Известно, 4jo основными устройствами, используемыми для ноглощеиия избыточной реактивной мощности в сетях, вырабатываемой в-моменты провала графика нагрузки, являются синхронные комиенсаторы, работающие в режиме недовозбуждения. Однако .максимальная величина реактивной мощности, потребляемой синхронным компеиеатором, колеблется в нределах 0,45-0,65 от его номинальной мощности, т. е. обычно в режиме нотреблекия реактивной мощности комиенсатор недогружен. Это объясняетея тем, что регуляторы ;1анряжения, установленные на комгггнсаторах, не обеспечивают устойчивой работы их ири регулировании напряжения в р(;жи1у;ах с отрицательным возбуждением.
Известные снособы регулирования возбуждения синхронных комнеисаторов имеют ряд недостатков. Чтобы обеспечить необходимую реактивную моилность в индуктивном режиме регулированием момента на валу функции внутреннего угла синхронного компенсатора, на одном валу с последним устанавливают двигатель больщой мощности, что приводит к удорожанию устройства, так как применяется асинхронный нуск даже круииых синхронных комнеисаторов. Другой известный еиособ обеспечения потребления реактивной мощно(где и - папрясти, величина которой
Xq
жеппе на зажимах компенсатора п Xq - реактивное сопротивление по поперечной оси),
поворотом ротора на 90 эл. град, и удержанием его в этом положении путем регулирования возбуждения в функции угла требует установки двух регуляторов. Один из этих регуляторов работает в нормальном режиме компенсатора при внутреннем угле между напряжением на зажимах компенсатора и его э.д.с. 6 0 и выполняет функции автоматического регулятора возбуждения, другой работает при 6 90° и только удерживает ротор
при заданном угле. Совместная работа этих регуляторов невозможна, так как действие их разионаправлено. При таком способе усложняется работа системы регулирования возбуждения и снижается ее надежность. Кроме того иабор реактивной нагрузки неплавный стуиеичатый, что обусловлепо переключением регулирования возбуждения с одного регулятора на другой.
Предлагаемый еиособ дает возможность
обесиечить максимальное потребление реактивной мощности, величина которой равиа т„ . , т. е. той же мощности, что и при притоматического регулирования. Это достигается путем введения в систему автоматического регулирования ограничения тока возбуждения в функции внутреннего угла компенсатора с зоной нечувствительности, соответствуюшеи критическому значению этого угла.
Введением в систему регулирования сигнала, пронорционального ироизводной внутреннего угла, повышается устойчивость работы комиенсатора.
При подаче отрицательного возбуждения EJ в ротор компенсатора для увеличения нотребления реактивной мондности создается отрицательный электромагнитный момент, который стремится вытолкнуть полюс ротора из его нрежного положения. Машина до определенного отрицательного значения тока удерживается в синхронизме за счет явнонолюсности. Но при отрицательном возбуждении, превышающем некоторое предельное значение Ef{. , ротор перестает удерживаться полем статора и провертывается па одно полюсное деление. В этом ноложении компенсатор переходит в режим выработки реактивной мощности. Такое онрокидывание может происходить и в моменты кратковременного снижения напряжения на выводах комненсатора.
При учете потерь величина rf,.,, получается несколько меньшей, чем в идеальном компенсаторе (без потерь), и появляется некоторый предельный (критический) угол б,,, нри котором нроисходит опрокидывание. Очевидно, что этот предельный угол не одинаков для компенсаторов разных типов и зависит от величины потерь.
Увеличение внутреннего угла б компенсатора при увеличении отрицательного возбуждения Е дает возможность стабилизировать работу компенсатора при отрицательном возбуждении по углу. Отрицательное возбуждение Е ограничивается но внутреннему углу б компенсатора с зоной нечувствительности, равной критическому значению 6,,. этого угла. Качания ротора стабилизируются введением сигнала, нропорционального пронзводной б этого угла. Ограничение ветунает в работу только нри достижении ротором критического угла. Так как внутренний угол синхронного ком 1енсатора при отрицательном возбуждении, меньшем ,/ (а также нри любом положительном возбуждеиии), всегда измеияется в пределах критического угла, при котором происходит опрокидывание, то введение указанного ограничения не мешает работе автоматического регулятора возбуждения. поддерл :ивающего иеизмениый уровень нанряжения па шинах комненсатора. Только при превышении критического угла (или угла несколько меньшего 6,., ), на который настраивается схема ограничения, иа дополнительный вход автоматического регулятора возбуждения подается мощный сигнал в сторону форсировки возбуждения, и ротор компенсатора не может опрокинуться. То же самое нроисходнт и при снижении напряжения па зажимах кол пенсатора при колебапиях напряжения сети.
