной информации, цифроаналоговым преобразователем, звуковым сигнализатором, управляющими входами переключателя и аналого-цифрового преобразователя, при этом микро-ЭВМ соединена с магистралью блока интерфейсов ввода- вывода, а выход цифроаналогового преобразователя подключен к двигателю. 2. Устройство по п. 1, о т л и - чающееся тем, что блок интерфейсов ввода-вывода выполнен в виде семи интерфейсов, причем вход первого интерфейса соединен с первым входом блока, первый, второй и третий выходы подключены соответственно к управляющему выходу блока, пятому выходу блока и магистрали блока, первый
вход второго интерфейса соединен с
вторым входом блока, выход подключен к магистрали, а второй вход соединен с первым выходом третьего интерфейса, вход которого подключен к третьему входу блока, второй выход соединен с магистралью, третий выход подключен к первому входу четвертого интерфейса, второй вход которого соединен с четвертым входом блока, первый выход подключен к магистрали, второй выход соединен с первым выходом блока, входы пятого, шестого и седьмого интерфей15М
Редактор Н. Яцола
Составитель А. Техред М.Дидык
960, |0
сов, подключены к магистрали, а выхо10
ды соответственно соединены с вторым, третьим и четвертым выходами блока. 3. Устройство по п. 1, отличающееся тем, что манометрический датчик движения скважинного блока выполнен в виде последовательно соединенных тензометрического элемента, усилителя, преобразователя напряжение - частота, согласующего усилителя и коммутирующего блока, содержащего штекерную плату с гнездами и переключающей вилкой.
J2
Фиг. 2
Рыбаков
Корректор М. Шароши
| Геофизические методы исследования скважин./Справочник | |||
| Под ред | |||
| В.Н | |||
| Запорожца | |||
| - М.: Недра, 1У83, с | |||
| Способ запрессовки не выдержавших гидравлической пробы отливок | 1923 |
|
SU51A1 |