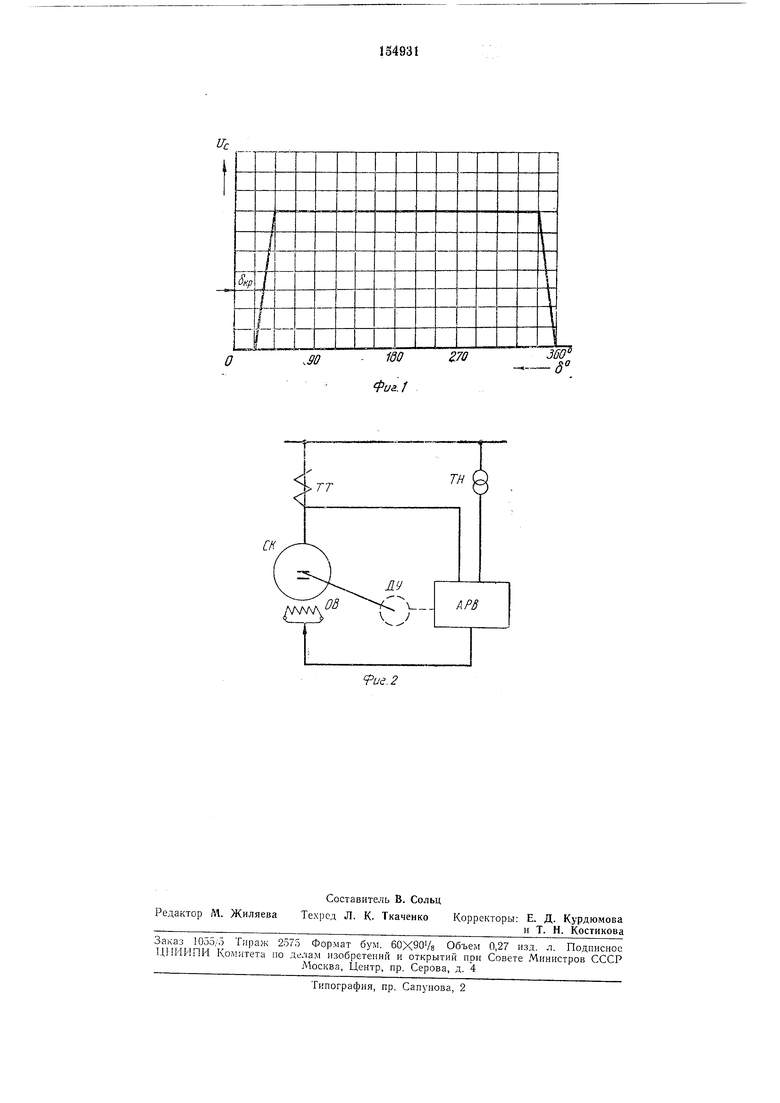
На фиг. 1 показан график зависимости напряжения Uf. сигнала, вводимого в систему автоматического регулирования возбуждения; от отклонения угла; иа фиг. 2 - принципиальная схема устройства для осуществления предлагаемого еиособа.
Представленный на фиг. 1 закон изменения сигиала по отклонению угла дает возможность ротору при нглнчии автоматического регулятора возбуждения вернуться к углам, близким к нулю, после снятия короткого замыкания,
если |)отор во зремя последнего смог уйти достаточно далеко от 90° (например, на 120- 150).
На вал синхронного комненсатора С/С устанавливают электромагнитный датчик ДУ синусоидального нанряжепия с фазочувствнтельной схемой, дающей на выходе постоянное напряжение, изменяющееся в функции угла, как показано на фиг. 1. Это панря кение днфференцируется, и оба сигнала, пронорциопальпые углу 6 и производной б этого угла, но двум входам е онределенными коэффициентами усиления подаются на сум.дчатор автоматического регулятора возбуждения АРБ, питаемого от трансформаторов тока ТТ и нанряжения ТН. С выхода этого регулятора подается сигнал на обмотку возбуждения ОВ KOMneiicaTopa С/С
Таким образом, предлагаемый способ обеспечивает возможпоеть устойчивой работы
1сомпенсатора нри предельном критическом возбуждении, что позволяет плавно регулировать потребление реактивной мощности
компенсатора до значения
с помощью
Хд
основного авто1матического регулятора возбуждения. При этом исключается необходимость установки какого-либо устройства для ограничеиия минимального тока ротора.
Предмет изобретения
i. Способ регулирования возбуждения синхронного компенсатора, снабженного автоматическим регулятором возбуждения и работающего в режиме потребления реактивной мощности при отрицательном возбуждении, итличающийся тем, что, с целью повышения использования компенсатора в указанном режиме и упрощения системы автоматического регулирования, в последнюю вводят ограничение тока возбуждения, оеуществляемое в функцни виутреннего угла компенсатора с зоной нечувствительности, соответствую1дей критическому значе 1ию этого угла.
2. Сноеоб по п. 1, отличающийся тем, что для повышения устойчивости работы компеисатора в систему регулировапия вводят сигнал, пропорц1юнальный производной в-нут

| название | год | авторы | номер документа |
|---|---|---|---|
| Способ регулирования реактивной мощности выпрямительно-инверторной подстанции | 1978 |
|
SU785940A1 |
| УСТРОЙСТВО для РЕГУЛИРОВАНИЯ РЕАКТИВНОЙ МОЩНОСТИ в ЭНЕРГОСИСТЕМАХ | 1970 |
|
SU279777A1 |
| Система автоматического регулирования возбуждения реверсивного синхронного компенсатора | 1985 |
|
SU1309253A1 |
| Автоматический регулятор реверсивного синхронного компенсатора | 1975 |
|
SU612379A1 |
| Способ перевода синхронного компенсатора с обмотками возбуждения на роторе по продольной и поперечной осям из режима выдачи в режим их потребления реактивной мощности и обратно | 1975 |
|
SU567198A1 |
| Устройство для возбуждения синхронного компенсатора | 1972 |
|
SU440757A1 |
| Способ управления бесщеточной синхронной машиной | 1985 |
|
SU1305821A1 |
| Устройство для регулирования возбуждения синхронного компенсатора | 1959 |
|
SU127741A1 |
| Поляризационный модулятор-компенсатор угла поворота плоскости поляризации света | 1978 |
|
SU744421A1 |
| СПОСОБ УПРАВЛЕНИЯ ВОЗБУЖДЕНИЕМ СИНХРОННЫХ ДВИГАТЕЛЕЙ НАСОСНЫХ СТАНЦИЙ | 2024 |
|
RU2839885C1 |